2016款奔驰GLC260制动辅助系统功能受限
2022-01-26河南刘勤中
◆文/河南 刘勤中
故障现象
一辆2016款奔驰GLC260 4MATIC,搭载274 920型发动机,VIN码为LE42539461L03****,行驶里程为69 105km,仪表提示主动制动辅助系统功能范围受限,近光灯等故障信息。
故障诊断与排除
接车后首先进行功能检查,发现该车故障持续存在,大灯常亮且无法通过大灯开关关闭,仪表台上出现“主动制动辅助系统功能范围受限,参见用户手册”“近光灯左侧”“近光灯右侧”“盲点辅助系统停止运作”等故障信息。但是,发动机可以正常启动,且仪表台上的挡位显示正常,燃油表指示正常,车辆可以正常行驶。
查询故障车的车籍卡发现此车带代码234盲点辅助功能和代码258碰撞报警器,带碰撞警示系统 (FCW) 停止主动制动干预。连接诊断仪进行快速测试,发现多个控制单元中存有故障码。
电子点火开关N73中设置了1个当前状态的故障码:U104388-与外围设备CAN总线通信存在功能故障,总线关闭,A+S。
驻车辅助控制单元N62中设置了3个当前状态的故障码:B122B14-外部右后距离传感器存在功能故障,存在对地短路或断路,A+S;B122O14-中部右后距离传感器存在功能故障,存在对地短路或断路,A+S;B12861C-后部距离传感器存在功能故障,电压值处于允许范围之外,A+S。
组合仪表控制单元A1中设置了1个当前状态的故障码:U120E87-与盲点辅助系统的通信存在功能故障,信息缺失,A+S。
前SAM N10/6中设置了1个当前状态的故障码:U11A387-与“多功能摄像机”控制单元的通信存在故障,信息缺失,A+S。
电控车辆稳定行驶系统(ESP)控制单元N30/4中设置了10个当前状态的故障码:U1428FD-从“防碰撞辅助系统”控制单元接收到不可信的数据,A+S;U1428FE-从“防碰撞辅助系统”控制单元接收到不可信的数据,A+S;U1428FD-从“防碰撞辅助系统”控制单元接收到不可信的数据,A+S;U11A3FA-与“多功能摄像机”控制单元的通信存在故障,A+S;U11A3FB-与“多功能摄像机”控制单元的通信存在故障,A+S;U11A3FC-与“多功能摄像机”控制单元的通信存在故障,A+S;U105CFC-与“防碰撞辅助系统”控制单元的通信存在故障,A+S;U105CFB-与“防碰撞辅助系统”控制单元的通信存在故障,A+S;U105CFA-与“防碰撞辅助系统”控制单元的通信存在故障,A+S;U1444E1-接收到来自“雷达传感器”控制单元的不可信数据,A+S。
左前门控制单元N69/1和右前门控制单元N69/2中设置了1个当前状态的故障码:U11A687-与“雷达传感器”控制单元的通信存在故障,A+S。
转向柱控制单元N80中设置了1个当前状态的故障码:U11A387-与“多功能摄像机”控制单元的通信存在故障,信息缺失,A+S。
多功能摄像机A40/11、防撞辅助系统控制单元A90、右侧外后部内置雷达传感器B92/6、左侧外后部内置雷达传感器B92/11、左侧大灯E1n9、右侧大灯E2n9、发动机控制单元N3/10、燃油泵控制单元N118、传动系统控制单元N127、自动变速器控制单元Y3/8n4中则显示“!”,即无法与诊断仪进行通信。
通过查看GLC整车网络拓扑图(图1)发现,上述无法通信的控制单元的前6个属于外围CAN(CAN PER),这与中央网关—电子点火开关N73设置的故障码U104388(与外围设备CAN总线通信存在功能故障,总线关闭)形成了相互印证,说明外围CAN网络已瘫痪;而后4个无法通信的模块属于传动CAN(CAN C1),但是中央网关—点火开关N73并没有设置CAN C1总线关闭的故障码。
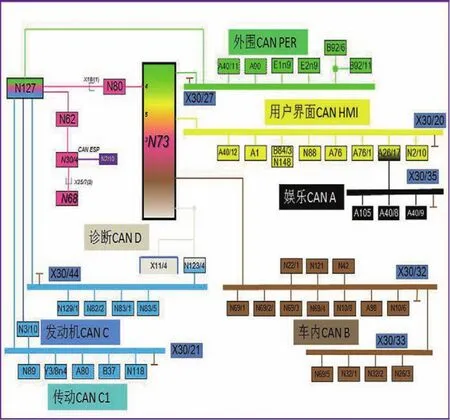
图1 故障车型整车网络拓扑图
为什么会出现这种情况?这是因为从奔驰S级222车型上市开始,奔驰首次采用了STAR 2电子电气架构(EEA)。其特点是采用FlexRay网络取代了底盘CAN (CAN E),发动机控制单元N3/10的网关功能被取消,只是单纯地控制发动机的运转。再加上多种辅助功能的出现,传动系统控制单元N127成了传动系统的网关,CAN C1作为专门的传动系统CAN,用于传动系统各控制单元的信息通信。又因为车辆其它系统需要读取到发动机的各类数据,就专门独立出了CAN C,叫做发动机CAN。
驾驶授权的传送路径如图2所示,点火开关N73通过FlexRay传到传动系统控制单元N127,再分别经过CAN C传给N3/10,经过CAN C1传给变速器控制单元VGS。

图2 故障车型驾驶授权的传送路径图
发动机CAN(CAN C)只有2个控制单元(图3),一个是传动系统控制单元N127,一个是发动机控制单元N3/10,他们之间并没有分配器,那他们是怎么沟通的呢?在这2个控制单元内部各有一个120Ω的电阻,2个控制单元并联起来之后,就是60Ω。
从图3可以看出,N3/10的传动系统运行所需的数据信息传递路径和N3/10诊断数据的传递路径是完全不同的。

图3 故障车型诊断和信息传递路径
发动机控制单元N3/10诊断数据要求的传输速度不高,所以是通过CAN C发送到传动系统控制单元N127,之后通过外围CAN PER传到电子点火开关N73,最后再经过诊断CAN D传输到OBD II接口X11/4与诊断仪XENTRY进行通信(图4、5),中间不经过FlexRay。

图4 诊断仪读取ME的传输路径
而对于传动系统内部各控制单元(比如变速器VGS、燃油泵控制单元N118)运行所需要的发动机控制单元N3/10数据信息则是通过传动CAN C1内部交换;而车辆其他系统需要的发动机控制单元N3/10数据信息(如仪表显示的发动机水温数据)要求的传输速度快,所以通过传动CAN C1传递给传动系统控制单元N127,之后通过FlexRay传送给电子点火开关N73,最后通过用户界面CAN HMI传送到组合仪表A1。
对于车辆其他系统需要的传动系统的其他控制单元的数据信息(比如变速器VGS挡位信号、燃油泵控制单元N118的燃油液位信号),也是通过传动CAN C1传递给传动系统控制单元N127,之后通过FlexRay传送给电子点火开关N73,最后通过用户界面CAN HMI传送到组合仪表A1。
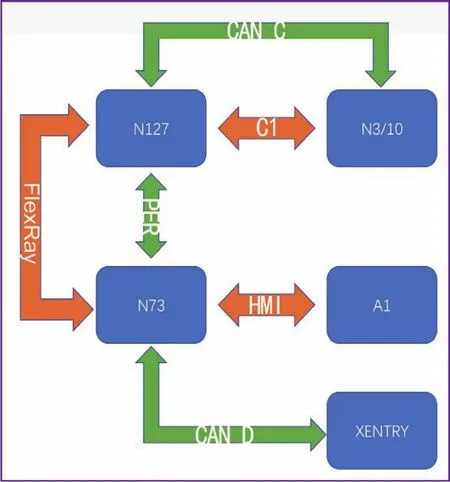
图5 诊断和信号传递路径
传动系统其他各控制单元(如变速器VGS、燃油泵控制单元N118)诊断数据对传输速度的要求不高,都是通过CAN C1发送到传动系统控制单元N127,之后再通过外围CAN PER传到电子点火开关N73,最后再经过诊断CAN D传输到OBD II接口X11/4与诊断仪XENTRY进行通信。
根据上述分析,笔者总结了故障车型发动机控制单元N3/10相关网络通信的故障模式对应的故障现象如表1所示。
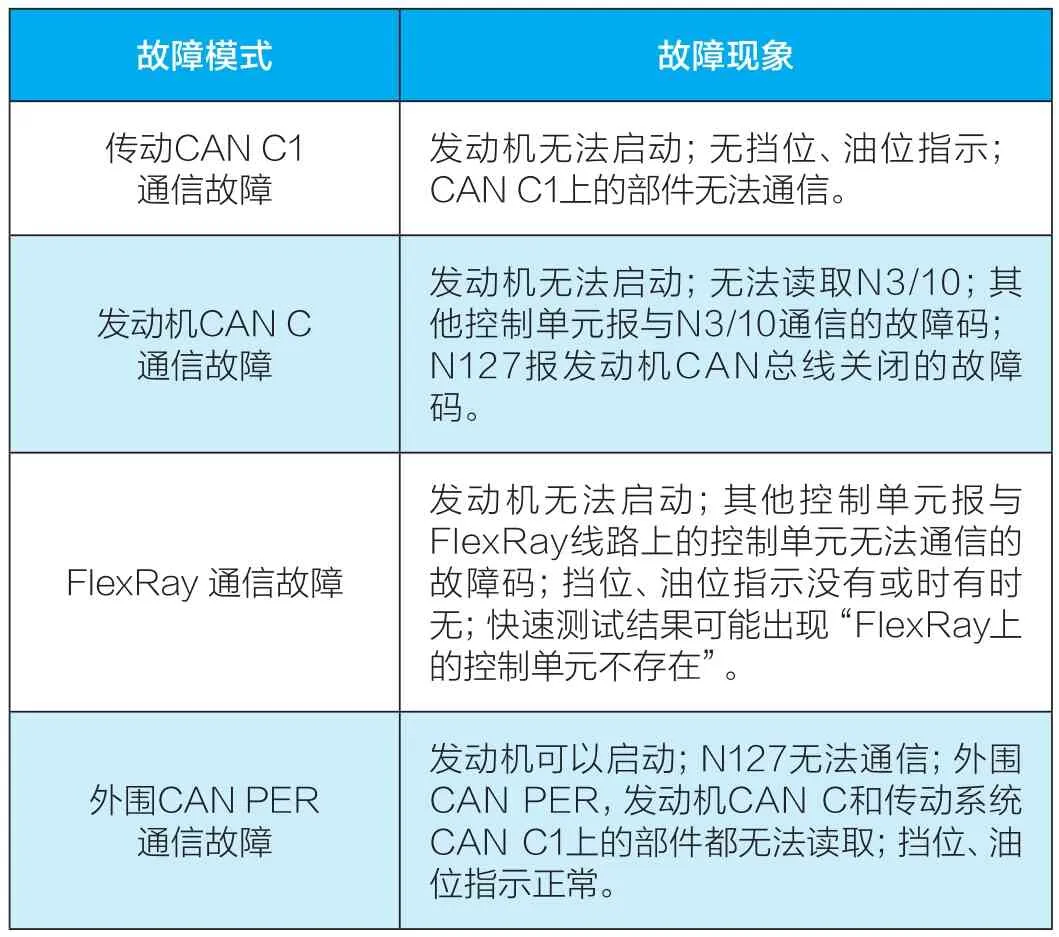
表1 故障车型发动机控制单元N3/10相关网络通信故障
根据功能检查的结果,结合快速测试的结果分析和表1中的故障模式,初步判断故障车的外围CAN PER存在通信故障,可能的故障原因有:外围CAN某个模块存在内部故障;外围CAN线路故障;外围CAN分配器故障。
拆检左前门槛处的外围设备CAN PER分配器X30/27(图6),未见腐蚀等异常现象。用万用表检查CAN PER的电压均为0,不正常。
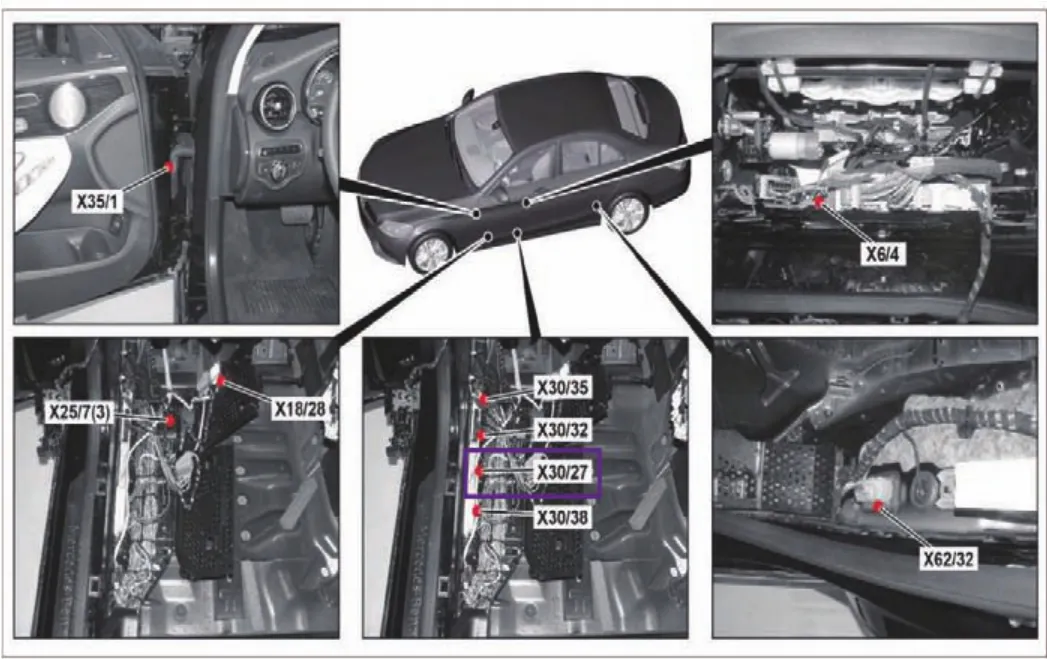
图6 故障车型分配器X30/27安装位置
据此分析,故障车因外围CAN总线关闭,大灯处于应急状态,保持常亮,无法关闭。将大灯开关拧到关闭位置,之后通过逐一拔下X30/27上的插头,并观察大灯是否熄灭。结果发现拨下其中一个插头后,大灯熄灭了,并且CAN PER的电压恢复正常,CAN H电压为2.7V,CAN L电压为2.3V。
再次进行快速测试,发现CAN C1上的控制单元(N3/10、N118、N127、Y3/8n4)都可以正常通信;CAN PER上的模块A40/11、A90、E1n9、E2n9也恢复通信了,只有两个盲点辅助雷达B92/6、B92/11无法通信。
断开后杠上的大插头X26/40,再插上分配器上的插头,故障现象仍然没有重现,说明问题出在大插头X26/40之后。
举升车辆进行检查,发现消声器有拖底碰撞的痕迹,且排气管从尾喉中窜出,排气管的出口已架到了尾喉的上方,高温的排气导致后杠中的线束出现了烧损现象,线束绝缘外皮完全被烧毁,线路之间相互短路(图7)。

图7 故障车排气管从尾喉中窜出
询问车主得知,该车在高速公路上托了一次底,之后继续行驶了一段距离后出现了上述故障。
更换损坏的线束和熔断的盲点辅助雷达的电源熔丝,重新安装消声器和排气管及尾喉后试车,该车各项功能恢复正常,故障被彻底排除。
维修小结
本案例中,故障车因消声器被撞击后导致了排气管移位,高温排气将后杠中的线束烧损,导致CAN PER数据线、电源、搭铁线之间出现互相短路,从而使得CAN PER总线关闭、CAN C1模块无法通信、大灯和主动制动辅助系统功能异常。
在故障诊断之前的问诊环节,如果能与车主进行更详细沟通和交流,或许能大大提高故障诊断的效率。
最后再补充一点。两个盲点辅助雷达(B92/11左侧外部后保险杠集成雷达传感器和B92/6右侧外部后保险杠集成雷达传感器)的零件号相同,可通过针脚 5和针脚6是否搭铁进行区分。B92/11是PIN1搭铁,B92/6则有3根搭铁线,分别是PIN1,PIN5和PIN6(图8)。

图8 故障车型盲点辅助功能电路图
B92/11左侧外部后保险杠集成雷达传感器和B92/6 右侧外部后保险杠集成雷达传感器,根据主从原理工作,主功能或从功能可通过连接器编码(搭铁的PIN位置)确定。集成式右后保险杠雷达传感器执行主功能,意味着集成式左后保险杠雷达传感器将信息通过外围CAN PER发送至集成式右后保险杠雷达传感器。后者对来自两个传感器的相应信息进行评估, 并将相应的请求或数据通过外围CAN PER发送至相关控制单元。
