连续梁桥水平转体结构转体过程控制仿真分析*
2021-10-22郑晓毛徐伟炜
龚 博,郑晓毛,徐伟炜
(1.中交三航局第三工程有限公司,江苏 南京 210011;2.东南大学土木工程学院,江苏 南京 210096)
1 工程概况
江苏省常州市新建大明路在K0+832.09处上跨沪蓉高速公路,主桥采用3跨(56+90+56)m变截面预应力混凝土连续梁结构,桥梁总宽25m。在沪蓉高速公路两侧平行于公路方向搭设满堂支架现浇87m梁体,与桥墩临时固结成T形刚构后,顺时针旋转70.96°,现浇两侧9.5m直线段,施工边跨3m合龙段,最后施工中跨3m合龙段,完成全桥合龙。
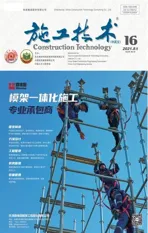
主桥转体梁平面如图1所示,其中6,7号墩为中墩,中墩下承台设计为正方形,上承台设计为圆柱形,上、下承台间设转动体系,转体重约10 076t。
图1 转体桥平面示意
2 T形刚构建模
转体施工桥梁转体质量大、转动角度大、梁体长,通过控制牵引力实现转体结构平稳转动是转体施工控制的重难点。采用软件SolidWorks以1∶1建立转体结构三维模型(见图2),模型分为位于底部固定的下承台和固定在承台上面的T形刚构转动体,将两者组成装配体,导入多体动力学仿真软件ADAMS,如图3所示。

图2 SolidWorks中的T形刚构
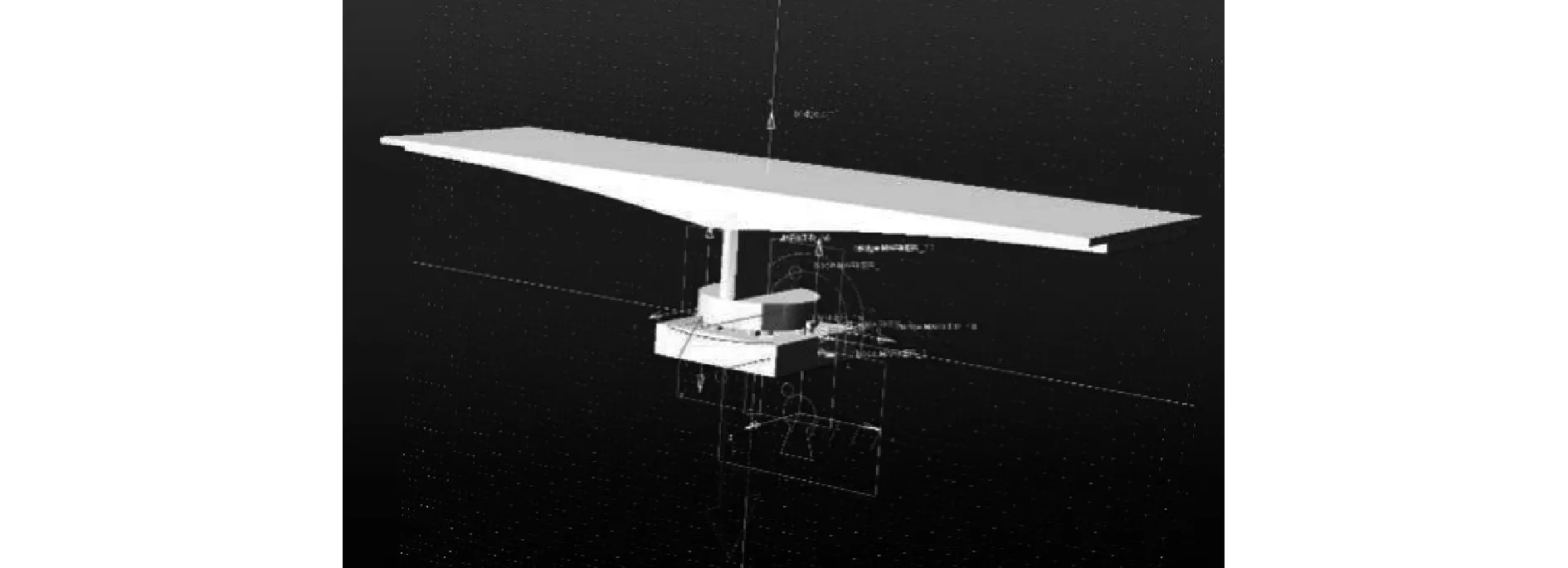
图3 ADAMS中的T形刚构
在仿真软件ADAMS中,设置桥梁的材料、质量、转动惯量等相关参数;设定下承台为固定副,上部结构球铰绕下承台中心处凹槽转动,可设定上部结构与下承台间为旋转副。实际转动过程中,牵引力矩克服摩阻力矩使结构转动,仿真时旋转副间的摩擦系数可通过称重试验获得[1]。
转动过程分为试转、正式转体及转体就位后的姿态精确调整过程[2]。转动过程的速度变化可分为启动时的加速转动、平稳转动时的匀速转动及就位前的减速过程。在减速阶段,需停止施加力矩,转动块借助惯性运行结束后,改为“手动”状态下点动操作,将转体逐渐精确转动到位。采用PID控制系统实现牵引力对转体速度的精确控制[3]。
3 T形刚构转动仿真控制
3.1 闭环控制系统的组成及PID控制
一个闭环控制系统通常由输入、干扰、反馈和输出等环节构成,如图4所示。
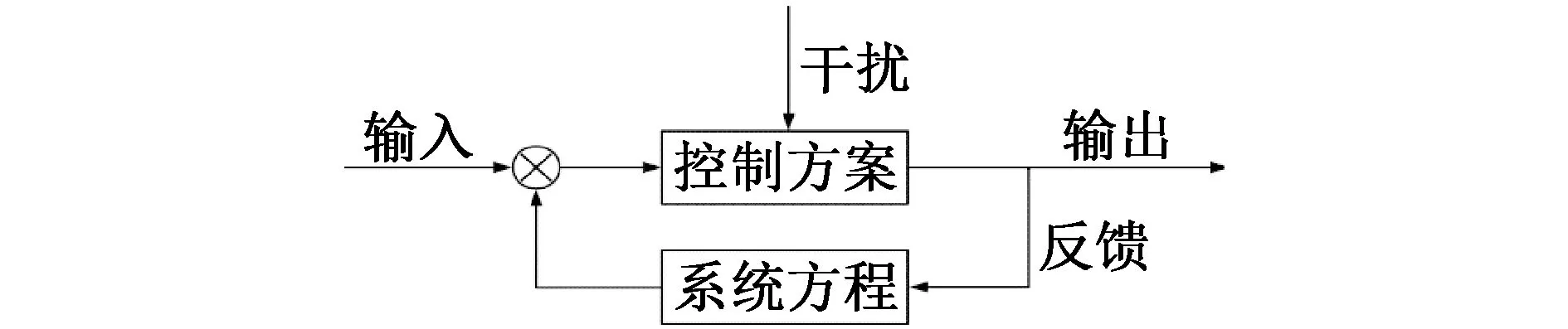
图4 控制系统基本组成
PID控制为现代控制理论和实际工程中运用最广泛的闭环控制方法[4],PID控制原理如图5所示。PID控制器主要由比例(P)、积分(I)和微分(D)等单元组成。PID控制器通过比较设定值r(t)与输出值c(t),有效控制偏差e(t) =r(t)-c(t),进行比例积分微分运算后,通过线性组合构成控制量。转体桥PID控制方案总体流程如图6所示。PID控制方案可由ADAMS/View中自带控制工具包完成,也可由ADAMS与MATLAB联合仿真控制完成。
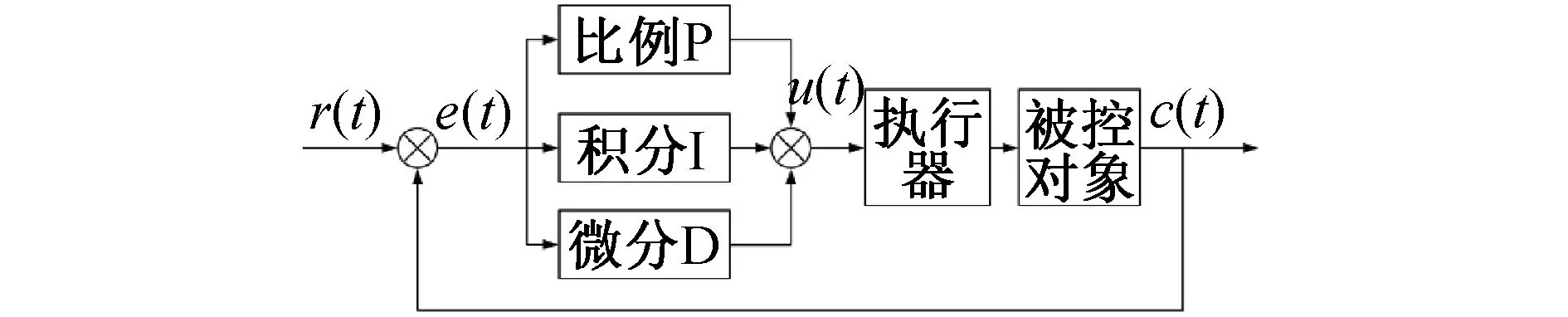
图5 PID控制基本原理
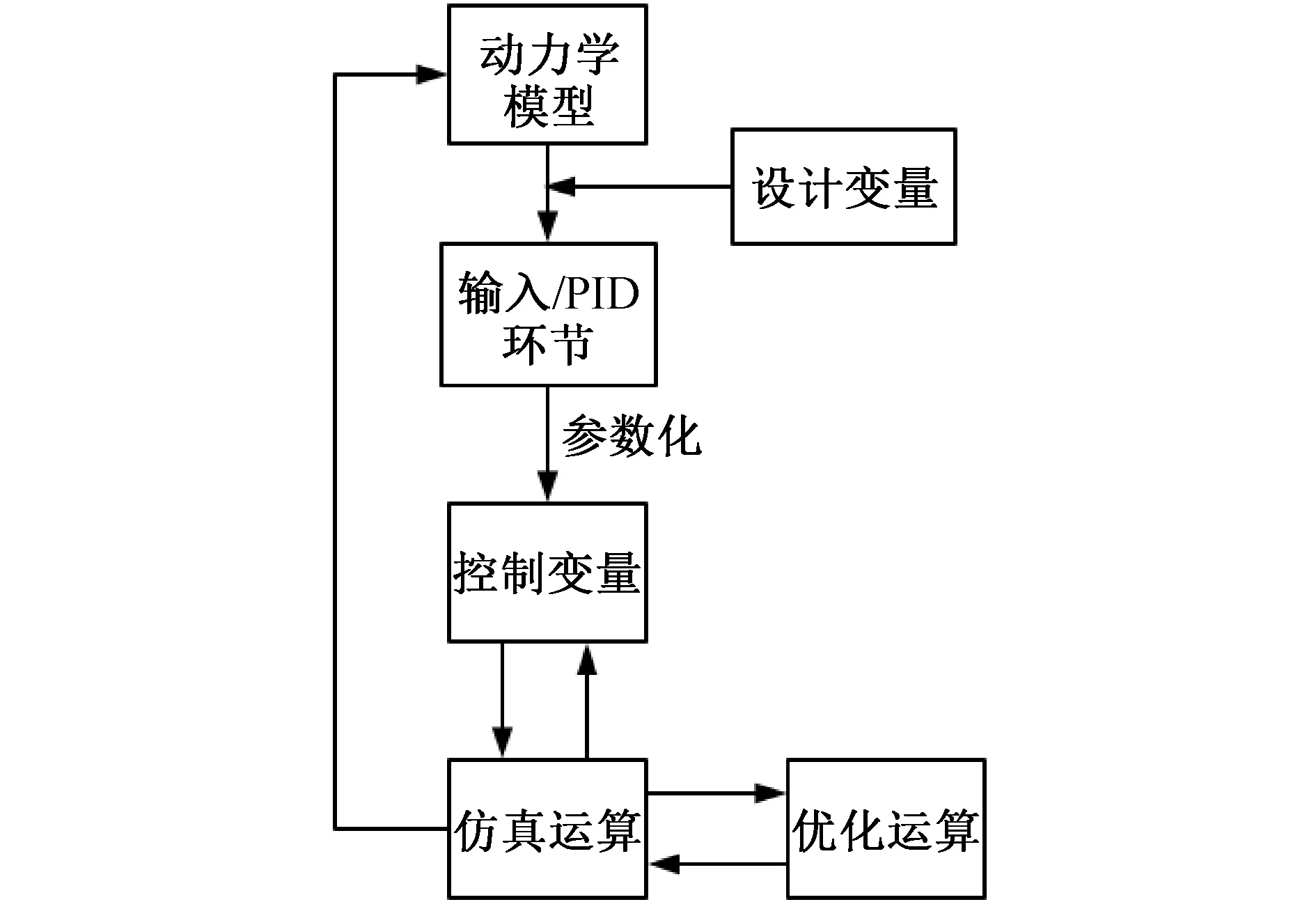
图6 控制方案总体流程
3.2 ADAMS/View控制方案
输入目标转速,在牵引力及摩阻力矩的影响下得出实际转速,以目标转速与实际转速的偏差值作为PID控制的输入值,通过PID控制牵引力输出,调节转动速度不断接近目标转动速度,控制方案如图7所示。
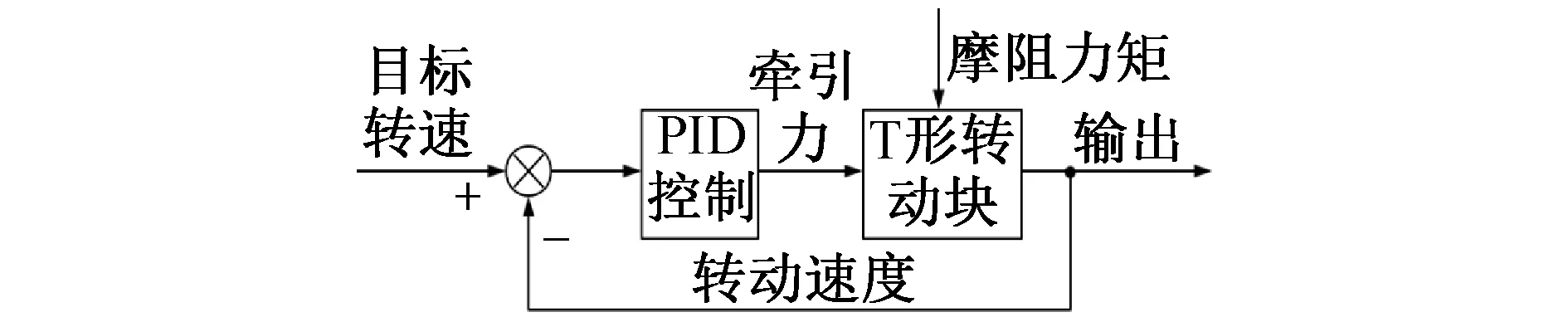
图7 转动块的PID控制方案
从系统的稳定性、响应速度、超调量及稳态精度等各方面考虑P,I,D 3个增益系数的取值。本文根据经验用凑值法完成参数设置,取值时考虑P使反应变快、D使反应提前、I使反应滞后等调节规律。
根据以上规律,先按经验设置PID参数,然后根据因变量曲线固定P,再根据曲线波动调节I,最后调节D。最终定义的P,I,D增益系数设计变量如表1所示,对其进行参数化,以便后续进行DOE(design of experiment,试验设计) 计算,寻找最优参数。
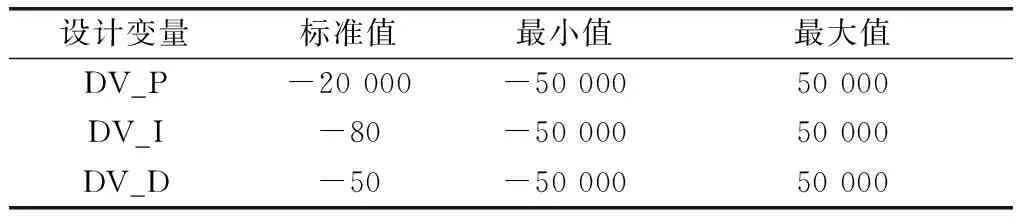
表1 PID增益系数设计变量
根据文献[5]要求,转动角速度应≤0.01~0.02rad/min,本文设定目标转速为0.015°/s。利用Controls Toolkit建立的输入环节如表2所示,为达到匀速转动,目标转动角加速度应为0,因此用0减去实际角加速度后输入PID控制器。同样通过 Controls Toolkit将前述设计变量和输入环节添加到PID控制模块,建立PID控制环节。
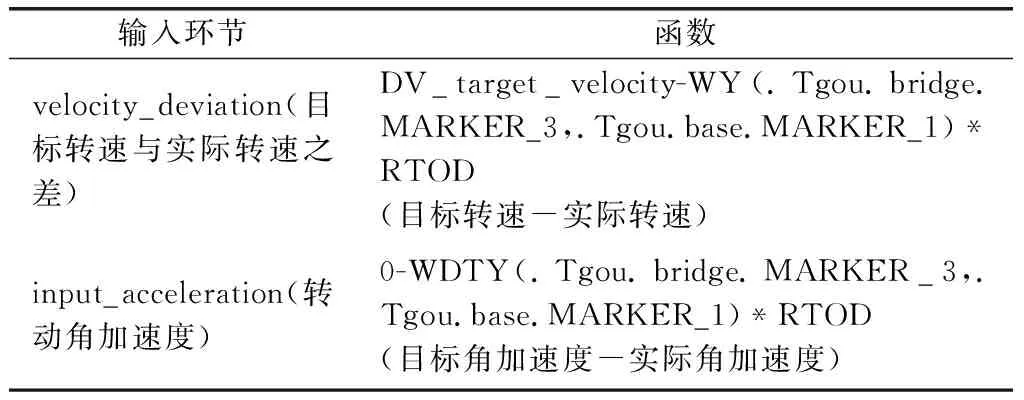
表2 PID控制器输入
分别测量转动牵引力、转动角速度、目标转速与实际转速差值,进行动力学仿真计算,设置仿真时间为1 000s,步数为100步。在后处理模块中查看仿真控制结果,牵引力随时间变化曲线如图8所示,T形刚构转动角速度随时间变化曲线如图9所示。

图8 牵引力变化曲线
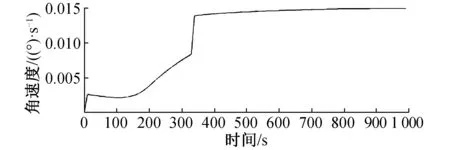
图9 角速度变化曲线
由图8可知,在静摩擦阶段,牵引力不断增大,最大为423kN,此后进入动摩擦阶段,动摩擦时牵引力下降至317kN,并保持不变。
由图9可知,在静摩擦阶段,T形刚构速度<0.005°/s, 可看作静止状态,随着牵引力不断增大,转体结构由静摩擦转入到动摩擦,速度发生突变,而后角速度缓慢达到目标控制速度并保持不变。
为寻找 P,I,D 3个增益系数的最优组合,进行DOE计算。共进行15次试验,最大角速度偏差曲线如图10所示,有几次试验中,最大角速度偏差几乎接近0,这表明P,I,D取值最优时,T形刚构转速与目标转速非常接近。
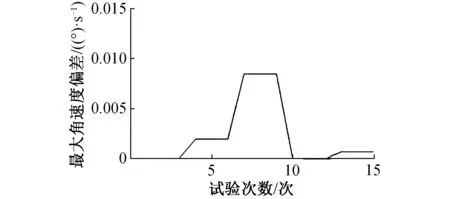
图10 最大角速度偏差曲线
3.3 ADAMS与MATLAB联合控制方案
利用ADAMS与MATLAB进行联合控制仿真[6-7],并与ADAMS控制仿真结果进行对比。在ADAMS中,先定义状态变量,即牵引力及目标速度与实际转速差值,再对牵引力进行参数化,将其导入建模工具条下的ADAMS/Controls,建立ADAMS与MATLAB的数据交换。在MATLAB中,运行MATLAB与ADAMS的接口命令adams_sys,出现Simulink窗口,如图11所示。S-Function为ADAMS非线性动力学计算模型,State-Space为线性化模型,adams_sub包含非线性方程及一些有用的变量。将adams_sub中的数据作为控制方案的一部分。

图11 Simulink中的ADAMS接口
在MATLAB/Simulink中建立控制方案,如图12所示,为对比2种控制方案的差别,使P,I,D 3个增益系数的取值与ADAMS/View控制方案中的设置一致。MATLAB与ADAMS联合仿真数据传递如图13所示。
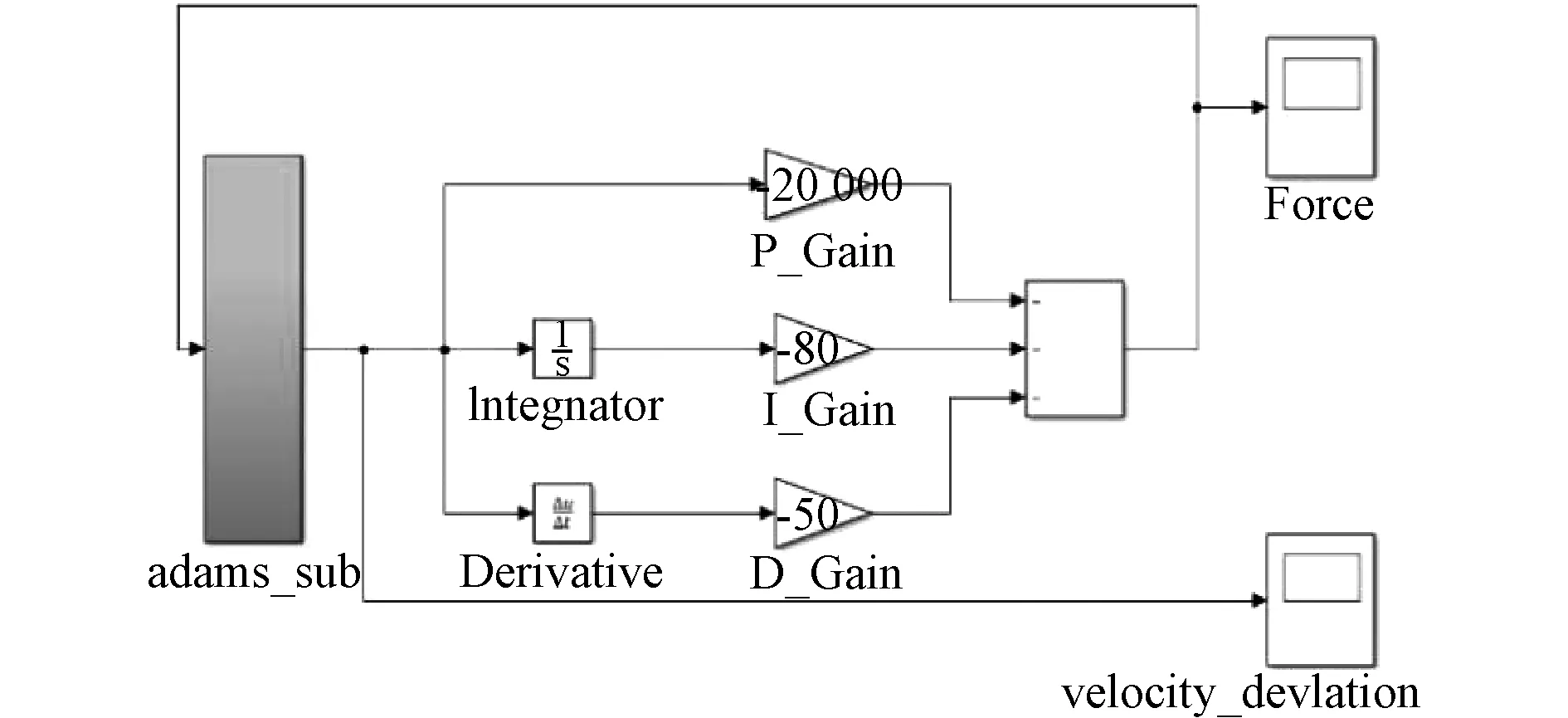
图12 MATLAB/Simulink中建立的控制方案
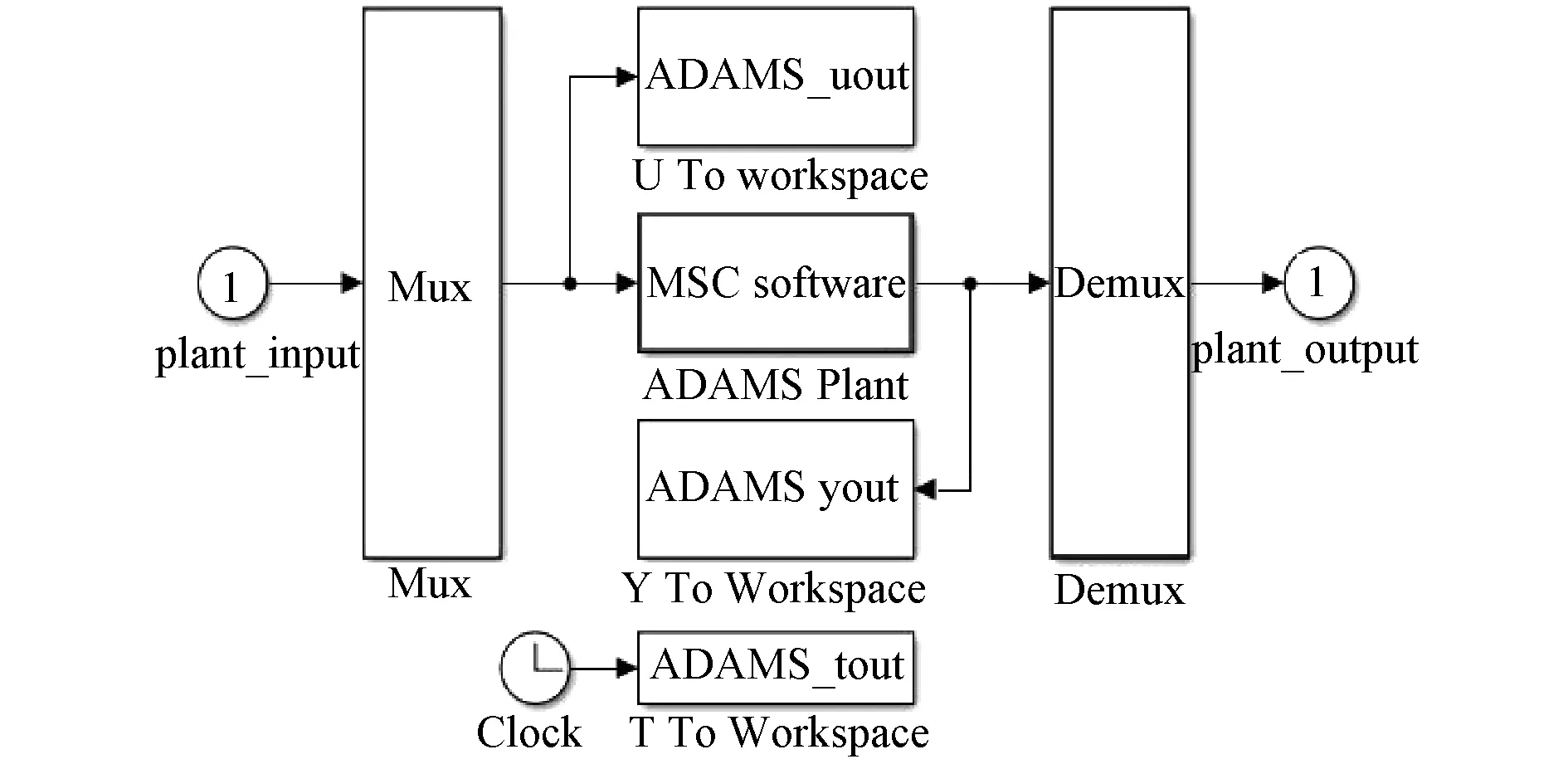
图13 ADAMS与MATLAB数据交换原理
ADAMS与MATLAB/Simulink联合仿真角速度和目标角速度偏差变化曲线如图14所示,与ADAMS/View控制方案中角速度变化曲线基本吻合,都较好地控制了转体桥从启动至目标速度的转动过程,表明ADAMS与MATLAB联合仿真可行,为采用MATLAB工具箱中的其他控制算法提供了思路。

图14 联合仿真角速度偏差变化曲线
在大明路转体桥实际施工过程中,转动体由人工控制2台千斤顶同步牵引实施转动。现场监测平稳转动时牵引力为300~400kN,仿真结果平稳转动时牵引力为317kN,说明仿真结果可为转体施工提供参考。
4 结语
1)多体动力学软件ADAMS可对转体桥梁转体施工过程进行控制仿真,给出结构从静止状态进入转动状态所需牵引力的变化过程。
2)ADAMS软件与MATLAB软件进行转动过程联合控制仿真可行,为采用MATLAB工具箱中的其他控制算法提供了思路。
3)仿真结果与现场实测情况接近,转体桥梁转体过程控制仿真可为转体施工提供参考。