植保无人飞机施药技术研究进展*
2022-02-25陈盼阳秦维彩王宝坤
陈盼阳,秦维彩,王宝坤
(1.南京工程学院,南京市,211167;2.农业农村部南京农业机械化研究所,南京市,201114)
0 引言
由于人工喷洒农药效率低下且过量的农药对环境污染巨大,植保无人飞机应时而生。植保无人飞机是无人飞机应用在农业上,起到植物保护作用的无人驾驶飞行器。我国植保无人飞机在2020年其保有量已达11万台,作业面积6.67×107hm2·次[1]。
到进入2021年,随着5G技术、人工智能等的进一步利好,植保无人飞机还将迈入高速增长阶段[2]。与传统的施药方法相比,航空施药可以快速应对大面积病虫害的爆发,不受地形限制,不需要预留的机耕道,减少对土地的压实。此外植保无人飞机的飞控系统可控制喷药姿态的调整。航路规划会影响雾滴覆盖率和沉降均匀性。旋翼下洗气流一定程度上会抑制雾滴漂移,并且会影响雾滴的穿透性。田间植保技术和安全施药技术规范有助于航空植保事业的发展。
因此本文从飞控技术、航路规划、旋翼下洗气流的研究、田间植保技术和安全施药技术规范对国内外植保无人飞机技术发展现状进行总结,分析发展中面临的问题,阐述了植保无人飞机技术几大发展趋势。
1 植保无人飞机飞控技术
1.1 飞控技术
飞控是无人飞机的“大脑”。从硬件上看,飞控系统包括主单元、惯性单元、无线通信模块、数据采集模块、执行器驱动模块等。飞控流程和构成如图1、图2所示。
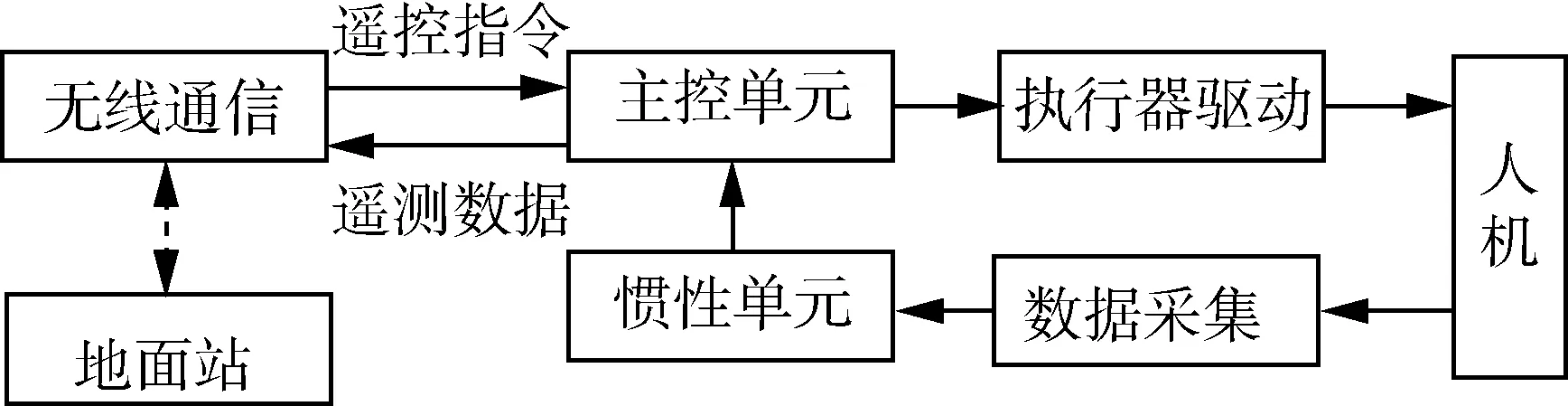
图1 飞控系统流程图

图2 飞控软件组成模块
无人飞机软件架构是通过无线电控制技术发展起来的,一个完整的飞控软件组成模块包括:传感器模块、通信模块、控制输入模块等等。飞控软件设计是搭建合理软件流程,使得各个功能模块能够协调有效的工作。
1.2 常用的飞控算法
植保无人飞机的“灵魂”是飞控算法,因此开展飞控算法的研究对平稳飞行、航路规划、精准施药等方面都具有重大的意义[3]。表1总结了三大飞控算法的工作原理,为植保无人飞机飞行控制算法研究的开展提供重要参考。

表1 三大飞控算法及工作原理
无人飞机飞控系统的算法多种多样,而捷联式惯性导航系统算法的导航方法是利用载体上的惯性元件,去测量飞行器的角运动和线运动信息。将惯性元件直接装在载体上,会使得坐标变换中计算量大,对元件要求较高[4]。此外依据应用场景的不同,捷联惯性导航可分为4个级别,如表2所示[5]。

表2 各导航技术性能对比
欧美发达国家的光纤陀螺捷联惯性导航系统,已经发展到实际应用的阶段,并且发展方向是向着高精度和高可靠性。我国光纤陀螺的研制水平在可靠性、精度等方面还有待提高,光纤陀螺捷联系统在植保无人飞机施药上的应用处于起步阶段。
王养柱等[6]对三回路捷联惯导算法进行了仿真研究。运动体从起始点北纬40°、东经116°到目标点北纬41°、东经117°,最大飞行高度约7 106 m,是大平飞速度为300 m/s,共飞行约500 s。试验结果表明,姿态角误差:500 s内最大航向角绝对误差大约为-12×10-3°、俯仰角绝对误差为-8×10-3°、横滚角绝对误差为12×10-3°。位置误差:500 s内最大纬度绝对误差大约为5×10-3°、经度绝对误差为-6×10-3°、高度绝对误差为-5 m。
卡尔曼滤波算法是卡尔曼等人提出的一种递推滤波算法[7]。此算法采用信号与噪声的状态空间模型,对状态变量的估计采用前一时刻地估计值和现时刻的观测值来更新,求出现时刻的估计值。卡尔曼滤波便于计算机编程实现,其广泛应用在导航、通信与控制等众多领域当中。
毛红瑛等[8]为了解决惯导的累计误差问题,导航信息由MEMS AHRS/GNSS组合导航系统来计算。试验结果表明,扩展卡尔曼滤波算法的姿态角与参考角度非常相近,在试验过程中,横滚角的平均误差为1.188 3°,俯仰角的平均误差为1.407 5°,偏航角的平均误差为4.033 7°。此外由经纬度误差的对比可知,没有遮挡GPS信号时,其最大误差是5 m,遮挡GPS信号时,由于用惯性导航来定位,随着时间的增加,误差不断累积,在10 s以内的累积误差最大值为6 m,其最大误差达到了20 m。在国外卡尔曼滤波算法经过几十年的研究和发展,使其广泛应用在航空航天、无人飞机等处理通信信号的领域当中,该算法有广阔的应用前景,有待进一步发展。
当纯惯性导航精度不够时需要使用PID控制算法。PID系统具有适应性强和结构简单优点,且处在环境恶劣情况下依然可靠[9]。利用PID系统在旋翼转速和姿态信息之间建立比例、积分和微分的关系,通过调节各个环节的参数大小,使植保无人飞机的控制达到动态响应快、既不过调、也不欠缺的效果[10]。
刘钢[11]为保证旋翼无人飞机的机身飞行平稳,使用STM32嵌入式系统进行模糊PID算法控制。采用模糊PID控制算法的最大超调量比基本PID控制算法的超调量减少了21%,降低到4%,并且调节的时间减少了11 ms,降低到12 ms,提高了系统的动态响应性能。目前欧美发达国家在PID控制算法的理论研究和产品应用上走在前列。例如,Yokogawa电气、Fuji电气的温度控制器、无人飞机的飞控。它们把模糊逻辑PID控制与标准的PID控制结合在一起来防止超调,取得了显著效果。
1.3 飞控系统
植保无人飞机是通过多种传感器的融合,将此时的飞行姿态的数据传回飞控当中,然后通过飞行控制系统来计算和判断,从而发送新的指令,其动作和飞行姿态的调整最后由执行机构来完成。表3中是目前市场上常用的植保无人飞机飞控系统及其特点。

表3 飞控系统
其中Pixhawk是具有成本低,性能高的系统。其飞控系统是完全开放的,常应用在固定翼和多旋翼上,且与强大功能的地面站Mission Planner(简称MP)搭配使用。Pixhawk飞控的植保无人飞机,其通过一些外部功能模块进行转换来实现信号的接收或控制。Pixhawk飞控实物图如图3。

图3 Pixhawk飞控实物图
为了验证植保无人飞机Pixhawk控制系统的可行性,Yang等[12]搭建了基于Pixhawk飞行控制系统的四旋翼植保无人飞机试验平台,遥控器的SwG开关设置为喷洒开关,在100 m范围内进行了模拟喷雾试验。试验结果表明,在Pixhawk飞控系统在100 m范围内,能成功地分析喷雾开关的状态,并使喷洒系统发出喷洒指令。
同时,喷雾系统还成功的对喷雾进行分析。针对在室内环境下无人飞机的在GPS信号缺失问题,姚光乐等[13]采用pixhawk飞行控制板运行核心控制部分。测试结果表明,无人飞机位置控制节点通过MAVROS获取植保无人飞机当前位置和姿态数据,计算出加速度指令,将加速度指令传递到Pixhawk系统,由姿态控制模块实现植保无人飞机自主起飞和悬停功能。
赵航[14]在pixhawk开源飞控系统的基础上,对多旋翼无人飞机避障飞行控制系统进行研究。试验结果表面,通过对pixhawk飞控系统运行流程、编译流程、rcS、uORB等分析。在AltHold、Loiter飞行模式下,完成了无人飞机在飞行高度和姿态上避障应用的开发。
张金钱等[15]设计一款了以控制器核心为Pixhawk的六旋翼植保无人飞机,为了做到植保无人飞机能够在农田上空稳定的飞行,提出了采用模糊PID控制。试验结果表明,处理器采用模糊PID算法控制植保无人飞机的飞行状态,其响应速度有所提高。
蒋彪[16]为了验证Pixhawk飞控与喷洒系统间串口通信的可行性,选取S550机架搭建小型四旋翼植保无人飞机试验平台。试验结果表明Pixhawk飞控能较好的实现植保无人飞机的飞行控制,且喷洒系统能通过喷药开关实现喷药时水量连续均匀。
2 植保无人飞机航路规划
航路规划是确定无人飞机从初始点到目标点,除障碍物外最佳的路径的问题。航线规划需满足导航、任务、环境信息、安全性等约束的要求[17]。全覆盖航线规划可分为“在线式”和“离线式”,是由Choset[18]提出的。当作业区域周围环境信息已知是“离线式”;当作业区域周围环境信息完全或部分未知的情况下是“在线式”。农业植保无人飞机常用的航线规划方法如表4所示。此外,国内外在多种领域的智能化机械上都应用到全覆盖航线规划。例如,智能化机械应用在海军军事方面,可以实现水下自动航行、布雷和扫雷等任务。国外的Acar等[19]研究出全覆盖式扫雷机器人的感知和航线规划。

表4 航线规划方法
2.1 牛耕往复和内外螺旋作业法
全覆盖航线规划行走的典型方式是牛耕法和内外螺旋法,其覆盖原理如图4所示。其中:L为作业区域纵向长度,M为作业区域横向长度,d为覆盖作业幅宽。
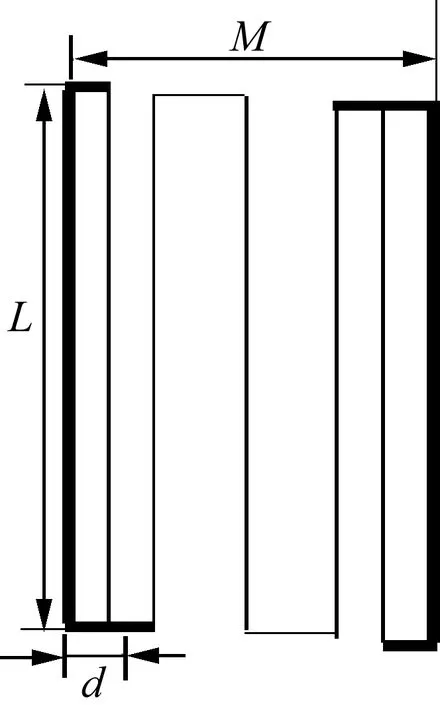
(a)牛耕往复法
图4中,飞行路线来回往复式的称为牛耕法,内外螺旋法的飞行路线是依据目标区域的外轮廓制定飞行路线,逐渐靠近目标区域的中心或外轮廓。采用内外螺旋法时,无人飞机在转弯时需要多次调整航向角,而牛耕法可以保持固定航向角;当作业区域为不规则图形时,内外螺旋法的航线不规则,且转弯次数过多;此外采用内外螺旋法时,由于植保无人飞机在转弯过程并不喷药,会造成目标区域中一部分重复覆盖和遗漏覆盖现象;因此综合考虑多采用牛耕法的作业方式。
Liu等[20]提出了以搜索最短飞行路径为目标的路径规划算法(MOAA算法),该算法基于牛耕往复法,利用射线法避开了多障碍物和凹多边形障碍物区域。仿真试验表明,该算法可以减少总路径长度,优化率可以达到14.2%。徐博等[21]针对植保施药多个作业区域的情况,分析了多种覆盖作业方式的优劣,确定了牛耕法作为无人飞机在单区域内的作业方式。得到了基于遗传算法与TSP旅行商问题的多个区域间作业顺序,仿真结果表明,该规划算法可以有效地实现全局航线的规划,缩短了植保无人飞机的作业距离与区域间调度飞行的距离。武锦龙[22]针对多个作业区域,选择了转弯次数少,喷药覆盖率高的牛耕法。提出了一种基于粒子群算法的全局作业,将多块区域作业路径问题转化为粒子群算法的优化模型。较好找到了植保无人飞机的近似最优路径,进一步提高植保无人飞机喷药作业工作效率。
2.2 栅格法
栅格法是将植保无人飞机的作业区域分成很多个具有二值信息的大小相同或不同的单元格。近年来广泛采用Elfes和Moravec[23]等提出的栅格法,可飞和不可飞单元格是根据其中是否存在障碍物划分。如图5所示,障碍物轮廓用虚线表示,黄色栅格区域为不可飞单元格,与之对应的白色栅格区域为可飞单元格。全覆盖航线规划目前使用最为广泛的是栅格法。

图5 栅格法原理示意图
当使用“在线式”航线规划方法时,单元格划分越大,则精度越低,此时非障碍区域将会被标记成障碍区域。而单元格越小,则精度越高,此时会增大计算量,增加成本。王宇等[24]提出了基于栅格法和引力搜索算法结合的路径规划方法,以最小化非植保工作时间为目的,计算合理的回归点个数和位置。徐利锋等[25]基于栅格法对目标区域进行路径点采样,针对含有障碍物的目标区域,提出了混合粒子群无人机航线算法。该算法的路径点由栅格法来获取,其次路径点的排序由混合粒子群算法来完成,得出一条能够规避障碍物,且对目标区域全覆盖的航线。试验结果表明:所提出的混合粒子群算法,能够应用在含多个障碍物的目标区域,使得航线的转弯次数减少,飞行时的能耗降低。
2.3 梯形分解法
梯形分解法是由Latombe等[26]提出,假设出一条与覆盖方向一致的“割线”,在目标区域内沿着垂直方向进行扫描,目标区域内部的不规则障碍物与“割线”分别呈相离、相切或相交状态,依靠不同的状态,可以将目标区域中的非障碍部分划分成多个子区域,且每个子区域的形状都是梯形。如图6(a)所示,有一块多边形障碍物处于目标区域中,可以采用梯形分解法对区域进行分解。

(a)含障碍物的工作区域
传统梯形分解法使用倾斜角为0或π/2的一条水平或垂直“割线”对目标区域进行分割,其“割线”方向是不变的。因此,Huang提出了“割线”方向可变的“线扫分割法(Line-sweep-based Decompositions)”[27],“线扫分割法”是一个动态比对的过程,其“割线”在倾斜角为0~π的范围内进行旋转。梯形分解法常应用在作业目标区域内含有障碍物的情形,如图6(b)所示,把目标区域分割成5个子区域,又可以用牛耕往复法或者栅格法等来完成每个子区域的施药任务,当完成其中一个子区域施药工作后,无人飞机自动选择最佳的连接航线,进入下一个子区域进行施药工作。
3 植保无人飞机旋翼下洗气流
3.1 下洗气流的特征
研究人员对农业植保无人飞机下洗气流的分布特征进行了相关研究。为了全面获取旋翼向下洗气流的三维(3D)数据,将CFD技术与测试相结合,可以很好地捕捉空间中下洗气流的详细特征,并分析其现象的原因。
Yang等[28]通过重新规范组(RNG)k-ε湍流模型和动态网格技术,来研究悬停中的六旋翼农业植保无人飞机下洗气流的分布特性。结果表明,相邻的旋翼“入口”和“出口”区域气流的流动使得下洗气流的速度分布明显不对称。Yoon等[29]对悬停中的四旋翼植保无人飞机的下洗气流风场进行了数值模拟和试验验证,试验结果表明,两个相邻旋翼之间的干扰气流将影响试验测试数据的准确性。Zheng等[30]对一个六旋翼植保无人飞机在不同高度的下洗气流进行了数值模拟分析,该气流结合了滑动网格技术。结果表明,悬停高度就越大,下洗气流场分布越均匀,地面效应越小。张豪等[31]基于多孔模型,建立了基于六旋翼植物保护植保无人飞机下洗气流的3D CFD模型。研究结果表明,下洗气流的聚集将使下洗气流的速度分布更加均匀,提高气流的流速。王昌陵等[32]通过在单向线阵列中设置三个方向传感器,测量在稻田工作的油动力单旋翼植保无人飞机的机场。结果表明,最快气流在飞行方向平行发生,其次是飞行方向和垂直方向的气流速度,下洗气流的宽度随着飞行高度的降低而增加。植保无人飞机旋翼提供飞行升力的同时具有下洗气流场,这是旋翼无人飞机大田低空作业的典型特征,如图7所示。

图7 旋翼无人机气流作业特征
为了有效测量下洗气流的流向特征,研究人员设计了风场的可视化试验。根据气流可视化技术,Mylapore等[33]使用视觉材料标记技术直接观察了旋翼无人机机身的流线化和地面下冲洗气流的流线型分布。根据机器视觉,Pombeiro等[34]研究了多旋翼植保无人飞机水面下洗气流引起的波纹特性。虽然下洗气流的漩涡结构复杂,但流场的可视化可以有效地观察下洗气流的特征。
3.2 下洗气流对雾滴的影响
以往固定翼飞机喷洒农药大多依靠雾滴的自然沉降达到靶标区域[35]。如今旋翼无人飞机施药时,其产生的下洗气流对雾滴在空间中的运动规律有着绝对性的影响[36],体现在能挟持雾滴输运,提高雾滴对靶标的穿透性和均匀性;对农作物的冠层有扰动作用,改变雾滴最终在农作物上的位置。
已有研究表明,旋翼下洗气流是影响雾滴运动的关键因素。Wang等[37]为探索了下洗气流与作物树冠相互作用的机制,在水稻顶上布置了一系列风速传感器,获得了水稻不同高度的气流速度。结果表明,水稻高度越低,下洗气流速度的衰减速率就越大。王昌陵等[38]为探究植保无人飞机旋翼下洗气流场对喷雾效果的影响,测试了不同飞行速度下旋翼下洗气流分布特性与雾滴沉积分布特性。试验结果表明,随着飞行速度的提高,冠层位置X、Y、Z三个方向的下洗气流强度总体表现为由强到弱、由集中到分散的分布状态;下洗气流与外界空气相互作用产生的卷扬气流形成X方向气流,对雾滴产生逆飞行方向的作用;下洗卷扬气流和地面效应相互作用产生Y方向气流,使雾滴朝向两侧垂直于航线分布;下洗气流竖直向下的分量为Z方向气流,具有促进雾滴沉积作用;在飞行速度为1.0 m/s 和3.0 m/s时,雾滴沉积量与下洗气流场风速呈现出正相关关系,即与地面方向垂直的下洗气流场越强,则雾滴沉积量越多;当速度到6.0 m/s时,下洗气流场风速降低,使得气流场对雾滴沉积的促进作用逐渐消失。因此植保无人飞机作业时飞行速度不应设置超过6.0 m/s,避免因下洗气流场作用减弱而导致雾滴损失。陈盛德等[39]为了研究喷施雾滴在水稻植株的沉积分布规律,研究了2种不同型号无人机、不同作业参数对水稻冠层雾滴沉积分布结果的影响。结果显示,随着飞行高度和速度的增加,雾滴沉积量逐渐下降,且雾滴在空间的运动规律会受外界风场的影响。樊佳荣[40]为探究不同工况下的下洗气流聚合效应对喷雾雾滴沉积规律的影响。统计了采样面高度在 0 m、0.3 m和0.6 m上的雾滴沉积质量。试验结果表面,随采样面高度的升高,越靠近无人飞机的旋翼,旋翼下洗气流的风速越大,对雾滴产生的向下挟持作用越强烈,能够促进雾滴的沉积,提高雾滴的抗漂移能力,导致0.3~0.6 m采样面上的雾滴漂移损失率远小于0~0.3 m。秦维彩等[41]为探究无人飞机喷洒参数对雾滴在油菜不同冠层的覆盖率,使用Deposit Scan图像处理软件,计算雾滴在油菜不同冠层的分布情况。试验结果表明:雾滴在油菜冠层上的覆盖率受喷洒高度的影响比较明显,当高度为1.5 m,速度为4 m/s时,在油菜下层的雾滴覆盖率最大,占上层的53.7%;当高度为2.0 m,速度为4 m/s时,油菜上层的雾滴覆盖率最大,雾滴沉积分布最均匀,变异系数为40.21%。
除实际作业测试外,Wang等[42]在实验室测量了x、y、z方向下冲气流的速度,利用了液滴空间质量的平衡分布规律,证明下洗气流对液滴的行为有重大影响:垂直于地面方向的下气流可以改善水滴的沉积。Tang等[43]在实验室中利用高速粒子图像测速法探索了旋翼转速、旋翼与喷头之间相对位置对雾滴运动行为的影响,证实了下洗气流对雾滴沉积量和分布均匀性的影响作用。杨东辉[44]为了探究上扬的侧向气流流动对喷雾场的影响,搭建室内多功能植保喷雾施药平台,设定了四组参数(0.5 m,0 m/s),(1 m,0 m/s),(1 m,1.2 m/s),(1.5 m,1.2 m/s),得到了四组沉积效果图。分析高度为1 m和0.5 m的轨迹分布图,高度在0.5 m处的下气流场更加紊乱,使得雾滴破碎形成更多颗粒,颗粒分布更加密集。此外流场的侧向流在高度0.5 m处非常严重,使得颗粒受侧向流流动而产生漂移,呈现出十字型扩散,并且颗粒回卷现象发生在边界处。而在高度1 m处近似于菱形扩散;分析高度1 m处有无来流情况的分布图,颗粒分布在x轴的正方向比负方向更容易受到来流作用而漂移的更远。由于下洗气流场对来流有很强的抵制作用,使得颗粒在喷头的下方没有发生明显偏移的现象。此外x轴负方向涡流的产生,使得颗粒发生回卷现象;分析高度1 m 和1.5 m的颗粒分布场,随着高度提升,旋翼下流场强度分布层次丰富,使得一些扬起的雾滴漂移现象发生在高度1.5 m处的左侧。无人飞机旋翼下流场呈聚合、收缩以及下压的姿态,对雾滴的沉降是十分有利的。杨风波等[45]为探究风场分布不明晰导致的雾滴分布不均问题,引入雾滴离散相,修正了连续相的动量、能量方程,结合雷诺平均N-S方程及Realizablek-ε湍流模型,建立了下洗气流三维数学模型。试验结果表明,雾滴主要分布在“旋翼间干扰”明显的3个“引入区”和“导出区”,雾滴群交织分布在下洗区内侧。由于旋翼的高速旋转,雾滴除了受下洗气流向下作用,还到旋翼旋转方向的周向力的作用,因此雾滴除了有水平和竖直方向的运动,还有绕下洗区中心的旋转运动。此外下洗核心区气流速度大,所以该区压力比大气压小,从而大气对该区有压缩的外力,且随着下洗区向下发展,风速逐步减小,下洗区和外围压差减小,下洗区呈现出“喇叭状”的变化,这种气流变化使雾滴群在横向位移达到最大值后出现反向水平运动。
旋翼下洗气流是影响雾滴运动分布的关键因素。1970年美国农业部林业局的Dumbauld和军方研发了一款用于固定翼飞机施药的FSCBG沉积预测模型,此模型对复杂气流的沉积预测效果不太理想[46]。因此,美国农业部林业局、美国宇航局和美国军方合作研发出AGDISP模型,其目的是应用在林业、农业等航空喷洒的沉积计算[47]。从雾滴分布和旋翼气流特征来看无人飞机作业系统,其像一个“会飞的”风送式喷雾系统。除了机体位置、施药量、施药角度等参数不同外[48],最大差别在于旋翼对空气的反作用力作为该系统的风送气流。由此可借鉴风送式喷雾系统的研究成果,进一步研究植保无人飞机施药时各个飞行参数与雾滴运动规律的关系,也是未来施药作业的重要研究方向。
4 田间植保技术
4.1 航空植保技术
早在1911年,为了解决森林病虫害问题,德国人开始使用飞机喷洒农药。目前美国是具有比较完善的航空植保技术标准体系,为了解决航空植保施药中植保无人飞机的飞行、施药作业等问题,美国联邦航空局颁布了《联邦航空规章》,此外《农业航空喷洒设备校准和分布模式测试》包含了主要的技术标准。以往我国的植保无人飞机多采用固定翼,飞机的起飞和着陆必须使用跑道。此类飞机的飞行速度快、作业效率高,但雾滴漂移较多,从而使得农药浪费和污染环境。而无人直升机具有农药用量少、防治效率高、智能化程度高、可以撒播植物种子等诸多优点[49]。使得植保无人飞机广泛应用在水稻、小麦、棉花、油菜、玉米、果树等农作物的虫害防治中。
4.2 植保无人飞机在大田的应用
水稻是我国三大粮食作物中种植面积最大的作物。薛新宇等[50]为了阐明N-3型植保无人飞机对稻飞虱和稻纵卷叶螟的防治效果及应用前景,通过筛选N-3型无人直升机施药参数。结果发现无人直升机在3m高度下施药的效果最好,防治效果优于传统的担架式喷雾机。目前植保无人飞机防治水稻病虫害主要以常规农药为主,用纳米水性农药防治水稻病虫害报道较少。因此,李燕芳等[51]进行植保无人飞机喷施30%苯甲·丙环唑微乳剂防治水稻纹枯病、稻瘟病和稻曲病的试验,及探究对水稻生长的影响。试验结果表明,植保无人飞机喷施30%苯甲·丙环唑微乳剂对水稻纹枯病病株、稻瘟病病穗、稻曲病病穗与人工施药的防治效果相比,差异不大。但该施药方式对水稻中后期主要病害防治效果均优于对照药剂和人工施药的防治效果。
张宋超等[52]为保证植保无人飞机在麦田高效作业,将植保无人飞机的飞行速度和高度设置成三个不同水平。研究结果表明,在飞行速度3.0 m/s,飞行高度2.0 m,喷洒流量2.0 L/min组合下有效幅宽达到最大值为5.78 m,在飞行速度3.0 m/s,飞行高度1.5 m,喷洒流量2.0 L/min组合下雾滴最大穿透率63.8%。实现了蚜虫90%以上、白粉病80%以上和赤霉病88%以上的防治效果。
蒙艳华等[53]为研究棉花收获前植保无人飞机喷施脱叶催熟剂的效果,对4种棉花品种喷施脱叶催熟剂。试验结果表明,植保无人飞机施药后雾滴在4种棉花上的沉积分布均呈现出上部雾滴覆盖率显著高于中部和下部冠层的雾滴覆盖率,中部和下部雾滴覆盖率无显著性差异的特点。使用植保无人飞机对不同棉花品种喷施脱叶催熟剂,可以满足采棉对脱叶率和吐絮率的要求,且不会对棉花纤维品质和产量构成因子造成不良影响。
张宋超等[54]为探索油菜田杂草看麦娘的有效防治,使用Deposit Scan软件对雾滴沉积覆盖率和沉积密度分析。结果表明在其他条件相同时,与人工施药对比,小雾滴粒径能够增加植保无人飞机喷洒的覆盖率和沉积密度。植保无人飞机防治油菜田杂草看麦娘,在条件允许情况下,采用大流量、小雾滴作业喷洒,可提高防治效果。
赵冰梅等[55]为探究玉米灌浆期三点斑叶蝉的防治效果,对农药雾滴在玉米冠层的沉积分布及对三点斑叶蝉防治效果进行了研究。结果表明:旋翼产生的下洗气流使雾滴具有穿透性,且玉米冠层不同部位和叶片正反两面均可着药。随着高度增加,玉米叶片感知到旋翼向下的气流减弱;速度的增加,致使进入玉米冠层内的风量减少,使冠层顶部到下部的雾滴沉积密度明显减少。
总体上可以看出,近年来植保无人飞机在施药领域的研究取得了快速发展,但在稻田喷雾作业过程中,还存在失控、喷头堵塞、重喷、漏喷、防治效果不稳定等问题。随着无人飞机的飞控和避障等技术的不断发展,植保无人飞机必将成为大田病虫害防治的主要手段。
4.3 植保无人飞机在果树的应用
在我国果树栽培中,梨、桃、柑橘、苹果等的栽培面积和产量均位于前列。目前在大田作物上植保无人飞机喷药已经得到广泛应用,也开始逐渐应用在果树上,并且开始对一些果树的施药形成了参数。蒙艳华等[56]为了探明植保无人飞机喷雾雾滴在主干形果树冠层中的沉积分布规律,分别针对主干形桃树和梨树设计了4种飞行速度的喷雾作业。结果表明,对于主干形桃树和梨树,飞行速度对于雾滴分布均匀性的影响较大,其中对桃树雾滴分布均匀性影响最大。飞行速度为2 m/s时的雾滴沉积密度最大,此时雾滴在主干形桃树和梨树不同位置的沉积分布比较均匀。
韩鹏等[57]为明确航空喷雾在丘陵果园对柑橘的影响,研究了3类喷雾助剂对丘陵柑橘冠层及地面的沉积量分布规律。结果表明:在同一作业参数条件下,不同类型助剂对雾滴密度、覆盖率、沉积量的影响均不同。在对山地丘陵柑橘园进行精准航空施药时,在药液中添加体积分数为1.0%的倍达通、1.0%的Y-20079或0.5%的806,均可有效提高丘陵柑橘冠层的施药效果。
张盼等[58]研究了作业高度和喷头类型对无人飞机在柑橘果园喷雾效果的影响。结果显示,作业高度为1.0 m时的喷雾效果明显优于2.0 m和0.5 m时的;采用压力式喷头喷雾,药液在叶面的覆盖率大于采用离心转子喷头喷雾,雾滴沉积密度则相反。
王明等[59]为明确助剂在农药减施增效中的作用,对矮砧纺锤形栽培模式苹果园果树冠层喷雾的雾滴沉积分布及苹果黄蚜Aphis spiraecola防治效果进行研究。通过测定添加助剂对溶液表面张力、接触角、雾滴体积中径和铺展系数等溶液性质的影响,分析了植保无人飞机喷洒雾滴在矮化密植苹果园冠层的沉积密度、沉积量以及对苹果黄蚜防治效果的影响。结果表明,植保无人飞机低容量喷雾常规用量毒死蜱乳油时,在药液中添加助剂后,溶液的表面张力降低;在苹果叶片上的接触角比蒸馏水的减小很多;雾滴体积中径显著增加;提高农药在果树上的沉积量及对苹果黄蚜的防治效果。
目前,我国对山地果园喷雾的植保无人飞机还处在研究应用阶段,对山地丘陵果园的识别不精准、飞行喷药航线与设定航线存在连续和吻合性偏差。如何做到对山地丘陵果树冠层更加精准喷雾,将成为未来植保无人飞机在山地丘陵果园施药的重要方向,该探究可为航空喷雾技术的研发改进提供研究依据。
5 安全施药技术规范
农药是重要的农业生产工具,对农业有害生物的防治有着重要地位,同时农药也是有毒危险品,因此对农药使用有一定的技术要求。为了规范植保无人飞机安全施药技术,中国农业机械化协会和中国农药工业协会等针对植保无人飞机喷雾沉积测量、航路规划、农药使用等制定了一系列标准。标准的全面实施,将提高植保无人飞机施药的安全性,可以淘汰一批不符合监管要求的植保无人飞机,使得未来植保无人飞机产品更便于政府部门的管理[60]。
5.1 静电喷雾技术
传统静电喷雾技术在航空作业的基础上发展成农业航空静电喷雾技术,在喷头与农作物靶标间形成静电场[61],使其在高压静电的作用下,带电药液吸附作用于农作物靶标的正反面。中国在21世纪初对农业航空静电喷雾技术开始研究,其标志是新疆通用航空有限责任公司引进一套航空静电喷雾Z03K000B系统关键部件和喷嘴为开端[62]。在西方发达国家,农业航空静电喷雾技术发展比较成熟。最早开展了农业航空静电喷雾技术的研究是美国农业部农业研究服务署的Carlton等[63],在1966年研究出电动旋转静电喷头。为探究双极交替充电模式对航空静电喷雾系统的雾化、充电和沉积特性,美国田纳西大学的Kihm等[64]展开研究。此外,为探索雾滴经喷头释放后,周围局部的相对湿度和飞机尾流对雾滴温度的影响,Teske等[65]研究了航空静电喷雾漂移与雾滴蒸发效应。中国可借鉴国外经验,继续对静电喷雾参数相互影响机理、雾滴带电与农作物表面相互交互作用等问题开展更深入的研究,把对雾滴带电研究转成对农业航空静电喷雾技术系统的整体研究。
5.2 低空低量施药技术
低量施药技术是使用超细雾状的方式喷洒,使得一层农药膜在植物绒毛的表面形成,将农药均匀地喷洒到茎叶背面和根部,大大增加了农药与病菌和害虫接触的概率,解决过量施药造成的环境污染问题。庄浪县首次引进山东卫士植保机械有限公司生产的十八旋翼无人植保机和超低量施药技术[66],解决了病虫草害反复感染,防治效果差等问题。朱玉坤[67]为探明棉花在防治棉蚜Aphis gossypii的喷药量、喷雾方式、药剂特点三者与药效之间的关系,研究了棉花上棉蚜防治的低容量施药技术。为了明确了杀虫剂对雾滴密度和棉蚜死亡率关系的影响,雾滴密度的测量由雾滴密度卡来完成。为了确定防治棉蚜的最佳喷雾方式和喷雾量,分析不同喷雾方式喷雾时药液沉积分布规律。由南京农业机械化研究所等单位完成的863项目“水田超低空低量施药技术研究与装备创制”。使用高效低污染施药技术、自动控制技术等高新技术的融合,研发了无人驾驶的超低空低量喷施技术及装备。施药作业提高了10倍以上的效率,35%以上的农药有效利用率,20%以上的农药节约量。
5.3 低漂移喷雾技术
农药漂移是指在施药过程中或结束后,在外界条件下影响下,农药雾滴从靶标区漂移到非靶标区的运动,蒸发和随风漂移都属于农药漂移,前者是由农药的挥发性引起,而后者是由于细小雾滴被气流挟带到非靶标区引起。与发达国家相比,我国药械和施药技术都有较大的差距,在对农药漂移的研究也比较少。曾爱军[68]为了减少雾滴漂移,分析影响农药雾滴漂移的各种因素。在对国外控制雾滴漂移技术的基础上进行总结,提出采用导流罩盖技术。对双圆弧导流罩盖的防飘机理和雾滴的运动及沉积,采用计算流体力学软件进行了模拟分析与试验。试验结果表明,导流风幕的作用决定了双圆弧导流罩盖的防飘性能。出风口下方的流场受到较大的风幕作用的影响,增加了垂直向下的气流分速度,使得雾滴在喷头下方的靶标区域运动,增加了雾滴沉积率。在西方发达国家中,对药械的升级和新产品的设计都考虑如何减少漂移。Bode和Butler认为雾化装置产生的雾滴大小范围决定了农药雾滴的漂移、沉积和覆盖,若沉积在靶标上是细小的雾滴,则能够有很好的覆盖和防治效果,但小雾滴容易随风漂移。
6 存在问题
通过对国内外植保无人飞机施药技术研究进展进行分析总结,发现我国植保无人飞机技术研究还存在以下几个方面的不足。
1)飞控系统仍未成熟,运用在植保无人飞机上常规的PID算法、PID智能,很多是基于神经网络的PID算法和部分回路中使用的模糊自适应PID算法。虽然加入植保领域的植保无人飞机企业是以百计数,但是真正拥有农业植保飞控研发能力的企业并不多。
2)航路规划的是任务规划系统当中一个重要环节,引导无人飞机怎样选择最佳的航路来完成任务。目前随着植保无人飞机所执行任务的要求越来越高,以及作业区域各种因素的不确定性,对航路规划的要求也将越来越高。此外航线规划是复杂的优化问题,理论上没有绝对的最优解,只能得到靠近最优解的解。
3)对旋翼植保无人飞机风场的研究主要集中在空间维度上,对无人飞机在时间维度的流动特征的科研成果很少报道。此外对旋翼无人飞机风场下雾滴运动规律研究不足。无人飞机旋翼数量和分布不同,产生的旋翼下洗气流以及对雾滴在空间的分布规律也不同,可应用到改善雾滴沉降效果的基础性理论不多。
4)植保无人飞机静电施药系统中电极荷电等核心技术理论研究不足,其中带电材料在绝缘性能方面达不到要求,导致系统部件发生漏电现象。此外,静电喷头的荷电性能和雾化效果直接影响施药效果,对静电喷头研究不足,在静电喷头产生的雾滴粒径大小、雾滴载多少电荷量、雾滴漂移等问题并无统一的标准,严重制约了静电施药技术的推广应用。
5)航天飞行器的法律法规有待完善,方便政府部门进行管理。植保无人飞机行业标准亟需进一步完善,促进其健康发展。植保无人飞机的硬件和软件存在许多技术问题,需要花费大量时间来解决。需要越来越多从事该事业的人员共同探讨植保无人飞机在市场的推广和应用。
7 展望
为了促进植保无人飞机的健康发展,2018年中国农业机械化协会颁布了首部植保无人飞机行业标准——《植保无人飞机质量评价技术规范》(NY/T 3213—2018)[69]。如今我国植保机械标准已有82个,覆盖范围广,其标准多与国际标准接轨。目前国内植保无人飞机施药技术的研究仍处于螺旋式上升阶段。从长远发展的角度来看,随着土地流转、单位面积喷洒费用上升以及劳动力短缺等变化,植保无人飞机施药技术有较大的发展空间,对于未来植保无人飞机施药技术我们有以下几点期待。
当以往传统的单一飞行控制方案不能满足植保无人飞机的性能需求时,复合控制方法将成为未来发展的趋势。当使用一种规划方法无法满足航线规划要求时,全局和局部搜索方法的结合将是一种趋势,且处在不确定环境因素下的实时航路规划将是未来的研究重点。
静电喷雾技术、低空低量施药技术和低漂移喷雾技术的关键在于建立雾滴漂移和分布模型,所以针对旋翼植保无人飞机施药建立系统的雾滴漂移和分布模型是未来研究发展趋势。因此,可以以四旋翼农业植保无人飞机为研究对象,结合可压缩RANS方程、SST,研究处于悬停状态的四旋翼农业植保无人飞机在空间和时间维度下下洗气流的分布特征。
未来植保无人飞机施药技术会由单一模式向多元化模式转变,且减少农药使用是未来的发展趋势。按照农作物自身需求给出合适的药量是减量的关键,这就要求需要精准监测,且快速处理病虫草害的信息。因此,需要加强多机合作等方面研究。搭载监测平台,获取并处理病虫草害信息,规划植保无人飞机施药航线,实现精准喷洒,完成施药作业。
农业生产力的提高还在于航空植保技术,改善农业结构的调整,防止生态环境受到污染。对航空植保技术的扶植力度还需进一步的加强,让航空植保技术能够发挥出真正的力量,促进农业现代化的发展。
植保无人飞机产品的行业标准体系较为完善,但服务能力以及配套服务不足,有保障的后续服务亟需提高。民用无人飞机不够贴近民生,还是要更接地气。
