基于毫米波雷达的汽车开门防撞系统设计
2022-04-02费文玉左付山赵风财李明桃
费文玉,左付山,赵风财,张 敏,张 鹏,李明桃
(南京林业大学 汽车与交通工程学院,江苏 南京 210037)
当车辆靠边停车后,车内乘客由于视野盲区等因素无法准确判断车辆后方的危险情况,盲目打开车门后极易与后方驶来的危险物体发生碰撞。有关文献指出,总的交通事故伤残人数中,11.6%是该事故造成的。更严重的是,当后续驶来的机动车无法及时制动时,非常容易碾压受害者并对其造成二次伤害,上述情况的死亡人数在总的死亡人数中占比大约为5.4%。
目前,国内一部分技术思路只设计了报警装置,而没有过多地设计紧急制动装置。考虑实际情况,该类事故一般发生在时间较短的情况下,事故双方来不及做出躲避反应。所以,仅有报警装置无法尽可能地保证安全,还需要设计紧急制动装置来强制避免事故的发生。另一部分技术思路设计了锁止门锁的紧急制动方式,利用传感器探测到危险时,车内乘客便无法将车门打开。实际生活中,高峰时段的路况十分复杂多变,来往的车流密集,此时,上述思路有可能造成车门始终无法打开的尴尬情形。即使在加装了声光报警装置后,由于吵闹的环境、不良的天气,快速通过的电动车、行人等,也很难在短时间内理解清楚车内乘客的下车意图。车内乘客如果盲目按下紧急按钮强行将车门打开或从车门虚掩的状态下打开车门,上述思路便失去了保护功能,该事故依旧会发生。国外文献大多分析了该事故原因和建立了事故数学模型,一些车企例如奥迪公司设计了防撞系统,但成本相对较高。因此,开发一种适用多场景的简易汽车开门防撞系统十分重要。
1 汽车开门防撞系统设计总思路
本文总结了已有思路的弊端,创新性地提出在车内乘客打开车门过程中实时探测危险并制动车门的思路。
汽车开门防撞系统的结构图和工作流程图如图1和图2所示,其工作过程简述如下:当车内乘客开启车门时,安装在车门侧面锁扣附近的毫米波雷达立即向车门后方探测。如果在车门打开一定的角度内没有发现危险物体,则本系统不影响车门的正常打开;如果雷达探测到危险物体,则制动装置立即制动车门,使车门不能继续开启。同时,声光报警装置提醒车内与车外人员。本系统设计与已有设计的核心不同在于,本系统采取过程防护的思想,使得车门可以打开,并实现开门中的连续保护。
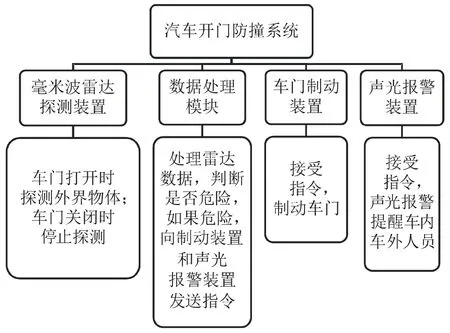
图1 汽车开门防撞系统结构图
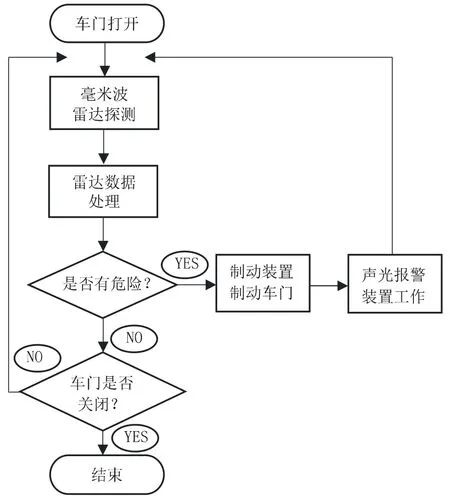
图2 汽车开门防撞系统工作流程图
本系统核心在于毫米波雷达探测装置的探测功能、数据处理模块的数据处理功能和车门制动装置的制动功能,下面分别介绍其工作原理。
2 汽车开门防撞系统探测功能设计
根据参考文献[1],用于探测的传感器有红外线传感器、毫米波雷达、激光雷达、视觉传感器、超声波传感器等。红外线传感器受温度影响较大,激光雷达和视觉传感器受干湿度影响较大,且成本较高,超声波传感器探测距离较近。相较之下,毫米波雷达的各项性能良好且成本适中,故本文选择此类传感器来实现汽车开门防撞系统的探测功能。
毫米波雷达可以实现测距、测速、测角等基本功能。例如,雷达甲与目标乙之间的距离可以利用测量得到的雷达电磁波往返所需的时间得到,如式(1)所示。

其中,为光速。
测速利用的原理主要是多普勒效应,该原理是指,当发射装置和接收装置之间有相对的位移时,接收到的回波信号的频率将改变。多普勒频率如式(2)所示,利用该式可求出目标径向速度。

测角的原理本文介绍相位法测角,假设在方位有一个物体,物体的回波信号与发射信号几乎平行。两接收天线收到的回波信号由于存在波程差Δ而产生了一个相位差为,由此可得式(3)。

其中,为雷达的波长,为两天线基线间长度。利用相位计的比相,可以测得其相位差,就可以确定物体方向。
本文中的毫米波雷达安装在车门侧面锁扣附近,如图 3所示。这样设计的好处是:车门刚刚打开微小的角度,雷达开始实时探测外界物体,数据处理模块实时判断危险情况,制动装置可以随时制动车门,避免严重事故的发生。

图3 毫米波雷达安装位置图
3 汽车开门防撞系统数据处理模型建立与实现
波雷达探测到外界物体的回波信号后,经过一系列信号处理算法,得到距离、速度等信息。这些信号处理算法的作用可以概括为抑制背景和干扰物的杂波,增强感兴趣目标的信号强度,从而提高探测精度。本文中,感兴趣目标指的是车道上运动中的可能造成危险的物体。常见的信号处理算法流程为:MTI(动目标显示,Moving Target Indication)—MTD(动目标检测,Moving Target Detection)—恒虚警检测—聚类。MTI和MTD算法的主要作用是抑制外界静止物体和干扰物的杂波,恒虚警检测的目的是减小漏警和虚警的概率,聚类算法可以使得同属于一个目标的数据点集中起来,从而利用雷达点云数据实现对多目标的探测和追踪,如图4所示。
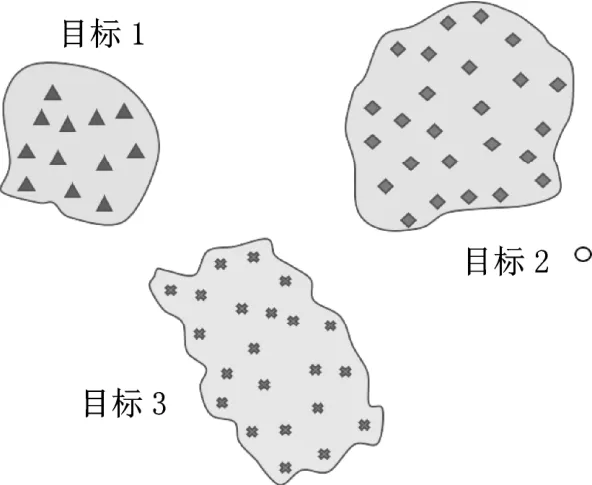
图4 信号处理实现多目标探测演示图
当雷达采集到多个外界物体的距离、速度等信息后,汽车开门防撞系统应及时处理采集到的数据,判断外界物体是否会对车门造成威胁,以此作为采取制动措施的依据。由于道路上物体的运动涉及到动力学、天气状况等多重因素的影响,其机理十分复杂,所以本文采用极限学习机模型来判断外界物体危险等级。

根据式(5)计算,式中 是矩阵的Moore-Penrose增广逆,是训练样本标签t排列而成的矩阵。

在上述计算过程完成后,根据式(6)可以计算测试样本的标签。

本文选取距离、角度、速度、速度变化率、角度变化率这五个特征值作为输入值,选取危险等级作为输出值,1为安全 2为危险。采用MATLAB软件,导入模拟数据进行训练。预测结果如图 5所示,在少量预测样本的情况下,测试结果可以达到100%的准确率。
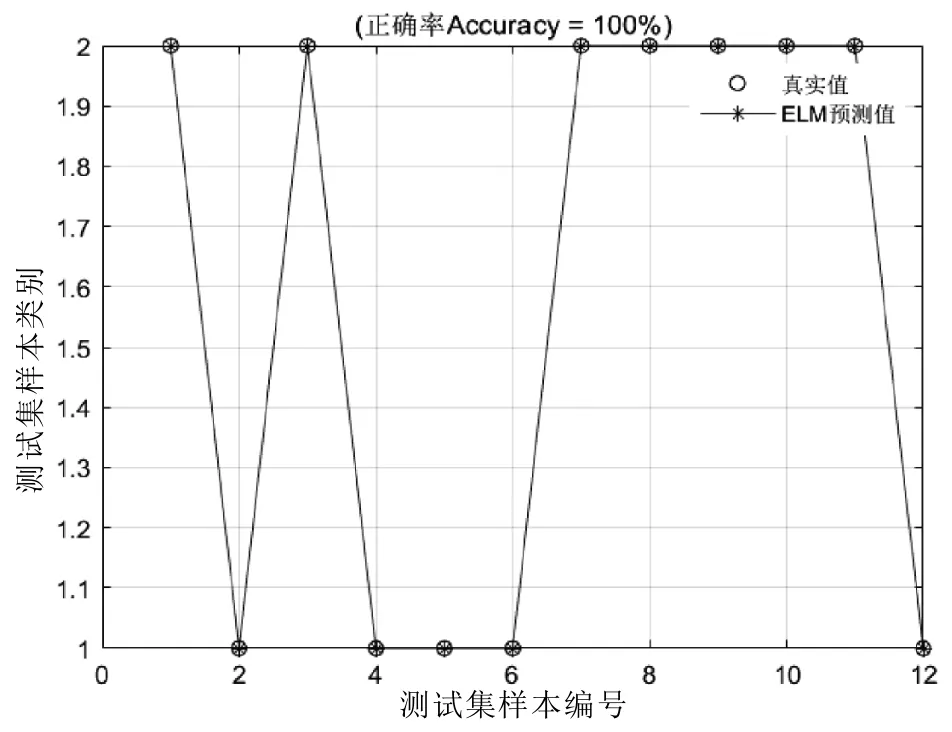
图5 模拟预测样本测试结果图
4 汽车开门防撞系统制动功能设计
为了实现汽车开门防撞系统的制动功能,本文设计了限位器制动装置,如图6—图8所示。
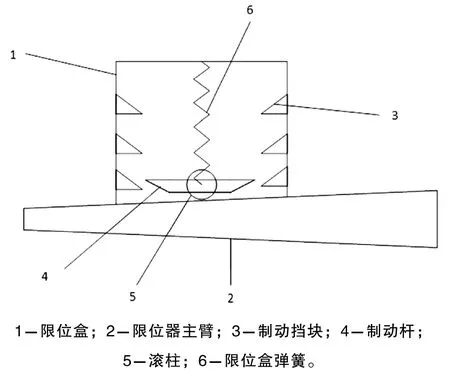
图6 限位器制动装置图
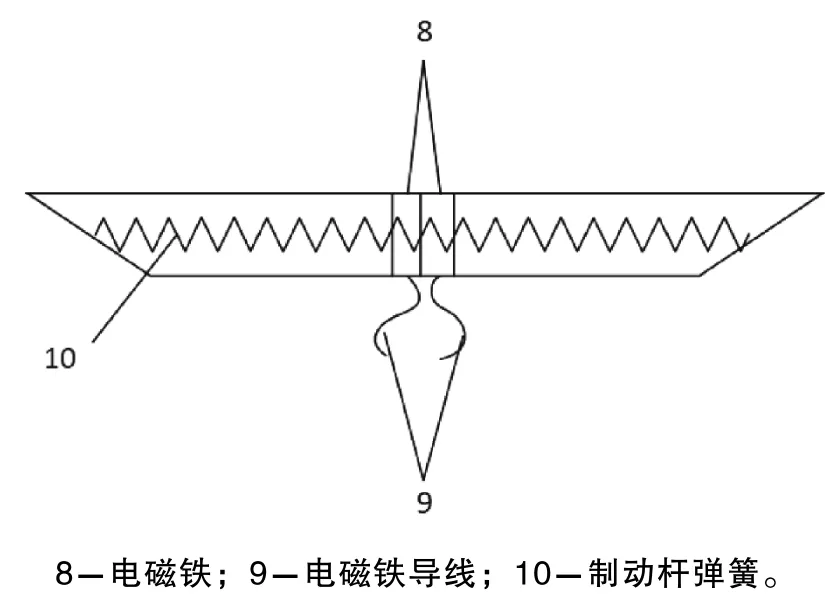
图7 制动杆压缩状态图
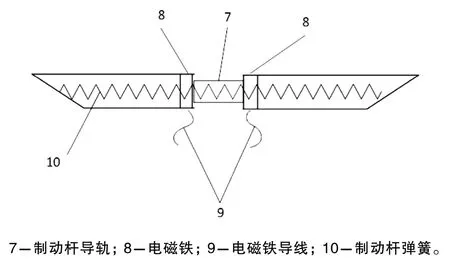
图8 制动杆伸长状态图
根据文献[12-14],目前国家标准和行业标准尚未对限位器作出充分描述。从部分车型的限位器参数可以看出,限位器一级限位凹槽处近似对应车门开启一半位置。并且根据限位器主臂的设计参数,一级限位凹槽之前滚柱在限位器主臂上的移动可以看作连续上坡。
限位盒安装在限位器主臂上,当车门逐渐开启时,限位盒沿限位器主臂轴向相对移动。限位器主臂安装在车门与车体之间,其形状参数决定了限位级数与位置。制动挡块为楔形挡块,安装在限位盒侧壁上。制动杆两端制成与制动挡块配合的楔形,安装在滚柱上,可以随着滚柱移动。当制动杆处于收缩状态时,其长度不影响滚柱在限位盒内的移动;当制动杆处于伸长状态时,由于其两端的楔形形状使制动杆无法向上移动,但可以向下移动。滚柱与限位器主臂直接接触,沿限位器主臂轴线滚动并在限位盒内沿垂直限位器主臂轴线方向移动。限位盒弹簧连接滚柱与限位盒顶部。制动杆导轨位于制动杆内部,使得制动杆分离时沿轴向移动。电磁铁位于制动杆中部,左右分离部分各一个,通电时具有磁性,断电时不具有磁性。电磁铁导线连接电磁铁,用于给电磁铁供电。制动杆弹簧位于制动杆内部,连接制动杆两端,在制动杆收缩状态下保持压缩。
车门逐渐开启时,限位盒沿限位器主臂轴向相对移动,滚柱与制动杆在限位盒内部向上移动。电磁铁导线通电使电磁铁具有磁性,从而使制动杆保持收缩状态,不影响滚柱的移动。当电磁铁导线经历断电又通电的过程后,电磁铁由于导线断电而失去磁性,使制动杆在制动杆弹簧的弹性力作用下沿制动杆导轨伸长。制动杆卡在制动挡块下,使滚轮无法继续向上移动,从而使车门无法继续开启。并且,此时由于制动杆处于伸长状态使电磁铁无法吸合。此时关闭车门,滚柱连同制动杆向下移动,由于制动杆两端与制动挡块的楔形配合,使制动杆压缩,其长度使电磁铁可以吸合,制动杆恢复收缩状态,不影响滚柱在限位盒内的移动。
通过上述工作流程,限位器制动装置可以在毫米波雷达探测到危险物体时及时锁止车门,避免严重事故的发生。限位器制动装置的安装位置如图 9所示,在限位器处设计制动装置而不是锁止门锁的好处是让车门打开微小角度,使得车外人员可以理解车内乘客的下车意图。采用了过程防护的思路,在开门过程中具有连续保护功能。当车门从虚掩状态下打开时,本文设计的制动装置依旧可以起到保护作用,而已有思路的紧急制动功能在车门打开后无法起作用。

图9 限位器制动装置安装位置图
5 实物模型验证
硬件部分,本文购买的雷达型号为纳雷科技SP25毫米波雷达,该雷达实物连接图如图 10所示。雷达由5 V电源驱动,通过雷达信号转USB连接线与计算机相连。
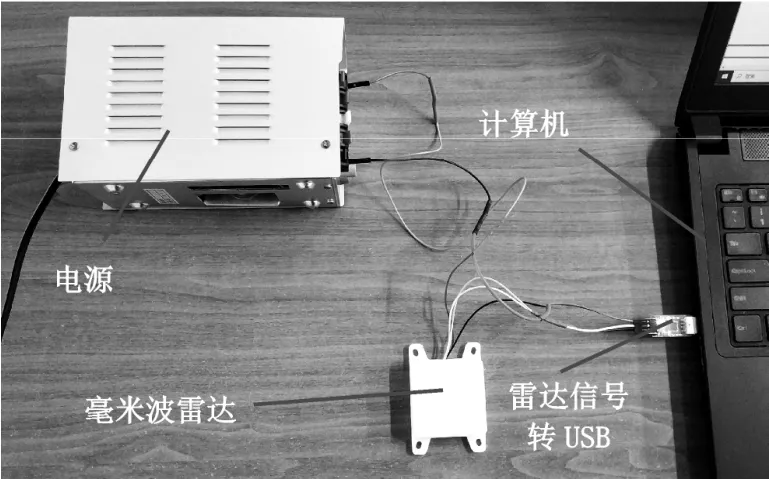
图10 雷达实物连接图
软件部分,通过MATLAB R2018b软件实现极限学习机算法,再用 LabVIEW 2018软件搭建汽车开门防撞系统,实现雷达串口通信、雷达数据解析、调用MATLAB极限学习机算法、输出危险判断结果等功能,汽车开门防撞系统主界面和程序框图分别如图11和图12所示。
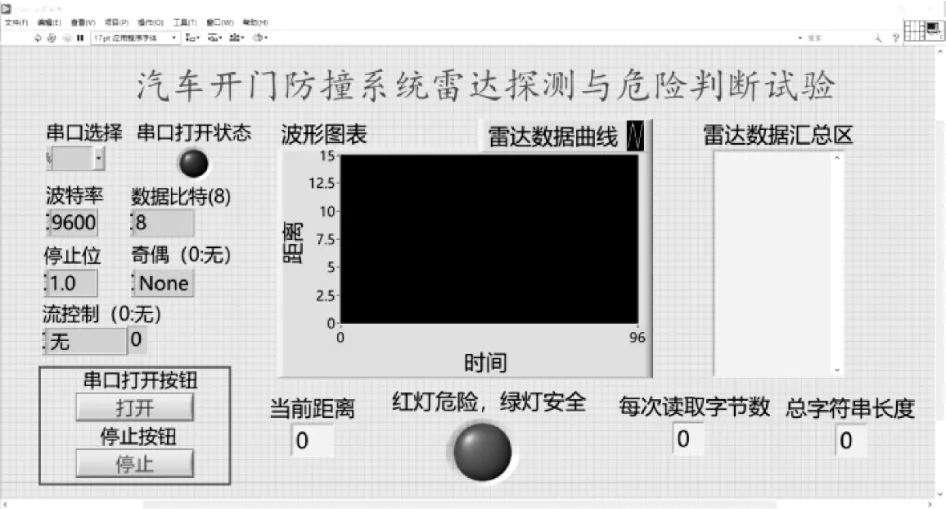
图11 汽车开门防撞系统主界面图
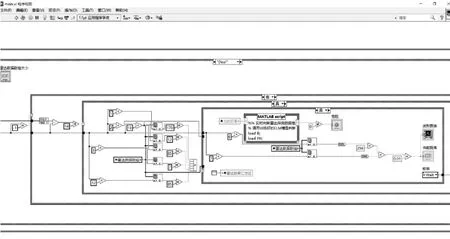
图12 汽车开门防撞系统程序框图
在采集训练算法的标准数据时,理想情况下,可以用真实试验或仿真试验的结果来判断数据是否危险。即如果发生碰撞,就是危险数据,反之则是安全数据。考虑到试验的危险性,在主要采集速度和距离的情况下,可以选用最小安全距离模型来进行危险判断。当前速度对应的安全距离如果小于当前实际距离,就是安全数据,反之则是危险数据,具体公式如式(7)所示。

式中,为最小安全车距,单位为 m;为自车速度,单位为m/s;为前车速度,单位为m/s;为驾驶员反应时间,通常取0.4 s;为制动器延迟时间,通常取 0.6 s;为增加到最大减速度所需时间,通常取0.1 s~0.2 s;为车辆最大减速度,本文取7.5 m/s。
根据式(7)判断模拟数据是否危险,并打上标签,作为极限学习机算法的初始数据集。试验开始时,电动车离雷达距离较远,为7.4 m,如图13所示。此时系统判断为安全,系统界面如图14所示。随着电动车逐渐靠近,系统的探测和危险判断准确且灵敏。当电动车距离雷达较近时,此时距离为2.36 m,如图15所示。这时系统判断为危险,系统界面如图16所示。

图13 电动车距离较远时实拍图
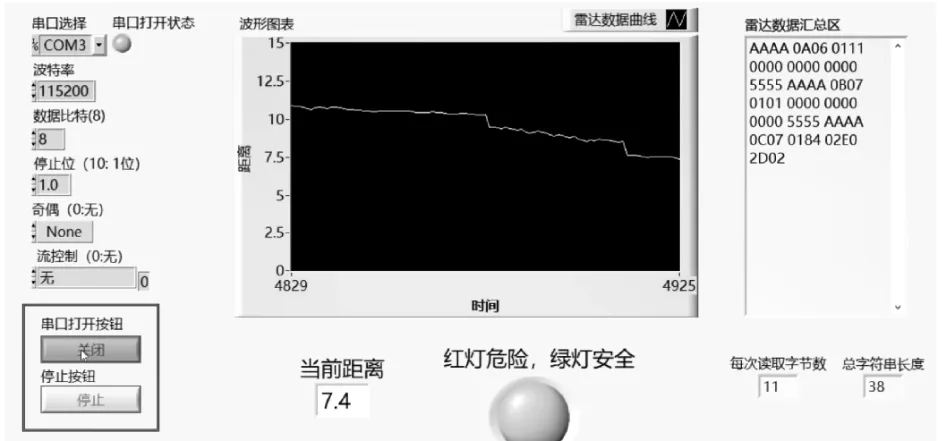
图14 电动车距离较远时系统界面图

图15 电动车距离较近时实拍图
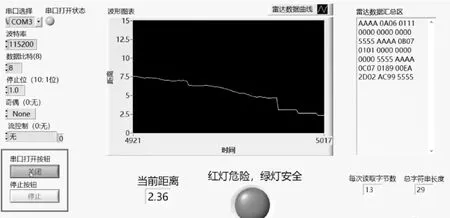
图16 电动车距离较近时系统界面图
本试验证明实物模型与算法的衔接可靠,汽车开门防撞系统可以准确且灵敏地实现雷达探测、数据处理、危险判断的各个流程,从而正常工作。由于试验条件限制,本文采用的SP25雷达只能跟踪一个目标,只能采集距离、速度数据。但是,从测试结果可以看出,在本试验条件下该雷达较完美地实现了目标。
6 结论
本文研究的创新之处在于采取过程防护的思想,车门开启全过程都具有保护功能。使得车门可以打开微小角度,便于车外人员理解车内乘客的下车意图。本文采用极限学习机模型处理数据,避开复杂的动力学原理,判断外界物体造成危险的等级。本文的研究在交通安全领域具有一定意义,可应用在汽车安全防护系统和智能驾驶系统中,对降低“开门杀”事故发生概率、保障人民的生命财产安全具有一定作用。
