移动机器人避障模糊控制仿真研究
2021-11-20马辉
马辉

【摘 要】 当前,移动机器人在躲避障碍物过程中,导致输出误差较大,不能很好地跟踪期望运动轨迹。本文借助于仿真软件MATLAB对机器人避障效果进行验证,结果表明:采用传统PID控制器,机器人虽然能够避开障碍物,但是输出误差较大,控制系统不稳定。采用模糊控制器,机器人不仅能够躲避障碍物,而且输出误差较小,控制系统相对稳定。采用模糊控制器,移动机器人自适应调节能力强,不仅可以躲避障碍物的干扰,而且输出误差较小。
【关键词】 移动机器人;模糊控制器;二次线性调节器;避障;仿真
【中图分类号】 TH112 【文献标识码】 A 【文章編号】 2096-4102(2021)05-0094-03
一直以来,控制系统都是阻碍机器人发展的重要问题,必须对机器人控制系统进行改进,才能在未来发展中占据市场。对此,本文建立了移动机器人运动模型简图,结合理论和实际运动轨迹定义了机器人运动误差模型,将误差模型进行线性化。
1移动机器人
1.1运动学模型
移动机器人简图模型在直角坐标系中如图1所示。
假设移动机器人不能横向滑动,其运动学模型如下:
[xyθ=cosθ 0sinθ 0 0 1vw] (1)
式中:x、y、θ为移动机器人实际运动坐标;v、w分别为实际线速度和角速度。
1.2运动误差模型
移动机器人运动误差定义为:
[exeyeθ= cosθ sinθ 0-sinθ cosθ 0 0 0 1xr-xyr-yθr-θ] (2)
式中:xr、yr、θr为移动机器人参考运动坐标。
考虑到移动机器人具有如式(1)所示的运动学模型,通过推导式(2)得到如下运动学模型:
[exeyeθ=sineθ 0coseθ 0 0 1vrwr+-1 ey0 -ex0 -1 u] (3)
式中:vr、wr分别为参考线速度和角速度;u为反馈控制输入。
u定义如下所示:
[u=uF+uB=vrcoseθwr+vw] (4)
式中:uF、uB分别为控制器输入和输出。
将上述模型线性化后可以得到如下所示:
[exeyeθ= 0 wr 0-wr 0 vr 0 0 0exeyeθ+-1 0 0 0 0 -1vw] (5)
方程式(5)为状态空间形式,定义为e′=Ae+Bu。
2控制器设计
2.1 T-S模糊建模
T-S模糊模型是Takagi和Sugeno提出的一种多模型建模方法。方程(5)所描述系统的T-S模糊模型的第i条规则如下:
如果w1(t)为Fi1,···,wg(t)为Fig,那么e(t)′=Aie(t) +Biu(t)。
w1(t),w2(t),···,wg(t)为假定变量,Fig为模糊集,i=1,2,···,L。L为模糊规则个数,并且Ai∈Rn×n,Bi∈Rn×m分别为状态矩阵和输入矩阵。
整个模糊系统推断如下:
[e(t)=i=1Lμi(w(t))Aie(t)+Biu(t)i=1Lμi(w(t))] (6)
令hi=μi/Σμi为第i个模糊规则的激活函数,方程式(6)被写成:
[e(t)=i=1Lhi(w(t))Aie(t)+Biu(t)] (7)
式中:w(t)=[w1(t),w2(t),···,wg(t)]。
对于i=1,2,···,L,μ(μi(t))≥0,激活函数具有以下性质:
[i=1Lhi(w(t))=1] (8)
T-S模糊控制器的第i条规则如下:
如果w1(t)为Fi1,···,wg(t)为Fig,那么u(t)= -Kie(t)。其中,i=1,2,···,L。Ki为状态反馈增益。
通过与全局模糊系统的匹配,将全局模糊控制器写成:
[u(t)=-i=1Lhi(w(t))kie(t)] (9)
将式(9)代入式(7),得到闭环系统:
[e(t)=i=1Li=1Lhi(w(t))hj(w(t))Ai-BiKje(t)]
(10)
2.2线性二次型调节器
线性二次型调节器是设计线性状态反馈控制器最常用的现代控制方法。它包括寻找一个使二次成本函数最小化并保证线性系统稳定性的最优控制律。由于我们使用的是误差状态空间模型,控制问题的形式如下,计算最优控制律为:
[u(t)=-Ke(t)] (11)
使二次型性能指标最小化为:
[J=∞t0(eTQe+uTRu)dt] (12)
控制线性系统为:
[e(t)=Ae(t)+Bu(t)] (13)
其中:
[K=R-1BTP] (14)
P是下列方程的解,如下所示:
[PA=ATP+Q-PBR-1BTP=0] (15)
式中:Q为控制收敛速度的半正定矩阵;R为惩罚控制输入的正定矩阵。
该控制程序对T-S模糊模型的每个子系统都适应。采用线性二次型调节器作为避障控制器,通过模糊逻辑控制器实时调整其权值矩阵。
移动机器人的控制输入如下:
[v=(1-F)vT+Fvobw=(1-F)wT+Fwob] (16)
由于机器人具有前进速度和转向能力,必须对其加以限制,以防止移动机器人打滑或侧翻。
假设速度和加速度限制为:
[v≤vmaxw≤wmaxaT=dv/dt≤aT,maxaL-kv2≤aL,max] (17)
式中:vmax和wmax分别为最大线速度和角速度;aT、aL、aT,max和aL,max分别为纵向加速度、横向加速度、最大纵向加速度和横向加速度;κ=v/w。
实际速度(vc,wc)及实际加速度(aTc和aLc)应该满足如下条件:
如果|v|/vmax>1,并且|v|/vmax>|w|/wmax,那么
[vc=sign(v)vmaxwc=wvmax/vaTc=sign(aT)aT,maxaLc=aLaT,max/a] (18)
如果|w|/wmax>1,并且|w|/wmax>|v|/vmax,那么
[vc=vwmax/wwc=sign(w)wmaxaTc=aTaL,max/aLaLc=sign(aL)aL,max] (19)
如果|v|/vmax<1,并且|w|/wmax<1,那么
[vc=vwc=waTc=aTaLc=aL] (20)
在所提出的控制系统时,必须根据机器人的摩擦力和质量,选择合适的参数aT,max和aL,max,以保证机器人不会打滑。
3误差仿真
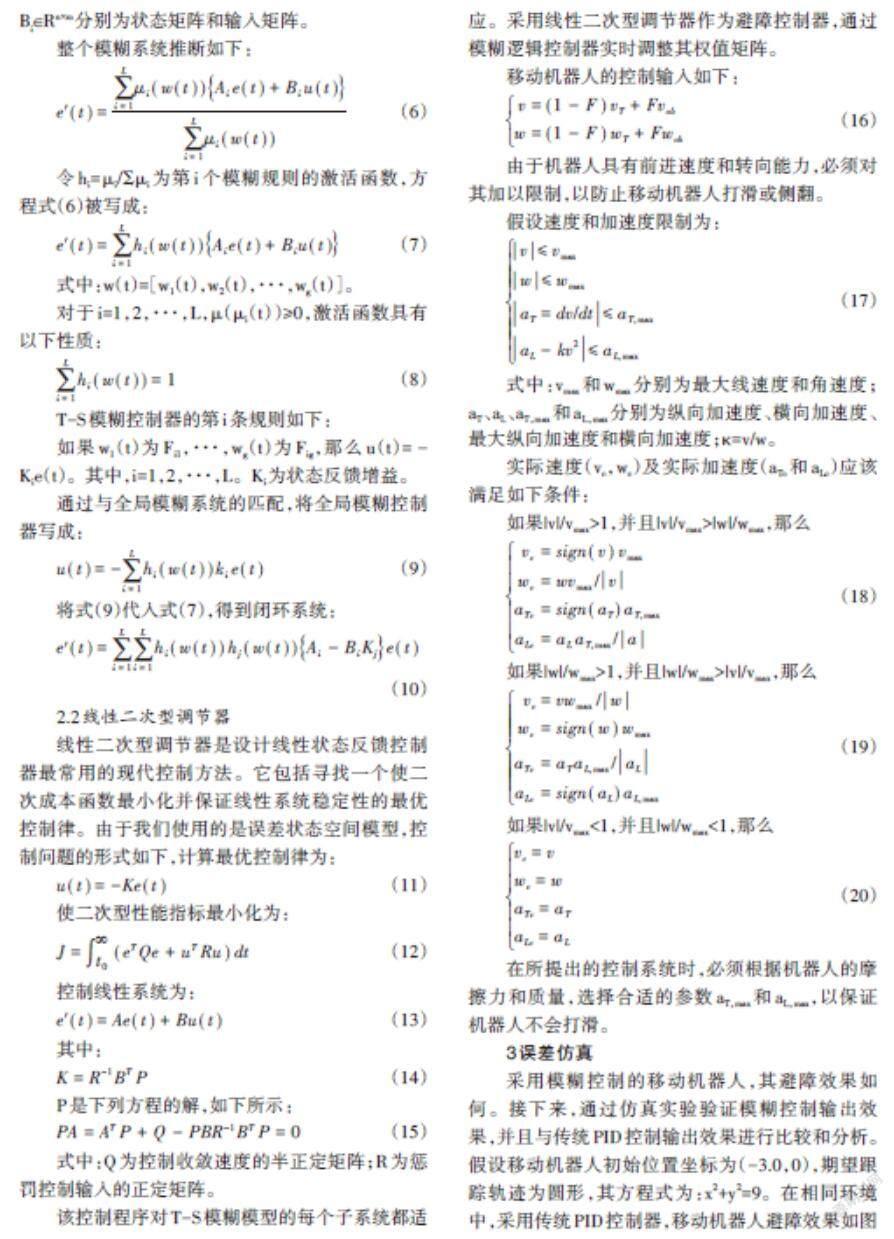
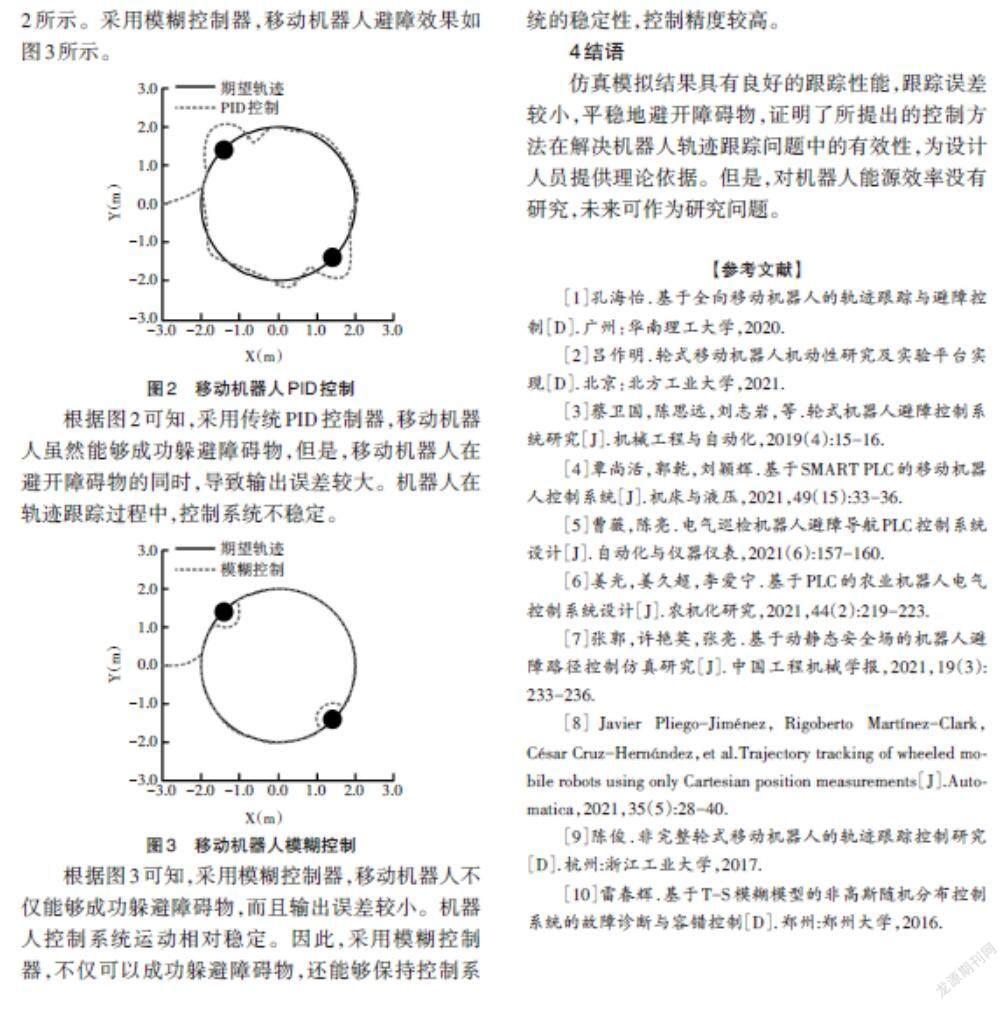
采用模糊控制的移动机器人,其避障效果如何。接下来,通过仿真实验验证模糊控制输出效果,并且与传统PID控制输出效果进行比较和分析。假设移动机器人初始位置坐标为(-3.0,0),期望跟踪轨迹为圆形,其方程式为:x2+y2=9。在相同环境中,采用传统PID控制器,移动机器人避障效果如图2所示。采用模糊控制器,移动机器人避障效果如图3所示。
根据图2可知,采用传统PID控制器,移动机器人虽然能够成功躲避障碍物,但是,移动机器人在避开障碍物的同时,导致输出误差较大。机器人在轨迹跟踪过程中,控制系统不稳定。
根据图3可知,采用模糊控制器,移动机器人不仅能够成功躲避障碍物,而且输出误差较小。机器人控制系统运动相对稳定。因此,采用模糊控制器,不仅可以成功躲避障碍物,还能够保持控制系统的稳定性,控制精度较高。
4结语
仿真模拟结果具有良好的跟踪性能,跟踪误差较小,平稳地避开障碍物,证明了所提出的控制方法在解决机器人轨迹跟踪问题中的有效性,为设计人员提供理论依据。但是,对机器人能源效率没有研究,未来可作为研究问题。
【参考文献】
[1]孔海怡.基于全向移动机器人的轨迹跟踪与避障控制[D].广州:华南理工大学,2020.
[2]吕作明.轮式移动机器人机动性研究及实验平台实现[D].北京:北方工业大学,2021.
[3]蔡卫国,陈思远,刘志岩,等.轮式机器人避障控制系统研究[J].机械工程与自动化,2019(4):15-16.
[4]覃尚活,郭乾,刘颖辉.基于SMART PLC的移动机器人控制系统[J].机床与液压,2021,49(15):33-36.
[5]曹薇,陈亮.电气巡检机器人避障导航PLC控制系统设计[J].自动化与仪器仪表,2021(6):157-160.
[6]姜光,姜久超,李爱宁.基于PLC的农业机器人电气控制系统设计[J].农机化研究,2021,44(2):219-223.
[7]张郭,许艳英,张亮.基于动静态安全场的机器人避障路径控制仿真研究[J].中国工程机械学报,2021,19(3): 233-236.
[8]Javier Pliego-Jiménez,Rigoberto Martínez-Clark,César Cruz-Hernández,et al.Trajectory tracking of wheeled mobile robots using only Cartesian position measurements[J].Automatica,2021,35(5):28-40.
[9]陳俊.非完整轮式移动机器人的轨迹跟踪控制研究[D].杭州:浙江工业大学,2017.
[10]雷春辉.基于T-S模糊模型的非高斯随机分布控制系统的故障诊断与容错控制[D].郑州:郑州大学,2016.
