自动导航驾驶系统在蔬菜机械化生产中的应用试验
2021-12-29史志明雷凤芸骆永亮
史志明 雷凤芸 骆永亮
1.成都市农林科学院,四川成都
2.成都市郫都区农业农村和林业局,四川成都
1 自动导航驾驶系统基本情况
农机自动导航驾驶系统主要包括全球导航卫星系统(GNSS)、RTK定位技术、自动导航技术及农机转向机构。RTK定位技术是一种基于载波相位观测的实时动态高精度定位技术,可以实时了解移动站在设定坐标系中的三维定位信息,利用RTK基站接受卫星信号,并实时输出高精度差分信号,同时,利用电台或者网络模式将差分数据传输给拖拉机终端设备。农机导航系统则通过GNSS、传感器等感知系统获得农机的绝对位置信息和运动状态,并将信息与预设的路径进行比较,确定农机与路径之间的相对位置关系,通过控制系统按照一定算法计算、控制农机的转向系统,使机器按照预定的路径行驶,实现农机的自动导航。目前,农机的转向控制系统应用效果较好的主要有液压转向控制系统和方向盘电机转向控制系统。
2 自动导航驾驶系统在生菜和胡萝卜机械化生产中的应用试验
2.1 试验条件
本试验分别在成都市郫都区永盛生菜机械化生产基地和简阳市十里街道胡萝卜机械化生产基地开展,针对生菜机械化开沟起垄环节和胡萝卜起垄播种环节,使用自动导航驾驶设备行走后进行垄体直线度、相邻垄距的测定。生菜试验地块面积共3.33hm2,胡萝卜试验地块面积共6.67hm2。生菜开沟起垄试验采用东方红LX804拖拉机悬挂意大利Hortech精整地机,胡萝卜起垄播种试验采用爱科1204型拖拉机悬挂德沃2BQS-8X气力式播种机,机械均搭载基于北斗定位技术的自动驾驶系统作业。
2.2 试验方法
垄体直线度:借助RTK测量定位仪,对生菜开沟起垄和胡萝卜起垄播种作业的轨迹进行作业直线度测定,地头与地尾10m距离为非测量区,在1行作业长度内平均取点,计算点与点之间的离散度。
相邻垄距:测量生菜开沟起垄和胡萝卜起垄播种作业后邻接两垄之间的距离,地头与地尾10m距离为非测量区,在1个作业长度内平均取5个邻接垄对称点,对称两点应保持在同一水平线上,测量每组对称点之间的距离,从而计算相邻垄距的最大值、最小值和平均值,各测20组数据。生菜开沟起垄设定标准垄距140cm,胡萝卜播种设定的标准垄距为60cm。
3 试验结果与分析
3.1 直线度
生菜开沟起垄和胡萝卜起垄播种作业后,对数据进行测量和统计,计算分析列表如表1所示。

表1 生菜和胡萝卜机械化作业直线度回归统计结果
由直线度回归统计结果可知:生菜开沟起垄作业中,自动驾驶起垄作业调整后的拟合系数R2为0.999997174,人工驾驶作业调整后的拟合系数R2为0.999986795,自动驾驶作业的拟合系数与人工驾驶相比更接近于1,说明自动驾驶作业回归模型拟合效果更好,观测点离散程度更小,更接近于一条直线。
胡萝卜起垄播种作业中,自动驾驶作业调整后的拟合系数R2为0.998903,人工驾驶作业调整后的拟合系数R2为0.998104,自动驾驶作业调整后的拟合系数R2大于人工驾驶,说明自动驾驶作业与人工驾驶作业相比更接近于一条直线。由此可见,利用自动导航驾驶系统辅助作业的直线度要优于人工驾驶。
3.2 相邻垄距
分别对人工驾驶和自动导航辅助驾驶生菜开沟起垄、胡萝卜起垄播种机械化作业后相邻垄距进行测定,并分析求出最大值、最小值、平均值、标准差和变异系数,具体数据列表如表2所示。
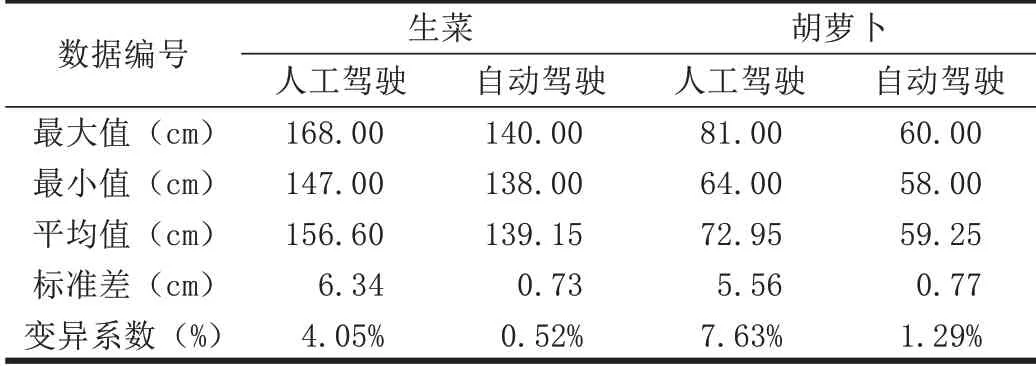
表2 人工驾驶和自动驾驶作业相邻垄距测量结果
由表可知,在测定的数据中,生菜开沟起垄人工驾驶作业相邻垄距最大值为168.00cm,最小值为147.00cm,平均值为156.60cm,变异系数为4.05%;自动驾驶作业相邻垄距最大值为140.00cm,最小值为138.00cm,平均值为139.15cm,变异系数为0.52%。胡萝卜起垄播种人工驾驶作业相邻垄距最大值为81.00cm,最小值为64.00cm,平均值为72.95cm,变异系数为7.63%;自动驾驶作业相邻垄距最大值为60.00cm,最小值为58.00cm,平均值为59.25cm,变异系数为1.29%。
自动导航驾驶最大偏差均在2.00cm以内,远小于人工驾驶,变异系数也远小于人工驾驶。因此,利用自动导航驾驶系统辅助进行机械化作业能够减小相邻垄之间的多余空白地带,提高土地利用率。且自动导航驾驶作业时,驾驶员只需了解机器运行操作规程以及控制田头转弯即可,大大降低了劳动强度。
4 土地利用率
在生菜机械化作业中,人工驾驶和自动驾驶分别作业1.67hm2左右,试验地块均由11个面积为0.13hm2和1个面积为0.20hm2、长30m的小地块组成,对于面积为0.13hm2的地块来说,其地块宽为44.4700m,人工驾驶1个作业宽度为1.5660m,自动导航驾驶1个作业宽度为1.3920m。因此,人工驾驶作业次数为28.40次,自动导航驾驶作业次数为31.95次,自动导航驾驶作业比人工驾驶作业多接近3个作业宽度。对于面积为0.20hm2的地块,其地块宽为66.7000m,人工驾驶作业次数为42.59次,自动导航驾驶作业次数为47.92次,自动导航驾驶作业比人工驾驶作业多接近5个作业宽度。因此,生菜起垄自动导航驾驶作业与人工驾驶作业相比土地利用率提高了9.52%。
在胡萝卜机械化作业中,人工驾驶和自动驾驶分别作业3.33hm2,均由10个面积为0.33hm2、长60m的小地块组成,则地块宽为55.5800m,人工驾驶1个作业宽度为2.6095m,自动导航驾驶1个作业宽度为2.3925m。因此,人工驾驶作业次数为21.30次,自动导航驾驶作业次数为23.23次,自动导航驾驶作业比人工驾驶作业多2个作业宽度,胡萝卜播种自动导航驾驶作业与人工驾驶作业相比土地利用率提高了8.61%。
5 自动导航系统在农机作业的应用建议
自动导航驾驶的作业质量与前期土地耕整质量密切相关,建议在利用自动导航驾驶系统进行起垄、播种作业前,应尽可能提高土地耕整质量,并与卫星平地技术等各项精细农业技术结合使用。
农机自动导航驾驶系统使用时受环境影响比较大,接收机在极端环境中无法使用。同时,受地势遮挡或离基站远等原因影响,信号场强弱不同,会出现信号接收不稳定的情况,建议多建固定基站,扩大基站覆盖面积,提高系统使用的便携性及稳定性。同时,加强对拖拉机的优化,使其能够适应地势不平坦区域的作业,提高农机自动导航的应用范围。
前大部分拖拉机驾驶员文化水平较低,缺乏自动控制和计算机的知识,烦琐的安装和调试工作会增加其使用难度,建议在系统和技术研发时提高设备使用的便捷性,同时,加强对使用者的系统化技术培训和指导。
