基于卷积神经网络的路面湿滑状态检测系统
2022-04-02黄立红畅宏达崔康柬高俊英
黄立红,畅宏达,崔康柬,高俊英,李 瑾
(长安大学 汽车学院,陕西 西安 710064)
在对车辆控制算法进行稳定性或轨迹控制进行参数化时,路面摩擦系数是影响控制性能的一个重要模型参数,影响摩擦系数的一个主要因素是路面湿滑状态。车辆行驶在湿滑道路上时,轮胎与路面间附着系数下降,导致车辆操纵稳定性和行驶安全性下降,易引发道路交通事故。此外,对路面湿滑状态进行检测是高级驾驶辅助系统和无人驾驶车辆完成道路环境感知的一项重要任务。因此,研究路面湿滑状态对保障驾驶人安全,减少道路交通安全事故,推动驾驶辅助系统和无人驾驶的发展具有重要意义。
传统图像处理技术面临的一个严峻问题是人工分析和提取特征导致模型泛化能力弱。深度学习较传统图像处理技术有较高的检测准确率和较好的模型泛化能力,在图像处理领域得到了广泛应用,为路面湿滑状态检测提供了新的解决方案。
鉴于此,本文从高级驾驶辅助系统和无人驾驶车辆对路面湿滑状态检测的实际需求出发,研究干燥、潮湿、积水和积水淹没 4种沥青路面识别技术和路面积水区域分割技术。针对路面湿滑状态识别和积水区域分割问题,结合迁移学习的路面湿滑状态识别方法和全分辨率残差网络(Full-Resolution Residual Network, FRRN)的路面积水区域分割方法,设计一种路面湿滑状态检测系统。
1 路面湿滑状态识别与分割网络
1.1 路面湿滑状态识别模型
2015年,Christian团队基于Google Inception Net结构设计出第三代分类器 Inception V3。Inception V3是Google Inception Net系列网络的典型代表,能够较好地平衡网络宽度和深度,拟合更复杂的特征输入,提高网络识别准确率。鉴于此,本文采用Inception V3创建路面湿滑状态识别模型。
本文建立一个基于 Inception V3的迁移学习模型进行路面湿滑状态识别。具体过程如图 1所示。首先,通过迁移学习方法将基于ImageNet数据集训练的 Inception V3网络权重参数作为新建网络的初始权重,将Inception V3在ImageNet数据集上学习到的特征层迁移到目标数据集,提取不同状态路面的颜色、纹理和边缘特征。然后,连接新建的顶层网络(全连接层和 Softmax分类器),建立基于迁移学习的路面湿滑状态识别模型。最后,在路面数据集上进行训练,使顶层网络适用于干燥、潮湿、积水和积水淹没状态路面的识别任务。
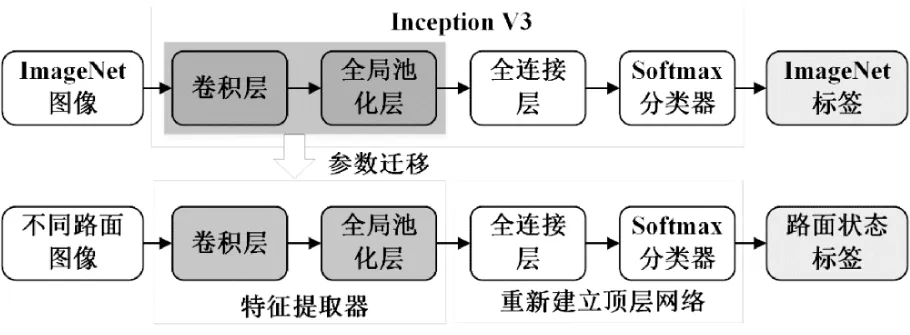
图1 基于Inception V3的路面湿滑状态识别流程
1.2 路面积水区域分割模型
本文采用FRRN创建路面积水区域分割模型。FRRN使用残差流和池化流获取多尺度的特征信息和高精度的位置信息,在保持出色识别性能的基础上提高定位精度。残差流保持完整的图像分辨率,以全分辨率处理特征图实现精准边界分割;池化流由一系列池化和上采样操作组成,获取上下文细节信息实现出色的识别效果。全分辨率残差单元组(Full-Resolution Residual Units, FRRUs)将以上残差流和池化流相连接,使网络能够同时获得低层和高层特征。FRRN在没有预训练模型权重的情况下也能在场景分割中显示较强的边界分割优势。
2 基于嵌入式的路面湿滑状态检测系统开发
2.1 检测系统总体设计
路面湿滑状态检测系统的功能主要包含路面湿滑状态识别和积水区域分割,系统设计方案如图2所示。通过USB相机采集路面图像作为系统的输入,通过由基于迁移学习的Inception V3积水状态识别模型组成的路面湿滑状态识别模块,识别路面状态,包括:干燥、潮湿、积水和积水淹没。当系统检测到干燥或潮湿路面时,不进行预警;当检测结果为积水路面时,进一步通过由基于 FRRN的积水区域分割模型组成的积水区域分割模块,获取路面积水分布信息;当系统检测到淹没路面时,不进行积水分割,只进行系统预警,报告此时路面状态为积水淹没。路面湿滑状态与积水分布区域显示在显示器上。系统检测的积水区域位置信息和积水淹没道路的状态信息可被发送给车辆和驾驶员,作为驾驶参考依据。

图2 路面湿滑状态检测系统总体设计
2.2 硬件系统
本文以ARM+GPU的嵌入式处理器为基础,搭建用于路面湿滑状态检测的嵌入式系统。系统硬件架构如图3所示,包含移动蓄电池、逆变器、电源适配器、采集路面图像数据的USB相机、处理图像信息的Jetson TX2嵌入式开发板、显示检测结果的显示器。Jetson TX2通过逆变器和电源适配器与移动蓄电池连接获取电源。USB相机采集视频流数据,通过相机内置的视频编码组件将视频流处理成合适的数据传输到Jetson TX2。Jetson TX2通过CPU对输入数据进行简单处理,然后采用GPU模块加速图像处理过程,包括图像识别和分割。显示器通过HDMI接口与Jetson TX2连接,显示系统的检测结果。通过与开发板连接的外置键盘和鼠标完成系统操控。

图3 路面湿滑状态检测硬件系统
2.3 软件系统
软件系统框架如图 4所示,包含参数初始化与模型加载、路面湿滑状态识别、路面积水区域分割、检测结果显示与保存四部分。首先,进行参数初始化,包括TensorFlow、Keras等依赖包的导入,路面湿滑状态识别模型权重文件和积水区域分割模型权重文件的加载。然后,对图像进行预处理并识别路面湿滑状态,当且仅当检测到积水路面时,启动积水区域分割模块对路面积水区域进行分割。最后,将检测结果显示在显示器上,并完成保存。
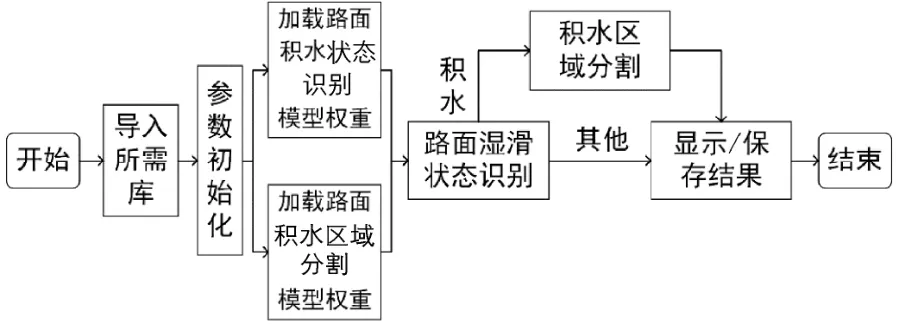
图4 路面湿滑状态检测软件系统
2.4 系统搭建
为了验证路面湿滑状态检测系统在实际应用中的有效性和可靠性,搭建检测设备,进行多种天气条件下路面湿滑状态检测试验。试验设备搭建如图5所示。蓄电池通过连接逆变器和电源适配器为Jetson TX2开发板提供电源。Jetson TX2分别与USB相机以及显示器连接。其中,USB相机通过三脚架固定,相机高度为1 400 mm~1 480 mm,拍摄角度与水平方向成 37°~45°,通过调整相机高度以及拍摄角度使成像区域仅覆盖道路。
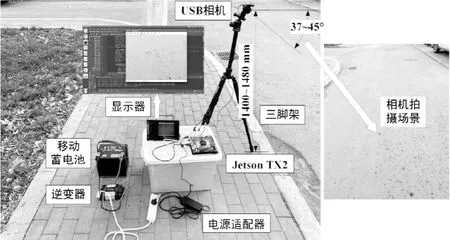
图5 路面湿滑状态检测试验场景
3 路面湿滑状态检测系统试验结果
3.1 路面湿滑状态识别结果
表1以混淆矩阵的形式,给出了路面湿滑状态检测系统对 4种路面湿滑状态的分类结果。如表1所示,检测的路面图像样本总数为1 816张,分类正确的样本数为 1 617张,故分类准确率为89.04%。

表1 路面湿滑状态分类混淆矩阵
3.2 路面积水区域分割结果
路面湿滑状态检测系统对积水路面的检测试验分为三个场景:晴好天气,阴天,雨天。将USB相机采集到的图像尺寸裁剪为320×320,经识别模型确定当前输入图像为积水路面图像,经分割模型得到积水区域分割图像。部分路面积水区域分割结果如图6所示,第1列图像是积水状态识别结果,第2、3列图像分别是积水区域分割结果和积水区域真实标签。图 6(a)、6(b)、6(c)分别表示在晴好天气、阴天、雨天条件下,路面湿滑状态检测系统对积水路面的识别和对其积水区域的分割结果。
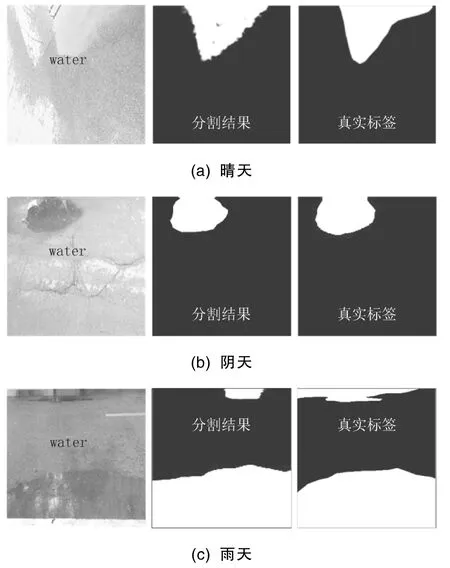
图6 路面积水区域分割结果
4 结论
本文从高级驾驶辅助系统和无人驾驶车辆对路面湿滑状态检测的实际需求出发,研究干燥、潮湿、积水和积水淹没 4种沥青路面识别技术和路面积水区域分割技术。针对不同气候环境下沥青路面湿滑状态识别问题,提出一种基于迁移学习的路面积水状态识别方法。针对路面积水区域分割问题,基于 FRRN卷积神经网络,完成对路面积水区域的分割。此外,设计了一种基于Jetson TX2嵌入式平台的路面湿滑状态检测系统,在实际场景中系统对路面湿滑状态识别准确率达到了89.04%,且能有效分割出路面积水区域,验证了系统识别准确性、分割精度和时效性。
