半挂汽车侧翻预警算法研究综述
2022-04-02李明桃高久懿张永辉李德文
李明桃,高久懿,张永辉,李德文
(南京林业大学 汽车与交通工程学院,江苏 南京 210037)
随着重型货车技术性能的提升,以及大宗货物中长距离运输客观需求的不断增加,半挂汽车在高速公路上的交通量占比迅速上升,自2006年开始到2010年,由20.47%爬升至41.85%,自2010年后窄幅震荡,于2018年达到历史峰值47.94%。此外,从货物周转量上来看,半挂列车由最初的货物周转量占比不足60%,持续上升至2011年的82.31%,并随着 6轴货车的出现与普及,持续增长至2018年的86.32%。随着高速公路的综合化发展,重型半挂列车占比仍将不断提高。
半挂汽车列车的占比提高也带来了不可避免的半挂汽车列车交通事故占比提高,半挂汽车因为其载重量大,轮距短,以及行驶时车身质心位置高,车身长等特点,在运输过程中极易发生弯道失稳侧翻,导致严重的交通事故。2015年,美国国家交通安全局的统计资料显示,其全年涉及半挂汽车列车的严重交通事故有 3 598起,占比29%,死亡人数达3 903人,占交通事故死亡总人数的 47%。因此,很多研究人员在研究半挂车失稳机理的同时,也开始着手半挂车侧翻预警系统的研究,并在此基础上开展了很多算法的开发与应用。本文总结了传统的半挂车侧翻预警系统的优缺点,对现有侧翻预警算法的特点进行了分类,在此基础上概括了每一类侧翻预警算法的特点,并对下一步的研究方向进行了展望。
1 半挂车侧翻失稳机理
1.1 半挂车侧翻失稳类型
半挂车侧翻类型与汽车侧翻类型较为一致,基本上分为两类:在路侧翻和离路侧翻,如图1所示。
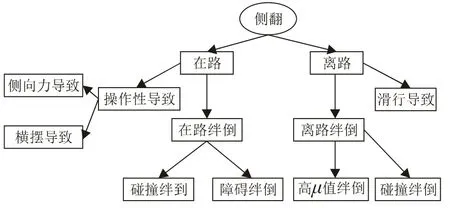
图1 侧翻类型[2]
其中,在半挂车弯道行驶时,侧翻类型大致有两种:(1)车辆速度超过阈值,在过大离心力的作用下,车辆行驶中的侧向加速度过大,从而导致侧翻;(2)车辆横摆稳定性丧失,继而侧向滑移绊倒,导致交通事故发生。
1.2 半挂车失稳影响因素
半挂车侧翻事故高发地段在公路的弯道部分,然而,使半挂车失稳侧翻的原因也是多种多样的,人车路是构成交通的三要素,同时也是影响半挂车行驶安全最主要的三个要素。
1.2.1 半挂车结构因素
半挂车由牵引车和拖车通过鞍座铰链连接而成,两个部分相互影响,使半挂车的动力学模型及其复杂;转弯行驶时,由于拖车后轴距离连接点较远,驾驶员在驾驶过程中对于后轴部分的侧倾状态感知较弱,无法提前预知车辆状态,极其容易在转弯时发生侧翻事故。且半挂车由于牵引车与拖车两部分通过铰链连接,转弯时产生尾部放大效应,使得侧倾状态在拖车尾部进一步放大,此时半挂车横向载荷转移率加大,车轮很容易离地从而导致侧翻。
半挂车的质心较高,且载荷较大,不同的装载物品在弯道行驶时对于半挂车整体质心影响不同,导致半挂车转动惯量不同,使半挂车侧倾稳定性降低,极其容易导致侧翻。
1.2.2 驾驶员操作因素
半挂车的侧倾稳定性较弱,在弯道行驶时,由于离心力的影响,车速越高,侧向加速度越大。较高的车速会使半挂车侧向加速度超过阈值,侧倾稳定性下降而容易侧翻;
同时,在连续弯道部分,驾驶员会频繁转动方向盘以修正转向,半挂车载重量大时侧倾惯量也较大,频繁转向会使车辆侧倾角速度加大,使侧翻事故发生。
半挂车在弯道部分,驾驶员需要进行制动以控制车速,然而,过大的制动力会使车辆横向载荷转移率迅速增大,发生瞬态侧翻。
1.2.3 道路因素
道路的路面抗滑性能对半挂车行驶性能具有极大的影响。与干燥的道路路面相比,潮湿、降雪或结冰的道路路面附着性降低,在弯道行驶时极易产生侧滑从而导致半挂车侧翻,会增大半挂车道路运输的危险性。同样的,若路面粗糙度太高,则会增大半挂车轮胎的磨损,影响半挂车的行驶安全。同时,过长的直行道路会对驾驶员的视觉反应以及心理承受能力产生极大的影响,过长时间的直线行驶会让驾驶员产生过于烦躁的感受,对于半挂车长途运输来说,烦躁的心理极其影响驾驶员的反应与判断,是运输安全里的极大隐患。
1.3 半挂车侧翻稳定机理
为了阐述半挂车侧翻失稳机理,建立如图 2所示的稳态转向下半挂车侧翻稳定模型。其中为整车质量;a为半挂车重心处的侧向加速度;为车辆重心高度;、为车辆两侧轮胎垂直载荷;为轮胎间距;Δ为车辆重心相对于轮距中心点的偏移量。车辆重力作用在车辆重心处的外部侧向惯性力形成侧翻力矩..a;由于车辆顺从特性而使车辆重力作用在轮距中心侧偏点形成另一个侧翻力矩.Δ。由于车辆顺从特性而使轮胎垂直载荷从内向外转移形成一个与侧翻力矩对抗平衡的侧翻稳定力矩(-)./2。
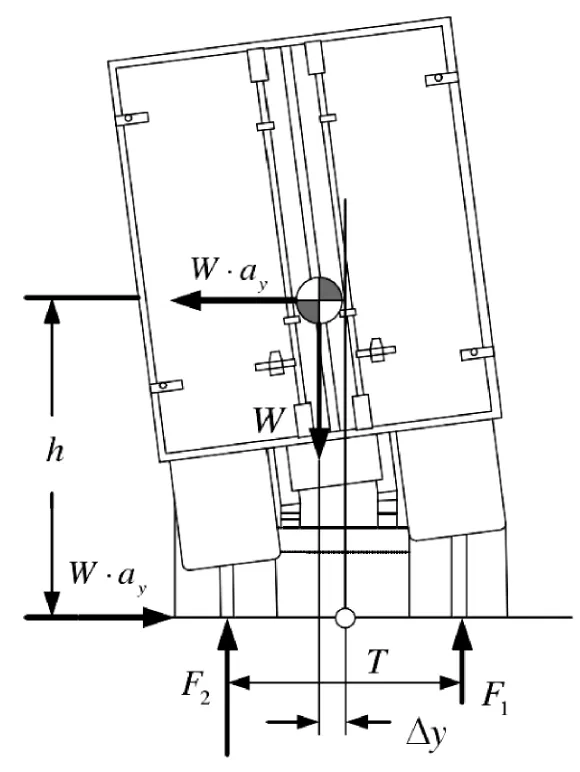
图2 稳态转向下半挂车侧倾模型
至此,得到车辆绕轮距中心点侧倾力矩平衡方程

由式(1)得,半挂车发生侧翻的临界条件为=-,此时左右车轮垂直载荷均转移到外侧轮胎上。
2 半挂车侧翻预警典型算法
2.1 侧向加速度监测法
加拿大REKHEJA和 PICHE于1990年在静态转向条件下,以低速时车辆的侧向加速度以及高速时车辆车轴侧倾角的状态为侧翻指标,通过判断其是否在安全阈值范围内来判定危险等级,并以此对驾驶员进行安全警示;澳大利亚墨尔本道路使用研究中心于1997年基于侧向加速度监测法开发了一套侧翻预警系统,将实时监控的侧向加速度数据与预先计算出的极限值进行比较,并据此判断车辆运行状态,通过车载蜂鸣器及时提醒驾驶员,达到预警效果;2007年,Sverrisson以实际侧向加速度占极限侧向加速度百分比大小为标准来进行预警。
基于车辆侧向加速度的预警方法以静态条件为主要条件,将车辆视作刚体,不考虑车辆运动时的动态特性,过于简单。且以单一的侧向加速度、侧倾角等参数作为预警的标准,不够准确,效果较差。
2.2 横向载荷转移率法
Preston-Thomas和Woodrooffe 以横向载荷转移率(Lateral-load Transfer Rate, LTR)作为判断车辆侧翻的指标,LTR监测车轮垂直受力,将车辆两侧垂直受力载荷之差与车辆两侧垂直受力载荷之和的比值作为指标。其定义为

当左右侧轮胎垂直受力载荷均匀(横向载荷转移率为0时),LTR=0;若车辆某一侧轮胎垂直载荷消失,即轮胎离地,LTR=1,此时,车辆侧向加速度达到阈值。
横向载荷转移率法的精确度远高于传统的只考虑静态条件的单一参数预警法,因此,自Preston-Thomas和Woodrooffe后,越来越多的学者以LTR为侧翻预警指标进行侧翻预警系统设计并对其进行了改进;韩国汽车研究中心在LTR的基础上考虑了悬架与轮胎的参数,根据其非线性特点,使预警算法更加贴合实际;2013年,LARISH建立 LTR模型时考虑了车辆转向与侧向加速度,对预测的实时性进行了改善,此算法可以更为精准地在车辆运行过程中调整侧翻的阈值,即可预测的横向载荷转移率算法(PLTR);在考虑车辆系统时滞性的问题上,张志勇在LTR模型中加入了灰色模型法,田顺在此基础上加入了弱化算子,进一步提升了半挂车在复杂工况下的预警。
LTR作为车辆侧翻指标,除了关注轮胎压力,不需要考虑车辆其他的影响因素,普适性较好,但汽车行驶过程中左右车轮的载荷不易测量,LTR值获取不易,需要一定的优化模型进行改进。
2.3 侧翻保护能量储备法
侧翻保护能量储备法由密苏里大学哥伦比亚分校 NALECZ在 1993年提出,表示为汽车从当前位置状态变化到侧翻位置时所需要的能量差。
该算法以 RPER值的正负作为判断车辆侧翻的标准,即 RPER值为正值时,车辆正常运行;当 RPER值为负值时,车辆将出现侧翻状况。此后,黄明亮等对侧翻保护能量储备法进行了改进,考虑了车速、侧倾角、侧倾角速度以及转向角等参数,将其整合,得出干扰系数,并据此建立了侧翻预警系统。
侧翻保护能量储备法具有实时性,也较为简便,可以很好地实现侧翻预警。
2.4 侧翻失稳评价指标
LIU所提出的侧翻失稳评价指标与 LTR相近,范围值在-1与1之间。其定义为

侧翻失稳评价指标充分考虑了半挂车辆运行时的侧向加速度和车轴侧倾角,更为适应不同车辆的尺寸以及驾驶员的驾驶习惯,尤其是对于非绊倒侧翻和绊倒侧翻工况具有良好的普适性。
2.5 物理样机
美国密歇根大学交通运输研究中心 UMTRI开发了一套名为RSA的物理样机,通过视觉刺激为驾驶人员进行预警,这个系统在汽车稳定运行后,测量侧向加速度,将其与极限值进行对比。
此系统的优势在于,具有实时性,根据车辆运行时测得的车辆载荷变化与车辆具体参数,对极限值进行动态调节,对于以后的车载预警系统开发具有一定的启发,专利 WO2004110809就参考了RSA物理样机,对设计的预警系统进行了相应的改进。
2.6 侧翻时间预警法
CHEN和PENG等,建立侧翻时间预测矩阵,在此基础上提出了TTR算法,该算法以车辆正常行驶到一侧车轮离开地面而发生侧翻的时间为判断标准,即将方向盘转角代入到建立的动态车辆模型中计算,若计算值为N秒,则表示车辆根据当前的运行状态,在N秒后,车辆的横向载荷转移率LTR≥1,此时车辆侧翻。理想状态下TTR工作原理如图3所示。
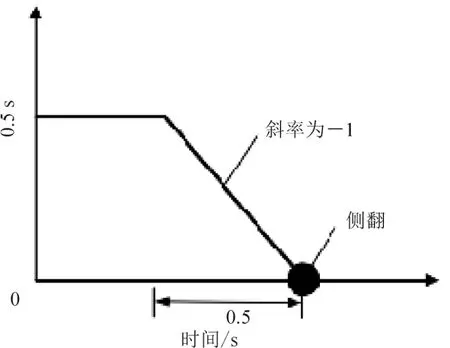
图3 理想状态下TTR工作原理
CHEN为了提高由于模型过于简单而降低的精度,还引入了神经网络进行改善,但这也使模型的实时性降低。由于 CHENEY所提出的 TTR算法模型建立单一,因此,为了改善其实时性,H.YU为了改善其实时性,引入了Kalman滤波估计算法,在其建立的5自由度模型中通过Kalman滤波算法的反馈控制,将更多的车辆参数(侧倾角、车速、车辆模型、侧向加速度等)纳入参考,进行优化估计。同时,H.YU还将TTR预警指标进行分层递进预警设置,从车速与转向两方面入手,第一级于车速快速变化下进行预警,第二级考虑了剧烈转向工况,综合性强。TTR预警法引入国内后,许多学者对其进行了深入研究与改进,其中,黄杰燕使用 TruckSim和 Matlab软件建立半挂车的5DOF车辆模型,在TTR预警算法的基础上,开发了LQR防侧翻控制算法。LQR控制算法通过差动控制可以有效地优化控制横摆力矩以避免侧翻。成光华在TTR预警算法的基础上设计了基于ARM7的侧翻预警器。吉林大学对于TTR算法也展开了深入的研究,朱天军总结了国内外 TTR预警算法的研究状况,引入 Kalman滤波,改进了TTR算法,对影响侧翻效果的因素(载荷、质心等)进行了处理,实车验证也使得改进后的TTR算法更为精准。
3 国内外预警方法
3.1 典型算法归类分析
3.1.1 基于静态门限值的侧翻技术分析
基于静态门限值的侧翻预警是以静态条件为主要条件,例如:侧向加速度监测法等。该类算法将车辆视作刚体,不考虑车辆运动时的动态特性,以侧向加速度以及侧倾角等单一的静态的指标来进行侧翻预警。根据车型与车况的不同预先计算不同的侧翻阈值,预警系统判断监测值是否超过设定阈值,根据情况进行预警与控制。
3.1.2 基于动态门限值的侧翻技术分析
基于动态门限值的侧翻预警综合考虑动态条件,例如横向载荷转移率法(LTR)、侧翻保护能量储备法(RPER)、RSA(Rollove Stability Adviser)物理样机、侧翻时间预警法(TTR)等。该类算法建立车辆动力学模型,综合考虑侧向加速度以及侧倾角等等车辆参数指标,实时推算车辆状态,提高准确性。
3.1.3 算法模型性能对比
基于静态门限值的侧翻预警算法,例如基于车辆侧向加速度的预警方法等,以静态条件为主要条件,将车辆视作刚体,不考虑车辆运动时的动态特性,过于简单。且以单一的侧向加速度、侧倾角等参数作为预警的标准,不够准确,效果较差。
受限于静态门限值预警方法精确性不足,越来越多的学者综合考虑车辆的实时动态性,研究出了基于动态门限值的侧翻预测方法。其中横向载荷转移率法以LTR作为车辆侧翻指标,除了关注轮胎压力,不需要考虑车辆其他的影响因素,普适性较好,但汽车行驶过程中左右车轮的载荷不易测量,LTR值获取不易,需要一定的优化模型进行改进。侧翻保护能量储备(RPER)法具有实时性,也较为简便,可以很好地实现侧翻预警。RSA物理样机系统的优势在于实时性,根据车辆运行时测得的车辆载荷变化与车辆具体参数,对极限值进行动态调节,对于以后的车载预警系统开发具有一定的启发。传统的侧翻时间预警法在动态预警时,门限值选用的是车辆质心处的侧倾角,但车辆质心会发生变化,导致门限值难以选定。后来的学者总结了国内外TTR预警算法的研究状况,改进了TTR算法,对影响侧翻效果的因素(载荷、质心等)进行了处理,实车验证也使得改进后的TTR算法更为精准。
3.2 当前预警算法的不足
基于侧向加速度、侧倾角等静态条件的预警算法由于其只考虑假设刚体而缺乏准确度逐渐退出半挂车预警算法的舞台。但是目前所研究的动态模型,例如LTR算法、TTR算法等,还是更多基于理想的行驶状态,未考虑到因天气变化而所导致的行车条件变化。此外,驾驶员的操作习惯与应变能力对于交通的影响还是在一定程度被忽视。同时,不同的道路环境不同对于行车安全的影响也不相同,目前的模型对于道路条件因素的影响很少考虑,只有综合人车路三要素的模型才能具有普适性。
3.3 国内外侧翻预警算法的发展趋势
随着交通的智能化发展,交通安全愈加重要,半挂车作为未来交通构成的重要组成部分,对于侧翻前预警与控制的主动控制研究也渐渐取代被动安全的研究;5G通信技术的成熟与发展也带动了车路协同及车联网的发展,例如车载自组网(Vehicular Ad Hoc Network,VANET)的发展,VANET使邻近车辆的相关信息实现交互,有效地实现驾驶安全预警,使侧翻预测模型考虑的因素和参数逐渐系统和全面化;同时灰色预测模型、BP神经网络等模型逐渐融入交通安全研究中,半挂车预警算法的开发愈加多样与有效。
4 结语
高速公路的铺设与发展,带动了以重型半挂汽车为载体的道路运输业蓬勃发展,同时,半挂车的行驶安全问题也日益突出。为使半挂汽车在道路运输过程中更加安全,半挂汽车侧翻预警研究在未来智能交通的安全领域中将占有重要地位
本文详细介绍了目前典型的半挂车侧翻预警算法,对各种算法的优缺点进行了对比并针对半挂车预警方法的发展方向进行了详细分析,总结出目前半挂车预警方法的不足和未来的发展方向。
