一种基于多操纵面控制分配的IDLC人工着舰精确控制方法
2021-10-21张志冰张秀林王家兴史静平
张志冰,张秀林,*,王家兴,史静平
1. 航空工业沈阳飞机设计研究所,沈阳 110035
2. 西北工业大学 自动化学院,西安 710089
舰载机是一种以航母为军事基地的特殊飞行器,舰载机不但能够执行对海、陆、空目标攻击,还能完成预警、侦查、电子对抗等诸多作战任务。舰载机在赋予航母强大作战能力的同时,也存在着安全起飞和降落等重大技术难题,特别是在着舰(降落)过程中,受舰尾流扰动、航母甲板运动、人机耦合、光电系统时间延迟等多种不利因素的影响,危险性最强,事故率最高。着舰过程看上去酷炫无比,实则非常艰难且惊心动魄,因而舰载机着舰控制技术[1-3]成为各国航空母舰/舰载机系统发展的一项关键和重要技术。
舰载机在着舰时,一般工作在低动压大迎角阶段[4],美军F-14、F-18等舰载机着舰主要采用Backside操纵方式[5-7],即:使用纵杆控制飞机迎角,油门杆控制下滑;而侧杆控制滚转角,方向舵用于协调荷兰滚运动。这种传统的着舰控制方式存在着操纵通道功能耦合、着舰精度不高等多种不利。例如:当飞机存在下滑道负向偏差时,飞行员推油门杆以增加升力、消除下滑道偏差,与此同时升力增加使速度轴向上偏转,因而迎角减小;为稳定迎角并保持迎角升力,飞行员同时需要拉杆使机体轴向上偏转,这使得俯仰角也相应增加,因而飞机的油门杆和纵杆通道之间存在着较为复杂的功能耦合关系。这种耦合极大的增加了飞行着舰操纵的身心负担,特别是在舰尾流扰动作用下,飞行员通常在一次着舰的最后18 s内,需要对飞行姿态进行200~300次调整[5]。
为了提高着舰精度和可靠性,并降低飞行员的身心负担与培养成本,美国从2014年开始开展舰载机精密进近与着舰增强引导综合控制技术的研究,简称魔毯技术[8-10](Maritime Augmented Guidance with Integrated Controls for Carrier Approach and Recovery Precision Enabling Technologies,MAGIC CARPET)。2016年6月,在“乔治·华盛顿”号航母上对“魔毯”系统进行的598次测试中,只有一次脱钩情况发生,飞行员们对“魔毯”颇为满意,它使得驾驶员在着舰前的操作由原来的几百次减少至10~20次。
魔毯系统有2种工作模式:航迹角速率模式(Flight Path Angle Hold,FPAH)和增量航迹(Delta Path,DP)模式。这2种工作模式之所以能够大幅降低着舰操纵次数的关键在于采用了综合直接力控制(Integrated Direct Lift Control,IDLC)技术。相比于常规力矩式飞行控制系统通过操纵面改变力矩,间接地对航迹进行调整[6],直接力控制[7-8]通常采用升降舵与襟翼构成一对可平衡俯仰力矩的控制面,直接对作用于飞机的力进行控制,因此可以消除力和力矩的耦合。这样做的优点在于消除了轨迹运动(速度、航迹角)和姿态运动(迎角、俯仰角速率)的耦合,减小了从操纵到轨迹改变的时间滞后,这对于要求轨迹控制“快、稳、准”的着舰控制十分有利。
中国某舰载机气动设计采用三翼面布局方式(如图1所示),除后缘襟翼和升降舵外,前缘机动襟翼、鸭翼也具备一定的大迎角增升能力,特别是鸭翼采用全动式设计,着舰时鸭翼后缘下偏可达20°左右,能够产生强劲的脱体涡,主翼因此可以获得额外的升力补充。除此之外,鸭翼正偏同时会产生抬头力矩,能够抵消后缘襟翼下偏所产生的低头力矩,降低对升降舵的配平要求,并在一定程度上减小升降舵上偏所带来的升力损失。先进的三翼面气动布局在给直接力控制带来诸多潜力和优势之外,也存在一些需要技术上需要解决的难题,比如:① 后缘襟翼、平尾、鸭翼、前缘襟翼均具有增升能力,而平尾和鸭翼也都具有俯仰配平能力,如何根据直接力控制和力矩平衡的要求完成对操纵面的分配与控制是IDLC技术实施需要解决的重要问题;② 某舰载机外侧襟副翼设计面积较大,具备相当的增升能力,在功能划分上不仅要用于增升控制,还要参与滚转控制,如何实现对襟副翼的协调控制是控制通道解耦的关键。这些问题都是IDLC技术实施必须要解决的问题。

图1 舰载机航模Fig.1 Carrier-based aircraft model
基于以上分析,本文拟开展基于多操纵面控制分配的IDLC人工着舰精确控制方法研究,主要目标有3个:① 对MAGIC CARPET系统着舰过程的控制特点进行分析,基于此提出一种解耦设计的IDLC控制律结构;② 基于三翼面布局飞机的特点,提出基于多操纵面控制分配的IDLC控制方法;③ 通过数字仿真验证基于多操纵控制分配的直接力控制方法的有效性,并对比分析该方法相对于常规控制着舰的优点。
1 MAGIC CARPET系统功能分析
1.1 MAGIC CARPET系统着舰过程
MAGIC CARPET系统是美国海军开发的一套舰载机机载辅助着舰系统,它主要涉及着舰平视指引显示(Head-up Display,HUD)、综合直接力控制、飞行轨迹角速率控制、飞行轨迹增量控制、迎角恒定的动力补偿控制等几项关键技术。该系统就像是为舰载机飞行员配备的“专职副驾驶”,可以利用一系列飞行控制算法,对飞机的高度、速度、风速、进场的角度等因素进行计算,综合判断出最合适的条件,并导引飞行员执行它所建议的降落程序。如图2所示,基于MAGICCARPET的舰载机着舰系统工作过程[5,11]可描述如下:

图2 基于魔毯技术着舰的基本结构Fig.2 Basic structure of landing based on MAGIC CARPET technology
1) 当舰载机处于航母后方接收到交通管制中心的着舰许可之后,舰载机首先按照规定完成等待航线,然后直线进入等待区的马歇尔点,向航母靠近,如图3所示。整个过程中飞行员需要不断调整飞机的姿态和高度,在此阶段舰载机处于常规力矩式控制方式。

图3 舰尾等待航线与进场航线Fig.3 Stern holding route and approach route
2) 当飞机距离航母约10海里(1海里=1 852 m), 高度位于400 m左右,舰载机转为着舰构型,飞行员放下襟翼、尾钩和起落架,接通IDLC控制模式。IDLC包含FPAH和DP 2种工作模态[8-9],当杆位移处于±1~±2 inches(1 inches=2.54 cm)之间时,控制系统处于FPAH工作模态,此时飞行员根据菲涅尔透镜光学着舰系统(Imprived Fresnel Lens Optical Landing System,IFLOLS)引导、惯导系统计算出来的航迹角,来进行航迹角速率的控制[8-9];当杆回中时飞机的航迹角速率为0,航迹角保持不变。若杆位移大于±2 inches,意味着飞行员需要对飞机进行较为紧急的操纵,控制系统将自动切出IDLC模式,转为常规力矩式控制模式。
FPAH模态工作时,飞机的俯仰角和航迹角会以相同的速率进行改变,能够让迎角始终保持在基准配平值,而迎角保持有利于对下滑道的快速修正。
3) 当飞机在距离航母约6海里处,飞行员进行着舰检查,在距离航母约3海里处捕捉到下滑窗口,直接进行下滑着舰,此时IDLC控制处于DP模态,杆位移处于±1 inches之内。
DP模态仅在着舰的下滑阶段接通,该模态根据飞机当前速度、迎角、下滑引导参考路径和航母运动速度,自动计算出驾驶杆处于中立位置时的参考航迹角(通常处于3.5°~4°,风很大时为4°),而杆位移与飞机航迹角相对于参考航迹角的偏差相对应。当IFLOLS的“肉球”偏离基准光心时,表明飞机偏离基准下滑道,飞行员根据“肉球”偏离基准光心的大小和极性,完成下滑轨迹的修正,如图4所示。
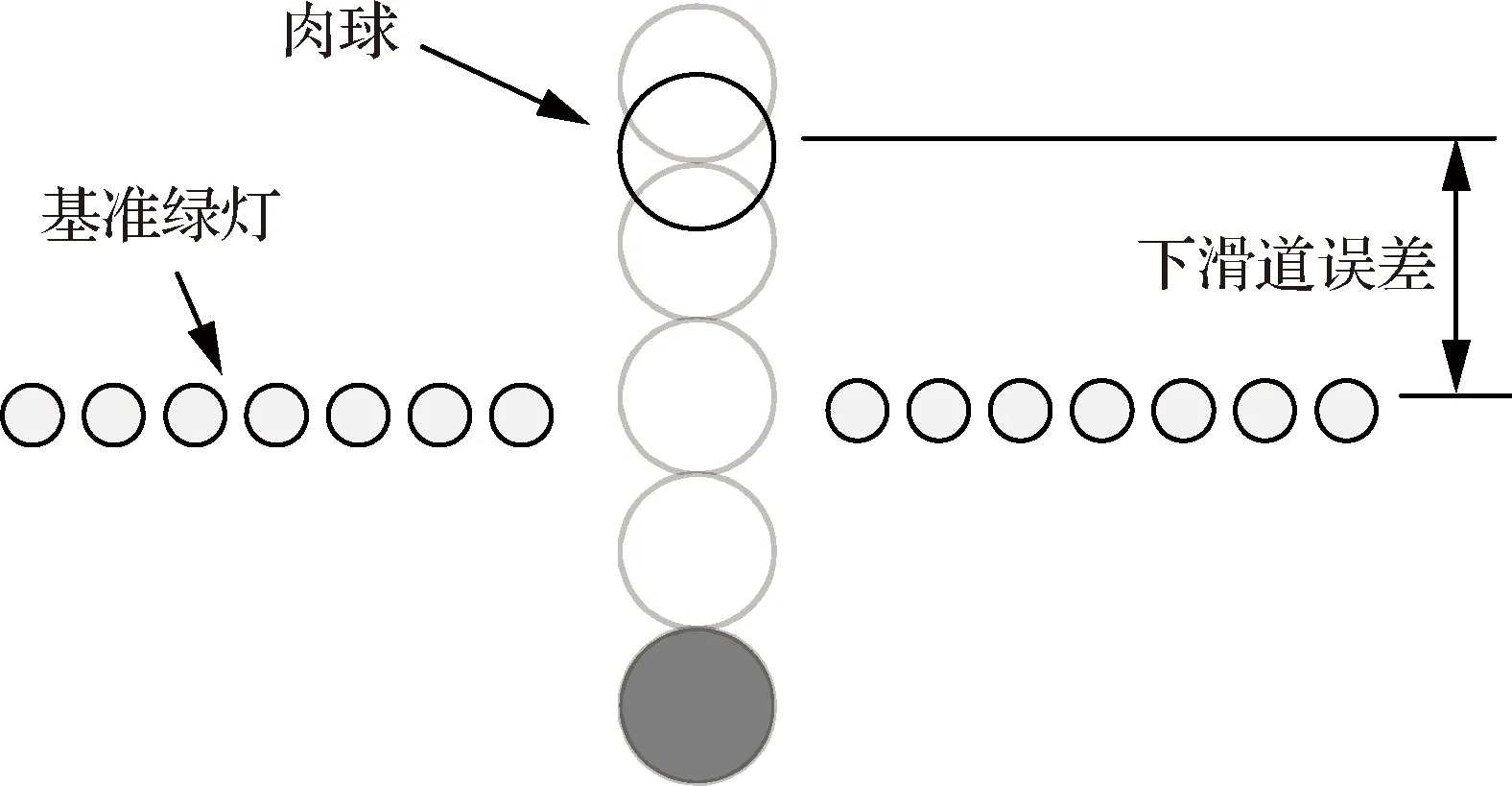
图4 IFLOLS“肉球偏差”Fig.4 IFLOLS “Meatball Deviation”
1.2 MAGIC CARPET系统着舰过程分析三翼面气动布局飞机IDLC技术实施分析
分析IDLC对于飞机纵向控制的特点不难发现:IDLC对于着舰下滑迎角的保持、力矩平衡的控制是由IDLC控制律自动完成的,而油门杆也可以处于自动控制状态。MAGIC CARPET虽然是一种人工着舰控制系统,但它在底层呈现出了隐藏式的自动控制策略,具备高度的辅助驾驶功能,因而能极大地降低了飞行员的负担。从这一角度来看,MAGIC CARPET可以视为是一种半自动的着舰控制技术,IDLC是这种着舰控制技术的核心。IDLC系统设计涉及舰尾流建模与抑制[12-15]、直接力控制[16-20]、甲板运动预测与动力补偿[21-23]、参考航迹角计算等环节,其中直接力控制是FPAH模态和DP模态控制律设计的基础,是舰尾流抑制的关键,受篇幅限制本文主要对基于多操纵面控制分配的直接力控制技术进行介绍。
直接力是指直接产生按照愿望改变轨迹的力,不同于常规的力矩控制方法,直接力控制方案直接地对作用于飞机的力产生影响,因此可以消除力和力矩的耦合,从而消除轨迹运动和姿态运动的耦合,达到减小滞后时间的目的。因此解耦控制方法是实现直接力控制的关键。为了在工程上实现基于直接力的精密航迹控制,应具备如下2方面的要求:
1) 飞机应具备一对或多个满足直接力控制的操纵面,以配平力矩并产生净升力,从而实现对飞机纵向的直接力控制。
2) 在理论方法上应找到一种能够便于工程应用,并能够实现解耦控制的方法,以实现飞机姿态与航迹的解耦,从而消除轨迹运动和姿态运动耦合。
根据上述分析,本文对相关工程对象进行了分析,采用如下技术途径实现上述设计要求:
1) 操纵面功能分配:通过鸭翼、前缘襟翼、后缘襟翼、襟副翼、与平尾构成一组能够实现飞机纵向直接力控制的控制面。实施时,前缘襟翼、后缘襟翼、襟副翼联动下偏,改变整个机翼的弯度,从而产生主要的升力贡献。考虑到该工程对象采用全动式鸭翼设计,鸭翼后缘下偏可达20°左右,产生的脱体涡能够增加主翼的升力,因此当切入着舰构型时,根据载荷情况使鸭翼与上述操纵面联动下偏至预偏角,以增加升力。而平尾向上偏转产生抬头力矩来抵消上述操纵面偏转产生的低头力矩。
特别需要指出的是:鸭翼正偏的同时会产生抬头力矩,因而也能够抵消升力增加所产生的部分低头力矩,降低对升降舵的配平能力要求,并在一定程度上减小升降舵上偏所带来的升力损失。该组合方式可以在现有飞机上进行改装升级,即有针对性的对这些控制面的气动特性进行深入研究,设计直接升力控制方法并借助于飞行控制计算机(FCC)对直接升力进行辅助控制。
2) 解耦方法选择:特征结构配置(Eigen-structure Assignment,EA)与动态逆方法是2种典型的可用于解耦设计的控制方法[19],二者都具有较好的解耦控制能力。考虑到非线性时变的动态逆控制律结构在工程化实施时不易与现有飞控系统相结合,本文采用特征结构配置方法进行解耦设计。特征结构配置方法通过特征向量与极点配置来实现对飞机纵向运动短周期模态(迎角、俯仰角速率)与长周期模态(航迹角、速度)的解耦,非常便于直接力控制的实现;并且这一方法在控制律形式上呈现出比例控制的特点,也特别容易工程化应用。
2 基于EA的直接力解耦设计
本文提出的基于多操纵面控制分配的IDLC控制系统结构如图5所示,除典型IDLC着舰系统所包含的FPAH控制、DP控制、迎角稳定与力矩平衡控制、基于迎角恒定的动力补偿控制等功能模块外,在系统内环还设计了一种具有解耦功能的EA调节器。其目的是通过内环EA调节器设计将飞机的自然特性调整为满足一级品质、且长周期变量与短周期变量解耦的特性。

图5 IDLC控制系统结构示意图Fig.5 Structure diagram of IDLC control system
对于飞机纵向运动,在给定任意初始状态和输入时,描述飞机纵向运动变量V(t)、α(t)、q(t)、θ(t)的响应均可以写成模态的线性组合的形式:
x(t)=C1e-σ1tsin(ω1t+α1)+
C2eσ2tsin(ω2t+α2)+M
式中:e-σ1tsin(ω1t+α1)和eσ2tsin(ω2t+α2)分别表示纵向运动长周期模态和短周期模态;系数C1、C2反映了长、短周期模态对该变量影响大小。如果能够通过EA设计实现长、短周期模态解耦,即意味着在短周期变量α(t)、q(t)响应表达式中的系数C1极小,因而长周期变量V(t)受到舰尾流扰动或油门杆输入作用,对短周期变量α(t)、q(t)的影响较小。反之,短周期变量受到扰动或输入作用,对长周期变量的影响也很小。
舰载机下滑着舰时,IDLC系统工作要求迎角能够稳定保持在预设参考值(8.1°~9.1°),而速度也处于恒定控制状态。因而EA调节器的这种解耦控制能力十分有助于油门通道与纵杆通道的解耦设计。此外,不论是FPAH模态,还是DP模态,当杆回中时,EA调节器仍具有抑制舰尾流扰动、稳定飞机下滑状态的特性。基于上述原因,本文采用EA调节器进行飞机自然特性的调整。
下面对EA调节器的解耦控制、基于多操纵面控制分配的直接力控制技术进行介绍。
2.1 EA调节器设计
特征结构是系统的特征值、特征向量的统称,通过特征结构配置,可以使系统达到预定的性能要求,并实现模态之间的解耦[24-25]。
设线性时不变系统的状态方程为
(1)
式中:rank(B)=m,rank(C)=r,x∈Rn,u∈Rm
Moore的研究表明[3]:若系统可控,且所配置的特征向量满足下列条件时:

3)vi∈span{Nλi}.
可求得反馈增益矩阵K。
2.2 求解反馈增益矩阵
假设反馈形式为
u=Ky
(2)
则闭环系统为

(3)

则原系统可变换为

(4)

线性变换前后,系统的特征值不变,特征值λi的特征向量变为
(5)
根据特征根与特征向量的关系有
(6)
即为
(7)

(8)

相应地,I与A也可分块如下:
(9)
根据分块矩阵运算规则,从式(9)中取第一行等式可得
(10)
即为
(11)

式(11)等效变换为
同理,对于其他期望特征值λ1,λ2,…,λr及对应的可达特征向量有
⋮
总的表达式可写为
(12)

由式(12)可得反馈增益矩阵为
(13)
2.3 特征向量的可配置性


图6 可达特征向量的几何解释示意图Fig.6 Geometric interpretation of reachable
(14)
由于可达到的特征向量必须属于所需子空间,因此
(15)
(16)
根据标量函数对向量与矩阵的微分运算,可得
(17)
若∂J/∂zi=0,则有

(18)
(19)
2.4 飞机纵向运动模态解耦设计
系统的特征值决定了系统的稳定性与响应速度;系统的特征向量决定了该系统的各个模态之间的耦合关系及耦合程度。因此预置合适的闭环特征向量是实现解耦的关键。对于已选择好的特征值,只要使特征向量中需要解耦的模态所对应的元素为零,就可以得到满足解耦要求的设计结果。对于飞机纵向运动,为使短周期模态和长周期模态间实现解耦,以达到短周期模态不影响前飞速度,长周期模态不影响迎角,特征向量可按如下方式配置:

其中:×表示该处可取任意值,但该向量不一定可达。
依照式(13)计算输出反馈矩阵K,特征结构配置只可精确配置r个特征值及其对应的特征向量,其中每一特征向量中至多可以有m个指定元素。若要提高特征向量的可配置性,需增加B阵的秩,此时需增加控制变量个数。若想对m以上元素进行精确配置,需增加输入控制量的维数。
本文基于V(t)、α(t)、q(t)、θ(t)状态反馈进行特征结构配置,因此r=rank(C)=4,可对纵向4个特征值进行配置,采用平尾和襟翼2个控制面作为控制量,因此m=rank(B)=2,可将每个特征向量的2个元素指定为0进行解耦设计,求解的反馈矩阵KEA∈R2×4。
3 基于三翼面飞机的多操纵面直接力控制分配设计
舰载机着舰时,后缘襟翼等操纵面下偏,舰载机转为着舰构型。对于三翼面布局飞机而言,为增加着舰升力,鸭翼、前缘襟翼、襟副翼也将与后缘襟翼一起联动下偏,因此IDLC控制分配模块解算的输出是各个操纵面相对于下滑配置值的增量值,如图5所示。设鸭翼、前缘襟翼、后缘襟翼、襟副翼的下滑着舰配置值以及平尾配平值分别用δc0、δLEF0、δf0、δea0、δe0表示,相应的各个操纵面控制分配模块输出的增量值用Δδc、ΔδLEF、Δδf、Δδea、Δδe表示,则各个舵面执行器总的输入可表示为
(20)

(21)
控制分配方法采用模块化的设计思想进行操纵面的控制分配设计,如图7所示,在以该结构进行控制系统设计时,控制律的输出表征了飞机运动对于期望直接力或力矩的需求,而分配律则根据操纵面偏转量与期望直接力或力矩的关系求解出各个操纵面的偏转角指令。虽然采用特征结构配置方法可以实现基于平尾和襟翼的解耦控制,但对于需要利用前缘襟翼、鸭翼进行复杂协调的着舰控制,控制分配结构更有利于对于操纵面控制方式和组合方式的调节。采用控制分配构型的优点在于:不需要考虑控制律设计的问题,只需要关注如何将控制律所要求的虚拟控制量最优地分配给控制面,这一做法简化了控制律的设计,在操纵面出现故障或损伤时, 易于重新进行控制作用的划分, 提高了系统的可靠性。
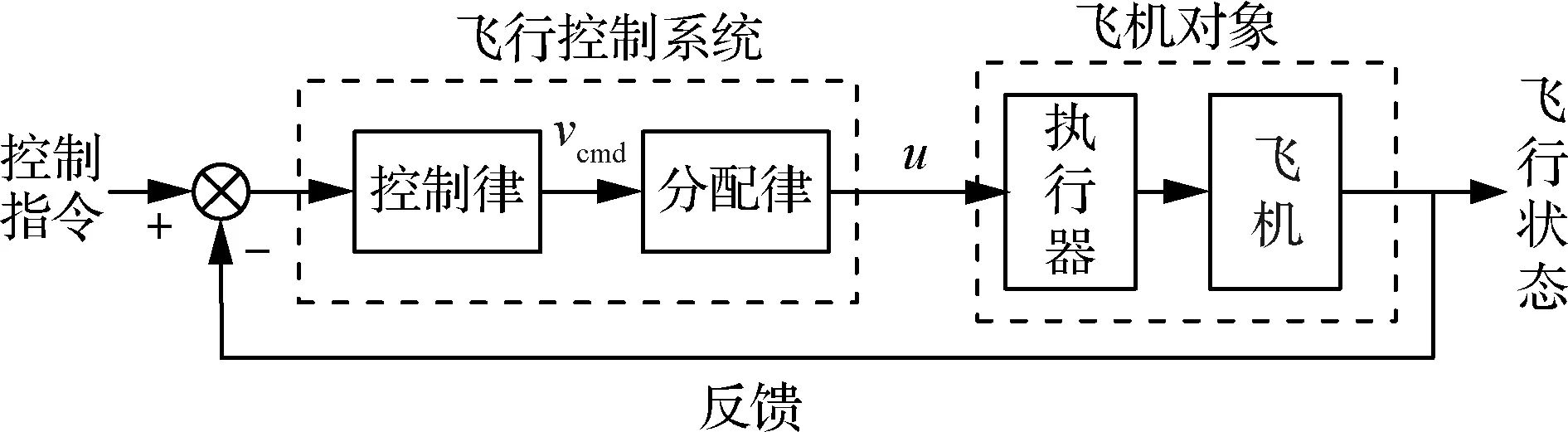
图7 模块化飞行控制系统框图Fig.7 Block diagram of modular flight control system
对于图5所示的IDLC系统结构,控制分配模块的输入由FPAH控制律、DP控制律、迎角稳定与力矩平衡控制律的输出确定。FPAH控制律和DP控制律,其输出反映的均是修正下滑道偏差所需要的直接升力增量,可用ΔvL表示。简单起见,采用PID方法设计FPAH控制律和DP控制律,对着舰控制分配问题进行描述。
1) FPAH模态控制律
(22)
2) DP控制律
(23)
3) 迎角稳定保持控制律
Kqq-KvLΔvL
(24)
总体来说,迎角稳定保持控制律反映了下滑着舰对俯仰操纵力矩的需求,可用Δvm表示。
除上述因素外,控制分配设计还需要考虑襟副翼功能复用的问题,滚转通道的控制也需要有襟副翼,设下滑着舰对滚转操纵力矩的需求用Δvl表示。
综上所述,舰载机下滑着舰纵向控制需重点考虑对直接升力、俯仰操纵力矩、滚转操纵力矩的需求。令虚拟控制量v等于
v=[ΔvL,Δvm,Δvl]T
则下滑着舰直接力控制分配问题可描述为:已知v(t)∈R3,及映射Be:Rm→R3(m≥3),求解不定方程:
Beu(t)=v(t)
(25)
使控制变量Δu(t)在不超出控制约束的前提下满足下滑着舰的性能指标。
对于本文所研究的三翼面布局飞机,控制变量Δu(t)表达式为
相应地,控制效能矩阵描述为
(26)

至此,便完成了三翼面飞机多操纵面直接力控制分配的建模。现有控制分配问题求解方法如:直接分配法、伪逆法、面搜索法、线性规划等方法均可用于直接力着舰控制分配问题的求解。其中,伪逆法工程实施简单易行,简便起见下文采用伪逆法进行分配求解示例。当采用伪逆法进行分配求解时,操纵面输出为
(27)
4 仿真分析
根据本文提出的基于多操纵面控制分配IDLC舰载机人工精确控制方法,搭建某三翼面布局飞机非线性六自由度仿真模型,完成方法的有效性验证。
4.1 基于EA的解耦控制
选择高度H=300 m、V=70 m/s、后缘襟翼δf=20°作为基准状态对飞机进行配平,依据式(21)选择平尾和襟翼作为控制变量,线性化得到飞机纵向运动小扰动方程为


求得其短周期、长周期的特征根分别为
相应的特征向量为

分别给定Δα=5°,Δθ=5°的初始扰动,系统分别在短周期变量扰动和长周期变量扰动作用下的状态响应曲线如图8所示。从响应结果看,飞机纵向自然特性呈现出长短周期模态强耦合的特征,任一变量受到初始扰动,都会使其他变量受到较强扰动。

图8 短周期和长周期干扰对系统状态的影响Fig.8 Influence of short period and long period interference on system state
选取期望的特征根为
选取期望的特征向量为
采用式(13)求得反馈增益矩阵为
KEA=

同样给予反馈系统Δα=5°、Δθ=5°的初始扰动,系统在短周期变量扰动、长周期变量扰动作用下的状态响应曲线如图9所示,舵面变化曲线如图10所示。由图9(a)可知:迎角受到5°扰动后,俯仰角的变化量|Δθ|max≤0.08°,速度的变化量|Δv|max≤0.03 m/s;由图9(b)可知:俯仰角受到5°扰动后,迎角的变化量|α|max≤0.2°,q快速收敛。这表明:EA方法不仅实现了长短周期的模态解耦,还改善了系统的稳态性能。

图9 解耦后迎角和俯仰角扰动对系统状态的影响Fig.9 Influence of angle of attack and pitch angle disturbance on system state after decoupling
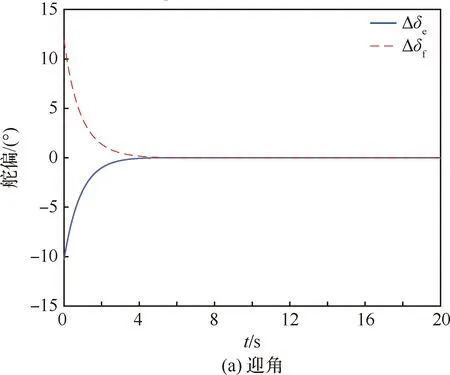
图10 解耦后俯仰角和迎角扰动下的舵面变化曲线Fig.10 Control surface change curves under pitch angle and angle of attack disturbance after decoupling
本文设计的EA调节器的目的是为了实现长短周期解耦,航迹与姿态的解耦,传统的SAS增稳系统反馈迎角和俯仰角速率的主要目的是进行增稳控制。图11给出带有“EA调节器解耦控制”模块与带有“传统的SAS增稳系统”分别在5°航迹角扰动下的迎角α和俯仰角速率q的变化曲线。通过EA调节器解耦后的系统迎角的变化量|α|max≤0.2°,q快速收敛,而传统SAS增稳系统呈现震荡状态。这表明:EA方法较传统SAS增稳系统实现了长短周期的模态解耦,系统的稳态性能也更好。

图11 5°航迹角扰动下的迎角和俯仰角速率变化曲线Fig.11 Angle of attack and pitch angle rate curves under track angle 5° disturbance
4.2 基于多操纵面控制分配的直接力着舰
以4.1节设计的EA调节器作为内环,基于式(22)~式(24)进行FPAH控制律、DP控制律、迎角稳定保持控制律的参数整定。飞机在H=300 m、V=70 m/s状态下直接力控制分配的效能矩阵Be为
(28)
各操纵面的位置限制如表1所示

表1 操纵面位置限制
在着舰构型下,鸭翼、前缘襟翼、后缘襟翼、襟副翼下偏有利于增加飞机的升力,参照美国F-18舰载机着舰时根据载荷配置情况分上、中、下3个区间联动预偏襟翼和副翼的做法,本文将上述操纵面配置在表2所示位置。

表2 操纵面预偏设置
(29)
根据表2计算并设计各个操纵面相对于预偏基准Δδ的控制约束如表3所示。
基于表2和表3分析结果进行下滑配平,采用直接分配法对式(25)进行分配求解,并完成式(22)~式(24)控制律参数的整定。对FPAH模态和DP模态进行仿真分析

表3 操纵面控制约束
1) FPAH模态仿真结果
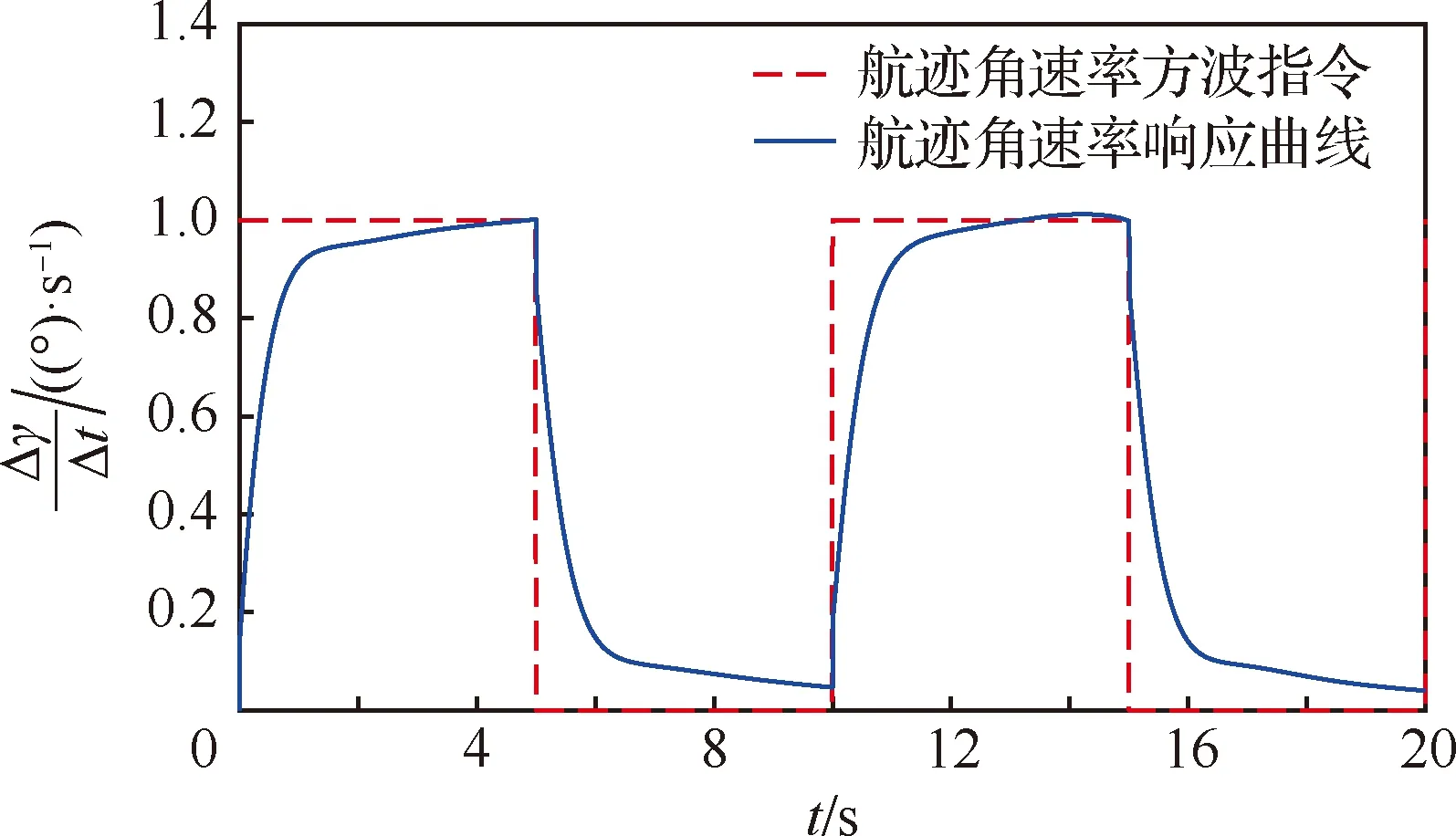
图12 FPAH模态航迹角速率响应曲线Fig.12 Response curves of FPAH mode track angular rate
2) DP模态仿真结果
采用DP控制模态进行着舰下滑仿真,响应曲线如图13所示。仿真分析:在50 s时接入λc=-3.5°航迹角下滑指令,飞机快速由平飞段过渡到下滑段,航迹角动态响应快速性较好,且迎角偏离下滑参考值最大不超过0.15°,这说明长短周期模态解耦性能较好,下滑迎角保持控制律展现出了良好的性能。整个下滑段飞机速度始终保持在配平值70 m/s,基于迎角恒定的动力补偿油门控制效果良好。由于采用了多操纵面控制分配技术,极大地利用了诸多操纵面的增升效果,下滑迎角参考值减小至αref=4.3°,也呈现出了稳定的下滑控制。操纵面响应方面:升降舵负责迎角保持和俯仰力矩平衡,变化平稳最大出舵量为2.5°;襟翼负责航迹跟踪,当航迹减小时,襟翼上偏减小升力,使航迹角快速跟踪到期望值,速度轴和机体轴同时变化从而使飞行迎角保持不变,航迹角变化量等于俯仰角变化量,展现出了直接升力控制良好的性能,全程襟翼出舵量最大不超过6°。

图13 DP模态下滑着舰状态和舵面响应曲线Fig.13 Response curves of state and rudder in DP mode glide down and landing
直接力控制不同于常规方法以俯仰姿态控制轨迹,它能够消除轨迹运动和姿态运动的耦合,直接地对作用于飞机的力产生影响,因此当舰载机航迹在受到舰尾流扰动影响时,直接力控制可以快速地对航迹角偏差进行动态调节,具有动态快、滞后时间短的优点。综上,基于特征结构配置的直接力控制效果良好,达到了预期设计要求。
4.3 舰尾流扰动抑制
为了验证该方法对于舰尾流的抑制作用,建立低空自由大气紊流、雄鸡尾流、航母纵摇诱导尾流和随机尾流数学模型,设置甲板风速为18 m/s, 舰载机飞行速度为70 m/s,航空母舰纵摇幅度为1°,频率为0.6 rad/s,初始随机相位45°。舰尾气流综合后,各分量仿真结果如图14所示。
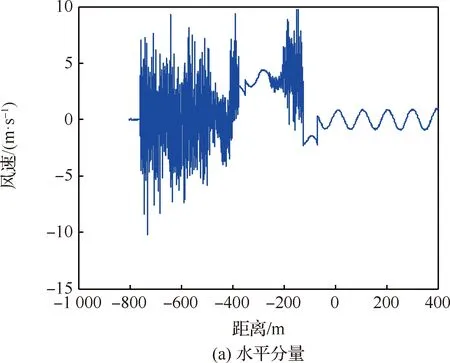
图14 舰尾流各分量Fig.14 Each component of ship wake
控制舰载机处于DP模式,给予λc=-3.5°的持续航迹角参考指令,并加入舰尾流扰动,飞机的航迹角、迎角和俯仰角速率响应曲线如图15 所示,副翼、升降舵、襟翼偏度的变化曲线如图16和图17所示。从仿真结果看,采用EA解耦设计多操纵面控制分配IDLC着舰控制方案相对于常规PID控制呈现出了更强的舰尾流抑制能力,着舰航迹角虽然出现了小幅振荡,但远优于常规力矩式控制。

图15 舰尾流扰动下的状态响应曲线Fig.15 State response curves of ship wake disturbance

图16 舰尾流扰动下常规PID控制舵面偏度Fig.16 Conventional PID control of rudder deflection under wake disturbance
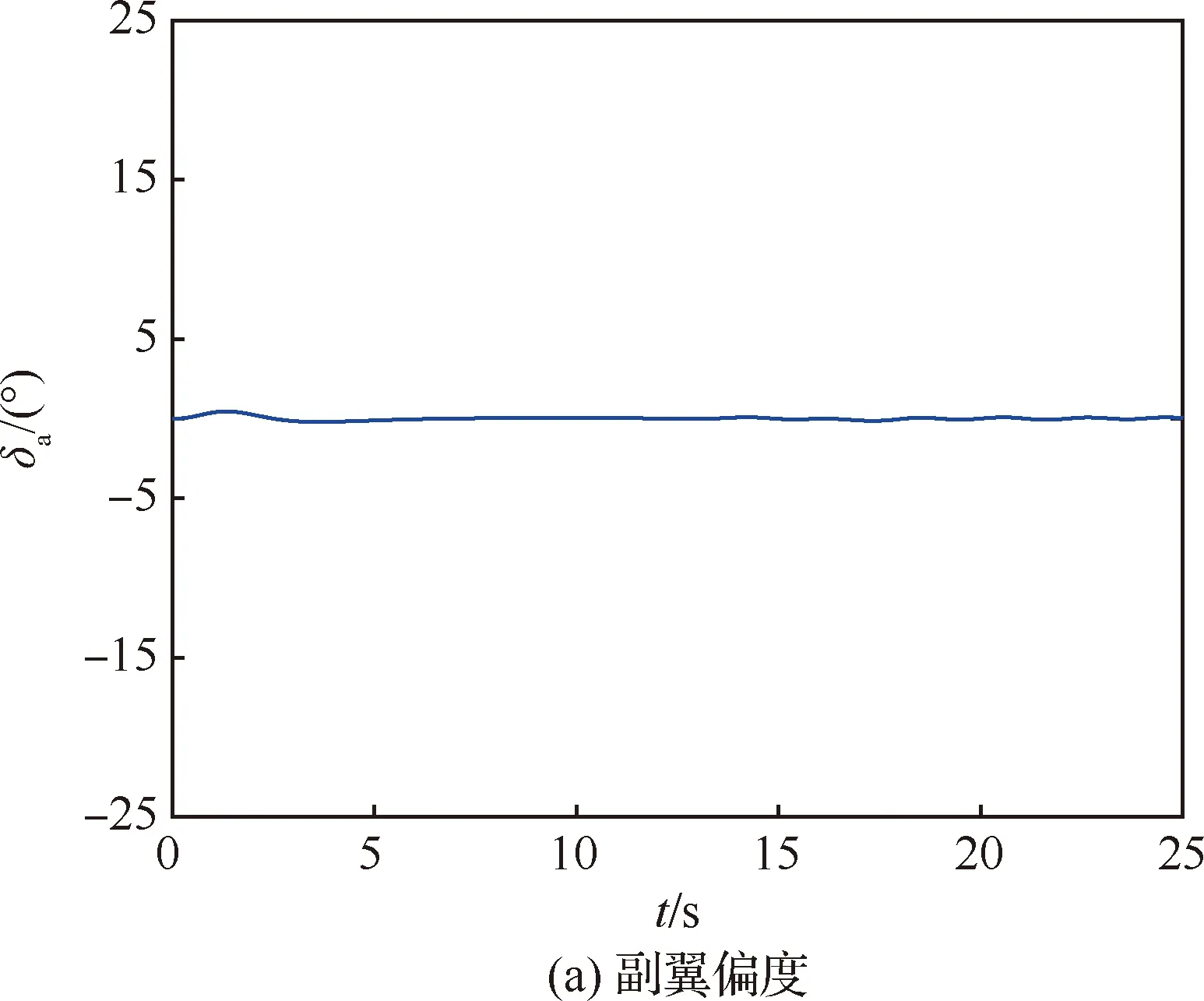
图17 舰尾流扰动下直接力控制舵面偏度Fig.17 Direct force control of rudder deflection under wake disturbance
5 结 论
1) EA调节器能够实现飞机纵向运动长短周期模态的解耦,在飞机长周期变量受到扰动或输入作用时,对短周期变量的影响很小。EA解耦控制的这种特点十分有助于油门通道与纵杆通道的解耦设计,当纵杆回中时,还具有抑制舰尾流扰动、稳定飞机下滑状态的能力。
2) 基于多操纵面控制分配的IDLC方法能够充分发挥三翼面飞机操纵面的气动优势,特别是利用鸭翼正偏增升,不但可以增升,还可以降低对升降舵的配平能力要求,并在一定程度上减小升降舵上偏所带来的升力损失。
