迷宫机器人外置磁编码器最优位置的确定
2022-02-08袁臣虎董佳丽周佳文米璐晗
袁臣虎,董佳丽,周佳文,米璐晗,闫 园
(天津工业大学 电气工程学院,天津 300387)
迷宫机器人可以在未知的迷宫中搜索并记忆迷宫路径,利用记录的迷宫信息规划出最优路径,实现由起点向终点的最佳移动[1]。迷宫机器人在智能避障过程中需要精准的速度与位置信息,因此直流电机的编码器反馈系统占有重要地位[2]。传统迷宫机器人通常采用价格昂贵的国外进口空心杯电机,导致迷宫机器人制作成本较高且难以积极有效的推广。为了降低迷宫机器人的制作成本,可采用外置电机的磁编码器来实现闭环控制。
如果将外置的磁编码器应用在迷宫机器人电机控制中,需要对永磁体与磁传感器之间的安装间距进行研究[3],国内外学者为设计磁编码器以及确定两者安装位置间距做了大量的研究工作。文献[2]提出一种基于GMR的磁编码器设计方案,通过有限元仿真找出气隙厚度与永磁体尺寸之间的关系,实验结果表明磁编码器在电机控制系统中位置检测的可行性,但未得出具体的气隙厚度范围。文献[3-4]为实现磁编码器信号稳定输出,对输入信号与处理过程进行理论分析并设计神经网络算法来提高精度。文献[5-8]通过对磁编码器的工作原理、通信协议、机械结构、软硬件介绍来完成磁编码器整体设计,实现电机输出位置角的实时检测。文献[9-11]研究了TMR传感器对磁场的影响,采用有限元仿真模拟编码器的磁通量分布以及与TMR传感器之间的距离效应,对比不同的永磁体材料对磁场分布的影响。
针对磁编码器与永磁体安装的具体间距问题,本文将从理论分析、有限元仿真、硬件与软件设计进行研究,首先对永磁体周围空间磁场进行理论分析,并利用ANSYS有限元仿真研究永磁体与磁传感器不同间距下的磁感应强度[4],从而得到最优的安装位置。磁编码器的硬件包括供电电源、磁编码器与STM32通信电路,软件包括计数器脉冲捕获以及增量式PID算法。通过实验表明在仿真获得的安装间距内可以实现电机闭环控制,验证了方案的准确性。
1 磁编码器工作原理
磁编码器根据工作原理分为霍尔效应和磁阻效应。基于磁阻效应的编码器检测范围广、灵敏度高、温度稳定性好,更适合微型电机控制。本设计采用磁阻效应的TLE5012B传感器,磁编码器安装与脉冲信号如图1所示。
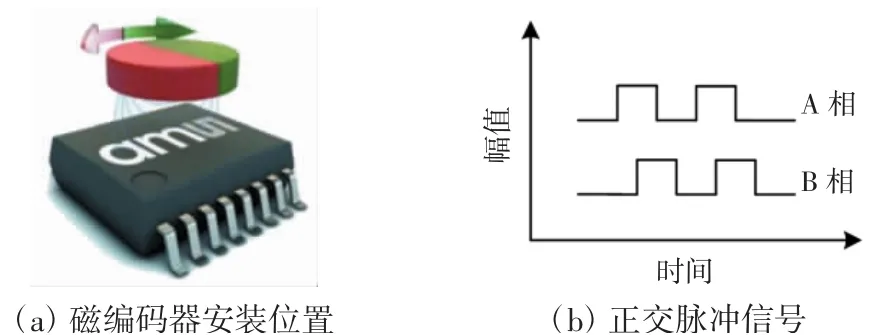
图1 磁编码器安装与脉冲信号示意图Fig.1 Schematic diagram of magnetic encoder installation and pulse signal
当磁传感器芯片检测电机转速时,需在磁传感器正上方安装一个圆柱形永磁体[5],如图1(a)所示,其工作原理是通过芯片内部的GMR传感器检测平行其表面360°范围内的磁场分布,根据磁场的变化可产生A、B两相正交脉冲信号,如图1(b)所示,当A相超前B相时,电机正转;反之,电机反转[6]。
2 磁编码器空间磁场分布
2.1 单对极磁场分布理论
磁偶极子磁场如图2所示。
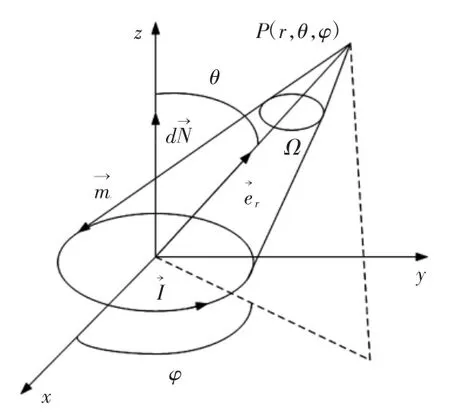
图2 磁偶极子磁场Fig.2 Magnetic dipole field
假设永磁体为半径R、厚度d并且由多个磁偶极子组合而成[7],其中磁矩为:

对于空间某点P(r,θ,φ)对该点的立体角Ω、磁位φm、磁感应强度为:
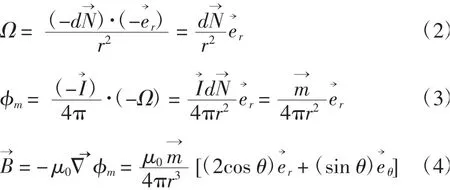
式中:μ0为空气导磁率。
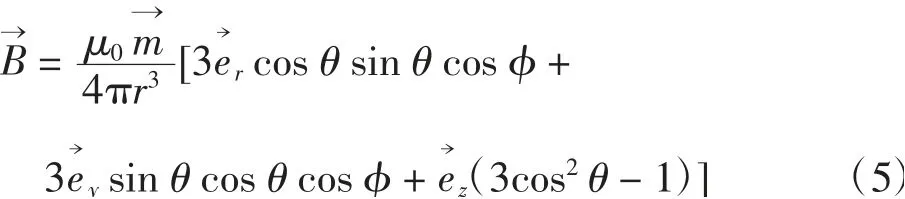
对永磁体X方向的磁感应强度积分,可得到永磁体沿方向的磁感应强度:

当永磁体围绕原点顺时针旋转时,相当于每个磁偶极子沿顺时针方向旋转,即环形电流转动一定角度[8],此时磁矩说明永磁体旋转过程中X方向的磁感应强度为正余弦变化[9]。
2.2 空间磁场的有限元仿真
为了保证磁传感器元件正常工作,磁传感器周围空间需要分布均匀的磁场[10],磁编码器机械结构设计如图3所示。
图3中,2个磁传感器芯片对称且垂直安装在PCB底板,保证磁传感器运行过程中的稳定性。另外永磁体平行磁传感器安装在轮内,轮子转动过程中磁传感器会感应磁场变化,实现稳定且精确的速度控制。
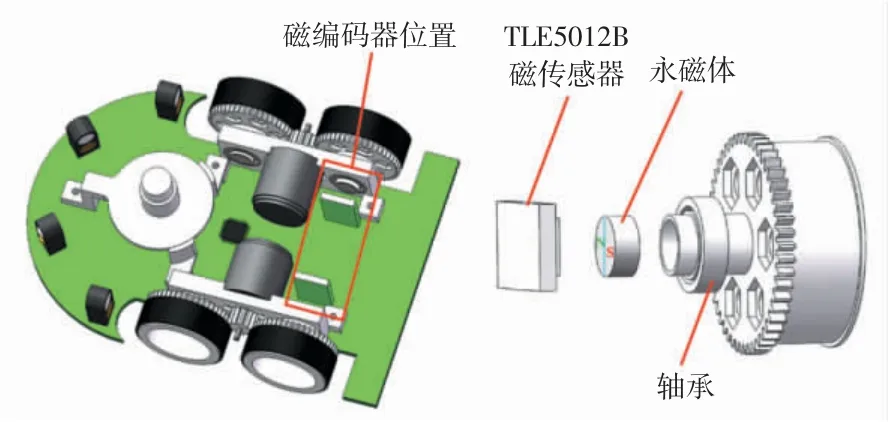
图3 磁编码器机械结构设计Fig.3 Mechanical structure design of magnetic encoder
TLE5012B磁传感器正常工作时其周围的磁感应强度范围为30~60 mT,为了创造这种工作条件,需要考虑永磁体的直径、厚度、材料。通过Ansoft Maxwell建立永磁体的三维模型并对磁传感器与永磁体的不同安装距离进行有限元仿真分析,确定两者最佳的间距。
2.2.1 建模及材料设置
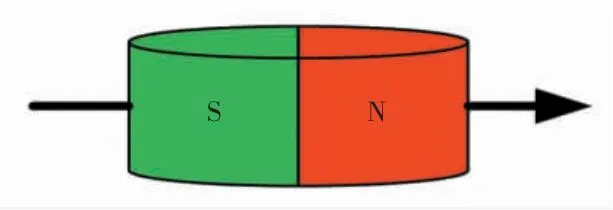
图4 径向充磁永磁体Fig.4 Radial magnetized permanent magnet
图4中,充磁方向为径向充磁。永磁体的直径6 mm、厚度2.5 mm、材料设置为钕铁硼[11],钕铁硼的技术参数如表1所示。

表1 钕铁硼主要技术参数Tab.1 Main technical parameters of NdFeB
2.2.2 边界设置及网格划分
永磁体边界选用长为10 mm、宽度为5 mm的矩形,采用手动划分网格[12],网格精度设置为1 mm。将永磁体模型设置为以Z轴为旋转轴进行旋转,转速设置为3 000 r/min,仿真步长为0.000 5 s[13],设置完成后进行分析自检。
2.2.3 仿真分析
将永磁体旋转速度分别设置为3 000、9 000 r/min,图5为三维仿真过程中永磁体磁密度云图和磁密度矢量图[14]。
根据颜色的不同可以看出磁密度分布情况,蓝色表示最低,红色为最高。从图5中可以看出,永磁体在某点处的磁密度强度降为mT级别,满足GMR传感器的测量范围。在瞬态仿真中选取距离永磁体的不同点,每隔0.2 mm长度仿真平行于永磁体的磁感应强度,如图6所示。
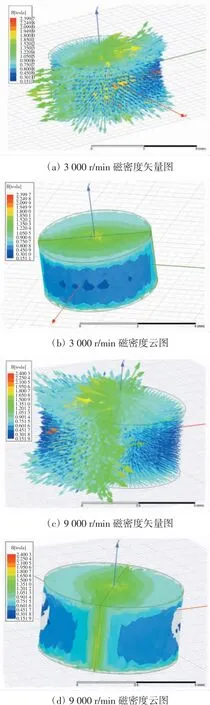
图5 三维磁场瞬态仿真Fig.5 Transient simulation of 3D magnetic field
根据图6仿真结果,通过比较某点在相同转速下不同距离的磁感应强度,可以看出距离永磁体越近,磁感应强度越强。当距离为2 mm时,其磁感应强度幅值为8 mT,距离为1 mm时,磁感应强度为80 mT。在永磁体旋转2个周期过程中,平行永磁体的磁感应强度满足正余弦规律[15]。
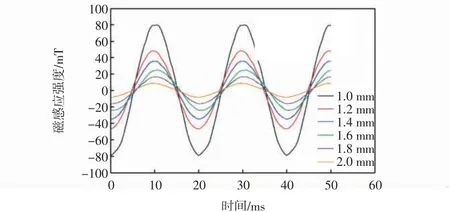
图6 不同间距下磁感应强度瞬态仿真示意图Fig.6 Schematic diagram of transient simulation of magnetic induction intensity at different intervals
由磁传感器的磁场工作范围来确定永磁体与磁传感器最合适的间距,磁感应强度与距离关系如图7所示。当距离为1.18~1.52 mm时磁感应强度在30~60 mT之间,磁编码器可以正常工作。
从表1中可以看出九甜粘一号的密度在3100株/667m2时产量最高。密度在2800~3100株/667m2之间时,随着密度的增加,产量也随之增加。密度在3100~4000株/667m2之间时,随着密度的增加,产量随之下降。处理2与其它处理之间差异显著,处理3与其它处理之间差异显著,处理1与处理4、处理5之间差异不显著。
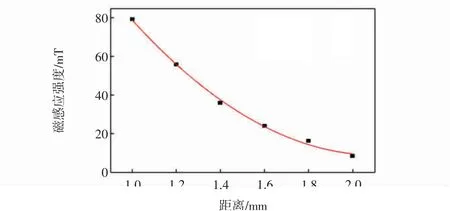
图7 磁感应强度与距离的关系Fig.7 Relationship between magnetic induction intensity and distance
3 硬件设计
TLE5012B支持多种通信协议[16],即SSC(同步串行通信)、IIF(增量接口)、PWM(脉冲宽度)、HSM(霍尔开关模式)等。通过寄存器配置实现不同协议的选择,每种协议根据指定的引脚可以设置为推挽或开放式,具体取决于外部电路。
本设计的磁编码器实现直流电机的闭环控制,TLE5012B被配置成IIF模式,其定义3个引脚IF_A、IF_B、IF_C。采用5V稳压芯片LP38691-5.0为TLE5012B提供电源,图8为电路设计。图8中,将引脚SNS与输出引脚VOUT连相连即可输出稳定的电压,引脚VIN与主电源相连。
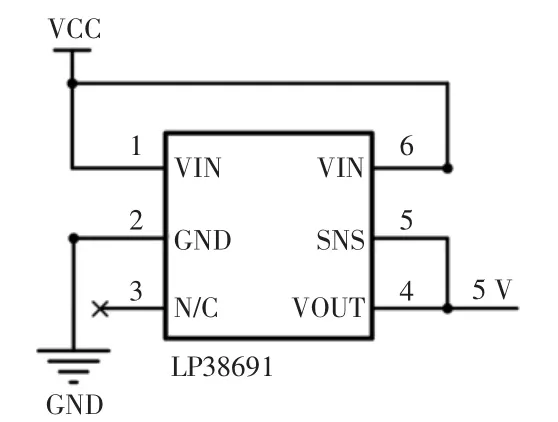
图8 5 V电源电路Fig.8 5 V power supply circuit
STM32与TLE5012B的接口电路如图9所示。
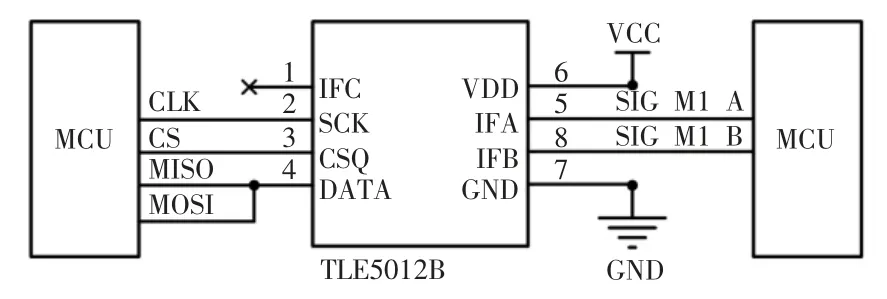
图9 磁编码器电路设计Fig.9 Circuit design of magnetic encoder
由图9可见,使用SSC协议与STM32的SPI接口进行通信,CLK与SCK相连为通讯提供时钟,CS与CSQ相连控制SSC的数据传输,MISO和MOSI同时与DATA相连,实现数据的双向传递。
4 软件设计
根据TLE5012B的IIF通信可以直接将正交脉冲信号输出,迷宫机器人的左右2个电机通过微控制器中的TIM2、TIM3定时器来完成输出脉冲计数[17],同时利用Systick定时器中断来获取计数值的预装载值与实际值的差值,即电机的实时反馈速度,如图10所示。
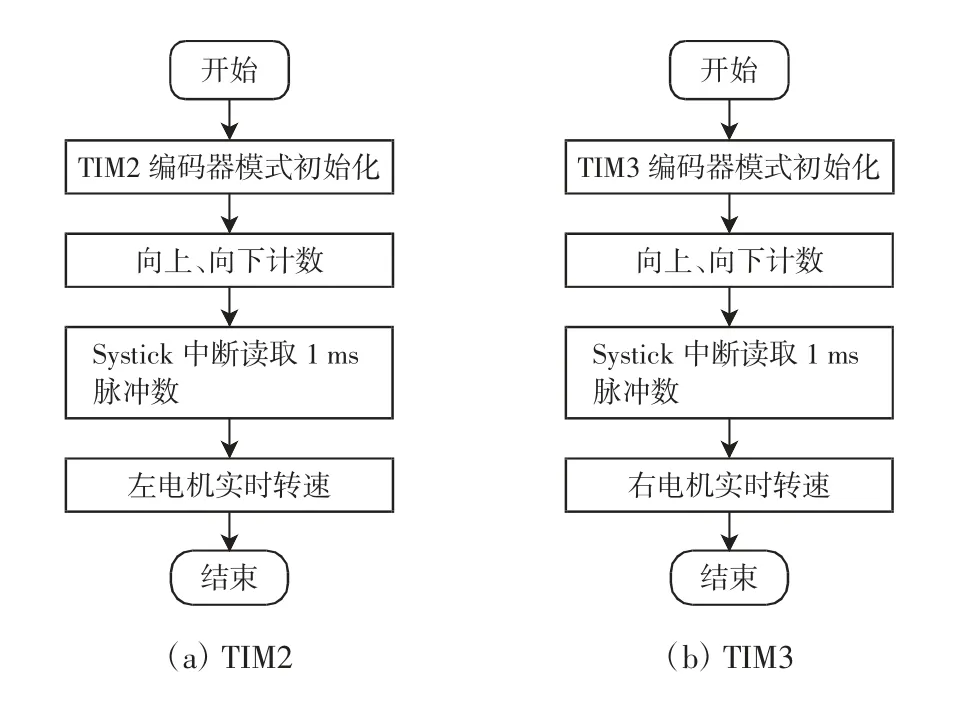
图10 磁编码器软件流程Fig.10 Flow chart of magnetic encoder software
迷宫机器人电机控制为增量式PID算法,在直线速度闭环中,首先根据设定的直线速度,在主控制器的Systick定时器中每1 ms读取磁编码器脉冲反馈值[18],将设定值与反馈值的偏差通过PID算法运算后作用到左右2个电机的PWM[19],最终实现速度闭环控制,图11为增量式PID算法的流程示意图。
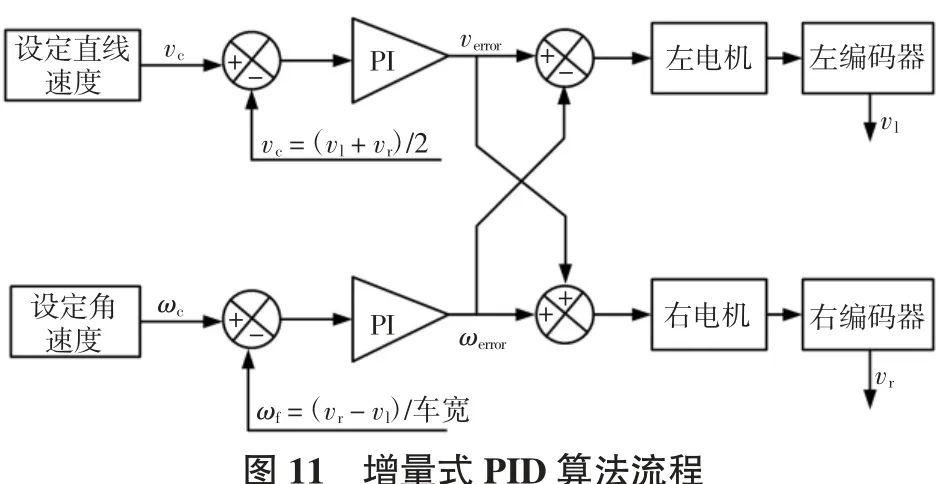
图11 增量式PID算法流程Fig.11 Flow chart of incremental PID algorithm
5 实验结果
图12为磁编码器实验平台。
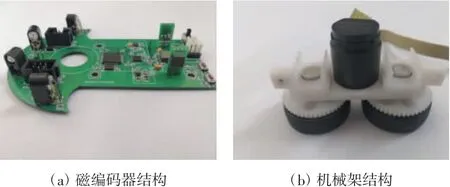
图12 磁编码器实验平台Fig.12 Experimental platform of magnetic encoder
图12中,为了使电机能够稳定地转动,将电机固定在机械架上,同时机械架固定在迷宫机器人PCB底板。电机、机械架、磁传感器芯片相对位置固定,为了起到固定和减小轮子轴与机械架之间的摩擦,加入轴承结构。当永磁体转动时GMR传感器可以检测其产生的空间磁场[20],经过信号的处理,最终转化成脉冲信号。
图13为增量接口(IIF)的磁编码器实验波形。
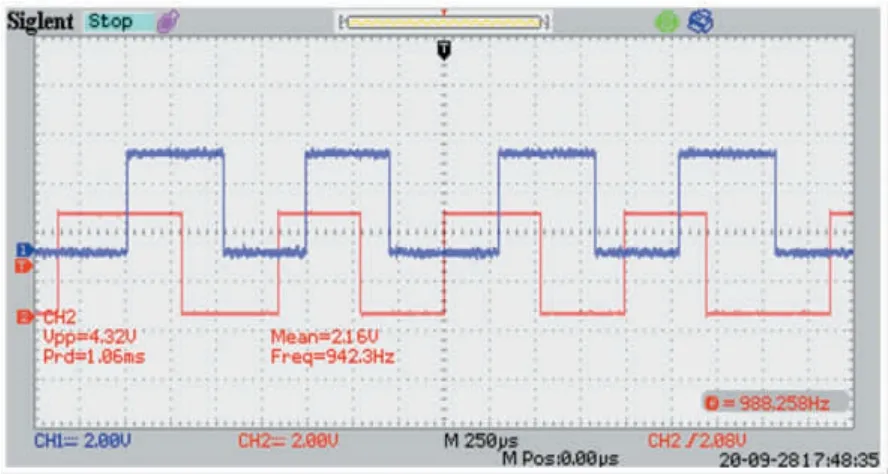
图13 增量式信号输出波形Fig.13 Incremental signal output waveform
图13表明A、B相差90°的信号输出,验证了磁传感器位置安放的正确性。图14为不同频率输出波形。
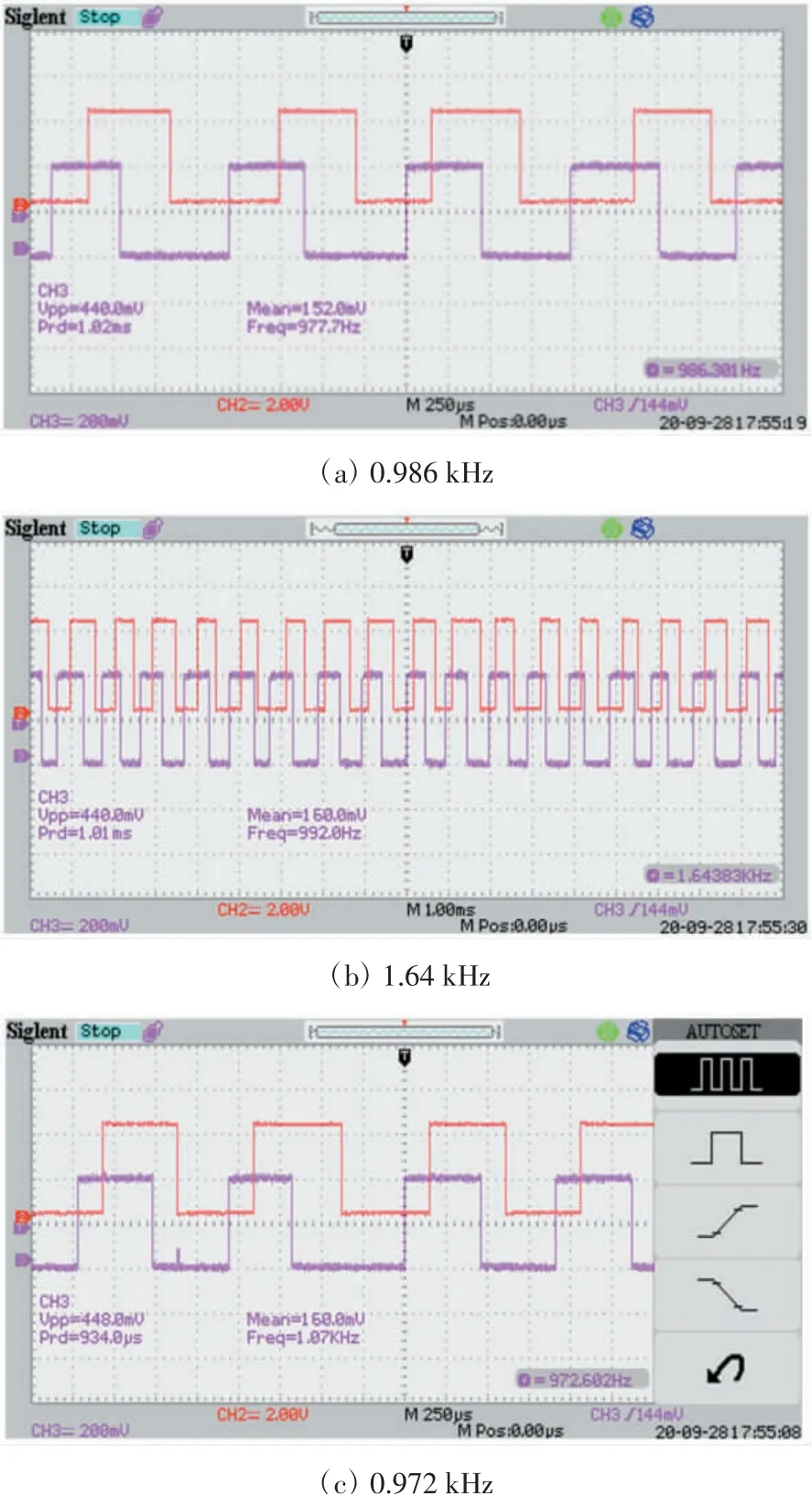
图14 不同频率输出波形Fig.14 Different frequency output waveform
由图14可知,随着频率的增加,其相位也出现误差,因为随着频率的增加以及转速的提高,电机在高速过程中会发生抖动的现象,所以会引起一定的输出偏差,但是不会影响其转速的测量,可以看出电机在速度正常范围内,磁编码器可以实现反馈功能。
6 结论
根据磁场理论分析以及ANSYS有限元仿真得到最佳的安装间距,通过实验验证了不同电机转速下的闭环控制效果。
(1)ANSYS仿真结果表明:在1~2 mm范围区间内,永磁体旋转过程中磁感应强度呈现正余弦变换规律,验证了磁场理论的准确性。
(2)永磁体与磁编码器芯片在1.18~1.52 mm范围时,磁感应强度在30~60 mT,电机可以达到精准的闭环控制效果。利用仿真能够较精确地找到合适的安装位置,可以获取较高分辨率的电机速度。
(3)磁编码器硬件与软件设计满足迷宫机器人运动控制要求,利用本方案可以通过增量式编码模式来输出正交相位的脉冲,满足直流电机的低成本设计方案。
