车载LiDAR和无人机一体化控制的全息数据采集与应用研究
2022-01-25高桂甫任高升王亚梅
高桂甫,任高升,王亚梅,周 益
(1.盐城市勘察测绘院,江苏 盐城 224002;2.南京工业大学测绘科学与技术学院,江苏 南京 211816)
0 引 言
城市全息数据采集技术为新型基础测绘数据生产提供了新思路,成为智慧城市数据采集和信息化建设的主要方法。智能化全息测绘利用倾斜摄影、激光扫描等传感器获取建筑、道路、城市部件及植被水系等地形数据,并结合调绘充实地理实体要素,建立地理实体的矢量、三维模型,形成涵盖地上下、室内外的高精度全息测绘数据,为智慧社会提供全方位、智能化的地理信息服务[1]。城市空间结构复杂,传统基础测绘采集数据较为单一,普遍存在数据漏洞,难以表达目标完整的细节特征[2]。结合激光雷达、倾斜摄影技术采集点云和影像数据,对测区内地物进行各类要素采集,生产全要素地形图,对新型基础测绘发展具有积极意义。
相关学者对全息数据采集及新型基础测绘地形图要素提取方法进行了研究,并取得了一定的成果。宁振伟[3]采用背包、车载激光结合无人机倾斜航测获取城市园区全息数据,对激光点云和倾斜影像进行标定、匹配、融合,生产要素化、实体化三维地图数据;王文峰[4]结合上海新型基础测绘建设试点项目,利用倾斜摄影和激光雷达技术进行科技园全息数据采集,完成了测区地物各类要素提取,实现了新型基础测绘地形图升级;李涛等[5]研究了车载 LiDAR 在智能化全息测绘中的应用,对道路红线范围内三维矢量数据应采尽采,获得了道路红线范围内的高精度全要素三维地形数据。但全息数据处理中,存在多源点云融合可控性偏低的问题,如何实现多源点云高精度融合是亟待解决的问题。
针对车载LiDAR点云与无人机密集影像匹配(Dense Image Matching,DIM)点云数据坐标基准不同、尺度不一的问题,本文利用特制标靶球构建地面控制、激光扫描控制、无人机航测控制的高精度一体化控制体系;采用车载激光雷达扫描和无人机倾斜摄影技术采集测区全息数据,通过坐标系一体化控制实现多源点云融合,获取测区完整点云模型,提取地物各类矢量特征,生产全要素地形图,为智慧城市建设提供全方位数据支撑。
1 多源点云一体化控制
利用车载LiDAR结合无人机倾斜摄影获取城市地物立面点云和影像数据,基于影像密集匹配算法生成DIM点云,对激光点云进行补充,构建城市一体化点云模型。但两种点云属于异源数据,坐标系统不一致,点位精度不同,因此,需要进行车载LiDAR点云与无人机DIM点云数据的精确融合,建立整个场景统一的点云模型。若在数据采集时不布设控制点,激光点云和无人机影像点云坐标基准不一致,需要通过点云配准进行异源点云融合。但异源点云精度差异较大,点云配准难以获得较好的融合模型[6]。顾及异源点云配准的复杂性,本文以高精度控制测量为基准,建立地面控制点、车载激光点云和无人机影像的高精度一体化控制体系,将车载激光扫描点云和无人机影像点云坐标转换至控制点坐标系统,实现多源点云数据融合,一体化控制技术流程如图1所示。

图1 多源点云一体化控制技术流程图
通过标靶球建立了全站仪控制点、激光扫描仪控制点、无人机控制点高精度对应关系,因此,统一控制标靶球的构建是建立一体化控制体系的关键。在标靶球上安置反射片和水准器泡统一的特殊装置,并精确确定反射中心与扫描球中心、扫描球中心与地面点之间的相对距离,统一地面控制点、激光扫描点、无人机控制点的坐标系统。
利用车载激光雷达扫描、倾斜摄影测量和其他补充测量手段进行测区全息数据采集,地面控制点利用高精度控制测量仪器获取,与车载激光扫描基准点联测,采用三维约束网平差进行数据解算,获得高精度点云数据。在无人机航摄建模过程中,利用地面控制点提高无人机影像定向和建模精度。通过建立一体化控制体系,车载LiDAR点云与无人机DIM点云在高精度控制点系统下,提高了多源点云融合精度和建模精度,为后续矢量特征提取与地形图生产提供了基础。
2 全息数据采集与处理
高效、全面、精准地采集测区全息数据是新型基础测绘的重要内容,以上海张江科学城为研究区域,利用车载LiDAR和无人机结合一体化控制点采集测区的全息数据,技术流程如图2所示。

图2 全息数据采集与地形图生产流程
2.1 测区概况
实验区域位于上海市浦东新区张江科学城,面积约28.3 km2,如图3所示。测区内交通网络发达,地物类别丰富,覆盖点、线、面等地理实体类型,建筑物、道路、交通、管线及植被等地理实体种类齐全,具有较强的代表性。

图3 测区概况图
全息数据采集前收集施测及邻近区域的正射影像、大地测量资料及道路通行情况,激光扫描系统与无人机航测平台相互标定,通过控制点精度、控制点密度、GNSS基站布设位置、GPS信号强度及失锁时间、激光扫描路径及航测航线合理性等参数设置,对全息数据采集效率和数据精度进行优化。
2.2 激光雷达数据采集与扫描处理
车载激光扫描系统[7]主要由激光扫描仪、全景相机、惯性导航单元、定位系统和里程计等组成,系统集成度高、测量精度高且可多平台安放,能够高效获取建筑物立面、道路及其附属设施空间点云和纹理信息。车载LiDAR点云生产包括点云数据采集、轨迹解算、数据纠正等步骤。
2.2.1 点云数据采集
点云数据采集包括设备参数设置,GNSS基站架设、激光扫描和纠正点、检查点测量等过程。首先,选择已知的4个GNSS平面和高程控制点作为车载激光扫描基准数据,根据测区情况增设GNSS控制点加密地面基站。基站架设完成后,采用GNSS静态观测方法进行惯性测量装置的初始化,GNSS卫星数量大于10颗,位置精度衰减因子(PDOP)小于4。然后,利用AS-900HL车载激光雷达扫描系统对测区外围的主干道沿顺时针方向进行扫描,在测区内从北到南,从东到西单次分段扫描,采集城市道路以及道路两侧城市部件等各类要素。最后,采用VRS-RTK模式进行纠正点测量,选取道路标线、箭头标识等易于识别的特征点,沿道路每间隔约200 m布设1个纠正点,每点独立初始化2次,每次采集两组观测数据,将4组数据的平面点位平均值作为平面测量值。在相邻纠正点中间布设检查点,对纠正点进行检查,平面点位较差应小于3 cm。
2.2.2 轨迹解算
数据采集完成后,结合GNSS基站数据与IMU数据计算得到POST文件。利用后处理软件CoPre和POST文件提供的时间、位置、姿态信息及相关参数完成点云数据、全景影像数据的解算。利用Inertial Explorer和ProcessTC软件进行基站数据和移动站数据格式转换和基站与移动站紧耦合解算。
2.2.3 数据纠正
将纠正点和检查点点位坐标数据导入CoRefine点云纠正软件进行标记,完成数据纠正,并生成纠正点和检查点精度报告,其平面与高程测量精度应不低于图根精度。通过数据纠正提高POS数据精度,生产高精度车载LiDAR点云数据。
点云数据解算和纠正完成后,使用检查点数据进行点云精度对比分析,点云的平面和高程精度均控制在5 cm内。点云数据平面坐标和高程系统在一体化控制坐标系下,利用CoPre软件对车载点云进行着色,如图4所示。

图4 车载激光点云数据
2.3 无人机倾斜摄影建模
无人机倾斜摄影技术通过在无人机平台搭载多个传感器,准确获取地物多视角影像数据,通过多视影像密集匹配获取高精度高分辨率的密集匹配点云,对其进行纹理映射,构建具有真实纹理的城市实景三维模型,对城市地物的位置、高度及纹理等空间信息进行直观表达。
2.3.1 多视影像密集匹配
多视影像密集匹配以三维重建为目的,利用空三加密生成连接点,基于影像密集匹配算法构建高密度点云,恢复影像中所有像素的空间三维坐标。目前,软件中应用较多的是多视图视觉(Multi-View Stereo,MVS)建模工作流程[8],采用CMVS和PMVS方法进行多视影像密集匹配,生产大型场景的三维密集点云。利用无人机获取航拍影像数据,基于SFM算法获取相机参数和稀疏三维点云,通过影像空中三角测量获取精确的影像外方位元素,结合CMVS算法对无人机影像聚簇分类。影像聚簇分类后,使用PMVS算法对同一地物多视角影像进行初始特征匹配、膨胀、过滤,获取DIM点云。通过泊松表面重建算法获得DSM数据,对其进行纹理映射,构建城市三维模型。
2.3.2 模型构建与DIM点云生成
根据测区概况制定无人机航测方案,利用大疆M300无人机搭载五镜头倾斜相机进行倾斜航测,利用遥控平台规划从北向南之字形航线,覆盖飞行区域,获取测区多视影像数据。
对地面控制点和影像坐标系进行统一。利用LocaSpaceViewer软件提取每张无人机影像的POS信息,编写坐标转换软件将每张照片的坐标转换为地面控制点坐标系统下的坐标,重新生成POS文件,提高影像坐标转换精度。将无人机航拍获取的多视影像、相机属性数据、解算的POS数据及地面控制点导入建模软件,对影像进行刺点和空三加密,提交建模任务,生成控制点坐标下的高精度建筑物三维模型和DIM点云。
综上所述,利用车载激光扫描系统获取城市道路两侧地物立面点云数据,通过无人机倾斜摄影获取城市地物影像数据,基于影像密集匹配算法生成城市DIM点云,对激光点云进行补充,实现两种数据的优势互补。采用一体化控制方法对张江科学城的车载LiDAR点云与DIM点云进行融合,统一空中、地表多传感器点云数据时空基准,构建城市空间完整高精度点云模型。通过平差、配准、纠正、精化等方法控制点云精度,利用多源点云数据生产各类专项数据。
3 地形图生产与精度分析
车载激光雷达扫描和无人机倾斜摄影测量采集的全息数据经过内业处理,获得了融合点云、三维模型和车载激光雷达点云等数据成果。通过融合点云、倾斜摄影Mesh模型对城市道路、建(构)筑物特征、街坊内部道路及其他要素数据进行三维矢量特征提取,添加属性数据,生成全要素地形图,并进行地形图质量检查与精度分析。
3.1 全要素地形图生产
对测区内城市道路、街坊内部道路及其他区域的地物,按照线要素、点要素、面要素的顺序,采用Lidarfeature软件和EPS采编系统进行各类要素采集。
(1)线要素采集。线要素包括道路边线、车道线、人行横道线、地面标识、路灯、探头等,提取线状地物实际位置,其中,路灯、交通指示箭头等有朝向的地物需采集角度信息。
(2)点要素采集。点要素包括杆类、箱类、亭类、牌类、行道树等,提取点状地物落地中心位置,交通标志牌、公交站牌等牌类地物根据其具体类别提取左下角或中心位置。
(3)面要素采集。面要素包括道路上的绿化、停车位等,提取其边界及中心点。
通过外业调绘的方式对缺失数据、辨识不清数据进行补测,修改完善实体要素的社会经济属性,形成全要素地形图,局部制作成果如图5所示。

图5 全要素地形图局部成果
相比于传统地形图,测区范围内新增地物要素 70 多种,为精细化城市管理提供了数据支撑。依据点状、管线线状、道路面状和建筑物体状等地理实体数据进行组织建模,实现各要素的分类代码、实体编码、实体关系映射一致,形成对象化的三维模型成果,对全息数据进行直观表达[9-10]。
3.2 成果精度分析
选取2 km2全要素地形图成果数据进行精度验证。通过融合点云和倾斜摄影Mesh模型对城市道路、建(构)筑物特征、街坊内部道路及其他要素进行质量检查。使用RTK布控,全站仪实测的方法进行地形图精度分析验证。采集平面点1 308个,高程点285个,平面精度主要按地物类别统计,如表1所示,高程精度按地物精度等级统计,结果如表2所示。
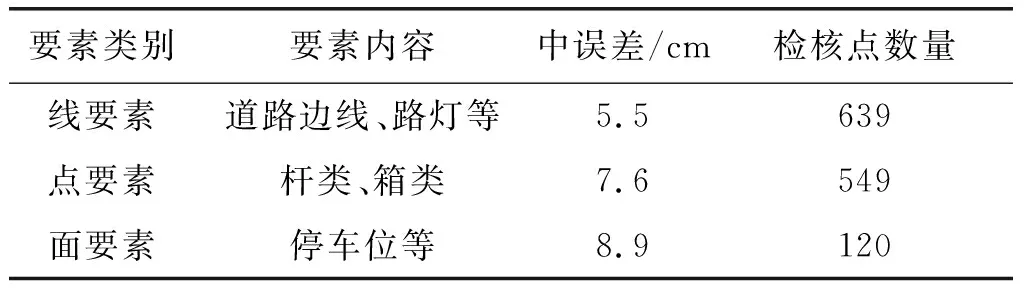
表1 全要素地形图平面精度统计表

表2 全要素地形图高程精度统计表
由表1可知,地形图地物要素提取平面精度在10 cm内,其中,线要素提取精度高于点要素和面要素。由表2可知地形图地物要素提取高程精度在7 cm内,城市道路等要素提取精度在5 cm以内,满足新型基础测绘地形图生产的精度要求。
4 结 语
本文研究了地面控制、激光扫描、无人机航测一体化控制下多源异构点云融合方法。结合车载LiDAR和无人机倾斜摄影技术采集测区全息点云数据,并进行地物矢量特征提取,生产全要素地形图。通过构建车载LiDAR和无人机一体化控制体系实现了多源点云融合,解决了城市空间外部精细建模在完整性和精度方面的问题。相比于传统地形图,全要素地形图增加了要素种类和属性信息,获取的数据更加全面精细。但本文未顾及室内和地下区域,后续将联合背包激光扫描系统获取室内和地下区域点云数据,形成室内外、地上下一体化全息数据,为城市管理提供数据支撑。
