基于倾斜摄影测量的三维模型在城市规划中的应用
2022-03-21赵斓
赵 斓
(诸城市城乡规划设计研究院,山东 诸城 262200)
随着城市高层建筑物数量不断增加,传统的二维地形图、交通图不能够满足当前城市规划建设的需求。计算机技术和测绘地理信息技术高速发展,无人机倾斜摄影测量三维建模技术越来越成熟,应用越来越广泛。与传统人工贴纹理建模方式相比,无人机倾斜摄影测量具有自动化程度高、经济成本低、模型精度高等特点[1]。
城市规划方案的制定过程中,建立城市宏观三维模型对还原现实实际情况,展示城市地貌、地物等具有巨大优势,可以在规划设计过程中提供数据支持,在规划成果中为项目成果汇报提供三维展示,辅助相关政府部门开展规划决策。
我国倾斜摄影测量技术起步较晚但发展迅速,国内倾斜摄影测量系统中,有北京四维的SWDC-5、中测新图研发的TOPDC-5系统以及中科院与上海航遥共同研发的AMC580多视角航测系统发展较好[2],为城市宏观三维模型的建立提供技术保障。
1 倾斜摄影测量原理及技术路线
1.1 无人机倾斜摄影测量系统
无人机倾斜摄影测量系统是近几年发展较快的新兴测绘技术手段,其系统主要分为飞行控制系统、地面站系统以及航拍摄像系统三部分[3]。
无人机摄影测量平台组成如图1所示。

图1 无人机摄影测量平台组成
倾斜摄影测量系统在飞行平台上搭载1个垂直相机、4个倾斜角度的相机,获取被测目标的多个方位角纹理数据。在无人机上搭载的POS系统可以记录拍摄瞬间无人机的坐标与姿态数据,使用软件解算,获取拍摄数据的外方位元素。地面控制站可以设置无人机的航线、航高以及航向,实时控制无人机飞行。
1.2 航摄影像的获取
城市三维模型的品质受拍摄影像的质量影响。无人机航空摄影测量时,应做好航线规划,使其满足各项指标的限定,了解计算机的配置及其能够处理的图像数量。根据无人机倾斜摄影指标及工作经验对测区进行分区,应保持区域长宽比适宜[4]。无人机倾斜摄影的航向重叠率一般为80%,旁向重叠率为75%,需要保证数据不出现空洞或遗漏,保持航线边缘数据的精度与完整度。应选择晴朗无风的天气进行测设,确保测区周边无较强信号。
2 倾斜摄影测量关键技术路线
2.1 技术路线设计
航线设计后,利用CORS系统进行少量控制点的布设,控制点可以选在较显眼的水泥地面的十字路口或平地区域。无人机获取多视角影像后,需要对获取的相片进行预处理,对像片的质量进行检查。出现不合格的相片时,需要进行补测,直至相片全部合格。根据外业控制点数据进行空三加密,生成DEM数据和DOM数据。
无人机摄影测量数据处理流程如图2所示。
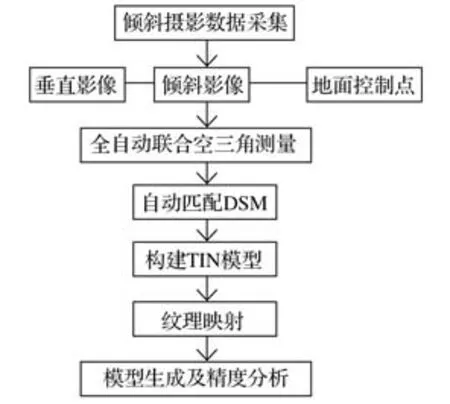
图2 无人机摄影测量数据处理流程
2.2 空三加密
为了确保倾斜摄影测量数据的精度,需要进行空三测量工作,将测区内的少量控制点数据加入摄影测量数据解算,控制点应尽量选择航向和旁向航线的重叠位置。将已知大地坐标和像点坐标的控制点使用光束法平差方法进行平差计算,解算每张相片的加密点坐标,建立全测区的统一误差方程,进行平差工作,计算每张相片的外方位元素以及加密点的实际大地坐标数据[5]。
2.3 三维建模
实景三维建模过程中,将采集的航飞遥感影像、相机数据以及空三解算数据进行区域平差,进行多规角影像匹配,构建TIN格网,创建白膜。倾斜摄影测量获取的三维模型是网络面模型,TIN数据具有较好的延展性,对地物进行展示时具有很好的效果。
建筑物TIN网的构建如图3所示。

图3 建筑物TIN网的构建
三维模型的表述离不开建筑物纹理映射,需要将倾斜摄影获取的建筑物照片贴合至白膜表面。传统的建模方式中,人工使用照相机获取建筑物外表面的相片,采用手工贴合,误差较大;使用无人机处理软件时,将二维建筑物表面相片进行映射,建立相片二维平面坐标与三维白膜间的数学关系,将二维相片的灰度值直接解算至三维立体模型,使其在视觉效果上与实际建筑物外观一致。
纹理映射如图4所示。

图4 纹理映射
3 倾斜摄影测量在城市规划中的应用
3.1 为规划编制提供基础数据
城市的宏观规划离不开现状数据支撑。规划时,采用三维数据能够更加直观地展示城市高层建筑的全貌,倾斜摄影测量技术能够快速高效地获取大范围城市三维数据,直观真实地展现城市全貌,包括建筑物的位置信息、高程信息、色彩信息以及外观信息等,为城市的宏观规划研究提供基础数据。
3.2 为重大工程提供数据保障
部分重点项目工程前期需要对规划设计方案进行对比参考。大型滑雪场常在山地中建设,有必要对地形的利用进行分析。与传统建模方式相比,无人机倾斜摄影测量建模的效率更高、效果更好,对山体的表达更完善和真实直观,可以采用三维建模的方式进行重点项目规划设计。
3.3 为规划设计方案提供三维依据
传统的规划设计方案汇报常采用二维效果图进行展示汇报。二维设计图纸效果不错时,将设计方案放在真实的三维实景中,可能出现高度、形状甚至色彩与周边已建成环境不搭配的现象。采用三维模型建立规划场景时可以同时建立周边环境场景,提供真实的规划场景,通过平台进行多角度、全方位展示,提高设计方案的通过率。
4 实例应用
4.1 无人机影像获取
试验区选取某市开发区学校周边区域,其地势较平坦,平均海拔12~30 m,建筑物样式较多,区域范围为105°11′34.32″E~105°12′54.26″E,32°34′23.13″N~32°35′43.74″N。分析试验区的航飞影响因素,主要包括飞行航线、航高、航向及旁向重叠率设计,航飞试验时应充分考虑天气的影响,确保飞行能够顺利开展。
飞行前需要对测区进行实地勘测,研究测区的环境并选取无人机起降落点,根据相关航空摄影测量技术规程设定飞行参数。根据测图比例尺确定地面分辨率,计算航高:

式中:s——地面分辨率(ppi);α——像元长度;H——相对航高(m);f——相机的焦距长度(mm)。
为了保证倾斜摄影获取的影像质量,根据相关航空摄影测量技术规程,考虑测区内高层建筑物遮挡,航向重叠率和旁向重叠率均设置为80%。根据测区范围大小,设置航线为矩形区域。航线设定后,选择无风晴朗天气飞行,飞行相机选用索尼ILCE-7R。
设置相关测量参数,测区大小47 km2、区域最低高程12 m、区域最高高程30 m、基准高程26 m、相对飞行高度500 m、地面像元大小4.75 μm、地面分辨率0.673 m、航向重叠率80%、旁向重叠率80%、焦距长度35.302 mm。
4.2 三维模型建立
将获取的倾斜影像结合飞行过程中采集的POS数据导入Smart 3D软件,进行解算,构建三维模型。解算外方位元素,利用基于匹配算法计算特征点与同名点,采用光束法联合平差的方式构建三维高密度云模型,采用纹理映射的方法将倾斜摄影获取的相片贴合至三维模型,实现实景三维的构建。
局部三维模型浏览图如图5所示。

图5 局部三维模型浏览图
4.3 精度评价
城市规划三维建模工作的要求严格,其精度直接影响后期规划成果及评审结果,应对三维建模的成果进行精度检测。为了保证测绘成果的真实可靠性,选取三维模型的界址点坐标与实测坐标进行对比,对无人机测绘成果进行精度检测,评价方法选用地籍测量相关技术标准《国家基本比例尺地形图更新规范》(GB/T 14268—2008)。
计算三维模型测量精度限差,三维模型选取点对临近控制点误差限差中,中误差为±5 cm、允许误差为±10 cm,三维模型选取点间限差为±10 cm。
测区内选取较明显的点作为检验的控制点,利用CORS系统测量其坐标作为真值,与三维模型中同名点的坐标进行对比,计算点位坐标的误差值:

式中:d——某一方向的中误差;△——某一方向的真误差值;n——点的数量。计算平面误差ds:

精度检测中,选取230个硬化地面拐角以及房屋拐角作为精度检测点,使用CORS及全站仪进行坐标观测,基准点从控制点引出,采用两次观测取平均值的方法计算检测点坐标。利用激光测距仪和卷尺对地物长度及距离进行量测,与三维模型的边长进行对比,平面坐标中误差为0.043 2 m,高程中误差为0.024 5 m,相对精度为0.042 1 m,满足精度要求。
5 结语
传统的二维平面地形图、交通图不能够满足当前城市规划的需求,基于无人机倾斜摄影测量的三维建模技术具有建模速度快、成本低以及精度满足规划工作需求等特点,在城市规划中应用越来越广。文章阐述无人机倾斜摄影测量三维建模技术,介绍主要技术流程,为试点区域建设三维模型。结果表明,基于无人机倾斜摄影测量技术建立三维模型在城市规划中应用具有可行性。
