基于AMESim的65吨汽车起重机支腿液压系统设计与仿真
2022-01-20马丽英王龙轩张振
马丽英 王龙轩 张振
摘要:随着社会资源开发,起重机的使用逐渐增多,同时施工作业时由于支撑不稳定引发侧翻等问题引发的安全事故也在上升。本文提出运用液压锁在支腿系统工作时能够将其锁死,防止其发生“软腿”,提高起重机支腿的支撑稳定性,设计优化起重机支腿液压系统。利用AMESim对其系统建模并进行仿真分析,通过闭锁压力变化曲线分析系统工况。结果表明:整个支腿液压系统能够安全稳定的运行,满足起重机的工况要求。
Abstract: With the development of social resources, the use of cranes has gradually increased. At the same time, problems such as rollovers caused by unstable supports during construction operations have caused an increase in major safety accidents. This paper proposes that the hydraulic lock can be used to lock the outrigger system when it is working, prevent it from "soft legs", improve the support stability of the crane outriggers, and design and optimize the hydraulic system of the outriggers of the crane. Use AMESim to model the system and perform simulation analysis, and analyze the system working conditions through the blocking pressure change curve. The results show that the entire outrigger hydraulic system can operate safely and stably to meet the requirements of the crane's working conditions.
关键词:汽车起重机;AMESim仿真;支腿;液压系统
Key words: truck crane;AMESim simulation;outrigger;hydraulic system
中圖分类号:F407.471 文献标识码:A 文章编号:1674-957X(2022)04-0001-04
0 引言
在施工建设中,汽车起重机相比于其他起重机有着特有的机动性,并且在其中扮演着至关重要的角色[1]。尤其起重机支腿机构更是一种需要同时承担不同工况下的关键辅助机构,是装在车架上可折叠或收放的支撑构件,直接关乎施工人员驾驶作业时的安全问题及影响着汽车起重机的工作性能[2][3]。汽车起重机的支腿一般有四个,均布于起重机侧面,以提高起重机支撑平面轮廓宽度,从而增加起重机的抗倾覆稳定性。本文主要是针对QY65型汽车起重机H式支腿进行建模并仿真,分析支腿在起重机不同工况下的液压系统的安全稳定性。
在液压控制系统工程设计[4][5]中AMESim软件[6][7][8][9]能够发挥其精确灵活的建模仿真特性,且该软件应用广泛。此软件可以建立复杂系统模型,并且进行仿真计算和进一步分析[10][11][12][13]。能够为液压系统的设计提供可靠的理论依据。
1 液压支腿工作原理
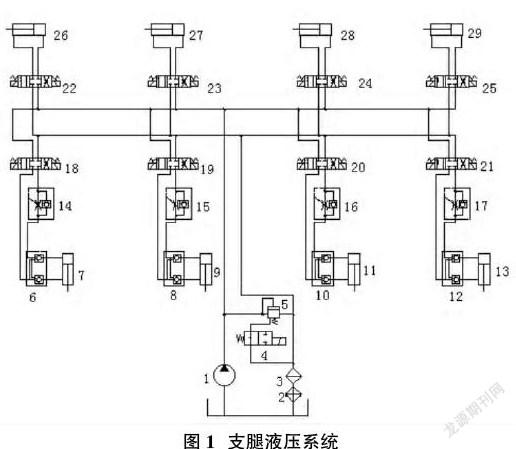
液压支腿分为以下五种基本工作状态:无动作、水平同步伸、水平同步缩、垂直同步伸、垂直同步缩[14]。无动作:液压油通过泵吸入主油路,经换向阀到回油路经过滤后返回油箱[14]。垂直同步伸:液压油通过泵吸入主油路,经换向阀进入垂直液压缸上侧的无杆腔,实现垂直伸的动作,有杆腔的回油经过单向顺序阀后过滤回油箱[14]。垂直同步缩:液压油经过泵吸入主油路,经换向阀进入垂直液压缸下侧的有杆腔,实现垂直缩的动作,无杆腔的油经过滤后回油箱[14]。在液压缸实现垂直同步伸缩时三位四通阀左右位分别得电使系统得到相应的加压,剩余的压力经溢流阀返回油箱[14]。如图1所示。
2 支腿液压系统设计
2.1 支腿液压系统设计
2.1.1 支腿压力的计算
起重机的最大支腿反力是指在起重机吊重过程中支腿所受到的最大法向反作用力。而打开支腿是在不进行吊重作业的情况下完成的。支腿载荷为整个起重机的质量。所以,支腿液压回路工作压力必须通过开启支腿时的支腿反力来确定[14]。
2.1.2 打开支腿反力时支腿反力的计算
支腿打开时的载荷为整车自重G。纵向距离e=1/6=6.9/6=1.15,满足稳定性的前提是重心偏矩e<1.16,故确定前后支腿到重心的跨距a=3.0,b=3.9。由此可以计算出支腿反力R。
2.1.3 吊重时最大支腿反力的计算
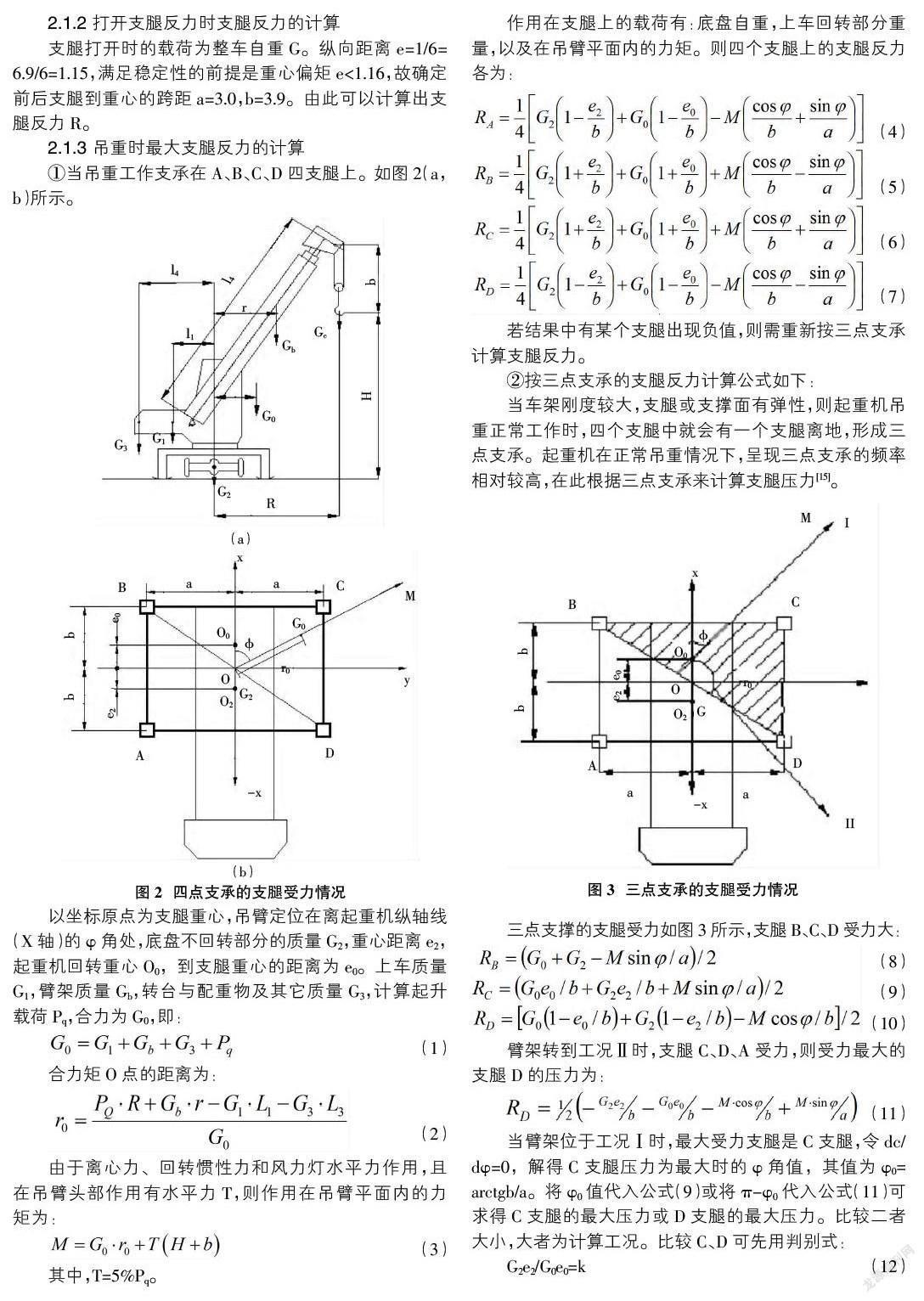
①当吊重工作支承在A、B、C、D四支腿上。如图2(a,b)所示。
以坐标原点为支腿重心,吊臂定位在离起重机纵轴线(X轴)的?渍角处,底盘不回转部分的质量G2,重心距离e2,起重机回转重心O0,到支腿重心的距离为e0。上车质量G1,臂架质量Gb,转台与配重物及其它质量G3,计算起升载荷Pq,合力为G0,即:
若结果中有某个支腿出现负值,则需重新按三点支承计算支腿反力。
②按三点支承的支腿反力计算公式如下:
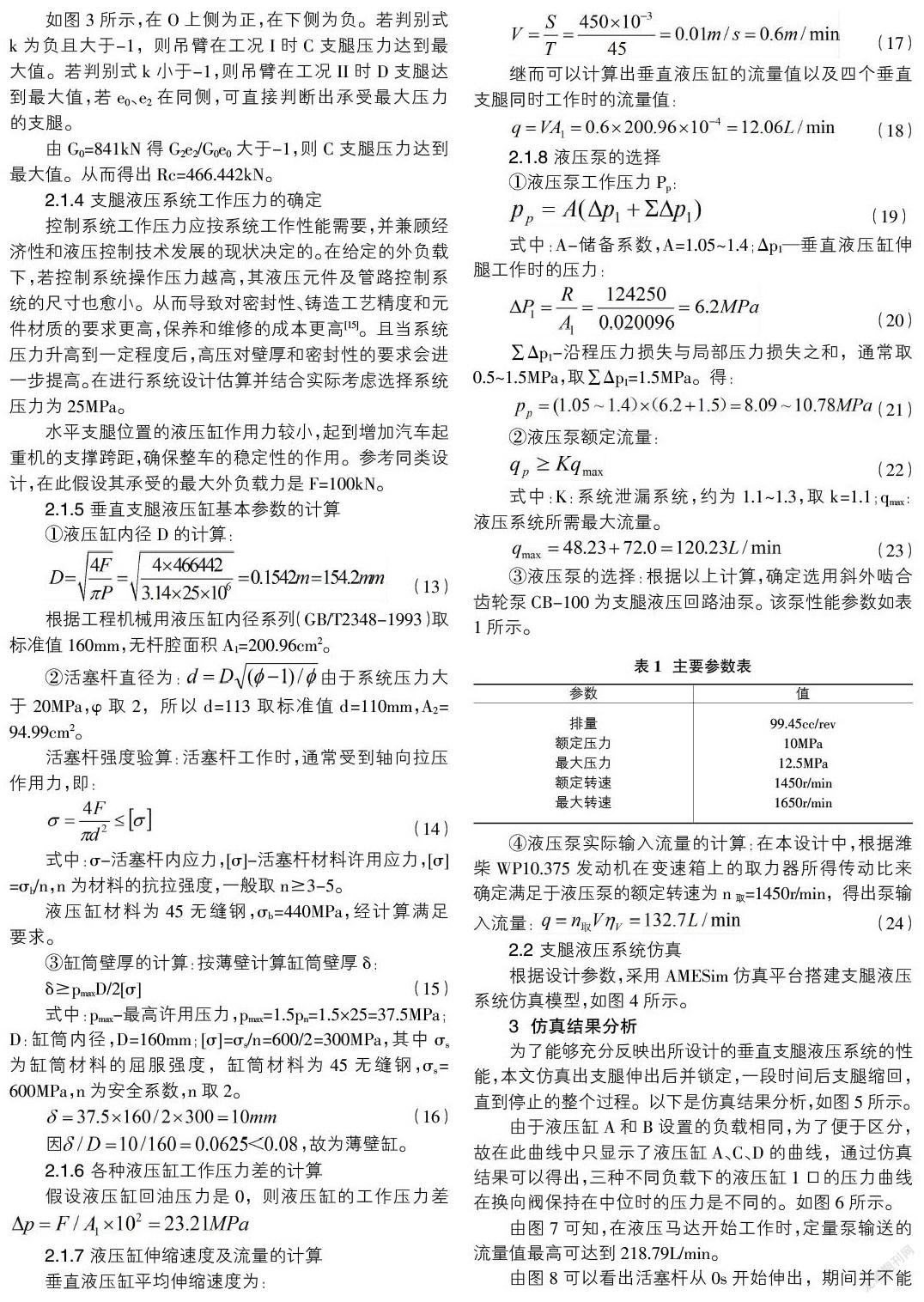
当车架刚度较大,支腿或支撑面有弹性,则起重机吊重正常工作时,四个支腿中就会有一个支腿离地,形成三点支承。起重机在正常吊重情况下,呈现三点支承的频率相对较高,在此根据三点支承来计算支腿压力[15]。
当臂架位于工况Ⅰ时,最大受力支腿是C支腿,令dc/d?渍=0,解得C支腿压力为最大时的?渍角值,其值为?渍0=arctgb/a。将?渍0值代入公式(9)或将?仔-?渍0代入公式(11)可求得C支腿的最大压力或D支腿的最大压力。比较二者大小,大者为计算工况。比较C、D可先用判别式:
G2e2/G0e0=k(12)
如图3所示,在O上侧为正,在下侧为负。若判别式k为负且大于-1,则吊臂在工况I时C支腿压力达到最大值。若判别式k小于-1,则吊臂在工况II时D支腿达到最大值,若e0、e2在同侧,可直接判断出承受最大压力的支腿。
由G0=841kN得G2e2/G0e0大于-1,则C支腿压力达到最大值。从而得出Rc=466.442kN。
2.1.4 支腿液压系统工作压力的确定
控制系统工作压力应按系统工作性能需要,并兼顾经济性和液压控制技术发展的现状决定的。在给定的外负载下,若控制系统操作压力越高,其液压元件及管路控制系统的尺寸也愈小。从而导致对密封性、铸造工艺精度和元件材质的要求更高,保养和维修的成本更高[15]。且当系统压力升高到一定程度后,高压对壁厚和密封性的要求会进一步提高。在进行系统设计估算并结合实际考虑选择系统压力为25MPa。
水平支腿位置的液压缸作用力较小,起到增加汽车起重机的支撑跨距,确保整车的稳定性的作用。参考同类设计,在此假设其承受的最大外负载力是F=100kN。
2.1.5 垂直支腿液压缸基本参数的计算
①液压缸内径D的计算:
2.2 支腿液压系统仿真
根据设计参数,采用AMESim仿真平台搭建支腿液压系统仿真模型,如图4所示。
3 仿真结果分析
为了能够充分反映出所设计的垂直支腿液压系统的性能,本文仿真出支腿伸出后并锁定,一段时间后支腿缩回,直到停止的整个过程。以下是仿真结果分析,如图5所示。
由于液压缸A和B设置的负载相同,为了便于区分,故在此曲线中只显示了液压缸A、C、D的曲线,通过仿真结果可以得出,三种不同负载下的液压缸1口的压力曲线在换向阀保持在中位时的压力是不同的。如图6所示。
由图7可知,在液压马达开始工作时,定量泵输送的流量值最高可达到218.79L/min。
由图8可以看出活塞杆从0s开始伸出,期间并不能保持状态稳定,直到60s才保持稳定状态,60s到354s为支撑锁紧状态。354s到400s,活塞杆以较为平稳的状态缩回。从仿真结果整体看来伸出和缩回的时间都满足设计要求。
4 结论
①设计满足工况要求的汽车起重机下车支腿液压系统。②系统仿真结果,汽车起重机支腿液压系统在闭锁压力下能够安全稳定的运行。③通过仿真数据和设计数据进行比对后满足设计要求,对未来起重机在实际应用中提供了一定的参考依据。
参考文献:
[1]宋晓丽.汽车起重机活动支腿结构改进设计[D].大连理工大学,2015.
[2]GB/T 3811-2008,起重机设计规范[S].中国标准出版社,2008.
[3]李小平,曾远豪,刘望球.汽车起重机活动支腿设计及运动仿真[J].机电工程技术,2020,49(01):71-73.
[4]刘雅俊,史露露,兰中旭,等.液压系统降额可靠性设计与关键液压元件配置[J].机床与液压,2018,46(1):182-184.
[5]段惠玲,常庆玉.液控单向阀在液压系统回路中的合理设计[J].液压气动与密封,2018(1):77-80.
[6]李锁牢,李明辉.基于AMESim的盾构管片拼装机液压回转系统仿真分析[J].液压与气动,2017,45(1):35-38.
[7]梁全,苏齐莹.液压系统AMESim计算机仿真指南[M].北京:机械工业出版社,2014.
[8]张德生.基于AMESim的液动连杆机构运动特性仿真研究[J].液压与气动,2017(9):77-81.
[9]赵伟民,张西伟,刘国莉,等.基于AMESim的双轮铣槽机铣削装置液压系统仿真[J].机床与液压,2016,44(1):152-154.
[10]何仁,谢达. 基于AMESim的减速带能量回收装置换能器特性研究[J].重庆交通大学学报(自然科学版),2017,36(3):115-120.
[11]付永领,祁晓野.LMS Imagne.Lab. AMESim系统建模与仿真参考手册[M].北京:北京航空航天大学出版社,2011.
[12]邓红星,王宪彬.基于AMESim的汽车制动系统性能研究[J].重庆交通大学学报(自然科学版),2013,32(5):1059-1062.
[13]向琴,罗天洪,孙冬梅,等.基于AMESim的自适应柔性夹具机械手指的动態特性研究[J].重庆交通大学学报(自然科学版),2012,31(6):1215-1218.
[14]王腾振.2020年汽车起重机支腿液压系统设计[OL].道客巴巴2020.4.30.http://www.doc88.com/p-51761810609887.html.
[15]罗杰.QY65型汽车起重机下车液压系统设计[D].重庆交通大学,2013.
