P2构型混合动力汽车电压控制功能算法研究
2022-02-24潘忠亮赵慧超李帅
潘忠亮 赵慧超 李帅
(1.中国第一汽车股份有限公司新能源开发院,长春 130013;2.汽车振动噪声与安全控制综合技术国家重点实验室,长春 130013)
主题词:混合动力汽车 驱动电机 母线电容 电压控制
1 前言
高压电池作为混合动力汽车(HEV)中最有应用前景的能量源,面临着诸多挑战。当高压电池管理系统(Battery Management System,BMS)出现严重故障时,会降低高压电池的输出性能,甚至使其无法工作,进而无法经DC∕DC对12 V电源充电。多数HEV为节约成本取消了发电机,当BMS出现严重故障切断继电器时,只有12 V 电源为所有低压负载供电,易被耗尽而使HEV无法继续行驶。
针对BMS 故障问题,应用失效模式和效果分析(Failure Mode and Effect Analysis,FEMA)、故障树分析(Fault Tree Analysis,FTA)等方法可起到一定的预防作用,但不能解决故障发生后的问题。通过增加电路结构可以提高BMS 的容错能力,但会增加成本。利用母线电容电压作为电机控制目标,通过电压控制器得到电压角度,利用电流控制器得到电流滞后电压角度,将以上2 个角度之和输入驱动电机控制器(Motor Control Unit,MCU),通过控制驱动电机发电为母线电容充电,目前只应用于摩托车。此方法的弊端为电压控制器得到的电压角度与电流控制器得到的电流滞后电压的角度易形成相位延时,控制效果不理想。
针对P2构型混合动力汽车BMS发生严重故障切断继电器的情况,本文以母线电压为控制目标,根据实测母线电压与母线电容电压进行PI 调节,以电机转矩指令为输出,构成电压环,再利用转矩指令计算出电流指令,根据电流指令与实测电流进行PI 调节,构成电流环,实现双闭环控制,基于电控系统双闭环结构的响应性和稳定性,设计双闭环的系统参数。针对电压控制作用工况,设计切换电压控制状态的条件,基于电磁参数和负载对电压控制的影响,设计相关仿真和试验,验证电压控制功能的可行性。
2 电压控制功能的应用
P2构型HEV结构如图1所示,离合器接合时,车辆以混合动力模式行驶,离合器断开时,车辆以纯电动模式行驶。当BMS发生严重故障切断继电器时,驱动电机以母线电压为控制目标,通过控制驱动电机发电满足DC∕DC工作条件,为12 V电源供电。简易高压拓扑如图2所示。
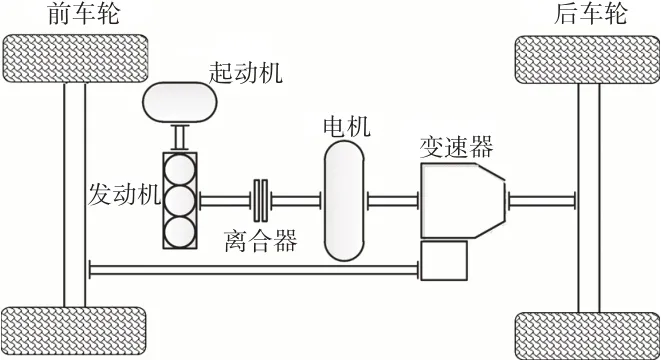
图1 P2构型HEV
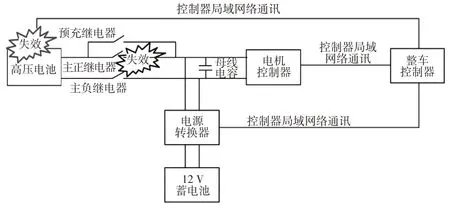
图2 P2构型BMS严重故障条件下的高压拓扑
驱动电机在转矩控制模式下,以整车控制器(Vehicle Control Unit,VCU)转矩指令为控制目标,从整车转矩指令中分解出目标电流,进行电流闭环控制。在转速控制模式下,以整车转速指令为控制目标,通过实际反馈转速和目标转速得到转矩,再分解出目标电流,进行转速环和电流环的双闭环控制。电压控制功能以母线电压为控制目标,根据实测母线电压与母线电容电压进行PI调节,实现电压闭环。
2.1 电流环参数设计
电压环与电流环双闭环控制结构如图3所示,以电机母线电压为控制目标,通过PI 调节获得转矩。将转矩分解获得目标电流,再根据目标电流与实测电流进行PI调节,实现电流闭环。
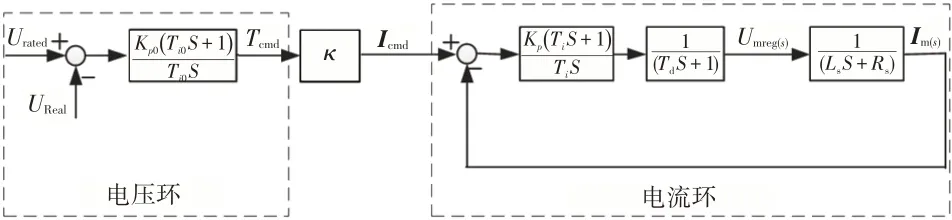
图3 电压环与电流环双闭环结构
图3中,为电机母线电压目标值,为母线电压实测值,K为根据电压指令与反馈值计算得到的比例项系数,T为电压指令与反馈值的积分时间,为根据电压指令和反馈值计算得到的电机转矩指令,为最大转矩电流比(Most Torque Per Ampere,MTPA)曲线中转矩和电流矢量的对应值,为电机转矩指令对应的电流矢量,K为电流环比例项系数,T为电流环积分时间,为系统的复变量,为载频周期对应的延时时间,为逆变器输出电压值,为定子电感,为定子电阻,为电机反馈电流矢量。
表1所示为驱动电机参数,本文母线电容标称值为530 μF,耐压值为564 V,逆变器耐压值为750 V,过流阈值为800 A。

表1 驱动电机参数
由图3可知,电流环开环传递函数为:

分子和分母同时除以可得:

式中,为上升时间。
取=T=∕,电流环闭环传递函数为:

根据二阶系统标准传递函数:

式中,()、()分别为系统输出函数、输入函数;为系统阻尼比;为系统自然频率。
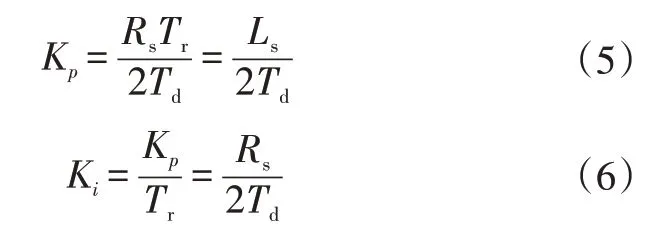
当二阶系统的阻尼比为0.707,系统的超调量为4%时,系统可获得较好的综合性能。因此:
2.2 转矩对应电流幅值参数设计
关于的计算,因为电压控制为HEV的一种跛行控制状态,所以驱动电机全域工作点在恒转矩区。对于正弦波永磁同步电机而言,转子上不存在阻尼绕组,则电动机电压方程为:
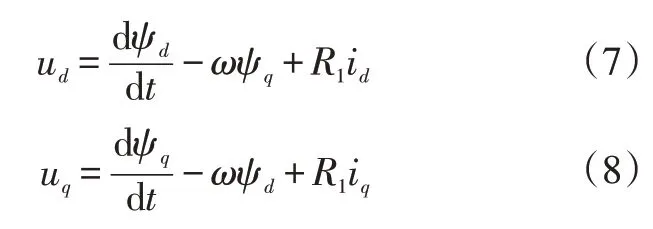
电磁方程为:
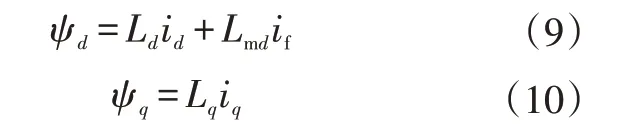
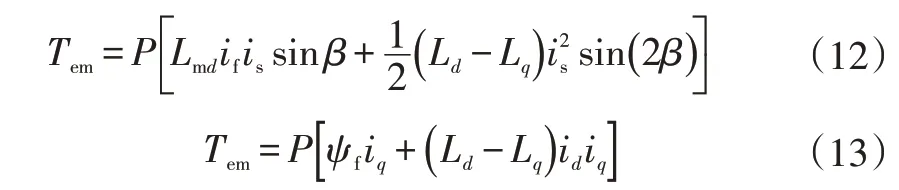
电磁转矩方程为:

式中,u、u分别为直轴、交轴电压;i、i分别为直轴、交轴电流;ψ、ψ分别为直轴、交轴磁链;为电机转速;为电机定子电阻;L=+、L=+分别为定子绕组的、轴电感;、分别为定、转子间的、轴互电感;为定子漏电感;为永磁体的等效励磁电流,当不考虑温度对永磁体性能的影响时,其值为一常数,=∕;为转子磁链;为电机转矩;为电机极对数。
假设定子磁链与永磁体产生的气隙磁场间空间电角度为,如图4 所示,有i=cos,i=sin,其中为定子电流矢量幅值。
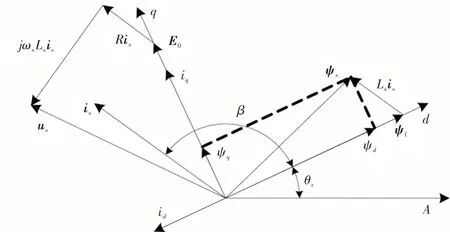
图4 电机控制矢量图
根据图4中电流关系和式(11)可得:
当≠时,恒转矩区域用标幺值表示为:
当驱动电机工作在MTPA区域时:
式中,=L∕L。
将式(17)用标幺值表示,并带入式(14)可得:
图5所示为标定驱动电机获得的台架转矩对应、轴电流,图6所示为转矩对应MTPA解耦的、轴电流,图7所示为转矩对应的范围。
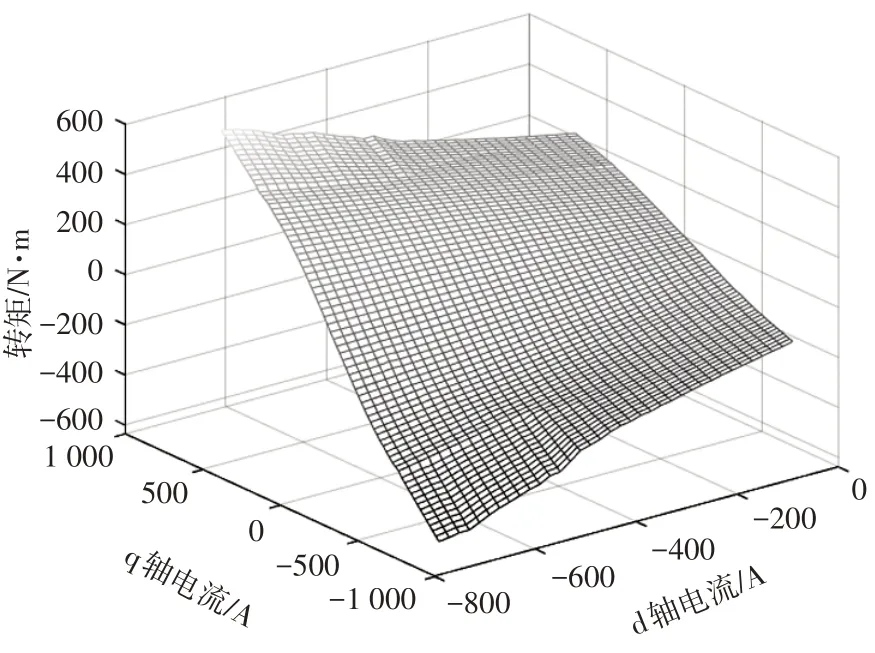
图5 台架转矩对应d、q轴电流

图6 MTPA转矩对应d、q轴电流

图7 κ取值范围
2.3 电压环参数设计
根据图3,整个系统的闭环传递函数为:
根据式(1)~式(3),整个系统闭环传递函数为:

根据劳斯-赫尔维茨稳定判据,可得K>0,T>0。
2.4 电压控制功能进入和退出参数设计
电压控制功能的开启与关闭应同时考虑母线电压和驱动电机转速,为避免在电压控制时出现反复开启和关闭的情况,进入和退出电压控制的母线电压和驱动电机转速都存在滞环。
进入电压控制的驱动电机转速应等于发动机怠速转速。跛行状态下发动机通过离合器与驱动电机直连,退出电压控制的驱动电机转速应小于母线电容耐压值和逆变器耐压值对应的驱动电机转速限值。图8所示为各温度下仿真和试验测得的1 000 r∕min 对应的反电势,由于驱动电机磁链受电机温度影响,本文应用仿真和试验测得驱动电机最大磁链,取母线电容耐压值与逆变器耐压值中较小者推导退出电压控制的驱动电机转速。
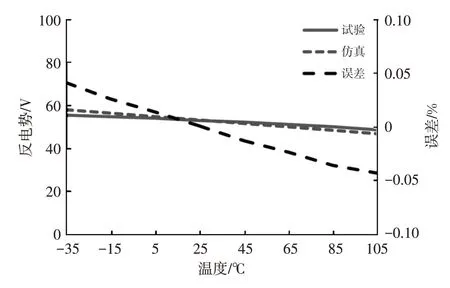
图8 不同温度对应反电势
进入电压控制的母线电压应等于进入电压控制的驱动电机转速对应的反电势。退出电压控制的母线电压应小于电压控制状态驱动电机最高转速对应的反电势。虽然可以通过电压闭环控制来调节母线电容电压,但因DC∕DC功率波动会导致母线电压波动,应保证DC∕DC抛负载不会损坏功率器件。本文高压拓扑中的DC∕DC 峰值功率为2.5 kW,工作电压范围为180~430 V,降额电压为240 V。对不同功率负载进行仿真,阶跃负载以0.5 kW 为步长,增加至5 kW,其中输入3 kW 阶跃负载时的仿真结果如图9 所示。不同功率的阶跃负载对母线电压波动的影响情况如图10 所示,由图10 可知,随着负载的增加,母线电压被拉低和被拉高的幅度都会增大。
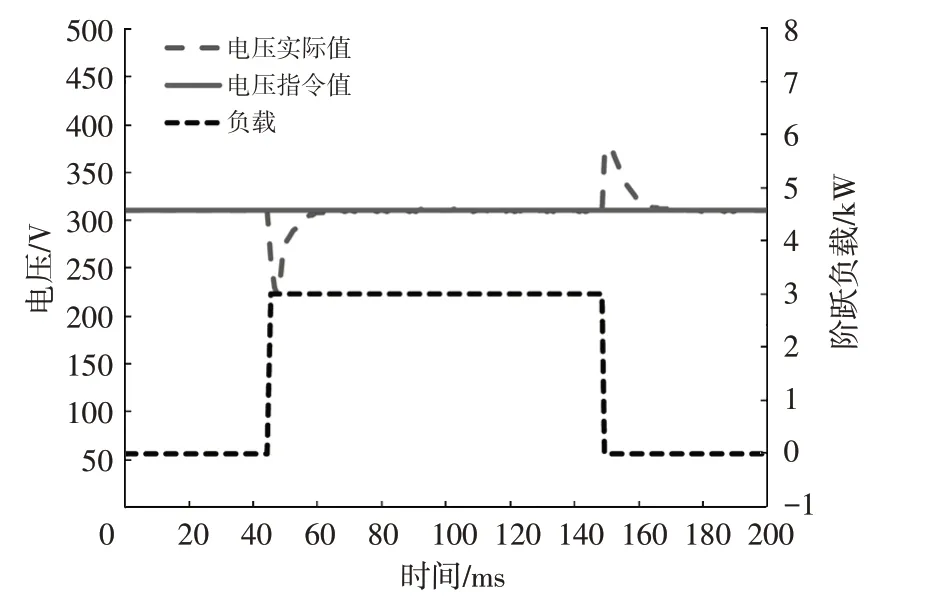
图9 3 kW阶跃负载仿真结果
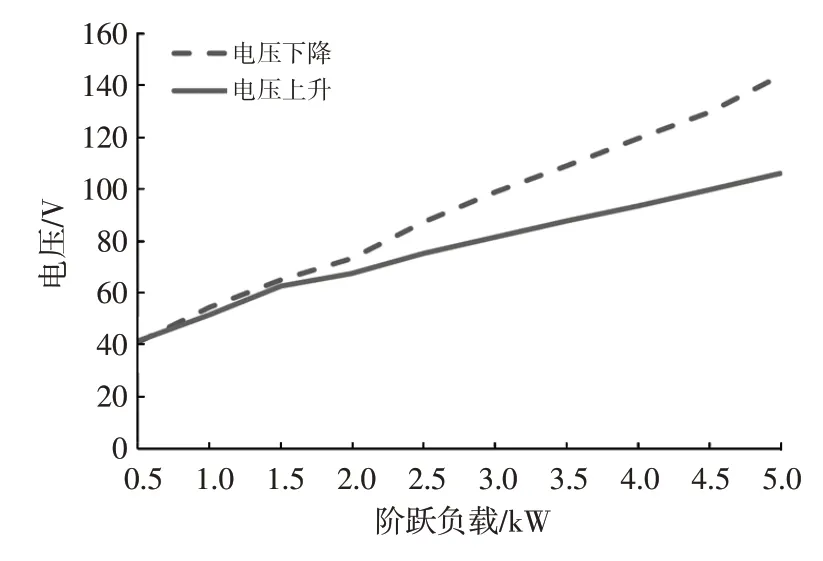
图10 阶跃负载对应母线电压波动
以驱动电机母线电压值310 V 为目标电压进行仿真,如图11 所示,在30 ms 内仿真电压值跟随电压指令值,电压波动峰值小于10%,之后迅速稳定在310 V,满足设计要求。
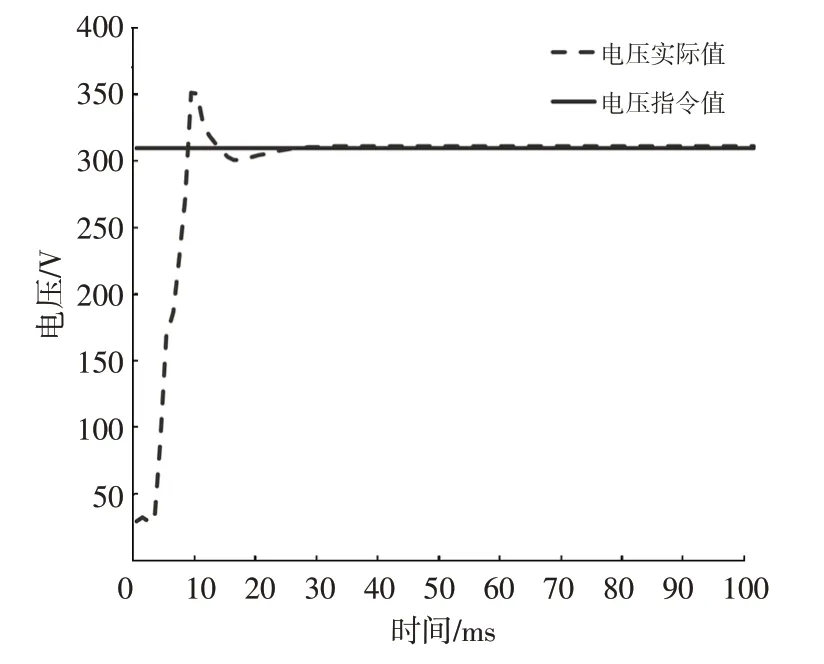
图11 电压控制仿真
3 电压控制功能的实车测试
在VCU、BMS 和MCU 控制交互过程中,应保证BMS 切断继电器后,屏蔽与其相关的控制器局域网络(Controller Area Network,CAN)通讯,保证发动机跛行能正常工作。为保证MCU 能迅速稳定执行电压控制,VCU 在电压控制稳定前禁止DC∕DC 工作,防止DC∕DC负载变化导致母线电压波动而无法进入电压控制模式。图12 所示为整车试验测试系统布置情况,包括上位机、数据采集工具和整车与上位机接口线束等。

图12 整车试验测试系统布置
本文实车验证了电压控制功能的稳定性,主要包括低压负载全功率输出触发电压控制、电压控制状态下的驱动电机转速急变、电压控制的时序和注入电流传感器偏差等4 种试验工况。图13 中,HEV 在低压状态下进行低压负载全功率输出,此时触发电压控制,维持低压负载全功率输出一定时间后关闭低压电源。DC∕DC 工作时母线电压被拉低,关闭低压电源后DC∕DC 退出工作,母线电压被拉高。图9 中相同负载下过压值基本低于欠压值,这是因为仿真中两者时间相等。HEV中DC∕DC 全功率输出结果与理想状态下的仿真结果存在一定偏差,通过计算可知,电压控制中欠压值和过压值变化均符合设计要求。
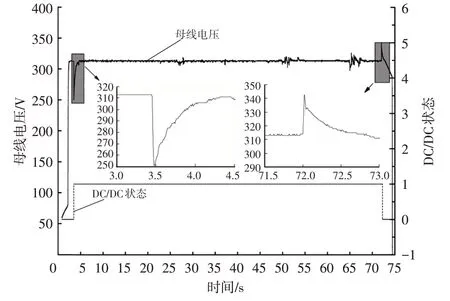
图13 低压全负载下触发电压控制
图14所示为电压控制状态油门开度100%条件下,驱动电机转速急剧变化时电压控制的稳定性验证结果。图15所示为电压控制状态开启∕关闭低压电源切换条件下,电压控制时序的验证结果。图16 所示为电流传感器注入偏差,电压控制状态下油门开度100%驶过减速带时的电压波动情况。
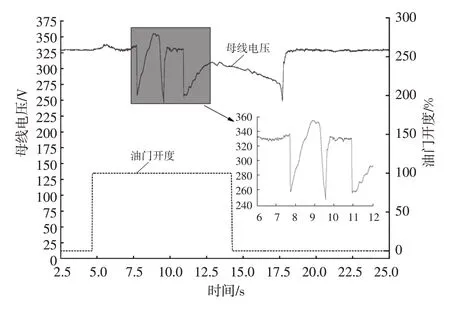
图14 油门开度100%对应母线电压波动
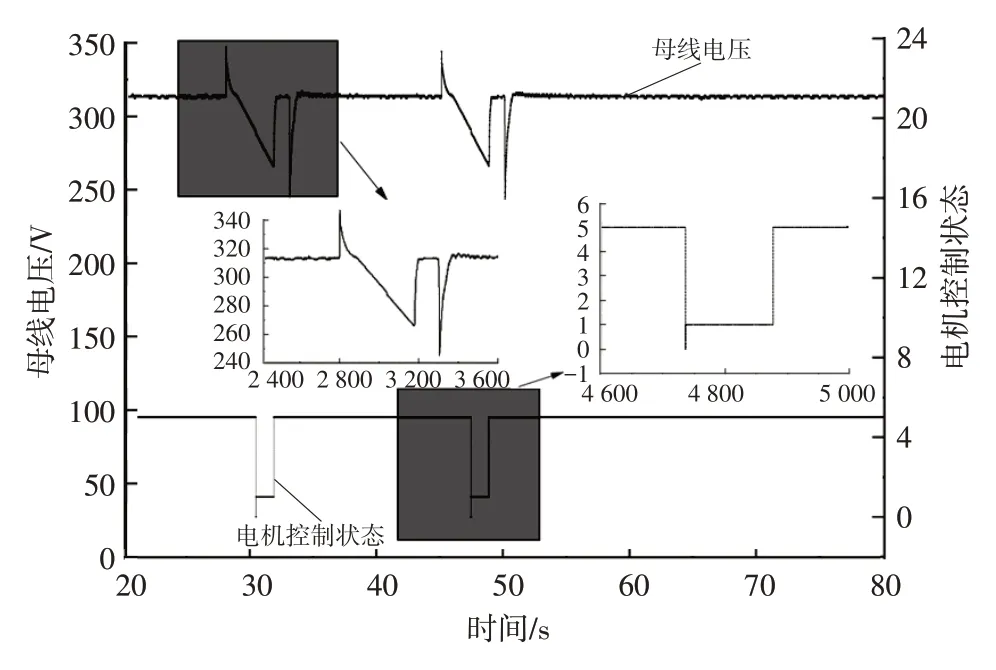
图15 电压控制状态切换对应母线电压波动
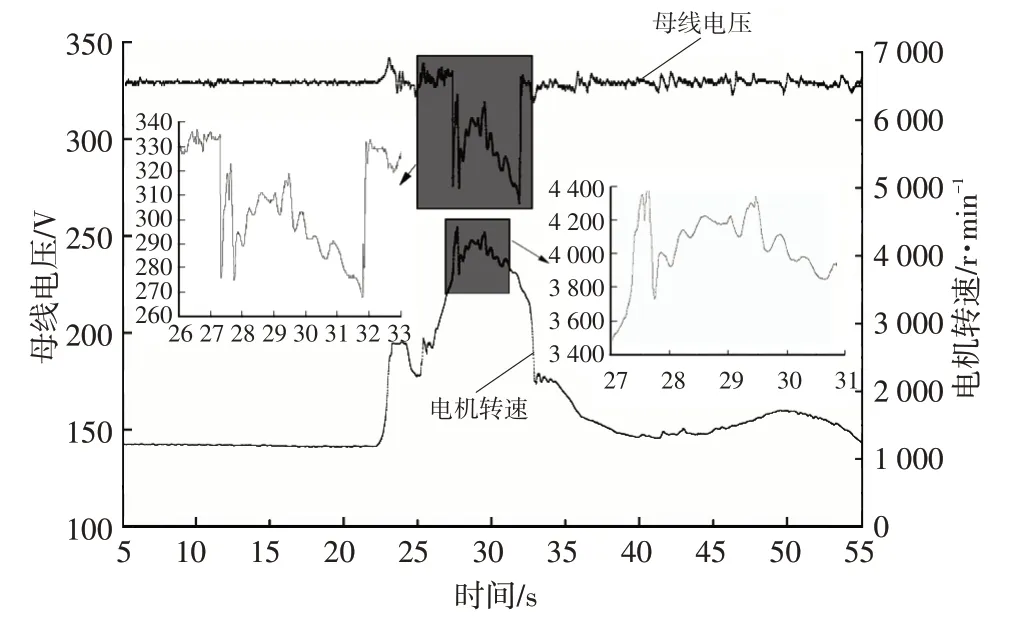
图16 电流传感器注入偏差对应母线电压波动
上述各状态下均未出现过流、过压等失控情况。虽然进入电压控制的母线电压不同,但根据不同试验的母线电压变化值和计算补偿的电压值可知,极端工况下的母线电压值均未超过逆变器和母线电容的耐压值,证明电压控制可应用于P2构型HEV,解决BMS 发生严重故障切断继电器后12 V电源易馈电而被迫停车的问题。
4 结束语
本文针对P2构型混合动力汽车BMS发生严重故障切断继电器的情况,提出了以母线电压为控制目标的电压控制方式,建立了P2 构型HEV 电控系统的传递函数,并基于双闭环的系统响应性和稳定性,设计了双闭环系统的相关参数。其次,根据电压控制功能的作用工况,设计了切换电压控制状态的转速和电压,基于电机温度对电机电磁参数的影响和DC∕DC 等负载对母线电压的影响,进行了电机温度对电磁参数影响的仿真和试验,针对DC∕DC 等负载对母线电压的影响进行了仿真,并设计了相关整车试验,最终仿真和实车试验都验证了电压控制的可行性。
