旋耕式棉花封土机的优化与试验*
2022-02-25于家川李明军李伟廖培旺李明升张爱民
于家川,李明军,李伟,廖培旺,李明升,张爱民
(滨州市农业机械化科学研究所,山东滨州,256600)
0 引言
棉花膜上膜播种揭膜后出苗孔的封孔,棉花膜上侧封土、播种苗期地膜出苗孔的封土,这些先进的耕作模式难以推广主要原因是作物出苗封孔的时间短,劳动强度大,密集度高,人工成本超高,并且人工作业的工效质量难以保证。而及时封土可以起到消除板结,淡化盐碱,培根护茎,提高地温,促苗转化,稳健匀发的效果。旋耕式棉花封土机工作效率可以达到约0.5 hm2/h,可以及时完成封土。因此,实现棉花封土机械化有助于推广先进的耕作模式,保证棉花的生长质量[1]。
到目前为止,已经有很多种封土机具,其中,带有旋耕刀的棉花封土机具,效果较好。另外,总结起来其存在以下几个方面的问题:(1)转速高,能耗高,效率低;(2)上土量过多;(3)取土沟最终的情况不合理。对以上问题究其原因,可知是由于没有合理的参数组合导致。
由于有关棉花封土机的论文很少,而且对于旋耕式棉花封土机参数的组合还未做过试验和研究。所以,本研究拟以自行研制的方便拆卸组合的旋耕式棉花封土机为研究对象,以封土带的横截面尺寸为评价指标,采用 Box-Benhnken 试验方法对影响封土带的尺寸的关键参数进行试验研究[2-4],寻求其最优组合并进行试验验证,可为棉花封土机的设计、机构优化等方面的研究起到参考作用。
1 旋耕式棉花封土机
1.1 整体结构
本研究设计的旋耕式棉花封土机主要由机架、限深轮、变速箱、刀轴、刀盘组件、导土装置、回土装置、护罩等组成,如图1所示。
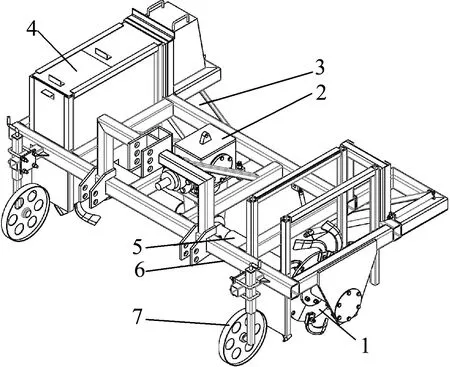
图1 旋耕式棉花封土机结构简图
旋耕式棉花封土机选用速比为14/26的变速箱;选用刀具为IT245左右弯刀,将刀库焊接到刀盘上,进而固定弯刀,每个刀盘上设计有8把均匀分布的弯刀,且同为左弯刀或者右弯刀;收集土壤装置为导土板,用平板将取到的土壤集中到一起,形成封土带,便于测量;通过测量封土带的尺寸来找出最优的参数组合;刀轴的转向与行进方向相反[4-14]。
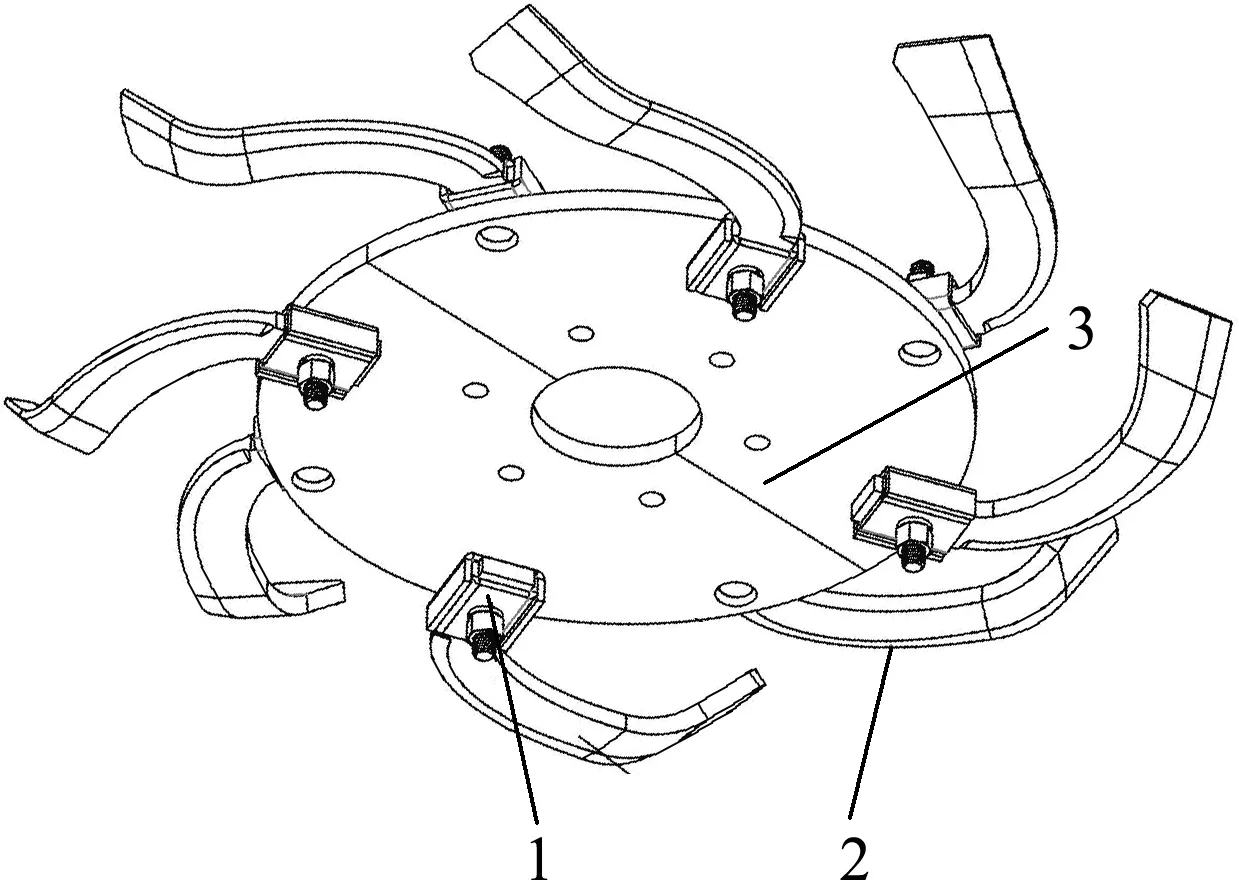
图2 刀盘组件结构图
1.2 工作原理
旋耕式棉花封土机以三点悬挂方式挂接于拖拉机后端,变速箱输入轴通过万向轴与拖拉机后输出连接。拖拉机牵引机具作业时,动力由后输出传递到变速箱,进而驱动与变速箱输出轴连接的刀轴,刀轴带动刀盘组件运转,固定在刀盘上的刀具快速旋转,并入土一定深度,从而实现土壤的破碎和抛送,导土装置将旋耕刀组抛送的土壤集中起来,形成封土带。
2 试验
2.1 试验条件与设备
试验条件:2020年5月23日至6月5日,在山东省滨州市沾化县国家科技园区试验基地进行田间试验,试验地总面积30 hm2,地势平坦,坡度<5°。土壤类型为轻黏土,年降水量454~653 mm。试验前土壤绝对含水率约为15.2 %,土壤坚实度约为23.78 kg/cm2,土壤容重约为1.75 g/cm3[15]。
试验设备:试验用拖拉机1台,牵引机械为东方红26 kW,2轮驱动的拖拉机;旋耕式棉花封土机,滨州市农业机械化科学研究所研制;标杆、钢板尺、卷尺、直角尺等。
2.2 试验方法
本试验选用封土带横截面尺寸为评价指标。在棉花封土作业过程中,存在着多个影响封土效果的因素,如机具的行进速度、田间作业状况、旋耕刀入土深度、刀轴的转速等,通过前期研究及设计确定机具的行进速度、田间作业状况、旋耕刀入土深度、刀轴的转速对机具的工作效果影响显著。在机具的试验中,通过改变拖拉机的前进速度改变机具的行进速度;通过限深轮来调整旋耕刀入土深度;通过调整拖拉机发动机的转速进而调整后输出轴的转速,最终实现刀轴转速的调整。封土带的截面尺寸可用直角尺、钢板尺量取。通过行进速度、每次试验都选取单程30 m的地块,均匀取封土带的5个截面进行测量,去平均值为最终值,并且每个参数组合重复3次,取3次试验结果的平均值作为该组试验的最终值。
2.3 旋耕式棉花封土机试验
根据现有的封土机的工作状况,本试验选取作业速度X1、刀轴转速X2、旋耕刀入土深度X3、单个刀盘旋耕刀数量X4作为封土试验的试验因素。
(1)作业速度:封土机的作业速度,没有相关的标准,通过实地的试验发现,作业低于0.5 m/s时效率太低,高于1 m/s 时机具震动厉害,且封土带不集中,不便于测量。在综合考虑后,选取作业速度的范围为0.5~1 m/s。(2)刀轴转速:刀轴转速没有相关的标准,通过实地试验发现,刀轴转速低于150 r/min时,上土量很少;高于230 r/min时,机具震动厉害,耗能高,因此,选取刀轴转速的范围为150~230 r/min。(3)旋耕刀入土深度:旋耕刀入土深度小于60 mm时,上土量很少,大于120 mm时,机具震动剧烈,耗能高,且土量过多,取土沟过深,因此,选取旋耕刀入土深度的范围为60~120 mm。(4)单个刀盘旋耕刀数量:单个刀盘上旋耕刀的数量小于4把时,几乎不上土,大于8把时,上土效果足够了,因此,选取单个刀盘上旋耕刀的数量范围为4~8把。
根据Box-Benhnken试验设计方法,以封土带的截面面积为评价指标,以X1~X4为试验因素,开展试验研究。试验因素水平编码见表1。
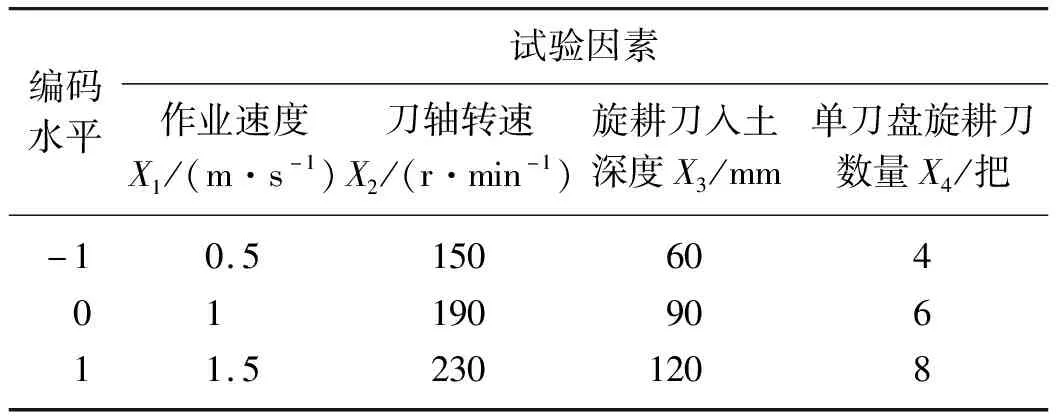
表1 旋耕式棉花封土机试验因素和水平
2.4 旋耕式棉花封土机试验结果与分析
根据 Box-Benhnken 试验原理设计了四因素三水平的试验,以X1、X2、X3和X4分别表示作业速度、刀轴转速、旋耕刀入土深度、单刀盘旋耕刀数量,Y表示土带截面面积试验方案包括了29个试验点。试验的设计方案以及试验响应值结果见2。
2.5 回归模型建立与显著性检验
针对表2中的试验数据,运用Design Expert软件进行多元回归拟合分析。采用二次多项式逐步回归法对封土带截面面积Y进行回归拟合,剔除不显著因素但保留对交互项、高次项有影响的因素,得到封土带截面面积Y的编码值回归模型,如式(1)所示。
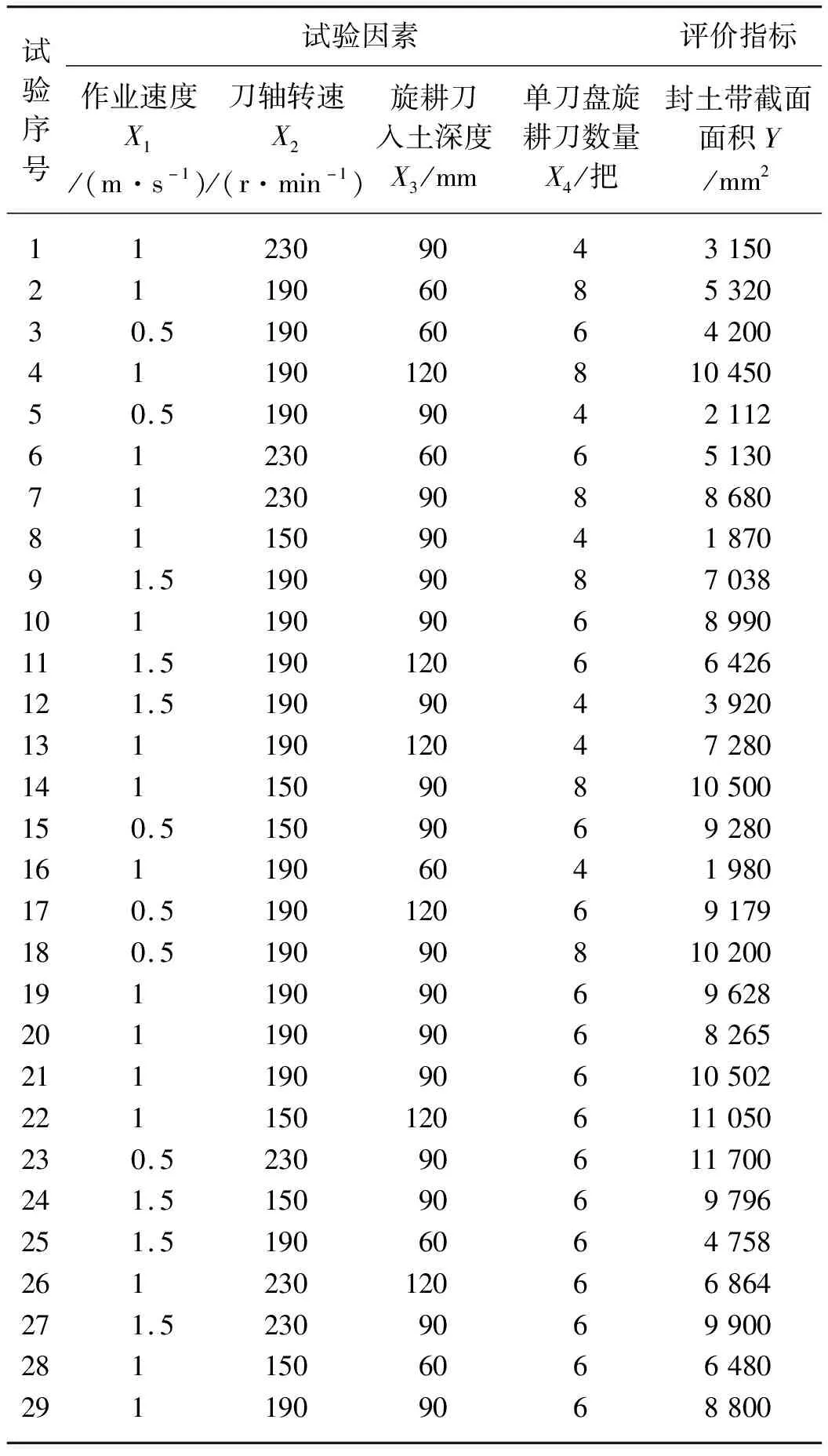
表2 旋耕式封土机试验方案及结果
Y=9 651.22+1 948.42X3+
3 170.75X4-1 242.5X1X4-
3 609.56X42-1 384X2X32-
1 543.25X32X4-3 510.47X12X32-
2 270.22X22X32
(1)
式中:X1——作业速度的编码值;
X2——刀轴转速的编码值;
X3——旋耕刀入土深度的编码值;
X4——单刀盘旋耕刀数量的编码值;
Y——封土带截面面积。
由表3分析可知,封土带截面面积Y振的模型P<0.0001,表明回归模型极显著;失拟项P>0.05(0.362 1),表明回归模型拟合度高。
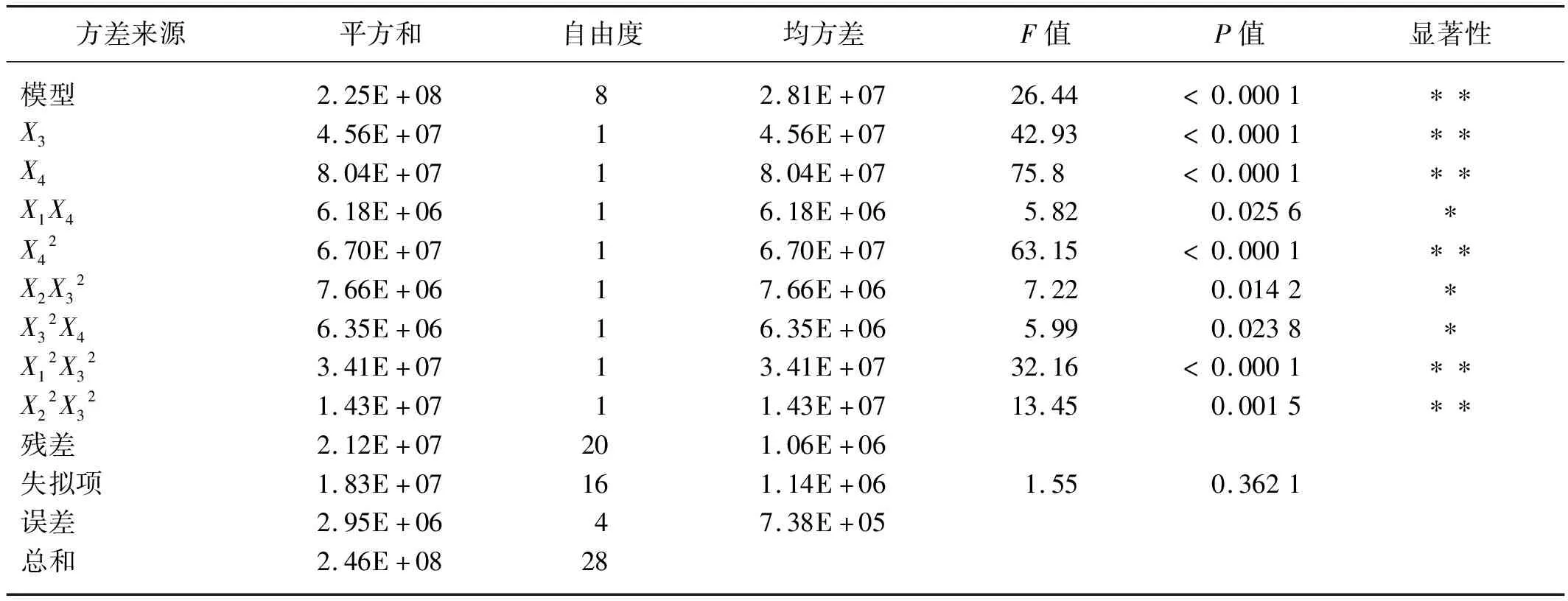
表3 封土带截面面积方差分析
各参数对回归模型的影响可以通过P值的大小反应,P<0.01表明参数对模型影响极显著,0.01
分析式(1)还可得到响应面拟合回归模型的拟合度量值R2(决定系数)及Ra2(调整决定系数),如表4所示。从表4可以看出,决定系数和调整决定系数的差小于0.2,进一步验证了旋耕式封土机作业参数可以用该模型进行优化。

表4 拟合度量值
2.6 交互因素影响效应分析
由表3可知,交互因素X12X32、X22X32对封土带截面面积影响极显著,X1X4、X2X32、X32X4对封土带截面面积影响显著。为了更加直观地分析研究双因素交互作用对旋耕式棉花封土机评价指标的影响,利用Design Expert软件绘制交互因素X12X32和X22X32对封土带截面面积影响的响应面(见图3),根据响应面图考察各交互因素对评价指标的影响。
行进速度与旋耕刀入土深度交互因素对封土带截面面积的影响效应如图3(a)所示,在试验范围内,当作业速度一定时,在低、高作业速度区域封土带截面面积随旋耕刀的入土深度的增大先增大后减小,在中作业速度区域封土带截面面积随旋耕刀的入土深度的增大而增大;当旋耕刀入土深度一定时,在低、高旋耕刀入土深度区域封土带随作业速度的增大先增大后减小,在高旋耕刀0.5~0.9 m/s,旋耕刀入土深度90~120 mm入土深度区域呈相同规律。当作业速度在范围,封土带截面面积均达到8 000~10 000 mm2。
刀轴转速与旋耕刀入土深度交互因素对封土带截面面积的影响效应如图3(b)所示,在试验范围内,当刀轴转速一定时,在低、中刀轴转速区域封土带截面面积随旋耕刀的入土深度增大而增大,在高刀轴转速区域封土带截面面积随旋耕刀的入土深度增大先增大后减小;当旋耕刀入土深度一定时,在高、中旋耕刀入土深度区域封土带截面面积随刀轴转速增大而增大,在低旋耕刀入土深度区域封土带截面面积随刀轴转速增大先增大后减小。当刀轴转速160~210 r/min,旋耕刀入土深度在90~120 mm范围时,封土带截面面积均达到8 000~10 000 mm2。
作业速度与单刀盘旋耕刀数量交互因素对封土带截面面积的影响效应如图3(c)所示,在试验范围内,当作业速度一定时,在低、中、高作业速度区域封土带截面面积随单刀盘旋耕刀数量的增大呈先增大后减小的趋势;当单刀盘旋耕刀数量一定时,在低、中单刀盘旋耕刀数量区域封土带截面面积随作业速度增大而增大。当作业速度在0.5~0.9 m/s,单刀盘旋耕刀数量在6~8把范围时,封土带截面面积均达到8 000~10 000 mm2。
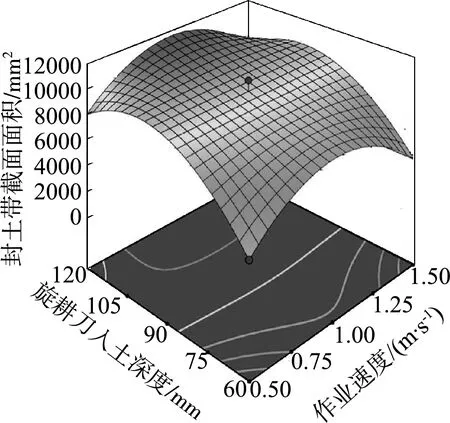
(a)旋耕刀入土深度与作业速度的交互作用
刀轴转速与单刀盘旋耕刀数量交互因素对封土带截面面积的影响效应如图3(d)所示,在试验范围内,当刀轴转速一定时,在低、中、高区域封土带截面面积随单刀盘旋耕刀数量的增加呈先增大后减小的趋势;当单刀盘旋耕刀数量一定时,在低、中单刀盘旋耕刀数量区域封土带截面面积随刀轴的增大而增大,在高单刀盘旋耕刀数量区域封土带截面面积随刀轴转速的增大呈先增大后减小的趋势。当刀轴转速在170~230 r/min,单刀盘旋耕刀数量在6~8把范围时,封土带截面面积均达到8 000~10 000 mm2。
3 参数优化及试验验证
3.1 参数优化
为获得封土带截面面积较大(8 000~10 000 mm2)的作业参数范围,将封土带截面面积较大的要求作为优化目标,对作业速度、刀轴转速、旋耕刀入土深度、单刀盘旋耕刀数量进行优化研究。运用Design Expert软件对旋耕式封土机评价指标的回归模型进行最优化求解,目标函数为:maxY;为实现高速高效作业,同时尽可能的保证土量(封土带截面面积8 000~10 000 mm2),选取变量区间为:0≤Xi≤1,其中i=1,3,4;-1 为了验证优化结果的准确性,2020年6月20日至6月21日在山东省滨州市滨城区杨柳雪镇试验基地,采用上述参数范围组合进行验证,参数范围选为:作业速度0.5~0.9 m/s、刀轴转速160~210 r/min、旋耕刀入土深度90~120 mm,单刀盘旋耕刀数量6~8把,重复三次试验,结果平均值为9 315.23 mm2,优化值范围为8 000~10 000 mm2;最优组合:作业速度0.9 m/s、刀轴转速170 r/min、旋耕刀入土深度90 mm、单刀盘旋耕刀数量8把,重复三次试验,结果平均值为9 844.39 mm2。相对误差分别为1.54%、1.39%,试验值与模型优化结果的相对误差均小于5%,由此可得,参数优化的模型可靠。 1)采用Box-Benhnken 试验方法对作业速度、刀轴转速、旋耕刀入土深度、单刀盘旋耕刀数量,对封土带截面面积的影响趋势进行了分析并建立了回归模型,通过试验对模型和优化结果进行准确性验证,实测值与优化值相对误差均小于5%,表明采用响应曲面法能够直观预测、改善和优化相关参数。 2)旋耕式棉花封土机的工作转速在160~210 r/min就可以实现封土带截面面积在8 000~10 000 mm2范围内,此土量满足封土需求,无需采用高工作转速。经过优化和试验验证得出,旋耕式棉花封土机作业参数组合范围为作业速度0.5~0.9 m/s,刀轴转速160~210 r/min,旋耕刀入土深度90~120 mm,单刀盘旋耕刀数量6~8把时,能够保证封土带截面面积在8 000~10 000 mm2范围内,其中最优解组合为:作业速度0.9 m/s、刀轴转速170 r/min、旋耕刀入土深度90 mm,单刀盘旋耕刀数量8把。3.2 试验验证
4 结论
