基于ECMS和Radau伪谱拼接法的多模式HEV能量管理策略优化*
2022-02-24赵克刚麦茂瑜李梓棋刘延伟甄玉珂
赵克刚 麦茂瑜 李梓棋 刘延伟 甄玉珂
(1.华南理工大学,广州 510641;2.广东工业大学,广州 510006)
主题词:混合动力汽车 能量管理策略 等效燃油消耗最小策略 Radau伪谱拼接法
1 前言
在混合动力车型开发中,评价混合动力系统的节油潜力时,需要确定相应的能量管理策略,测试其在复杂工况下的燃油经济性表现。
目前,混合动力汽车的能量管理策略主要分为基于逻辑规则的控制策略和基于优化算法的能量管理策略。基于逻辑规则的控制策略具有实现简单、计算效率高等优点,但逻辑规则的设立依赖研发人员的经验,且移植性较差。赵利军等人采用不同的规则和算法,对混合动力系统工作区域和模式切换策略进行了优化。黄康等人将模式区分度作为优化目标,通过多目标粒子群优化算法改善了逻辑门限边界附近工作点过于密集引起的模式切换频繁问题,但该方法要求逻辑门划分合理,依赖于研究人员的开发经验。
基于优化算法的能量管理策略通过各种算法对目标函数进行优化,获得最佳的控制效果。隗寒冰等人根据动态规划算法的优化结果,提取动力总成的工作模式切换规则,应用于电量消耗-维持策略,改善了油耗和排放表现。赵治国等人通过遍历算法确定所有混合动力系统工作点的最佳工作模式,在新欧洲驾驶循环(New European Driving Cycle,NEDC)工况下,燃油经济性有所提升。林歆悠等人基于等效燃油消耗最小策略(Equivalent fuel Consumption Minimization Strategy,ECMS)算法获取各模式切换边界曲线,通过遗传算法对模式切换冲击度进行优化,在保持整车经济性的同时提高了模式切换品质。以上大部分方法均基于NEDC或类似的简单循环工况开展研究,随着能耗法规不断加严,需要将测试工况更换为速度变化更频繁、波动范围更大的全球统一轻型车辆测试循环(Worldwide Lightduty Test Cycle,WLTC)工况,现有的优化方法主要考虑油耗优化,对模式切换频度的关注不足,会导致工作模式频繁切换,大幅降低燃油经济性评价结果的可靠性。
本文以一款串并联式插电式混合动力汽车(Plugin Hybrid Electric Vehicle,PHEV)为研究对象,建立车辆动力学模型,通过ECMS 方法确定其在WLTC 工况下的模式切换序列,然后应用Radau 伪谱拼接法(Radau Pseudo-spectral Knotting Method,RPKM)求解最优模式切换时刻和油耗表现,改善因ECMS方法追求瞬时最优造成的模式频繁切换问题。
2 多模式混合动力系统模型
串并联式混合动力方案结合了串联和并联2种混合动力结构方案的优点,工作模式更多,动力源工作组合更全面,同时也增加了模式切换策略的优化难度。本文研究的串并联式混合动力系统结构如图1所示,发动机与起动∕发电一体化电机(Integrated Starter Generator,ISG)通过离合器串联,构成辅助动力单元(Auxiliary Power Unit,APU),与驱动电机通过减速机构并联,动力均经减速机构传递至驱动轮。
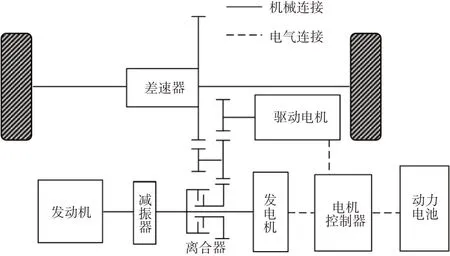
图1 串并联式混合动力系统构型
通过控制各动力源和离合器的工作状态,整车工作模式可分为纯电动模式、并联模式、串联模式和制动能量回收模式,其中并联模式包含了纯发动机工作模式。整车及动力系统主要参数如表1所示。
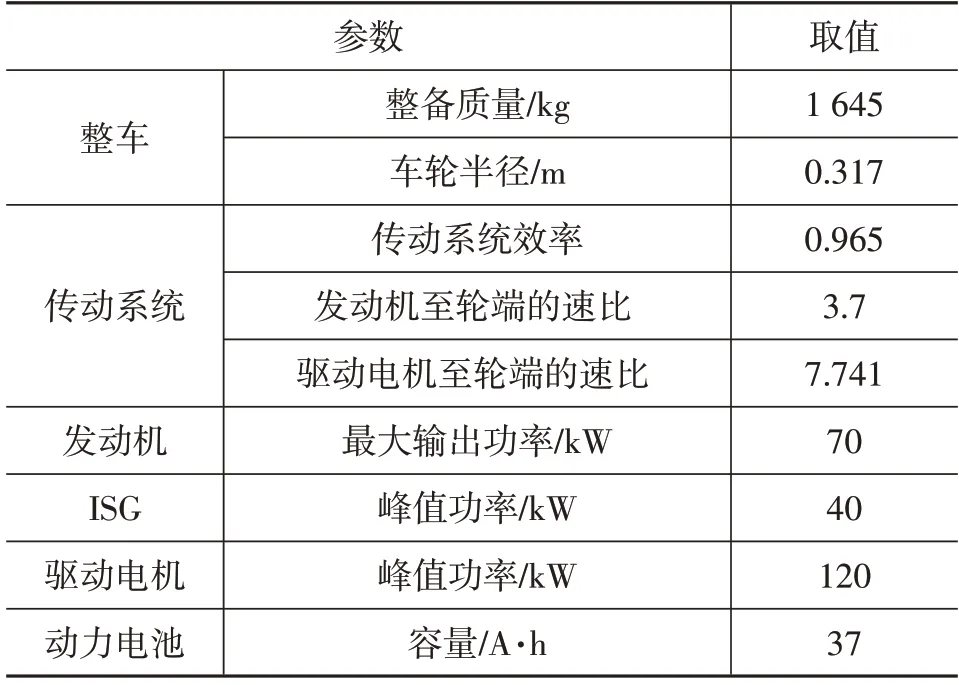
表1 整车及动力系统主要参数
为提高计算效率,各部件建模可采用后向建模方法,根据各系统部件的稳态响应,通过试验数据建立准静态模型。
2.1 工作模式
根据系统部件的启停状态,分为多种工作模式:
a.纯电驱动模式。此模式下,动力电池输出电能至驱动电机驱动车轮,适合车速较低、负载较小,且动力电池荷电状态(State of Charge,SOC)较高的工况,避免发动机运行在非经济区域。
b.串联驱动模式。此模式可以分为2 种情况:APU和动力电池混合驱动模式,即当行驶工况需求功率较大时,动力电池与APU 共同输出电能至驱动电机驱动车轮;APU 驱动兼充电模式,即当行驶工况功率需求较小时,APU向驱动电机供能的同时为动力电池充电。
c.并联模式。发动机和驱动电机通过扭矩耦合装置共同驱动车轮,适合在车速较大、负载较重且动力电池SOC较高的工况下启用。
d.再生制动模式。在汽车减速制动时分离离合器,驱动电机反转,利用制动转矩发电,为动力电池充电。
2.2 发动机模型
通过试验测定在不同工况点下发动机的输入和输出特性,记录发动机在不同节气门开度下的输出转速、输出转矩和瞬时燃油消耗率等,采用最小二乘法建立发动机的万有特性曲线,反映发动机的燃油消耗率与转矩、转速之间的函数关系,如图2所示。
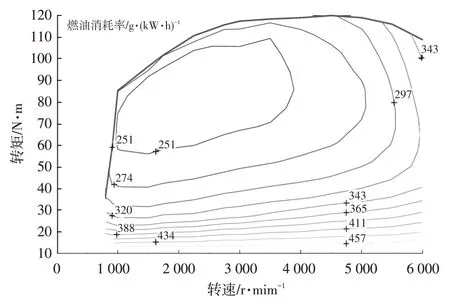
图2 发动机稳态特性模型
燃油消耗量通过对燃油消耗率积分获得:

式中,为燃油消耗量;为燃油消耗率;、分别为发动机输出功率和转矩;为发动机转速。
2.3 驱动电机和ISG模型
与发动机建模同理,忽略内部能量变化及动态响应过程,根据试验数据,建立驱动电机、ISG 不同输出转速、转矩下的效率模型,如图3和图4所示。

图3 ISG效率模型
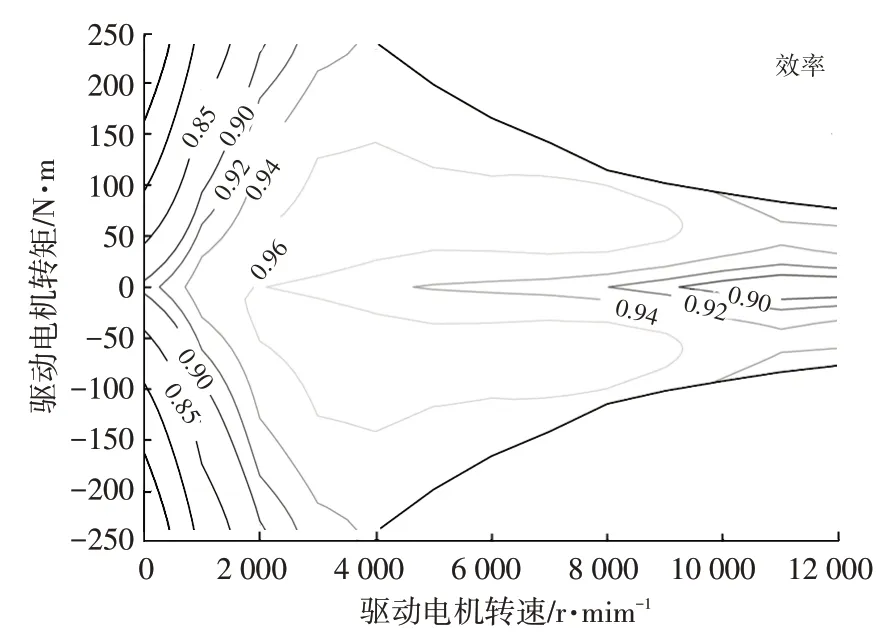
图4 驱动电机效率模型
2.4 动力电池模型
忽略动力电池内部复杂的电化学反应和外部温度影响,基于充、放电试验,将动力电池简化为等效内阻模型,等效电路如图5所示,其中,为动力电池的充、放电电流,为内阻,为开路电压,为负载电压。

图5 等效电路结构
不考虑温度等因素对电压、电阻的影响,认为电压仅受电池SOC 变化的影响,电阻受电池SOC 变化和充、放电状态的影响,动力电池的负载电压为:



式中,()为时刻的电池SOC 值;、分别为动力电池的额定容量和瞬时功率。
2.5 整车纵向动力学模型
只考虑车辆纵向行驶工况及其控制,忽略其横向运动及操纵稳定性影响,进行纵向动力学分析。车辆行驶过程中的行驶阻力包括滚动阻力、空气阻力、坡度阻力和加速阻力,汽车行驶方程可表示为:

式中,为驱动力;为车辆整备质量;为重力加速度;为路面阻力系数;C为空气阻力系数;为迎风面积;为坡度角;为汽车旋转质量换算系数,根据开发试验经验,取=1.05;为车速;d∕d为行驶加速度。
根据整车力矩平衡,可得力矩平衡方程为:

式中,为车轮半径;、分别为驱动电机和机械式制动器的输出力矩;、分别为发动机和驱动电机到轮端的速比;为传动系统效率。
3 基于ECMS的模式切换序列
ECMS 是通过建立动力电池电耗和发动机油耗的等效关系,将油耗和电耗转化为一个性能指标进行优化,本质是求解每一步长的瞬时最优油耗及其对应的模式和功率分配比,但逐步寻优容易陷入局部最优,不一定能获得整个测试工况下的全局最优解。
3.1 性能指标方程
将测试工况以1 s为步长划分成段,ECMS的性能目标可表示为:

式中,为测试工况下的总燃油消耗量;()为时刻发动机的燃油消耗量;()为时刻通过油电转换系数将动力电池电耗进行换算得到的等效燃油消耗量。
3.2 状态变量方程
以动力电池SOC 为状态变量,根据动力电池模型,状态转移方程用式(3)表示。
3.3 控制变量
控制变量为功率分配系数,代表动力电池输出功率占需求功率的比值,可表示为:
控制变量步长的选择会影响算法的精度和求解时间,本文控制变量步长选取为0.01。在制动能量回收模式下,以当前制动能量回收水平,回收效率一般不超过30%,此时分配比范围限制为0≤()<0.3。
为避免电耗的转换方式对结果产生影响,应保证SOC在测试工况始末一致,以总的燃油消耗量作为整车燃油经济性评价指标。因此引入二分法对全局油电转换系数进行调整,首先根据控制算法得到整个工况的SOC 曲线,通过比较始末状态SOC,对全局油电转换系数进行调整,然后采用控制算法重新获取SOC 曲线,直至始末SOC差值小于容许误差=0.001。
3.4 WLTC工况下模式切换序列提取
国家第六阶段机动车污染物排放标准中采用WLTC工况,其与NEDC工况的对比如图6所示。
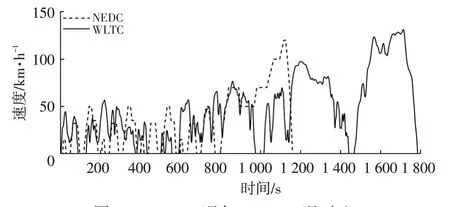
图6 WLTC工况与NEDC工况对比
相比NEDC 工况,WLTC 工况的行驶车速由稳态变化调整为瞬态变化,行驶工况不断波动。2种行驶工况的特征参数如表2 所示。可以看出,WLTC 工况下,加、减速工况占比增加,最高车速和最大加速度均有所提高,速度、加速度变化范围更大,测试更全面。

表2 行驶工况特征参数
WLTC工况下的全局油电转换系数为=275,ECMS算法下的整个混合动力系统的驱动状态工作点分布情况如图7所示,由于ECMS算法追求的是逐步油耗最优,因此图中存在明显的模式切换边界。低速工况下车辆采用纯电动模式,在中高速工况下,负荷较小时采用串联模式,负荷较大时采用并联模式。
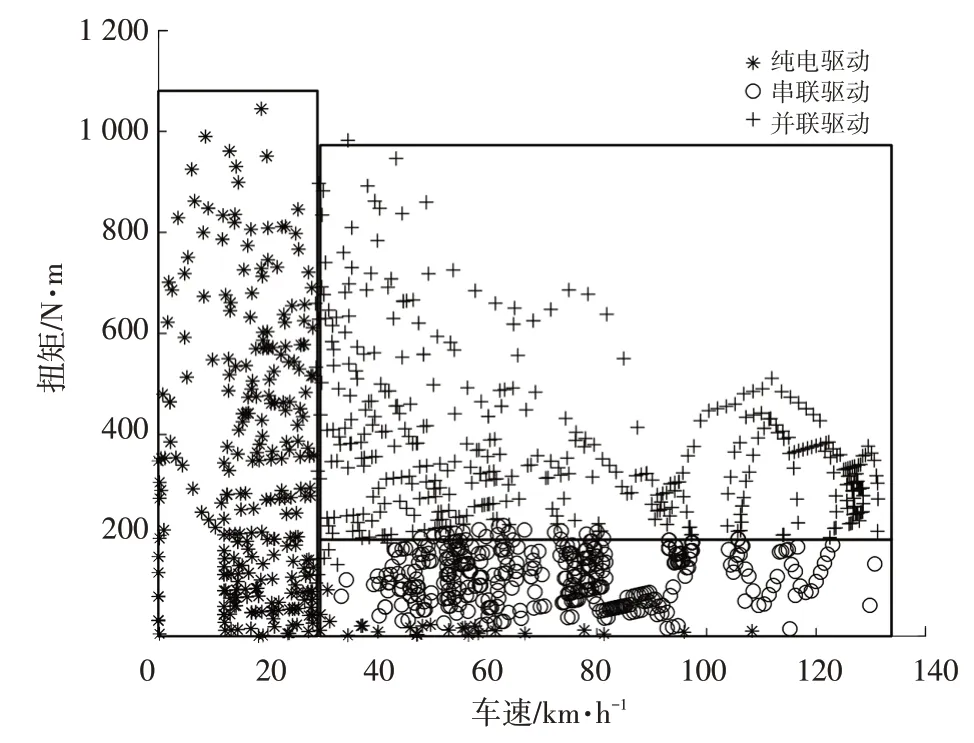
图7 驱动状态工作点分布情况
由于存在模式切换边界,随着测试工况更改为速度波动更频繁的WLTC工况,不可避免地会出现工作点围绕模式切换边界波动,导致模式频繁切换的问题,在实际行驶中大幅降低动力系统使用寿命和行驶平顺性,同时也会带来额外的油耗损失。
为改善ECMS 算法作为瞬时优化算法带来的模式频繁切换问题,可以ECMS算法结果为阶段及模式切换序列的划分依据,通过RPKM 求解各阶段优化结果,建立ECMS-RPKM算法,其流程如图8所示。对速度波动较小、ECMS算法下模式切换较平稳的阶段以及制动能量回收阶段,可不经RPKM优化。
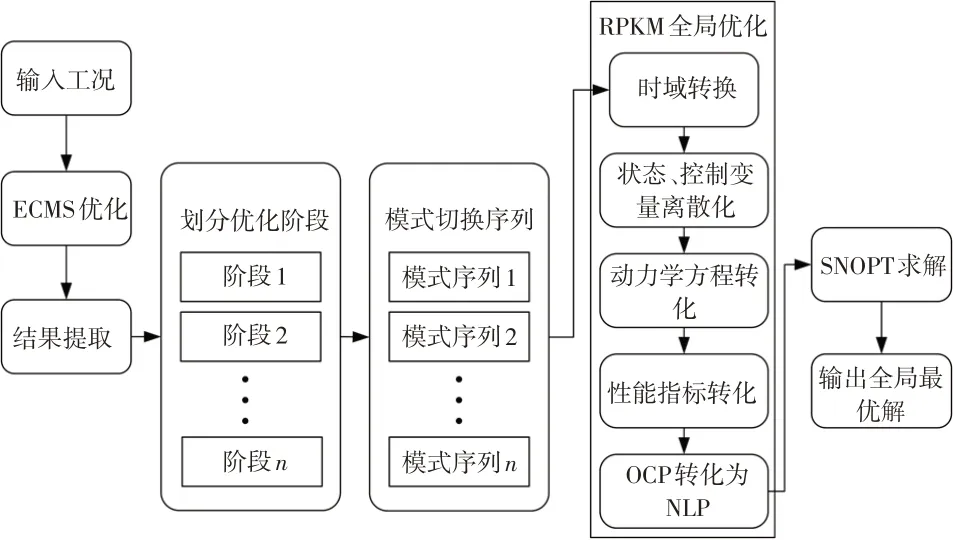
图8 ECMS-RPKM算法流程
根据ECMS 算法结果提取的WLTC 工况的模式切换待优化时间区域以及模式切换序列如表3所示。
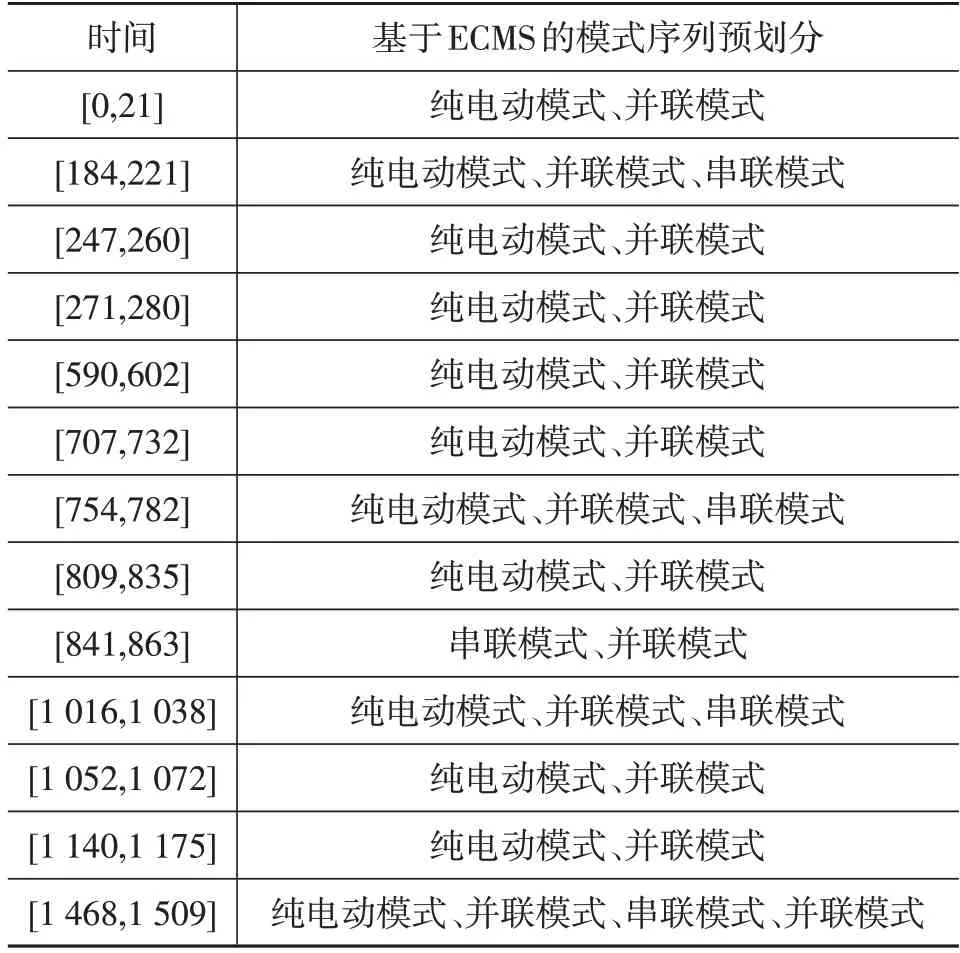
表3 WLTC工况模式切换待优化时间区域及序列 s
4 基于RPKM的全局优化
RPKM作为一种典型直接法,其原理是通过对最优控制问题(Optimal Control Problem,OCP)进行离散化并对控制变量和状态变量进行拉格朗日(Lagrange)全局插值多项式逼近,将原OCP 转化为非线性规划问题(Nonlinear Programming Problem,NLP)进行快速求解,能够得到多模式混合动力能量管理问题所属的博尔扎(Bolza)型最优控制问题的全局最优解。由于混合动力汽车在模式切换处出现控制函数、状态函数突变,为减少在突变点配点数过多引起的求解效率和求解精度下降问题,需将原非光滑的最优控制问题在不连续处,即ECMS各模式切换序列的始末时间点处,划分为不同段落,分段求解再拼接。RPKM需要预先划分模式序列,对各阶段始末状态变量进行估计预赋值,可根据ECMS结果给出。
4.1 时域转换
RPKM 采用勒让德-高斯-拉道(Legendre-Gauss-Radau,LGR)配点,配点所在区间为(-1,1],节点所在区间为[-1,1]。首先根据ECMS 获得的模式切换待优化序列,将测试工况划分为个阶段,各分段点依次为,,…,T。接着将每个时间阶段[T,T]转换到勒让德(Legendre)正交多项式的定义区间∈[-1,1]:

4.2 状态变量和控制变量离散化
在第个时间阶段,选取LGR 配点数量为N,分别为阶Legendre 正交多项式P()的N个根(τ,τ,…,τ,),P()表示为:

取N个配点以及阶段初始时刻为节点,则第个时间阶段的节点数量为(N+1),节点记为τ,其中=0,1,…,N。在节点处将各阶段状态变量S()离散化为S,对各阶段控制变量分配比μ(),只需在配点处离散化为μ:
离散化后的状态变量和控制变量分别通过(N+1)和N个Lagrange插值多项式来逼近:
4.3 动力学方程转化
经过配点与离散化后,对状态方程求解一阶导数可得:

第个时间阶段的配点记为τ,其中=1,2,…,N。将式(10)、式(11)和式(14)代入式(8)可得:



结合式(3)、式(15)和式(16),OCP的动力学方程在第阶段配点τ处可以转化成代数方程:
式中,(τ)为在配点τ处电池输出功率,由工作模式和分配比确定。
4.4 性能指标转化
式(6)中性能指标包括发动机的油耗和动力电池的电耗,属于Bolza型性能指标,可转化为:

式中,为结束时间;、分别为动力电池的初始和结束时刻SOC。
对第阶段,将含有积分项的性能指标通过高斯-拉道(Gauss-Radau)积分方法可近似为:
4.5 最优控制问题转化为非线性规划问题
将各阶段拼接起来,即可将原混合动力模式最优控制问题转化为非线性规划问题,即
该非线性规划问题可通过SNOPT大型非线性求解器进行求解。
5 优化结果及分析
在WLTC 工况下,ECMS 算法与ECMS-RPKM 联合算法的最优状态变量和模式切换情况如图9和图10所示。其中模式0~模式4 分别代表停车、串联模式、并联模式、纯电动模式、制动能量回收模式。
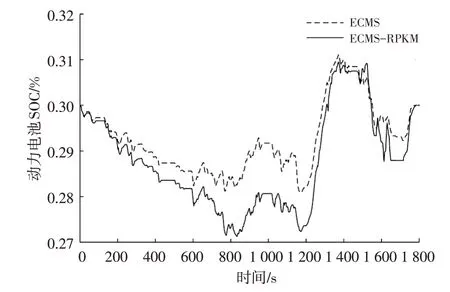
图9 2种算法的WLTC工况最优状态变量曲线
图10 中:在第1 015 s 前的中低速工况,ECMS 算法SOC 曲线变化较小,但该阶段发动机转速较低,充电效率较低;在第1 015~1 467 s 的高速工况区间,ECMSRPKM联合算法下动力电池SOC上升较多,充电主要集中在第1 200~1 330 s区间,此时车速较高且载荷相对稳定,ECMS-RPKM 联合算法通过串联模式进行充电,效率较高;第1 467~1 790 s 的超高速工况下2 种算法的SOC 曲线变化趋势相似。从图10 中可以看出,ECMSRPKM算法下各模式切换次数明显减少。
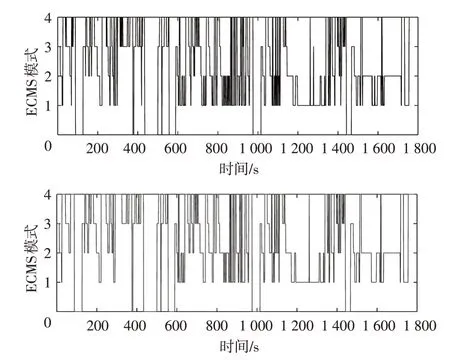
图10 WLTC工况模式切换对比
ECMS 和ECMS-RPKM 联合算法控制下的发动机和驱动电机工作点分布分别如图11和图12所示。
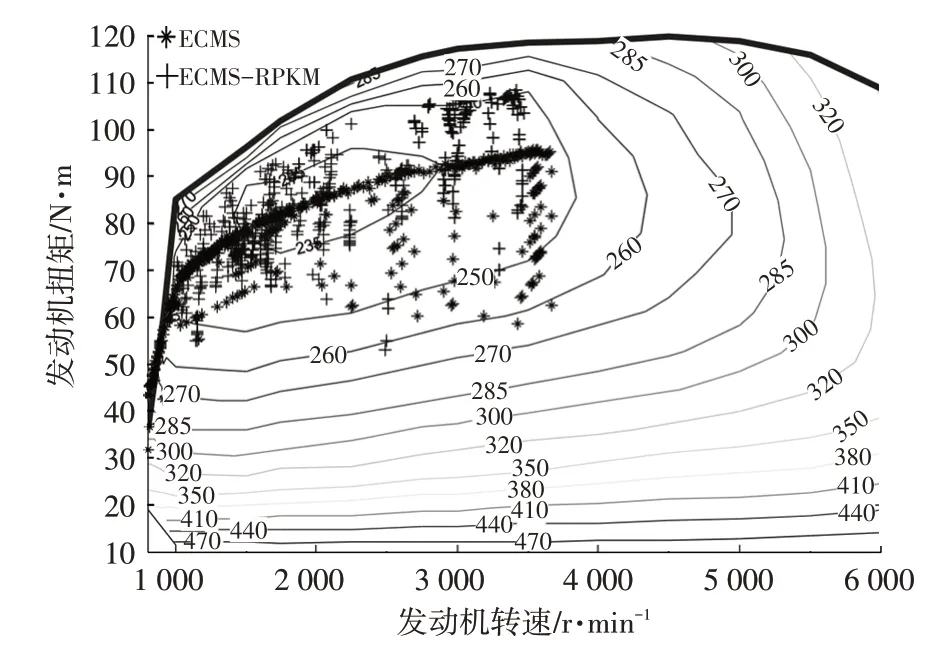
图11 发动机工作点对比
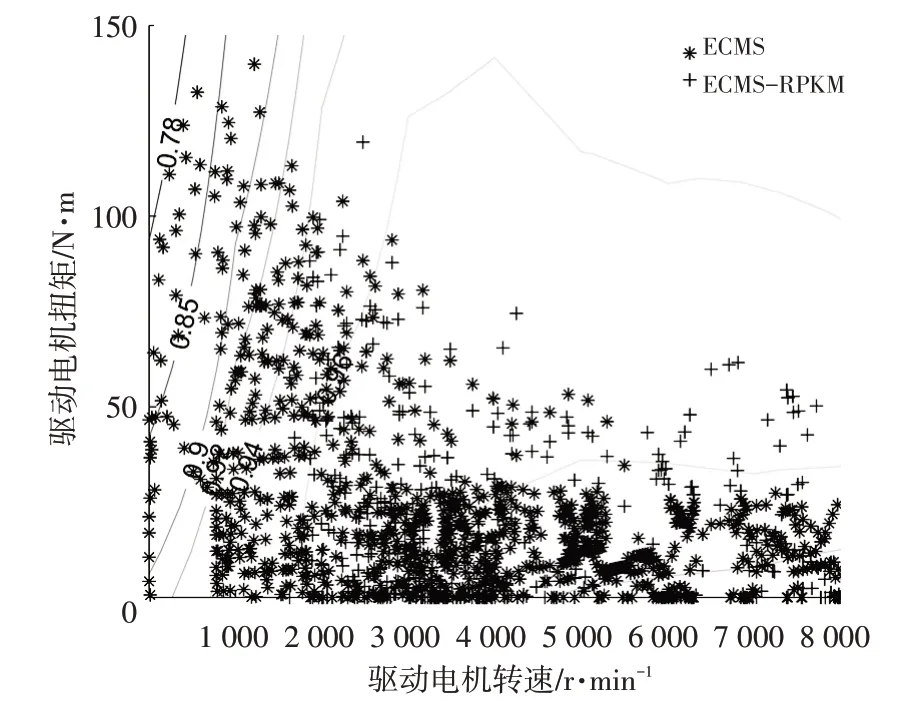
图12 驱动电机工作点对比
图11、图12 的分析结果与上述对SOC 变化曲线的分析结果一致。ECMS 算法在低速和中速工况下发动机工作点较多,且分布集中,说明中低速下主要采用串联模式,能量在发动机和动力电池之间多次转换,能量损失相对较多。在ECMS-RPKM 联合算法控制下,中、低速工况充电频率较低,发动机主要运行在并联模式,在高速工况下积极使用发动机发电为动力电池补充电能。因此ECMS-RPKM 联合算法对燃油经济性的评价结果比ECMS算法更合理,可以作为混合动力系统节油潜力的评价依据。
在保证燃油经济性评价可靠性的同时,ECMSRPKM 联合算法还改善了ECMS 算法作为瞬时优化算法时只追求单步最优解而出现的模式切换频繁问题。ECMS-RPKM联合算法控制下混合动力系统的工作点分布如图13 所示。与ECMS 算法明显的模式切换边界不同,ECMS-RPKM联合算法控制下各模式工作点的边界出现重叠区域,作为模式切换的缓冲区,见图13。
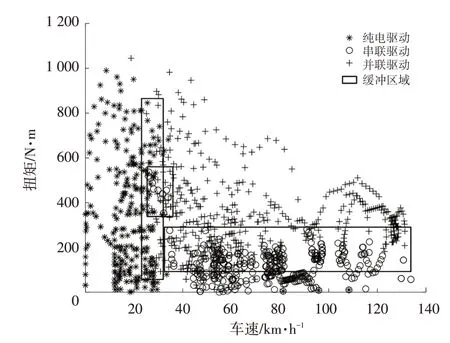
图13 ECMS-RPKM算法下工作点分布
当工作点在缓冲区波动时,ECMS-RPKM联合算法下车辆模式可维持不变,避免模式切换频繁,各缓冲区具体工作范围如表3所示。
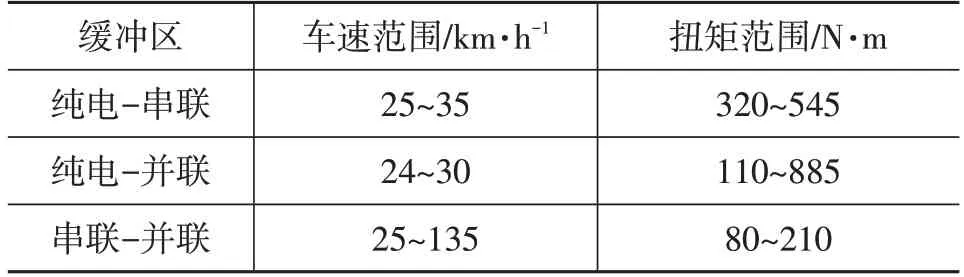
表3 缓冲区工作范围
2 种算法的求解结果对比如表4 所示。ECMSRPKM 联合算法在模式切换缓冲区间内维持模式不变,虽然导致瞬时油耗存在一定程度的升高,但通过全局优化得到的油耗仍低于ECMS 算法,燃油经济性提高了1.23%。同时,ECMS-RPKM 联合算法控制下发动机的起停次数和离合器的分离与接合次数明显降低,大幅改善了模式切换频繁问题。
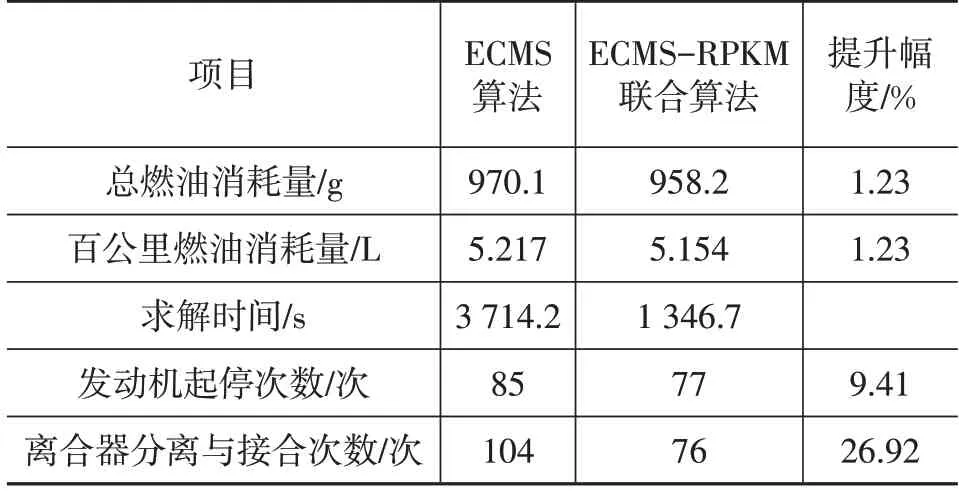
表4 2种算法求解结果对比
6 结束语
本文以一款串并联式混合动力汽车为研究对象,根据ECMS 算法的优化结果,提取WLTC 工况下的模式切换序列,应用Radau伪谱拼接法对具体模式切换时刻和功率分配比进行优化,获得WLTC 工况下最优模式控制策略和油耗表现。根据仿真结果分析,该ECMSRPKM 联合算法可有效改善ECMS 算法在WLTC 工况下的模式频繁切换问题,发动机起停次数和离合器的分离与接合次数分别降低9.41%和26.92%。同时,通过该方法可获得整个工况下的全局最优解,燃油消耗量相比ECMS 降低1.23%,求解时间较短,可作为复杂工况下多混合动力系统节油潜力的评价方法,满足车型快速开发需求。
