共轴刚性旋翼悬停及高速前飞状态气动干扰特性研究
2020-04-24肖升兴张超张华崔钊
肖升兴 张超 张华 崔钊
摘 要:文章建立了一种基于N-S方程的共轴刚性旋翼流场数值模拟方法。通过对比不同前行桨尖马赫数旋翼的实验结果,验证了该方法的准确性和模拟ABC旋翼的适用性。运用商业软件ANSYS ICEM 划分非结构化网格,采用了滑移网格和动网格技术,在FLUENT求解器中使用UDF程序实现了桨叶周期变距运动,对在悬停及大速度前飞状态下的XH-59A旋翼流场进行了数值模拟计算。计算结果表明:XH-59A旋翼在悬停状态上旋翼对下旋翼的气动干扰比较大,但随着前飞速度的增加,干扰逐渐减小;上下旋翼间的气动干扰随总距的增加呈先增大后减小的趋势。
关键词:共轴刚性旋翼;气动干扰;XH-59A;滑移/动网格;高速前飞
中图分类号:V211 文献标志码:A 文章编号:2095-2945(2020)10-0001-05
Abstract: A numerical simulation method of coaxial rigid rotor flow field based on NS equation is established. The accuracy of the method and the applicability of the simulated ABC rotor are verified by comparing the experimental results of the different forward propeller. Using the commercial software ANSYS ICEM to divide the unstructured grid, using the sliding mesh and dynamic mesh technology, the FLUENT solver uses the UDF program to achieve the blade periodic variable motion, before the hover and the high velocity. The aerodynamic characteristics of the XH-59A rotor were analyzed. The simulation of the flow field of the rigid rotor XH-59A shows that the aerodynamic characteristics are in agreement with the experimental results. The aerodynamic interference of the upper rotor to the lower rotor in the hovering state is relatively large, but the interference decreases with the increase of the forward speed.
Keywords: coaxial rigid rotor; aerodynamic interference; XH-59A; sliding mesh and dynamic mesh; high speed forward flight
引言
與常规共轴旋翼相比,共轴刚性旋翼的桨叶刚性地连接在桨毂上,无挥舞铰和摆振铰,只保留变距铰。高速前飞时,旋翼仅有周期变距,后行桨叶逐渐卸载,前行桨叶提供更大拉力;旋翼反转,抵消扭矩,侧向力平衡,结构紧凑,气动性能高。
关于共轴刚性旋翼气动特性的研究较多,但大多是针对悬停状态的研究,而且研究的大多数是一些尺寸较小的刚性旋翼,本文通过某种数值模拟方法,初步对悬停及大速度前飞状态下的XH-59A旋翼进行了气动特性计算及气动干扰分析。
1 数值计算方法
本文基于非结构滑移/动网格方法,通过数值求解N-S方程对XH-59A共轴刚性旋翼的非定常流场进行真实的数值模拟。使用商业软件ANSYS ICEM划分非结构化网格,再导入ANSYS FLUENT完成计算。
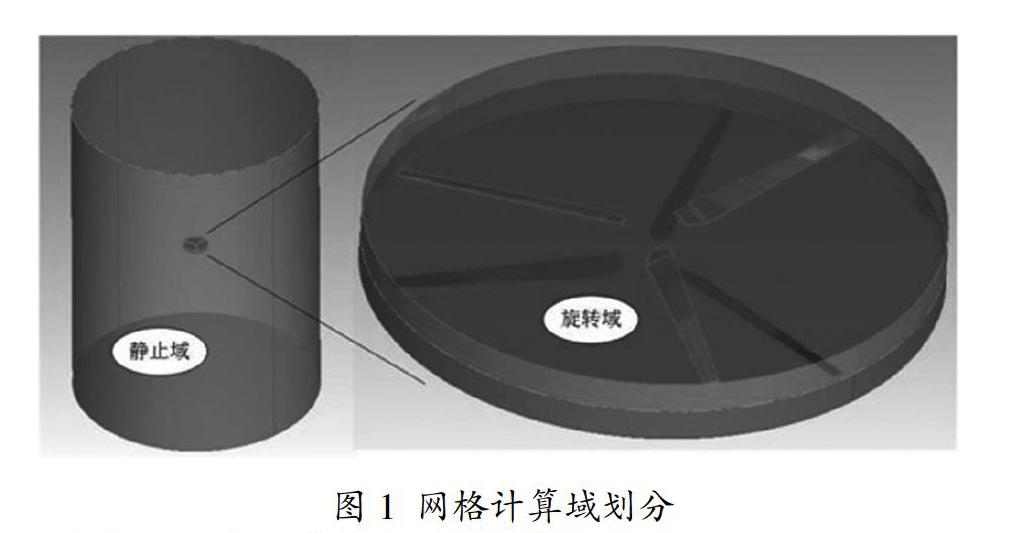
以XH-59A旋翼为例,如图1 所示,将整体流场网格系统划分为外部背景区域和内部旋转区域。整个网格系统体网格单元总数约990万,计算域为[0,10R]×[0,2π]×[-15R,15R]。区域网格切片图如图2所示,桨叶表面加密区的贴体区域边界层网格数为8 层,第一层网格厚度取弦长(c)的10-4,以保证叶片表面绝大部分Y+小于60。
湍流模型采用S-A模型, 选择SAMPLE二阶隐式求解方法。上旋翼绕Y轴负方向转动,下旋翼反向,转速均为36.11rad/s。圆柱端面及环面设置为远场边界条件。初始条件给定整个流场的标准大气压强和零速度,设置各旋翼的拉力系数和扭矩系数为监视值,当旋翼拉力系数和扭矩系数呈稳定的周期性变化时,认为计算收敛。拉力系数和扭矩系数的定义见公式(1-2)。
CT= (1)
CQ= (2)
2 算例验证
采用了Nagashima共轴旋翼[1]和ONERA旋翼[2]两个算例。Nagashima共轴旋翼在悬停状态的气动力与实验值对比结果如图3所示,ONERA旋翼桨尖部分的静压分布与实验值对比结果如图4所示。
由图3可以看出,CFD预测的旋翼性能曲线与实验值基本吻合,CFD计算的拉力略小,扭矩略大于实验值。以上误差是由于CFD选用全湍流模型、人工粘性等因素,而实验中有层流和湍流,流动耗散较小。但总体而言误差在可接受的范围之内,说明本文所用的数值计算方法可以适用于旋翼亚音速流场。
从图4可以看出, 在不同方位角压力分布计算值与试验值都吻合得很好。该状态前行桨叶桨尖马赫数达到了0.92,由此可见,本文所用的数值计算方法可以适用于旋翼跨音速流场。
3 XH-59A旋翼气动分析
3.1 悬停状态气动分析
XH-59A旋翼在上世纪进行过风洞试验[3]和飞行试验[4],有比较丰富的试验数据。旋翼参数见表1。
由于缺乏NACA63224A、NACA63218A和 NACA6321
3A翼型的數据,故采用NACA63224、NACA63218和NAC
A63213替代。以上、下旋翼总距均为12°作计算状态,如图4和图5所示,经过6圈左右的迭代计算后,旋翼拉力系数和扭矩系数均呈现周期性变化,可认为计算结果收敛。
由图5和图6可知,当θ0U=θ0L=12°时,下旋翼扭矩约为上旋翼扭矩的97%,而下旋翼拉力却只占上旋翼的86%,说明下旋翼受上旋翼诱导速度的干扰,有效迎角减小,且效率不及上旋翼。由拉力系数和扭矩系数(功率系数)换算可得到上、下旋翼的拉力周期平局值分别约为32480N和27950N,上下旋翼的反扭矩周期平局值分别约为17990N?鄢m和17200N?鄢m。计算得到的旋翼总升力约为60430N,总需用功率约为1270kW,这与XH-59A直升机总重为6032.8kg,旋翼驱动发动机额定输出功率为1193.1kW刚好相对应。
拉力和扭矩的周期性变化可能是由于“厚度效应”引起的,即上下旋翼桨叶相遇时,由于桨叶剖面翼型存在一定的厚度和迎角,是两片桨叶之间的间距迅速减小,根据“文氏效应”,上旋翼桨叶下表面、下旋翼桨叶上表面的静压值都减小,结果导致上旋翼桨叶拉力突然减小,下旋翼桨叶拉力突然增大[6]。XH-59A每副旋翼各有3片桨叶,因此旋翼每转一周,每片桨叶都会相遇6次,故旋翼拉力产生6次波动,这与邹茂真[7]的X2旋翼每旋转一周旋翼拉力产生8次波动的气动研究结果相吻合。
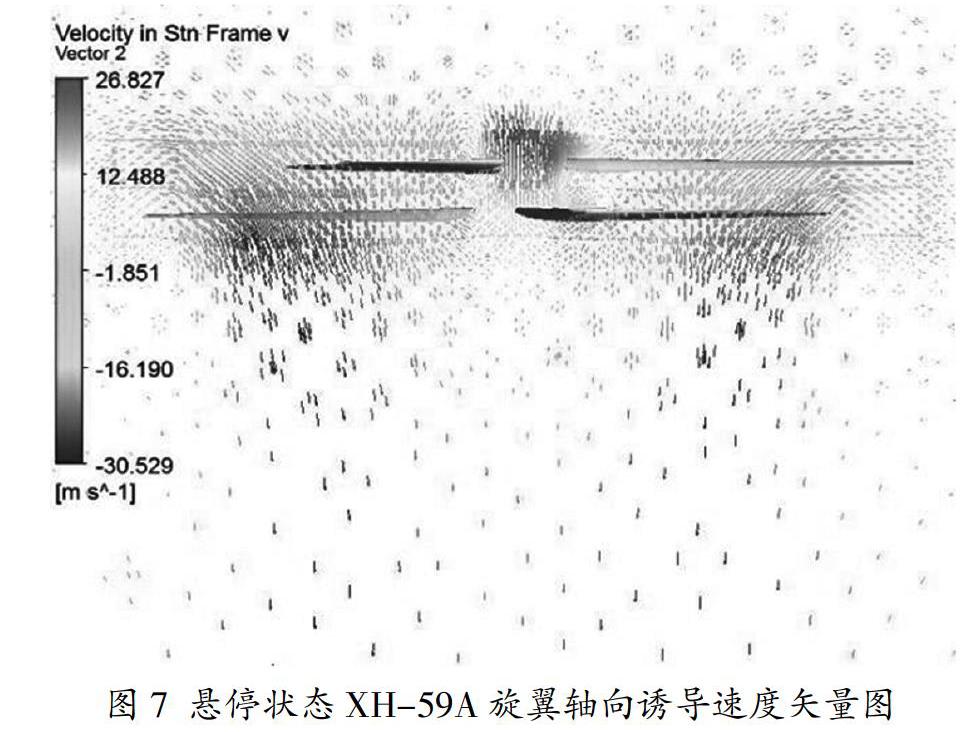
图6 显示的是悬停状态XH-59A旋翼轴向诱导速度矢量图,由图可知下旋翼平均诱导速度大于上旋翼,上、下旋翼桨盘处的最大诱导速度分别在0.75R和0.65R左右。
3.2 前飞状态气动分析
刚性共轴双旋翼通过以下6个操纵变量实现对旋翼的操纵:
其中,下标U和L分别代表上下旋翼,θ0为总距、Δθ0为差动总距,A1为纵向周期变距、A′1为差动纵向周期变距,B1为横向周期变距、B′1为差动横向周期变距。
则桨叶的变距运动可由以下方程描述:
θU=θ0+Δθ0-(A1+A′1)cos(ψU+Γ)-
(B1+B′1)sin(ψU+Γ) (6)
θL=θ0-Δθ0-(A1-A′1)cos(ψU+Γ)+
(B1+B′1)sin(ψU+Γ) (7)
其中,相位滞后角Γ=40°,用于校正桨叶对变距操纵的延迟效应,因为实际情况桨叶达不到完全刚性[5]。
桨叶的运动通过加载UDF驱动程序实现,并采用弹性光顺法和局部网格重构法相结合的方式对网格进行更新[7]。
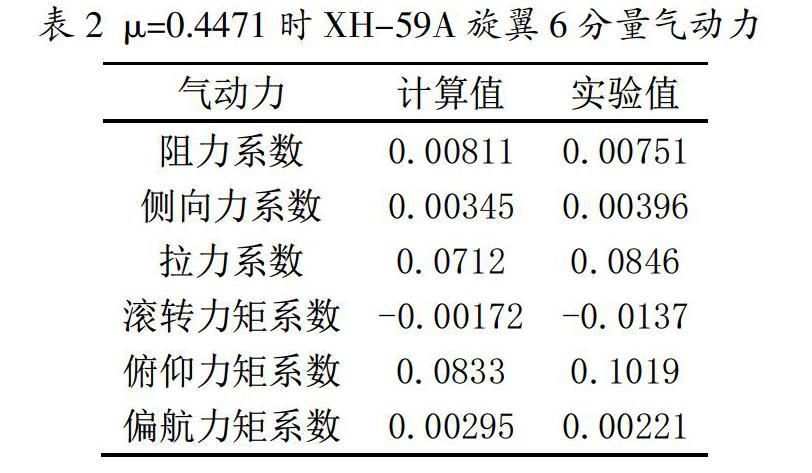
选择前进比为0.4471,旋翼桨尖速度为185.04m/s的高速前飞状态[3]做CFD计算。表3给出了中等飞行状态和高速飞状态下旋翼6分量气动力计算值和实验值的对比。从表2可以看出,各气动力的计算值和实验值比较相符。
表2 μ=0.4471时XH-59A旋翼6分量气动力
上下旋翼拉力系数随方位角变化曲线的对比如图8所示。上下旋翼的前、后行桨叶升力展向分布如图9所示。
从图8可以看出,相对于悬停状况,高速前飞时上下旋翼拉力相差并不大,这是因为高速状态旋翼尾迹形状发生了变化,上旋翼尾迹几乎不通过下旋翼桨盘平面,因此上旋翼对下旋翼的干扰减小;而上下旋翼拉力随方时间的波动幅度均变大,这是因为随着前进比的增大,气流相对速度周向分布更加不均衡。图9表明XH-59A旋翼中上下旋翼的升力偏置现象明显,实现了后行桨叶卸载,充分发挥了前行桨叶的升力潜力。本文的数值模拟方法可用于ABC旋翼大速度前飞气动性能计算。
为进一步研究共轴刚性旋翼的气动干扰,本文还计算了桨尖速度为198.12m/s,上下旋翼总距均为8°时,不同前飞速度下共轴刚性旋翼的气动特性;以及桨尖速度为198.12m/s,前进比为0.2,总距θ0不同(Δθ0=0)时,上下共轴刚性旋翼的气动特性。
图10给出了上下旋翼总距均为8°时,下旋翼与上旋翼拉力的比值随前进比的变化曲线;图11给出了前进比为0.2时,下旋翼与上旋翼拉力的比值随总距θ0的变化曲线。
从图10可以看出,上下旋翼总距均为8°时,下旋翼与上旋翼拉力比随前进比增大而增大,这说明上旋翼对下旋翼的干扰随前进比的增大而减弱,这个规律与邓彦敏[8]的试验结果一致;从图11可以看出,前进比为0.2时,下旋翼与上旋翼拉力比随总距的变化范围较小,但总体趋势为随总距增加先增大后减小。
4 结论
本文运用商业软件ANSYS ICEM划分非结构化网格,采用了滑移网格和动网格技术,在FLUENT求解器使用UDF程序实现了桨叶周期变距运动,对在悬停及大速度前飞状态下的XH-59A旋翼进行了气动特性初步分析,得到了一些具有一定参考意义的结论:
(1)算例旋翼的计算结果表明本文所用的数值计算方法可以适用于旋翼亚音速和跨音速流场计算。
(2)在上、下旋翼总距均为12°时的悬停状态,下旋翼拉力仅为上旋翼的86%左右,下桨盘平面诱导速度明显大于上桨盘诱导速度,说明悬停状态下旋翼受上旋翼干扰较大。
(3)在进比为0.4471,旋翼桨尖速度为185.04m/s的高速前飞状态,气动力的计算值在试验值的范围内,且升力偏置现象明显,充分发挥了前行桨叶的升力潜力,符合ABC旋翼特性,说明本文数值计算方法适用于计算共轴刚性旋翼高速前飞时的气动特性。
(4)上下旋翼总距均为8°时,下旋翼与上旋翼拉力比随前进比增大而增大,这说明上旋翼对下旋翼的干扰随前进比的增大而减弱。
(5)前进比为0.2时,下旋翼与上旋翼拉力比随总距的变化范围较小,但总体趋势为随总距增加先增大后减小。
参考文献:
[1]Coleman C P.A Survey of Theoretical and Experimental Coaxial Rotor Aerodynamic Research:NASA TP-3675[R]. Washington D.C.: NASA, 1997.
[2]Philippe J J, Chattot J J.Experimental and theoretical studies on helicopter blade tips at ONERA[C]. Six European Rotor craft and Powered Lift Aircraft Forum, 1980.
[3]Felker F F.Performance and Loads Data from a Wind Tunnel Test of a Full-Scale Coaxial Hingeless Rotor Helicopter[R]. NASA-TM-81329, 1981.
[4]Ruddell, A. Advancing Blade Concept (ABC) Technology Demonstrator[R].Technical report, U. S. ArmyResearch and Technology Labotratories (AVRADCOM), USAVRADCOM-TR-81-D-5, Apr 1981.
[5]George Jacobellis. A Physics-Based Approach to Trim Optimization of Coaxial Helicopters in High-Speed Flight[C]. American Helicopter Society 71th Annual Forum, Virginia Beach, Virginia, May 5-7,2015.
[6]朱正,招啟军,李鹏.悬停状态共轴刚性双旋翼非定常流动干扰机理[J].航空学报,2016,37(2):568-578.
[7]邹茂真.共轴刚性高速直升机机体结构减震设计研究[D].南京航空航天大学硕士学位论文,2017.
[8]邓彦敏,陶然,胡继忠.共轴式直升机上下旋翼之间气动干扰的风洞试验研究[J].航空学报,2003,24(1):10-14.
