基于PID的温度控制系统设计
2021-10-22田益民郑美俊宋方方
杨 帅,田益民,郑美俊,高 雪,宋方方
(北京印刷学院信息工程学院,北京 102600)
基于目前转型后的经济结构,智能化的温度控制系统[1]越来越受到人们的推崇,它有着更加突出的优点,比如节省人力、物力,更加安全可靠。在系统工作过程中经常需要测量的一个量便是温度,需要保持和控制的量也是温度。
在工业生产过程中,PID[1]控制算法是最常用的控制温度的方法,PID控制器具有的优点是原理简单、使用方便、控制精度高、算法成熟,使其成为系统控制的主要技术手段,尤其是对被控对象不是很清楚,又或者被控系统的结构参数必须依靠现场调节或者必须依靠经验来确定时,就目前来说最适合且最适合的方法便是PID控制。温度控制系统有许多弊端,如较大的惯性,比较严重的滞后性,很难建立较精确的系统数学模型,因此,需要PID控制器加以调节来改善温度控制系统的性能。
1 PID控制器
自动控制系统[2]的核心便是控制,目前的自动控制技术都是基于反馈理论的概念。反馈理论包括三个部分,即包括测量,比较和执行。对变量进行测量,在期望值做比较,用比较得到的误差来纠正调节系统的响应。如何更好地对系统进行校正,则成为自动控制技术应用的关键。
1.1 PID控制原理
线性连续系统的PID控制系统中包括PID控制器及其被控对象,其原理框图如图1所示:

图1 PID控制系统
线性连续系统的PID控制器是一种比例滞后—超前控制器,它是由比例(P)、积分(I)和微分(D)三个环节组成,再使得三个环节并联之后,在和系统中的被控对象串联所构成的一种控制器。PID控制器[3]的形式有P、PI、PD和PID四种结构形式。其中,P为比例控制,PI为比例滞后控制,PD为比例超前控制,PID为比例滞后—超前控制。
比例环节,微分环节,积分环节三者之间的关系如表1所示:

表1 比例环节,微分环节,积分环节对比
1.2 PID控制算法
PID控制器又叫作比例积分微分控制器,它是将比例(P)、积分(I)和微分(D)这三种调节方式组合而成,根据所用到的组合环节不同,所能起到的作用及组合而成的控制器也不尽相同,通过这些不同作用的控制器,便可以应用在相当范围的各类控制系统中,从而起到控制调节的作用,使得控制系统能达到我们所期望的功能。PID控制器算法及其相关的P(比例)控制器算法和PI(比例积分)控制器算法的表达式如下。
P(比例)控制器算法的线性表达式为:

2 控制系统的时域性能指标
在分析控制系统时,除了要考虑到系统的结构、参数等条件外,一个常用的方法便是通过系统的各项性能指标来分析,当用到系统性能指标有一个前提条件,便是系统必须是稳定系统。如果系统不稳定,则性能指标会计算不出来,会使得研究系统动态响应变得毫无意义。比较常用的系统性能指标[4]有tr(上升时间)、tp(峰值时间)、ts(调节时间)、σ%(最大超调量)、td(延迟时间)、N(振荡次数)和ess(稳态误差)。这七个指标都是时域性能指标其中,前六项属于瞬态性能指标;ess为稳态性能指标。良好的瞬态性能指标,可以使得系统拥有比较好的稳定性和系统响应更加快速;稳态性能指标决定了能否得到一个准确性的系统。
σ%(最大超调量)是指系统的单位阶跃响应的最大峰值Cmax与稳定状态值C(∞)需要满足一定量的条件,即应满足以下公式:

σ%一般应满足在5%~35%之间。对于单调变化的单位阶跃响应,系统的最大超调量为0。σ%(最大超调量)代表了系统的相对稳定性。
以上六个性能指标中,最重要且最经常使用的便是ts(调节时间)与σ%(最大超调量)。σ%(最大超调量)与N(振荡次数)可以反映系统的稳定性能。tr(上升时间)、tp(峰值时间)、ts(调节时间)和td(延迟时间)这四个性能指标可以反映系统的快速性。通过这六个性能指标可以分析出系统的动态响应,同时好的性能指标可以判断出系统拥有更好的时域性能,好的性能指标决定了一个好的系统。
稳态误差[5]可以用ess(Steady-State Errors)来表示。稳态误差用来描述系统的控制精度(控制准确度)。在工业生产中,我们常用到的便是0型系统、Ⅰ型系统和Ⅱ型系统,高于Ⅱ型系统的控制系统一般不常用,型号越高,代表着控制系统的精度就越高,但与此同时该系统的稳定性就会变得越差。
系统在输入为单位阶跃信号,斜坡信号和抛物线信号的作用下的不同类型的系统的稳态误差如表2所示:
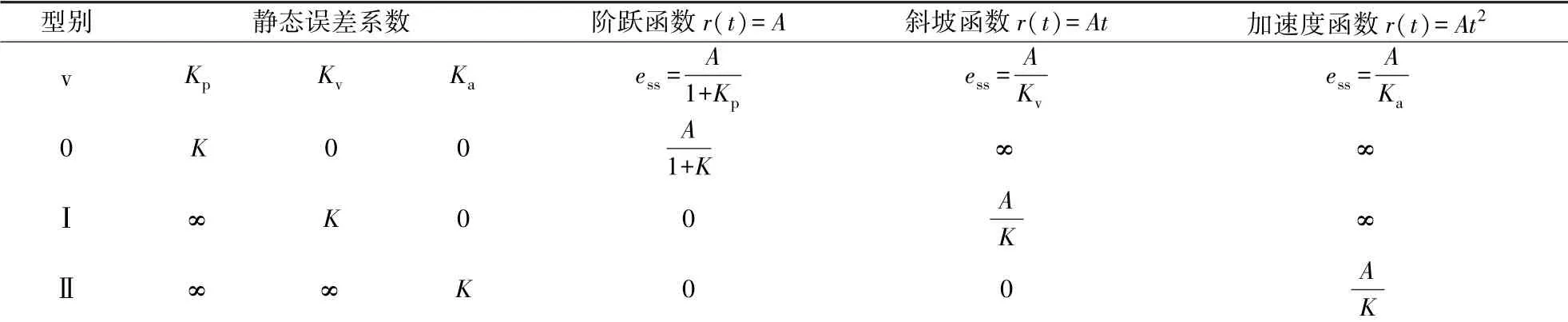
表2 给定输入下系统的稳态误差
其中,Kp表示位置误差系数;Kv代表着速度误差系数;Ka表示加速度误差系数。
3 温度控制系统的设计
温度控制系统[6]的组成包括调节器、执行机构、被控对象和测量装置等几部分组成。温度控制系统需要满足的最基本的性能[7]便是快速性。稳定性和准确性。根据需要的精度,选择不同的控制器,便能够得到适合的,令人满意的结果。温度控制系统流程如图2所示:
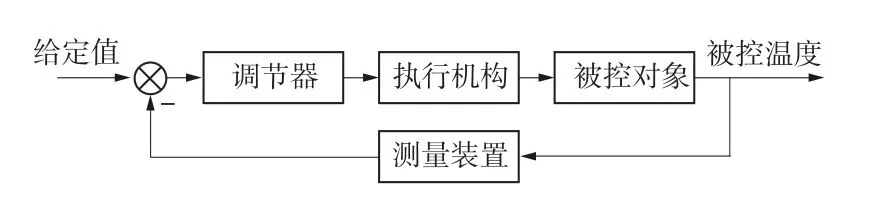
图2 温度控制系统结构图
温度控制系统模型可以表示为:

式中,K代表着过程对象的静态增益,τ表示过程对象的纯滞后时间,T代表着过程对象的时间常数。
温度控制系统进行设计时,我们所采用的控制器为P(比例)控制器,PI(比例积分)控制器,PID(比例积分微分)控制器。
在调节这些控制器的参数时,人们所用的最常见的方法便是经验法(试凑法),这种方法可以避免使用一些非常复杂的公式,使人们对温度控制系统的设计节约了时间。Ziegler-Nichols(工程整定法-反应曲线法)是工业生产过程中最常用的控制方法。这种方法便是依靠一些公式和简单的经验来确定出比较准确的PID控制器的参数,所以Ziegler-Nichols方法也被称作经验公式,由于知道了温度控制系统的传递函数,因此所用到的方法是试凑法和Ziegler-Nichols方法的第二个调整法。Ziegler-Nichols的第二个调整法的经验公式如表3所示:

表3 Ziegler-Nichols的第二个调整法
表格中的a值,便可以通过直接观察该温度控制系统的特性曲线来得到。也可以通过另外一种计算方法得到,这种方法可以被称为三角比例计算法。三角比例法如图3所示:
结合图3,求a和L值的公式为:
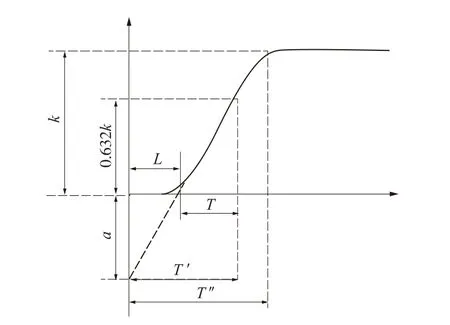
图3 三角比例法

通过Ziegler-Nichols(工程整定法-反应曲线法),我们便可以得到KP,TI和TD的值,再根据经验法,增大I(积分)控制器的参数值,达到我们所希望的预定值,再微调D(微分)控制器,直到系统达到所期望的效果。
4 温度控制系统的设计仿真
恒温箱[8]在我们日常生活中有着很普遍的使用。通过对恒温箱温度控制系统模型的设计,使用PC机操作系统为Windows10,CPU为Intel i5-10200H处理器,运行内存为16G。MATLAB[9]软件里面的关于Simulink[10]的模块化编程。
恒温箱[11]温度控制系统模型:

在Simulink中建立系统模型,再分别用P(比例)控制器,PI(比例积分)控制器,PID(比例积分微分)控制器加入该系统模型,从而做出对比,分析比较用三种控制器的优缺点。
用Simulink建立该温度控制系统模型,该系统模型如图4所示。

图4 恒温箱温控系统模型
通过该系统模型,进行系统分析仿真[12],该系统模型中滞后时间为30s,则应该在Transport Delay模块[13]中设置参数滞后时间为30s。为方便对比分析,系统输入模块给定值应设置为100,仿真结果如图5所示:
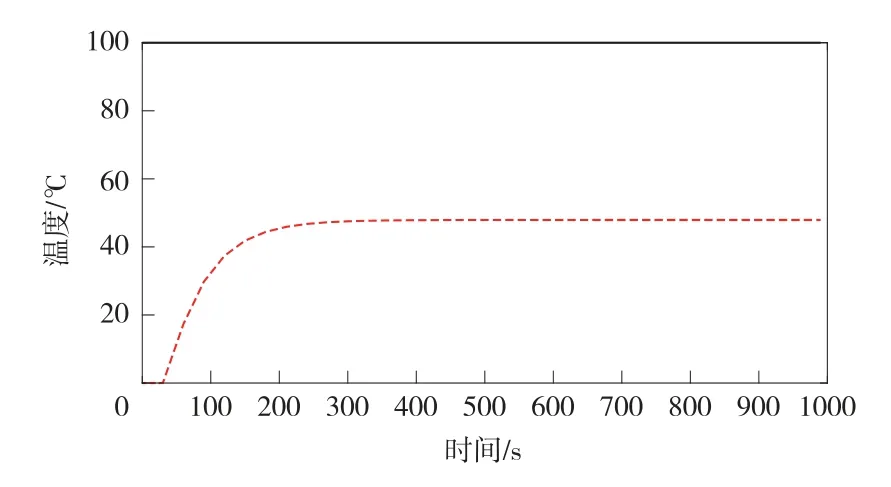
图5 恒温箱温控系统仿真结果
输入模块参数给定值为100时,观察系统的响应曲线可以看出,该系统的稳态误差居然超过了50%,说明该系统的精度很差,恒温箱温控系统系统也不好,必须加入控制器来调节该系统性能。根据这个设计出来的恒温箱是根本无法使用的,因此我们便对该系统进行改善。
在恒温箱温控系统中加入P(比例)控制器,对P控制器参数进行调节设定。系统滞后时间为30秒,系统输入参数给定值为100,在Simulink设计该系统模型如图6所示:
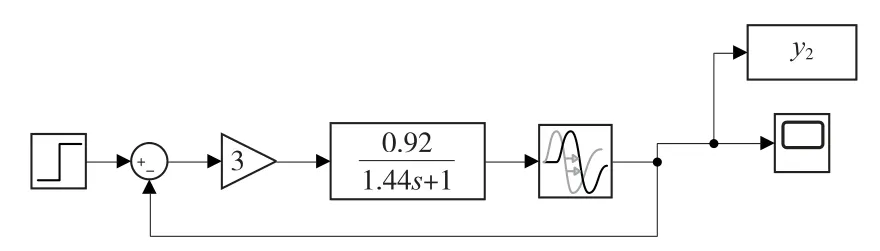
图6 基于P(比例)控制器恒温箱温控系统
该系统的输出响应曲线如图7所示:

图7 加入P控制器的温控系统输出响应
通过加入P(比例)控制器后,可以明显看到,系统的稳态误差变成了30%以内,说明了系统的精度得到了一定的改善。系统的上升时间也比原来缩短。系统的性能得到了一定的改善。
在恒温箱温控系统中加入PI(比例积分)控制器,所建立的系统模型如下图8所示:

图8 基于PI控制的温控系统
在该系统模型中设置参数,KP=3,KI=0.02,滞后时间为30秒,输入给定初始值为100,得到的系统响应曲线如图9所示:
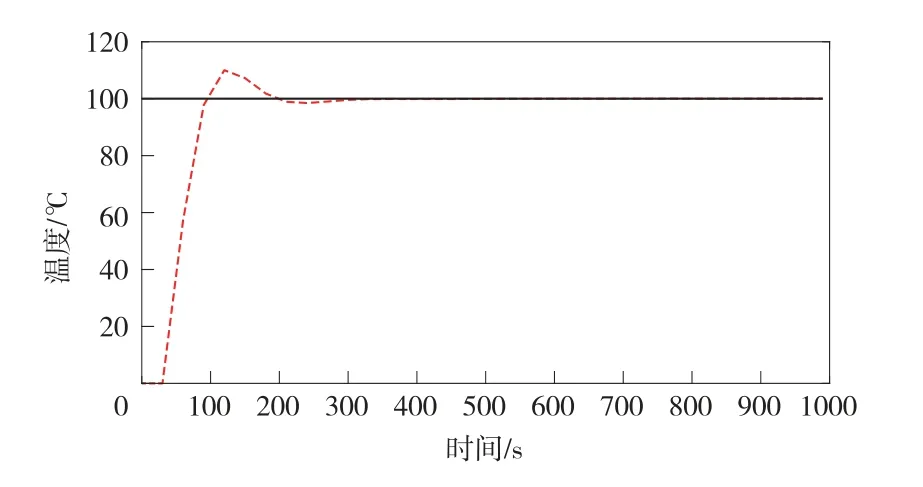
图9 基于PI控制的温控系统响应曲线
分析图5—9得出的响应曲线图,我们可以看到系统的稳态误差几乎是0,系统的精度较高。而且系统的调节时间大大的缩短,约为300秒,系统的超调量,该系统的性能指标较良好。系统的动态性能较之前得到了很大的改善。
使用PID控制器进行温度控制系统的设计,在Simulink中所建立的系统模型如图10所示:

图10 PID校正的温控系统
在温控系统中加入PID控制器,通过对PID参数值进行设定,KP=3,KI=0.02,KD=5,其他条件不变,可以得到该系统的响应曲线如图11所示:
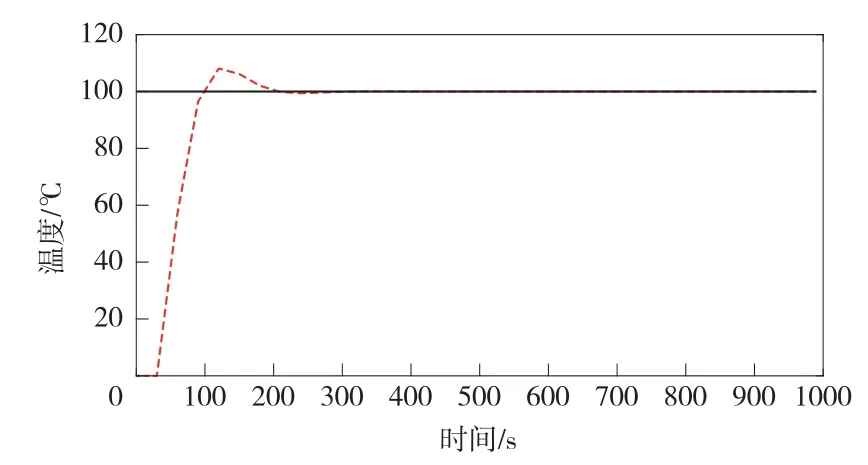
图11 基于PID的温控系统响应曲线
该系统中加入PID控制器后,从图中可以看出,系统的调节时间较之前变小,约为200秒,系统的稳态误差为0,超调量为10%。该系统的性能指标都良好,系统的精度也高,因此,此时系统的动态性能较之前有了很大的改善。使用PID控制器的效果要优于使用P控制器和PI控制器。
使用PID控制器,当受到外界信号干扰时,更能看出系统性能的优越性,因此,我们在上述模拟系统中加入一个在400秒到430秒之间+50的干扰信号。此时系统模型如下图12所示:
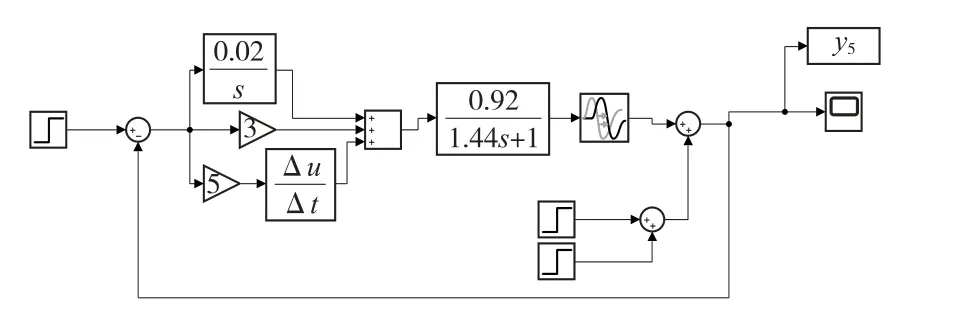
图12 受干扰的系统模型
该模拟系统的仿真结果如图13所示:
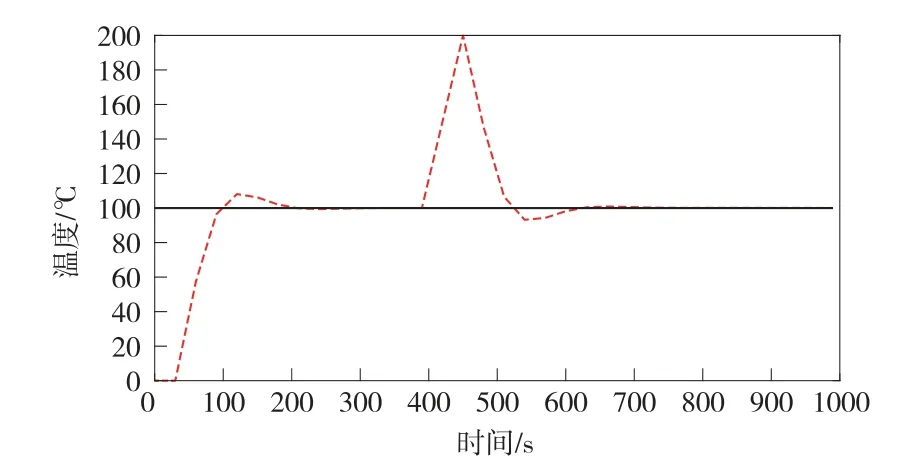
图13 系统响应仿真曲线
从图13可以看出,就算系统加入干扰信号,该系统也能较好地抑制这种干扰,具有比较良好的抗干扰能力,并且很快系统再次趋于稳定状态。因此,更加证明了使用PID控制器的优越性。
5 结语
在系统设计过程中,分别在温度系统中加入P控制器,PI控制器,PID控制器,通过各自的输出响应可以看出,基于P的温度控制系统产生了一定的超调量,系统的稳态误差也减小。基于PI的温度控制系统的稳态误差为0,所用调节时间缩短,约300s。超调量为10%,系统的性能得到了很大的改善。基于PID的温度控制系统的稳态误差为0,系统的调节时间比PI控制时更短,约200秒,此时系统的动态特性最好。从输出响应看出,系统收到干扰信号的影响后能很快恢复到稳定状态,说明PID控制的温控系统具有较强的抗干扰能力。
