基于毫米波雷达的车桥振动研究
2022-01-25刘俊生缪小元
刘俊生,缪小元
(1.南京市测绘勘察研究院股份有限公司,江苏 南京 210019;2.江苏省建苑岩土工程勘测有限公司,江苏 南京 210019)
0 引 言
中国高速公路营业总里程已达到14.3万公里,居世界第一,设计时速为80~120 km,高速公路在交通运输过程中起着至关重要的作用。我国国土面积广阔,地形差异极大。复杂多样的地形使得公路桥梁已超过80万座,桥梁已成为中国建造的靓丽名片。由于理论设计与实际施工之间的差异,以及桥梁在使用过程中会受到材料老化、车辆压力、地下水位变化和环境损害等问题,导致其性能退化,易发生重大事故[1]。桥梁变形按其类型可分为静态变形和动态变形。静态变形是时间的函数,如桥梁墩台的变形。而动态变形是表示桥梁在某个时刻的瞬时变形,如桥梁结构的挠度变形[2]。此外,桥梁的体积、跨度等的不断加大,对桥梁的安全性要求更高,利用更高精尖的技术对桥梁结构的实时动态变形监测愈发重要。
目前国内外的挠度测量技术的一般方法有全站仪三角高程法、精密水准测量法、GPS测量法和液体静力水准测量法等。相关学者尝试对挠度测量技术进行改进,刘明亮等联合GPS和地基微波雷达利用EMD算法对桥梁进行监测[3];靳丽静设计了一种将计算机视觉测量和激光球面反射原理结合起来的用于桥梁挠度监测的硬件系统[4];程征等开发了一种多通道式远程微动测量系统用于桥梁动挠度监测[5];由国文等基于激光三角测量传感技术,研发出静动态结构变形测试系统、数据采集和分析软件[6]。这些方法成本较高,操作时间长,在雨雪天测得数据误差较大,不能全天候连续监测,易受天气影响。
毫米波雷达其波长范围是1~10 mm,介于微波和厘米波之间,频段范围是30~300 GHz,其拥有精度高、成本低、全天候覆盖、机动性好、穿透力强和空间分辨率高的优点。本文利用毫米波雷达技术对南京地区某一公路桥梁的挠度进行动态变形监测,并对其变形进行评估,可为今后的桥梁挠度变化监测提供借鉴。
1 算法及原理
1.1 雷达测距测速
以锯齿波调制的FMCW雷达信号为例,雷达距离分辨率是指在雷达图像中,当两个或多个目标与雷达的距离不同时,被雷达设备区分出来的最小距离。由快速傅里叶变换(FFT)理论可知,对两个物体进行区分的关键是在频谱中出现不同的分离峰值,每个峰值表示在特定距离处存在一个物体,两个峰值之间的距离即雷达距离分辨率。
雷达的距离分辨率公式为:
(1)
式中,R为距离分辨率,c为光速,B为信号带宽。雷达的信号带宽与其调频时间成反比,调频时间越长,信号带宽越低,距离分辨率越高。因此雷达以较低峰值功率可以实现较高的性能。
与雷达距离分辨率类似,雷达速度分辨率是指雷达在径向速度上区分目标的能力,雷达速度分辨率公式为:

(2)
式中,λ为雷达工作波长,T=NT0为相干信号处理器的积累时间。因此,雷达的速度分辨率与雷达工作波长成正比,与积累时间成反比。由此可见,为区分两个分辨速度接近的物体,通过适当延长相干信号处理器积累时间会更加有利。
1.2 雷达三维定位
利用毫米波雷达设备对监测目标进行作业时,需要将所观测到的一维雷达测距数据转换为三维坐标,因此需要进行角度转换。如图1所示,以雷达为原点O建立三维坐标系和极坐标系,A为监测目标,其坐标为(X,Y,Z),OA为雷达径向连线,记为R,OA与X-Y平面夹角为θ,与Z-Y平面夹角为φ。
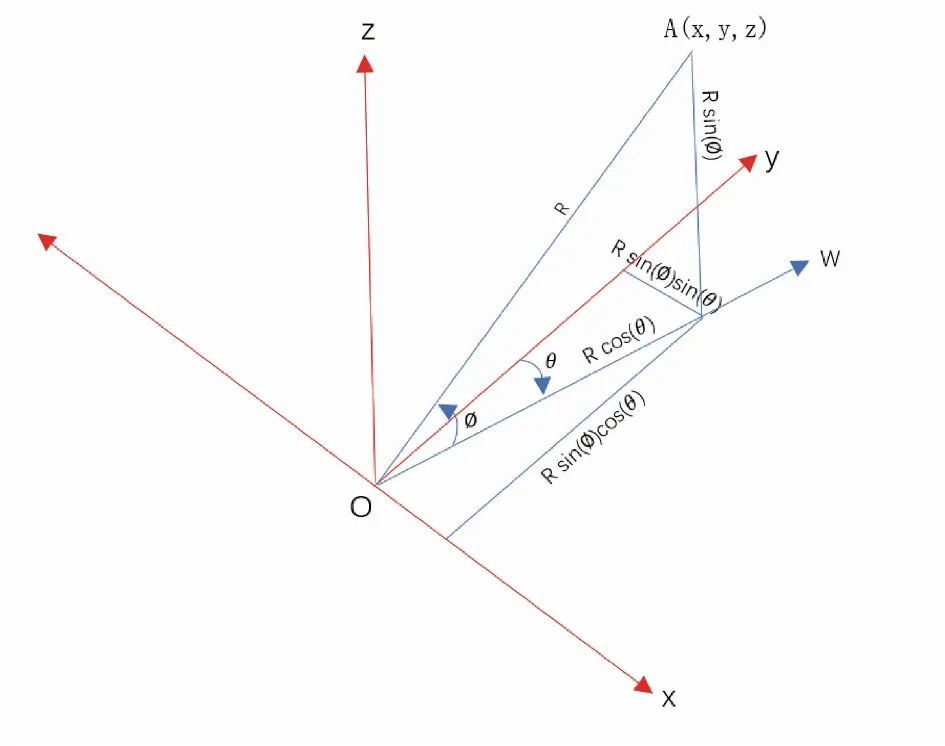
图1 雷达三维坐标系和极坐标系
同一水平的两根天线间相位差为φx,同一竖直方向上的天线相位差为φz,根据方位角θ和俯仰角φ可以求出水平天线相位差和竖直天线相位差,进而将一维雷达测距数据转换为三维坐标。因此监测目标在以雷达为原点的三维坐标系下的表达式为:

(3)
1.3 广义S变换
车辆在桥梁上运行时会产生不同程度的车桥共振,车辆运行的平稳性和安全性受到影响,并且桥梁结构的长期振动又会直接影响桥梁的使用寿命和运行状态[7]。为了有效减弱车桥共振,桥梁建设时对竖向自振频率有特定规范,利用广义S变换时频分析方法(GST)可提取时频振幅谱[8]。当分析高频信号时,GST法窗口较窄,满足高时间分辨率要求。当分析低频信号时,窗口较宽,也可满足对低频信号的分析。因此,GST法对于高频和低频信号的处理均具有良好特性。其公式为:

(4)
式中,τ为时间,用来确定高斯窗口中窗函数在时间轴上的位置,f为频率,i为虚数单位。
2 桥梁变形监测
本方案的研究对象是南京市内某一正常运营的高速公路桥梁。整个桥梁东西走向,双向六车道设计,桥宽10 m,桥长9 km,行车道净宽9 m,设计时速每小时80 km。
2.1 实验方案
实验软件选择毫米波雷达串口助手软件(mm Wave Radar Serial Ports Assistant,RSPA),实验硬件选择美国德州仪器(Texas Instruments,TI)公司生产的AWR1243BOOST系列雷达,该仪器是一个FMCW毫米波雷达传感器。为了确定每次出现的动态挠度变化大的时刻,专门有一人负责在桥头记录有重型车辆通过桥梁的时刻。将AWR1243雷达放在监测目标下方,利用RSPA软件实时采集数据。为了减弱桥头对测站的影响,选择距离西边桥头1 km处为起点,记为P1,自西向东依次间隔1 km设置4个测站点,分别记为P2、P3、P4、P5。在后面4个测站点安置仪器时,尽可能使雷达设备与监测对象的距离大致相等。为了更好监测桥梁在正常通车情况下的挠度动态变化,选取一个观测角度作为标准方向,将雷达设备布设于桥梁正中下方,天线竖直指向桥梁底部。测量时间15 min,雷达设备采样率为250 Hz。经过反复试验,平均1 min每个测点有6辆车通过。
2.2 动挠度分析
将5个点的观测数据进行解码,得到监测目标与雷达的测距距离。将研究时段内每个点的测距平均值作为基准值,将每个数据扣除基准值获取位移值。以P1和P5为例,选取其中1 min的位移值变化绘出挠度动态变化图(图2)。由图2可知,P1点在5 s、11 s、16 s、25 s、34 s和49 s有车辆通过,导致桥梁发生形变,P2点在9 s、19 s、31 s、35 s、46 s和56 s有车辆通过。根据记录人员实际记录可知,这几个时间点确有车辆通过,引起桥梁振动。

图2 挠度动态变化图
取5个测点连续通过6辆车辆的动挠度变化情况进行统计,取跨径32 m计算跨挠比[9],统计结果如表1所示,5个点中,P5点在第三车次的动挠度最大,为0.50 mm,对应的跨挠比为6.38×104,其他点的所有车次动挠度均小于0.50 mm。根据《公路工程技术标准》(JTGB01-2014)规定,跨度小于40 m的梁体竖向活载跨挠比不低于1 600,本次实验最低跨挠比在P5点,为6.38×104,远大于该限值。因此,利用毫米波雷达测量技术对桥梁的动挠度进行测量,挠度变化小,跨挠比高,表明毫米波雷达测量精度高,在实际工程测量中具有较高应用价值。

表1 各个测点动挠度变化及跨挠比

表1(续)
2.3 时频分析
当车辆通过时,产生车桥振动,选取5个测点6辆车通过时的毫米波雷达动挠度测量主频提取结果时频进行统计分析(表2)。由表2可知,时频分析结果存在3个明显的能量集中的频带范围,主频分布范围在0.6~0.9 Hz,4.7~5.7 Hz,8.7~9.8 Hz,将其定义为低频、中频和高频。低频阶段对应车辆进入和离开雷达设备监测范围时,持续时间极短,为车辆冲击频率。中频对应车辆完全处于雷达监测范围,持续时间稍长,是由车辆轮轴周期性荷载对桥梁的竖向激振频率。高频对应车辆离开监测范围后,桥梁自身产生振动。监测桥梁位于市区,大部分车辆为小轿车,并且市区交通繁忙,车辆速度不是很高,因此取车辆平均长度2.5 m,速度取40 km/h,根据车桥共振研究公式fv=v/(3.6dv)(fv为激振频率,v为车辆运行速度,dv为车辆长度)[10],激振频率结果为4.44 Hz。根据表2数据,实际测得车辆激振频率跟理论值差异不大。自振频率方面,根据相关规范规定,桥梁自振频率限值为3.03 Hz,实测结果高于规定值。并且激振频率与桥梁自振频率差值大于3 Hz,表明车辆与桥梁共振概率较小,桥梁性能良好。

表2 毫米波雷达动挠度测量主频提取结果
3 结 语
现如今,我国桥梁建设进展迅猛,朝着新技术、新材料、新性能、大跨度方向发展。以此同时,对桥梁的动态挠度变形监测是延长桥梁使用寿命、防范安全风险的一项重要措施。本文使用的毫米波雷达测量技术,精度高、便携性强、数据处理简单、性能稳定、安置方便,可满足桥梁的变形监测需要,在实际工程中可以推广使用。在未来,我国桥梁建设在公铁两用桥方面将进行更大投入,将毫米波雷达测量技术应用在公铁两用桥方面还将有更大的发挥价值。
