基于壁面加热功率回归模型的车用电子水泵控制策略研究*
2022-02-24李嘉轶邢叶荣徐元利孟祥飞
李嘉轶 邢叶荣 徐元利 孟祥飞
(1.天津科技大学,天津 300222;2.山西大同大学,大同 037009;3.天津市轻工与食品工程机械装备集成设计与在线监控重点实验室,天津 300222)
主题词:电子水泵控制策略 混合动力汽车 AMESim 不确定延迟 非线性回归分析
1 前言
随着汽车电动化趋势的发展,电气化、智能化的冷却系统在降低油耗、减少排放等方面具有很大作用。传统的机械水泵通过皮带与发动机曲轴耦合在一起,导致水泵转速与发动机转速始终呈正比,无法主动调整冷却能力,而电子水泵不受发动机转速的约束,可以灵活地控制水泵转速。发动机水温的变化为纯滞后系统,基于单一的温度反馈控制水温效果不佳。因此,研究电子水泵的控制策略具有重要意义。
目前,电子水泵的控制方法主要有PID 控制、模糊控制、模型预测控制(Model Predictive Control,MPC)和自适应控制。传统的PID控制在工业中应用最广,但具有响应速度慢的缺点。模糊控制在非线性、滞后系统上具有优势,尤其适用于温度控制。MPC 能够根据系统当前时刻的输入预测未来的输出,具有良好的跟踪性和抗干扰能力。自适应控制可以在运行过程中自动调整参数或控制规则,提升系统的动态性能。Ou等设计了模糊控制器对燃料电池温度进行实时控制,结果显示,该方法不仅可以降低外部负载的扰动,还可以提高电池输出功率。杨鸿镔等采用发动机MAP前馈+模糊控制反馈的方法在GT-SUITE 和Simulink 中联合仿真,结果显示,此方法可以提高温控精度并降低附件能耗。吕良等在燃烧室传热动力学模型基础上设计扩张状态观测器补偿建模误差,同时引入史密斯预估器对温度传输延迟进行补偿,结果表明,此控制系统在瞬态工况下的控制精度显著提高,具有较强的鲁棒性。综合目前的研究动态,基于整车模型开展的电子水泵控制策略和温控效果对整车性能影响方面的研究工作较少。
基于此,本文提出一种基于温差的PID控制与发动机壁面加热功率回归模型补偿的电子水泵控制策略,首先通过对发动机当前工况发热量影响因素进行分析,确定相关变量并建立多元非线性回归模型,然后根据仿真数据使用最小二乘法对模型进行拟合以求出相关变量的系数,作为当前工况补偿的散热量,控制水泵提前对冷却能力进行调整。最后,在AMESim整车模型基础上建立冷却系统模型并进行仿真分析,验证所提出策略的有效性。
2 电子水泵控制策略数学模型分析
温度是反映发动机热负荷状态的重要指标,为了保证发动机正常工作,水温传感器实时监测发动机冷却液温度,整车控制器(Vehicle Control Unit,VCU)对水温信号进行分析计算,判断温度是否正常,并控制冷却系统中的电子水泵、电子节温器工作,使发动机处于最佳温度状态。
2.1 基于温度偏差标定的控制策略
基于温度反馈的电子水泵通过当前水温与理想温度的偏差匹配相应的冷却能力,常采用逻辑控制或PID控制。电子水泵的流量决定了整个冷却系统的散热能力,而流量与转速成正比,因此只需调整水泵电机转速即可实现水温控制。对于同一台水泵来说,流量与转速的关系遵循离心泵相似定律:
式中,、分别为水泵原型和模型的流量;、分别为水泵原型和模型的叶轮直径;、分别为水泵原型和模型的转速;、分别为水泵原型和模型的容积效率。
工作时,水温传感器的模拟信号通过调制解调器转换为数字信号后,通过CAN网络发送给VCU,VCU将此信号与储存的理想温度特性曲线进行对比,得到此时实际温度与目标温度的差值,再经过基于温差标定的调速曲线计算可得出水泵电机的目标转速,最后控制水泵实现冷却功能。
2.2 壁面加热功率回归模型的建模
本文在电子水泵PID 控制基础上提出一种加热功率回归模型补偿的方式,当温度上升到最佳工作温度区间后,除了按照既定的目标温度输出水泵转速外,还要根据当前工况的产热量补偿一部分散热能力,减少延迟导致的水温波动。
首先对影响当前工况产热量的相关因素进行分析,确定相关变量并建立多元非线性回归模型,再使用最小二乘法用仿真数据对模型拟合求出相关变量的系数,以此作为电子水泵补偿策略的数学模型。
2.2.1 相关变量分析
电子水泵优化控制策略需要的总散热量为:

式中,为基于当前温度与目标温度偏差标定的散热量;为基于当前工况需要的散热量,主要由燃烧室对壁面的加热功率决定。
与有关的因素有很多,如发动机转速、车速、环境温度等。这些参数与呈非线性关系,且很难用数学方程进行准确描述。相关文献中已有对加热功率的模型的总结,但仅是根据工程经验确定与之相关的特征变量。
Heywood对传统发动机建立的模型可表示为:

式中,为单位时间喷油量;、为待估计的参数。
Zhou等人将表示为发动机转速和扭矩的函数:

最后,吕良等人根据传热学原理对发动机循环过程进行分析,得出功率主要受发动机单位时间喷油量及转速的影响较大:

因此,结合工程经验和原理分析,本文以、作为燃烧室对壁面的加热功率的相关变量。
2.2.2 回归模型计算
借鉴相关文献中的回归模型并进行分析和简化后,获得一种符合度较高的回归模型:

式中,、、、为待估的参数。
对数据的分析通过将AMESim 中一款混合动力汽车模型(图1)在全球轻型汽车测试循环(World Light Vehicle Test Procedure,WLTC)工况下的发动机转速和燃料消耗率等相关变量的数据导出,作为自变量进行曲线拟合,变量数据如图2、图3所示。
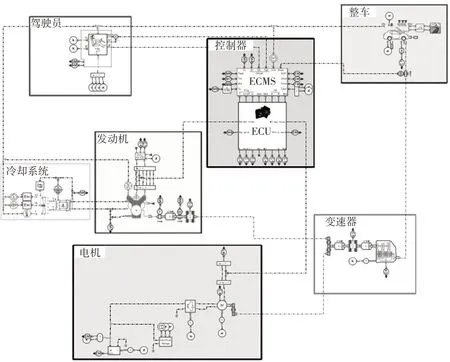
图1 整车动力学模型
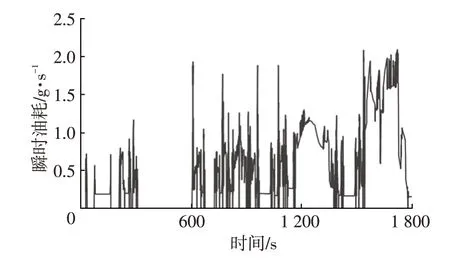
图2 瞬时燃油消耗量
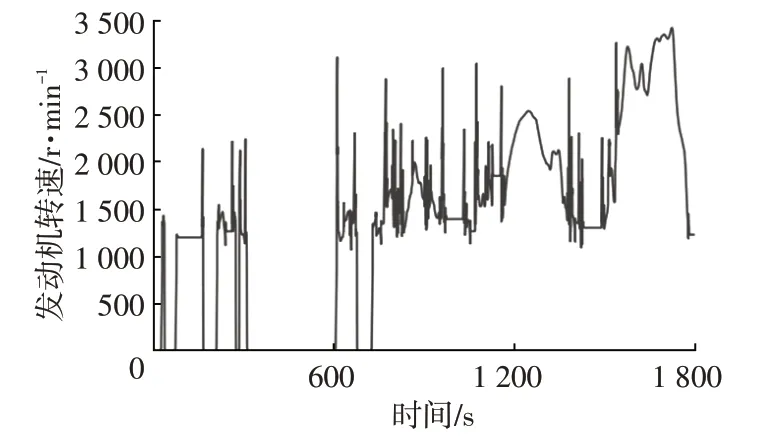
图3 发动机转速
加热功率与发动机水温吸收的热量和时间的关系为:

而吸收的热量为:

式中,为物体比热容;为物体质量;为温度的变化量;为热效率。
所以:

式中,、分别为初始时间和结束时间。
其中,、为固定参数,因此可以在整车模型中使发动机采取自然升温的策略进行仿真,此情况下的温升曲线如图4所示,其与加热功率对时间的积分曲线变化趋势相同,因此可以导出温升数据作为Δ进行分析。在SPSS统计分析软件中对导入的数据进行非线性回归分析,使用最小二乘法拟合回归模型得到各自变量系数的取值为:=2,=4 414.6,=389.1,=0.59,=206.4。

图4 发动机自然温升曲线
迭代过程和参数计算结果如表1、表2所示,运行在7次迭代后停止,并找到最优解。拟合优度作为回归模型的拟合效果度量指标,其取值范围为0~1,越接近1说明回归模型的拟合程度越高,其定义为:
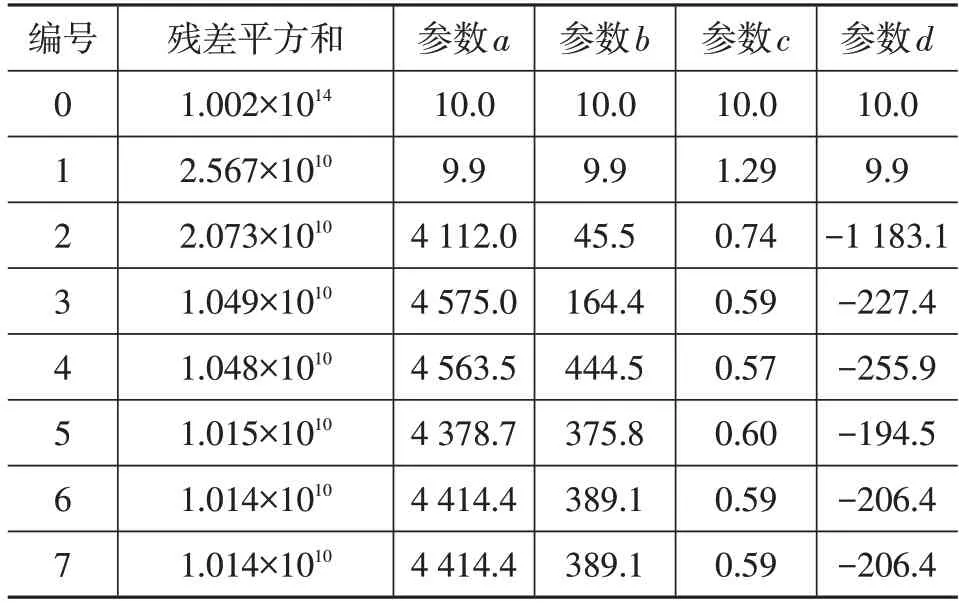
表1 迭代历史记录
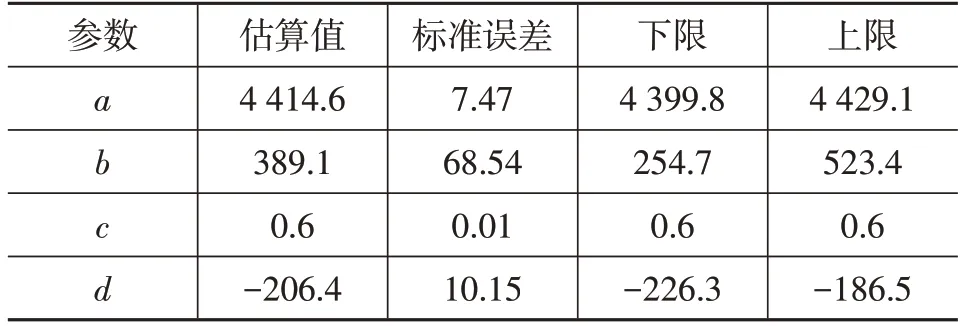
表2 参数估算值

式中,为残差平方和;为修正平方和。
=0.994>0.95,说明其拟合程度较高,因此燃烧室对壁面加热功率的回归模型为:

3 AMESim仿真模型的建立
确定完成电子水泵控制策略的数学模型后,需要在AMESim中建立整车模型以验证效果。
3.1 整车动力学模型
在搭建冷却系统模型前,首先在AMESim中搭建如图1所示的P2构型混合动力汽车模型,主要包括整车、驾驶员、发动机、电机、变速器和电子控制单元几大部分。建模的主要思路是:驾驶员模型通过控制油门踏板和制动踏板,将油门、制动、换挡信号传递给控制器,控制器分析处理后对发动机、电机和电池的动力输出进行控制。整车和动力部件的主要参数如表3 所示,其中Velocity.data为WLTC的车速控制文件。

表3 整车动力学模型参数
整车控制策略模型采用等效燃油消耗最小策略(Equivalent Consumption Minimization Strategy,ECMS),该策略是一种瞬时优化方法,根据每一时刻车辆的需求扭矩合理分配发动机和电机的输出扭矩,使得发动机的燃油消耗量与电机消耗电量的等效燃油消耗量之和最小,如图5所示。等价因子为耗电量与燃油消耗量间的转化系数,因此,该控制器的目的就是寻找最优的等价因子,从而实现发动机和电机的最优转矩分配。
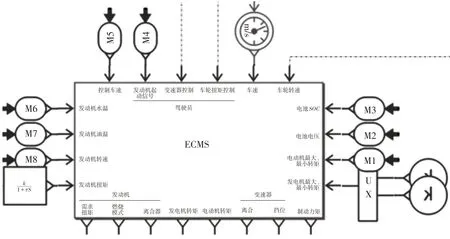
图5 整车控制器模型
系统瞬时总燃油消耗率()为:

式中,()为发动机的瞬时燃油消耗率;()为油电等价因子;()为动力电池输出功率;为汽油低热值。
3.2 冷却系统模型
3.2.1 冷却系统建模
针对整车模型中的发动机、电机和动力电池模型的热交换接口建立冷却系统模型。它们的最佳工作温度范围各不相同,因此,本文针对发动机、电机和电池选择独立液冷的方式进行冷却,通过液体流过内壁产生对流换热将热量带走,达到冷却的效果。冷却系统模型如图6所示,主要包括电子水泵、节温器、水温传感器、膨胀水箱、散热器、风扇等6 个子模型,部分子模型的参数设定如表4所示。
表4 冷却系统模型参数
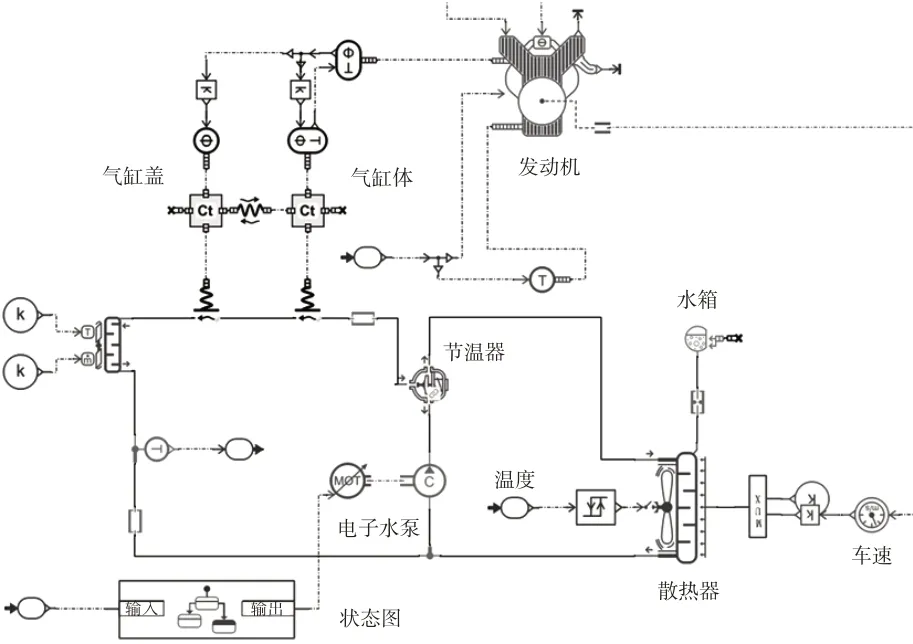
图6 冷却系统模型
电子水泵在90 ℃前缓慢怠速,随着温度的上升逐渐提高转速,加大冷却效果。节温器、电子风扇和电子水泵的相关温度设定都是为了在发动机达到最佳工作温度前减少散热量、缩短暖机时间。另外,电子风扇的功率比电子水泵小,因此在调节水泵前调节电子风扇可以节约能耗。
3.2.2 冷却系统控制策略建模
本文采用基于温差的PID 控制、模糊PID 控制、PID+回归模型控制3种策略进行对比,其中PID控制在AMESim 中可直接应用。模糊PID 控制需要在Simulink中建立模糊控制器进行联合仿真。如图7 所示,模糊PID控制器由传统PID控制器与模糊控制器相结合而成的。模糊控制器通过输入温差和温差变化率,输出PID参数增量比例Δ、Δ、Δ至PID控制器,从而实时调整PID 控制器的3 个参数。首先根据经验选定隶属度函数对温差及其变化率进行模糊化得到输入量,然后根据制定的模糊规则推理出增量系数的模糊值,最后反模糊化得到增量系数的确定值。
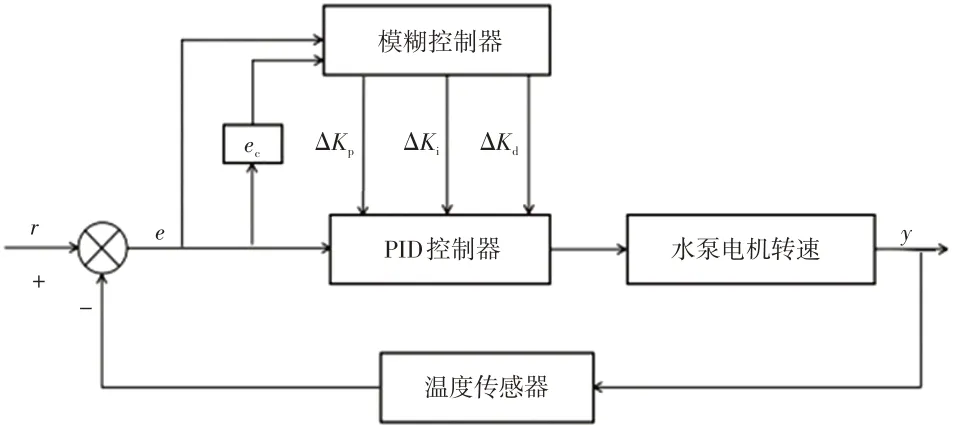
图7 模糊PID控制原理
电子水泵的模式切换方法采用AMESim 中自带的状态图(Statechart Diagram)工具,如图8 所示。状态图工具基于有限状态机理论,提供了图形化的环境表示有限个状态以及在这些状态间的转移和动作等行为的数学模型。以温度传感器信号、发动机转速信号和瞬时油耗等实时信号作为状态图的输入,以温度作为逻辑门限条件划分水泵的工作模式,最后按前文分析的控制策略的函数模型控制电机的转速。
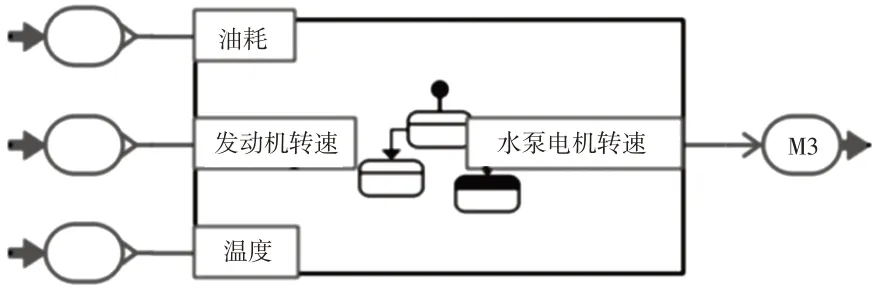
图8 水泵模式切换状态
4 仿真结果与分析
在整车模型上搭建冷却系统模型后,设置环境温度为20 ℃,在WLTC工况下进行仿真,验证模型及控制策略的正确性。
图9~图12 所示为车速、动力电池荷电状态(State Of Charge,SOC)电机需求转矩和电池、电机温度变化曲线。由图9 可以看出,需求车速与实际车速曲线重合,说明车速的跟随状况良好。图10 显示,动力电池由90%降至86%,变化范围不大,有利于延长电池的使用寿命。由图11可知:需求转矩为正时,车辆处于电机助力模式,需求扭矩为负时,则处于制动能量回收模式;车辆刚起动时,电机对发动机进行助力,使发动机工作在高效区域;1 700 s 后,电机需求转矩为负,此时电机进行能量回收,为电池充电,使有所上升。
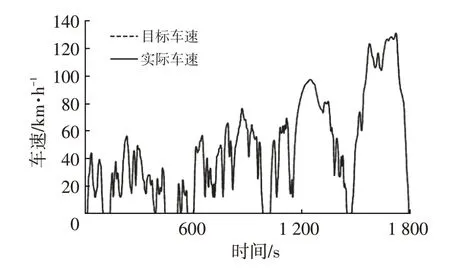
图9 WLTC工况车速
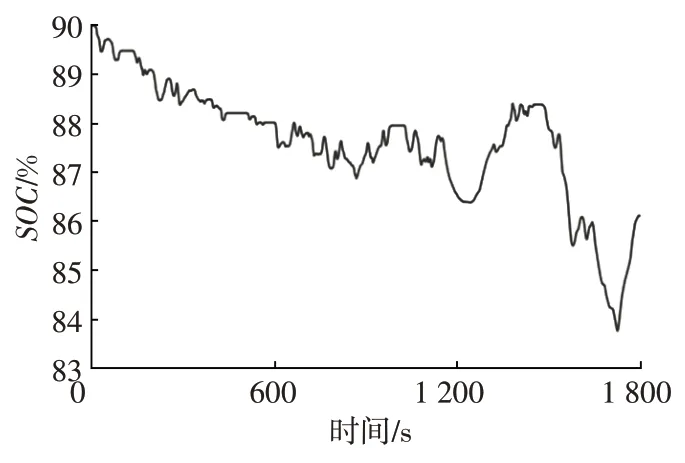
图10 动力电池SOC变化曲线
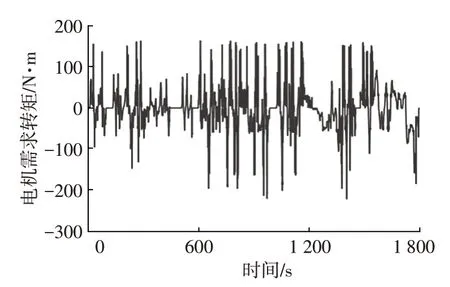
图11 电机需求转矩
由图12可知,在WLTC工况的1 800 s中,温度一直呈上升状态,始终未达到各自的最佳工作温度范围,因此冷却系统无需对温度进行调节,也就无法验证策略的优越性。
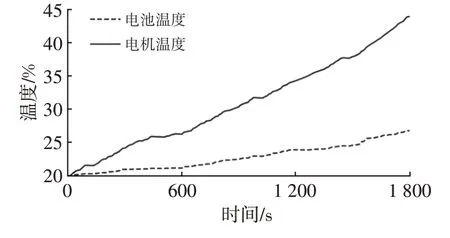
图12 电池、电机温升曲线
图13、图14 所示为电子水泵在3 种控制策略下的散热器水温变化曲线和电子水泵的转速变化曲线。前期的暖机阶段节温器未开启,因此冷却液没有流经散热器,且电子水泵也处于100 r∕min的低转速怠速状态,缩短暖机时间。由图10和图2的车速曲线和发动机转速曲线可以看出,在第1 200~1 300 s 时间段内,发动机已经处于高负荷状态,因此基于PID 控制的水温在第1 200 s 后产生了较大的波动。模糊PID 控制下的水温振荡有所减少,证明了其在不确定系统上具有更好的适用性。而基于PID 控制+壁面加热功率回归模型的控制策略从第1 200 s前就开始根据工况补偿一部分水泵转速,以提高冷却效果。事实证明,相较于PID 控制和模糊PID 控制,此策略具有更好的跟踪性和抗干扰能力,能明显减少水温的波动,且电子水泵的转速变化也较其他策略更平稳,减少了转速变化幅度过大带来的冲击。
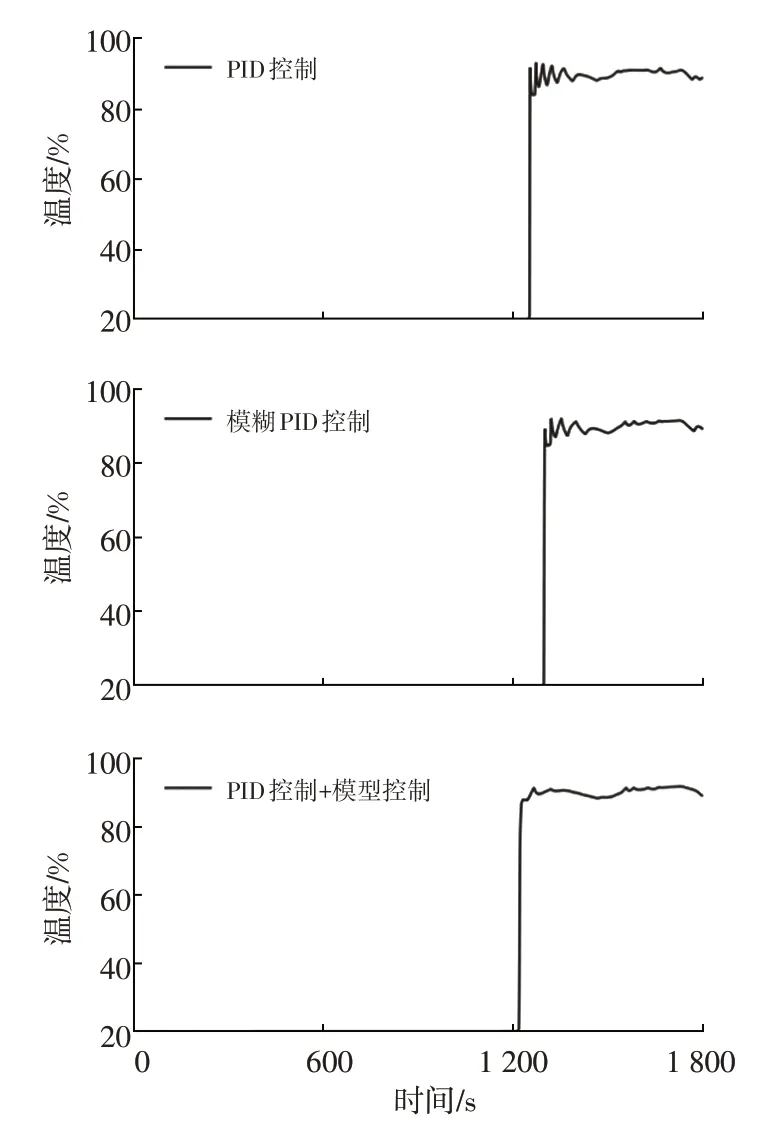
图13 发动机散热器出口水温对比
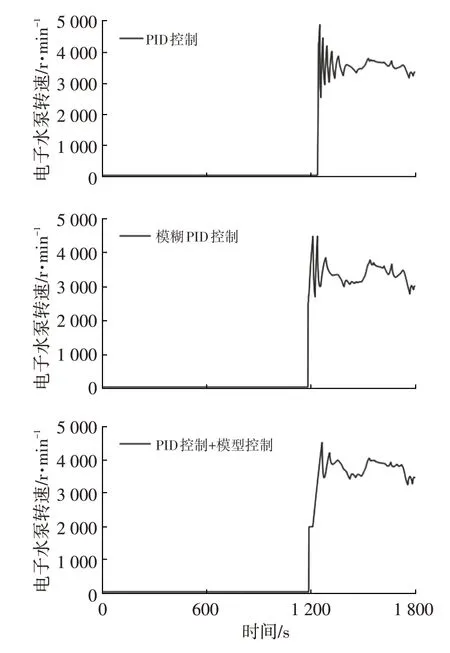
图14 电子水泵转速变化对比
3种策略下的燃油经济性、污染物排放和动力表现仿真结果如表5 所示,CO排放量和0~100 km∕h 加速时间差别不大,而PID 控制+壁面加热功率回归模型控制的燃油消耗量相较于PID 控制下降了0.4%左右,另外,由于在WLTC仿真工况中,发动机大部分时间在暖机升温,且电机和动力电池始终未达到需要冷却的温度,因此在长时间的实车测试中预计会有更好的表现。故基于温差的PID控制+壁面加热功率回归模型控制的电子水泵转速控制策略可以有效减少水温的波动,提升整车的经济性。
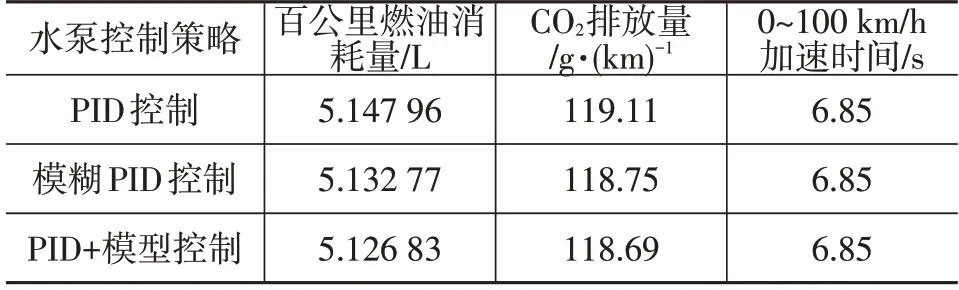
表5 整车性能对比
5 结束语
本文以某款混合动力汽车的电子水泵为研究对象,通过对发动机当前工况产热的影响因素进行分析,制定了基于温差的PID控制+壁面加热功率回归模型控制的电子水泵控制策略,并在AMESim仿真工具中建立相关模型进行验证,仿真结果表明,相比于单一的PID 控制和模糊PID控制,所提出的电子水泵转速控制策略可有效减少水温波动,实现了水温的平稳控制,避免了水泵转速变化冲击过大的现象,同时减少了0.4%左右的燃油消耗量,提升了燃油经济性,验证了策略的优越性,该策略可为进一步优化设计混合动力汽车的冷却系统提供参考。
