多位姿下肢康复机器人床身高度自动调整算法
2021-12-08陈琳张学涛李浪王号李泰薇潘海鸿
陈琳,张学涛,李浪,王号,李泰薇,潘海鸿
广西大学机械工程学院,广西南宁市 530004
机器人技术在康复医学领域得到迅速发展[1-3]。下肢康复机器人是康复机器人的重要分支,与传统治疗对比,其康复训练过程更稳定,可根据不同患者制定规范科学的康复计划,提高康复训练效率[4-8]。
下肢康复训练主要在肢体的矢状面进行,旨在促进患肢力量恢复,提高各关节运动协调能力[9-11]。卧式下肢康复机器人是一种特殊的下肢康复设备,适用于脑卒中患者早期康复和长期卧床偏瘫患者下肢康复,可改善患者下肢血液循环,防止关节僵化[12-14]。史小华等[15]设计的一款固定卧式训练系统,采用机械腿结构,实现矢状面内髋、膝和踝关节转动,但无法进行直立状态下的步态训练。谢能刚等[16]开发的下肢康复机器人,能够在平躺状态下完成踏步运动,但需要在训练前手动调节床身与水平面的角度,当驱动髋关节时,脚踏板的弹簧装置可以调节训练过程中的角度。Feng 等[17]设计的被动训练下肢康复机器人LLR-Ro,通过调整可移动座椅实现坐、卧训练姿势,但调整方式为手动,无法设定具体角度,仅针对卧姿下的步态轨迹进行分析验证,无法保证其安全性。Wang等[18]提出一种混合式(平行串行)下肢康复机器人,可以在坐、卧、站三种姿势下训练,但未能自动调节座椅高度。多体位智能康复机器人系统Flexbot[19]具有机器人步态训练、虚拟行走互动训练、步态分析功能,但床身基础高度较高,且穿戴复杂。
下肢康复机器人系统涉及设备、康复训练师和患者的多方交互,设备安全性是首要关注点[20-23]。由于患者的个体差异,康复训练时需要康复医师调整床身的高度和倾斜角度[24]。如调整不恰当,训练过程中可能发生康复机器人下肢末端与地面碰撞,存在安全隐患,甚至对患者造成二次伤害。本研究根据患者腿长建立不同训练模式下,不同位姿约束下床身高的数学模型,仿真和实验验证该算法的可靠性。
1 资料与方法
1.1 一般资料
自主研发的多位姿下肢康复机器人(multi-position lower limb rehabilitation robot,SMPR)本体结构主要由床身升降架、床身、大小腿杆、推杆和推杆支撑架组成(图1);根据患者康复情况,床身可调节的角度范围0°~90°,大小腿杆长度可调节,以适应患者腿长的差异。下肢康复机器人简化模型见图2。10 名志愿测试者均为本课题组学生,男性,年龄24~27 岁,腿长数据见表1。根据人体肢体活动范围,采用模型法规划6种训练步态(图3)。运动学分析得到各种步态的关节运动角度范围。见表2。

图1 下肢康复机器人本体结构

图2 下肢康复机器人简化模型

图3 下肢康复机器人训练步态示意图

表1 不同测试者的腿长数据(mm)

表2 六种步态模式的关节约束条件
1.2 方法
1.2.1 腿杆静力学分析
SMPR 腿杆为悬臂梁结构,需考虑其挠性变形的影响。人体大小腿质量分别占人体质量约10%和6%。以SMPR 能承受的最大人体质量110 kg 对腿杆施加载荷,分析腿杆挠性变形。
对于多位姿下肢康复机器人,当腿杆结构所受载荷与腿杆垂直时,挠性变形量最大,分析此时腿杆的变形量。根据大小腿的重量分布,在大小腿托上施加载荷,在髋关节处施加固定约束(图4a)。腿杆材料为钛合金,在不考虑结构间隙情况下,静力学分析结果(图4b)显示小腿杆末端由于挠性变形产生的最大位移量约为1.8 mm,发生在垂直于腿杆的Y 方向。经测量,髋关节的装配间隙为0.2 mm。考虑间隙和挠变影响,小腿末端在Y、Z 方向产生最大的位移量分别为4.6 mm 和0.66 mm。间隙和挠变产生的位移发生在康复机器人关节约束条件(表2)内,不会影响床身高度理论计算。

图4 腿杆静力学分析
1.2.2 6种步态模式下床身高度模型
下肢简化模型(图2)中,H为床身高度,Δh为小腿杆末端距离床身底架的最小安全距离,l1为大腿杆长度,l2为小腿杆长度,θ1为髋关节角度,θ2为膝关节角度,β为床身倾斜角度,k为床身底板轴承与髋关节轴线的距离。

6种步态下的床身高度为:



学校计算机实验教学中心的功能主要承担全校计算机公共课实践教学、部分院(系)专业课的计算机应用软件课程教学、学校各类无纸化考试与培训、学生课下业余自主学习、师生网络文献查询等应用需求。因此,学校计算机实验教学中心建设要一切从学校办学实际和特色发展出发,由学校统一规划、合理布局。根据学校在校生人数、各分校区人数、学科专业特点,以学生为本位,建设一个“规模化,功能化、网络化、高效化、安全化、规范化、节约化”的计算机实验教学中心,有利于地方高校提高教学质量,全面培养学生计算机实践能力。


其中r为圆周的半径。

其中a为椭圆长半轴,b为短半轴。
2 实验验证
2.1 理论计算
根据表1 中不同测试者的腿长数据,计算6 种模式下β变化所对应的H。床身高度初始值设为350 mm,随着β增加,6 种模式均需要相应调整床身高度。以椭圆模式为例,β与H呈正相关趋势(图5)。
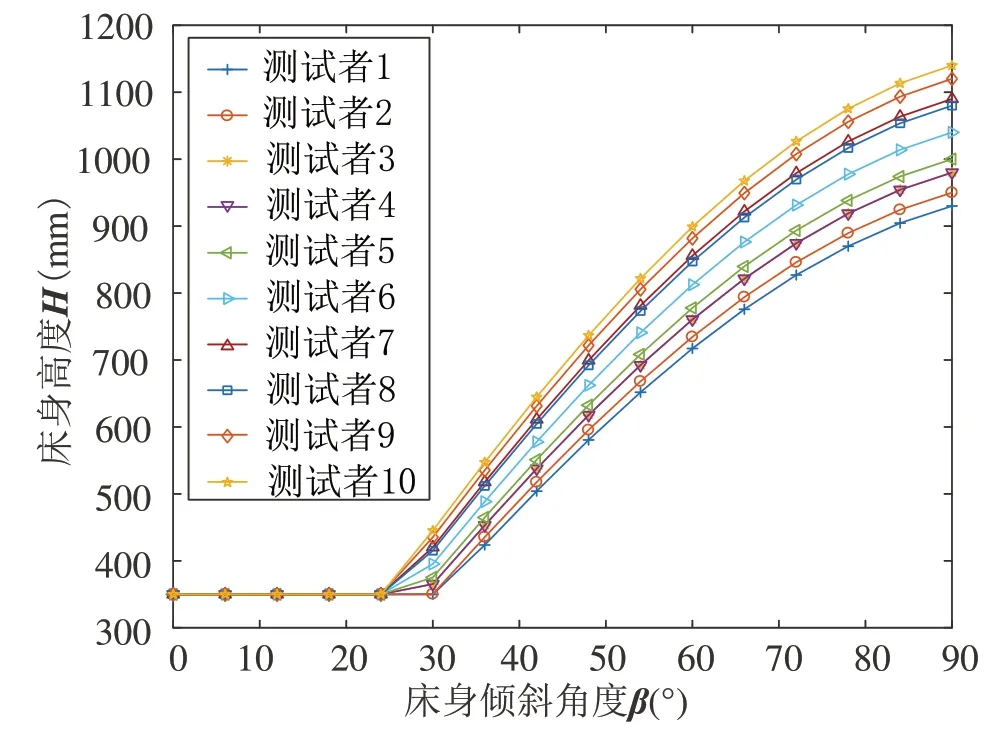
图5 椭圆模式下H与β关系
以测试者2 腿长为例,6 种模式下,β与H变化曲线见图6。其中,膝关节模式需在β≥5°时调整H;小圆弧/直线模式需在β≥30°时调整H;在小圆弧/直线模式下,H相对β的变化最为显著。

图6 测试者2在6种训练模式下H与β关系
2.2 验证
采用SMPR 物理样机验证所建立的床身高度变化数学模型,编程实现SMPR 床身自动调整。通过SMPR 操作界面输入患者大腿、小腿长,选择训练模式和床身倾斜角度。
在样机大腿、小腿杆末端安装加速度传感器,不同模式与不同床身倾斜角度下,采集训练过程中小腿杆末端加速度。测试者1 和测试者2(髋关节最大活动度分别为50°和32°,膝关节最大活动度均为90°)相同模式下进行对比试验。
2.2.2 小腿杆末端距地面高度测试
以测试者3(l1=518 mm,l2=440 mm)在β为30°和60°时,测量6 种模式下小腿杆末端距地面的实际高度。
2.2.3 床身倾角与高度
以测试者2(l1=460 mm,l2=440 mm)进行膝关节模式和圆周模式训练时,测量不同床身倾角时的床身实际高度。比较测试数据和理论数据。
3 结果
3.1 腿杆末端抖动测试
以圆周模式和膝关节模式为例,在β分别为0°、30°、60°和90°时,圆周模式下腿部支架加速度大于膝关节模式(图7),且随着β增大,加速度随之增大。在相同β与训练模式下,小腿支架末端加速度大于大腿支架。
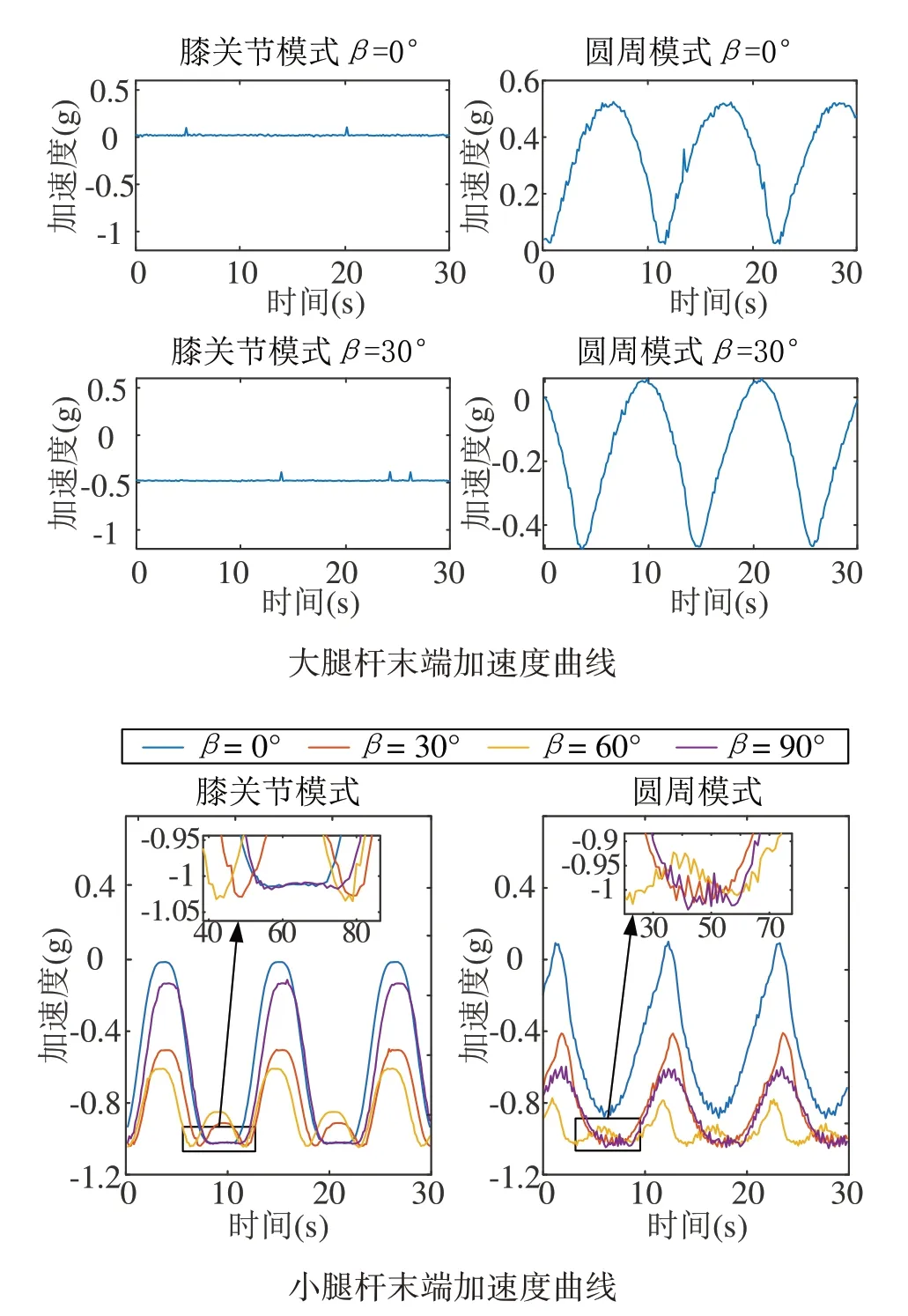
图7 膝关节模式和圆周模式腿杆末端加速度曲线
在β为0°和30°时,测试者1 腿部支架加速度大于测试者2。大小腿支架的抖动发生在垂直于腿杆的方向,抖动不会影响床身高度理论计算(图8)。

图8 两名测试者膝关节模式和圆周模式小腿杆末端加速度曲线对比
3.2 小腿杆末端距地面高度测试
分别设定Δh为40 mm 和50 mm,β为30°和60°,6种模式下,小腿杆末端距地面高度h始终大于Δh(图9),床身高度自动调整算法有效。
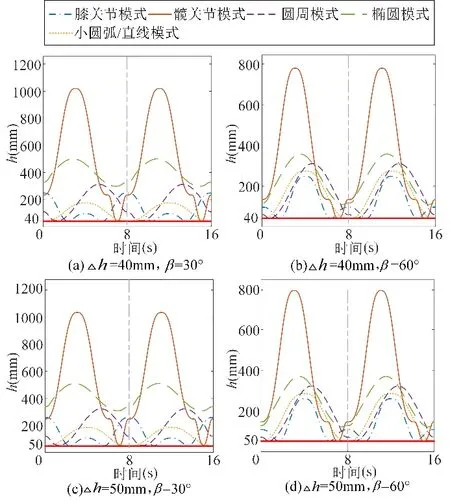
图9 两个训练周期床身倾斜训练时最低点离地高度
3.3 床身倾角与高度
训练周期中,床身实际高度与理论计算高度保持一致(图10)。
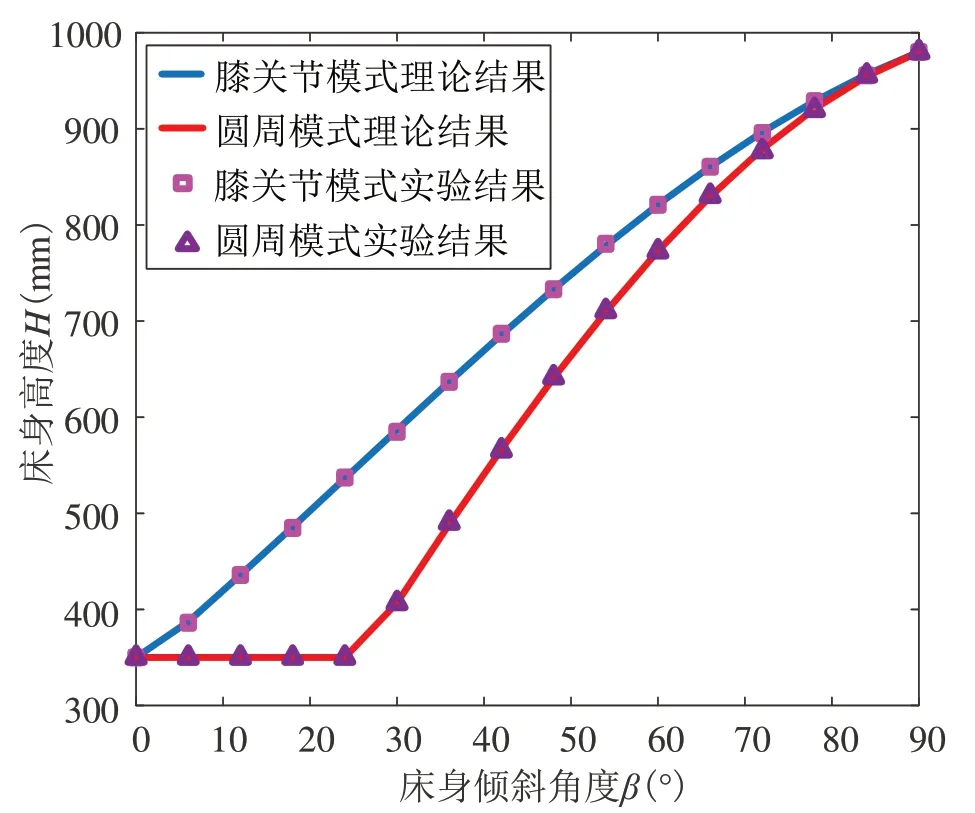
图10 床身高度与倾斜角度的关系
4 讨论
为保证康复训练时患者与设备的安全,避免床身与地面发生碰撞,对自主研发的多位姿下肢康复机器人平台,建立不同模式下,床身高度与患者腿长及床身翻转角度的数学模型,规划床身调整,并进行实验验证。
腿部支架抖动虽不会影响床身高度计算,但抖动使训练中设备的平稳性和柔顺性变差,影响患者使用体验和康复效果。拟通过输入整形、轨迹优化和构建陷波滤波器等方法抑制腿杆末端抖动。
多位姿下肢康复机器人间隙和挠变不影响床身高度理论计算,床身高度自动调整算法适用于SMPR,可避免在康复训练时的安全隐患,提高患者与设备的安全性。
利益冲突声明:所有作者声明不存在利益冲突。
