电动汽车车载移相全桥变换器改进研究
2021-10-13金宁治俄立明马腾刘金凤孙东阳
金宁治, 俄立明, 马腾, 刘金凤, 孙东阳
(哈尔滨理工大学 汽车电子驱动控制与系统集成教育部工程研究中心,哈尔滨 150080)
0 引 言
随着传统汽车导致的环境污染和温室效应等问题的日益严重,电动汽车凭借绿色、无污染、不产生温室气体等优点,收到了业界的广泛关注[1]。
电动汽车行驶时输入电压波动范围较大,其电压变化幅度一般在350~700 V,电池在为驱动电机提供动力的同时也要为DC-DC变换器提供能量。电动汽车狭小的空间导致其动力电池配置容量有限,为提高能源的利用效率选择损耗较小的DC-DC变换器,具有良好的理论意义和实用价值。DC-DC变换器按照输入输出是否具有电气隔离功能[2],分为非隔离型和隔离型。而目前针对隔离型的DC-DC变换器研究较多,主要分为正激、推挽、半桥和全桥变换器。正激型变换器结构简单,易于多路输出,但变压器单相励磁,利用率低。推挽型变换器的变压器磁芯利用率高,输出功率较大,输出纹波电压较小,但对开关管的耐压要求较高。半桥型变换器的输出功率大,效率高,但电源利用率较低。全桥变换器双向磁化,磁性利用率较高,损耗较小,其缺点是器件承受的压力较高[3]。
传统的移相全桥拓扑结构主要采用软开关技术来提高电能的转换效率,但存在许多不足之处:占空比丢失,副边电压振荡,滞后桥臂难实现软开关等。针对滞后桥臂实现软开关问题:文献[4]通过在滞后桥臂的开关管两端并联辅助网络增大其软开关电流,但又限制了变换器的效率。文献[5]在传统移相全桥拓扑结构中加入由电感和开关管构成的辅助网络,实现了全负载范围内一次侧开关管的ZVS。文献[6]采用一种新颖的π型无源网络的移相全桥变换器,减小了占空比的丢失,但增加了元器件,增加了控制的复杂度。针对副边电压振荡:文献[7]采用在整流二极管上并联RC支路,虽然抑制了电压振荡,但是又增加了电路损耗。文献[8]采用副边有源钳位电路,可以抑制电压振荡且不增加损耗,但又增加了开关管,增加了成本。文献[9]采用在传统移相全桥上添加换流电容和LC辅助网络,一定程度上抑制了振荡电压,但滞后桥臂实现ZVS比较困难。根据上述拓扑结构综合考虑,本文选用带钳位二极管的移相全桥拓扑结构,可以抑制副边整流振荡,且不增加额外损耗。
1 移相全桥变换器的拓扑分析
移相全桥实现软开关的控制方式可分为ZVS(zero voltage switching)和ZVZCS(zero-voltage and zero-current-switching)两种,ZVS为在超前桥臂和滞后桥臂均并联二极管和电容,前后桥臂均实现零电压模式。ZVZCS为在超前桥臂并联二极管和电容,滞后桥臂只并联二极管,超前桥臂实现零电压模式,滞后桥臂实现零电流模式[10]。ZVZCS虽不存在ZVS PWM变换器的原边环流,但滞后桥臂为实现ZCS需增加额外电路,增加了控制板的面积,提高了控制与调试的难度,因此电动汽车DC-DC变换器更多选用ZVS控制实现软开关。
根据变压器与谐振电感位置不同,可分为Tr-Lag(transformer lay)型ZVS PWM(pulse-width modulation)全桥变换器与Tr-Lead(transformer lead)型ZVS PWM全桥变换器[11]。由于Tr-Lag型ZVS PWM全桥变换器因其电流小,电流反向时间少,占空比丢失较小,本文选用Tr-Lag型ZVS PWM全桥变换器,在此基础上进行详细的研究。
Tr-Lag型ZVS PWM全桥变换器如图1所示,原边电路由开关管、谐振电感、变压器、钳位二极管构成,变压器与Q2、Q4滞后桥臂相连。

图1 Tr-Lag 型 ZVS PWM 全桥变换器Fig.1 Tr-Lag ZVS PWM Full-Bridge Converter
Tr-Lag型ZVS PWM全桥变换器工作状态共分为18个状态如图2所示,因后9个状态与前9个状态相同,本文只列出前9个状态。其中C1=C3,C2=C4,C5=C6,变压器漏感忽略不计,Lf>>Lr/K2,K变压器变比,Lr为谐振电感,Lf为滤波电感。

图2 Tr-Lag型ZVS PWM全桥变换器主要波形Fig.2 Main waveforms of Tr-Lag ZVS PWM full-bridgeconverter
在t1时刻之前,Q1与Q4导通,D5导通,D6截止,原边向副边传递能量。在t1时刻,Q1关断,电流ip给C1充电,C3放电,导致VAB下降,VCB也跟随下降。由于原边电压VAB下降,副边电压也随之下降,副边接收的能量开始减少,副边整流管D6的寄生电容C6开始放电。该状态直到C1电压充到Vin,C3电压降为零,D3导通时结束。
t1-t2时段,电容C1、C3、C6的电压与ip、iLr分别为
(1)

(2)

(3)
(4)
式中Ia为输出滤波电感电流在t1时刻折算到原边的电流,ω2的表达式如下:
(5)
t2时刻,只有Q4导通,此时Q3满足零电压开通条件,当A点电压降为零,C点电压未降为零时,副边寄生电容C6仍然处于放电,直到C6放电结束,同步整流管D6导通,原边电流小于副边折算值,此时C点电压降为零。
在[t3-t4]时段,只有Q3和Q4导通,副边同步整流管均处于导通状态,为输出电感续流。变压器副边电压为零,原边电压被钳到0V,故A、B、C三点电压均为零。电流保持不变,并且ip=iLr。
在[t4-t5]时段,Q3导通,Q4零电压关断,副边二极管续流。Q2、Q4的寄生电容C2、C4与谐振电感发生谐振,谐振电流把B点电位抬高,直到B点电位高于Vin时,D2自然导通,把B点电位钳为Vin,此时Q2满足零电压开通条件。
在[t5-t6]时段,副边二极管DR1和DR2继续同时导通续流。变压器原边电压被钳为0V,Vin全部反向施加到谐振电感上,此时谐振电流以一定的速率下降,直到谐振电流降为零,D2与D3满足关断条件。
在t6时刻,ip和iLr从零反向增加,此时段Q2与Q3同时导通,实际的原边电流小于副边折算到原边电流值,副边二极管依旧续流,原边变压器电压钳为0 V。Vin电压全加反向到谐振电感上,ip和iLr线性下降,在t7时刻,ip与折算到原边的输出滤波电感电流相等,D5关断,iLf全部流过D6。
在[t7-t8]时段,Q2和Q3同时导通,Lr与副边寄生电容C5发生谐振,给C5充电,原边电流继续增加,当C5充电到4Vin/K,此时VCB减小到-Vin,故钳位二极管D8导通,将VCB钳在-Vin,如果没有钳位二极管,开关管电压峰值可达到-2Vin,损坏管子。该二极管将管子的应力减小一半,降低选管子成本。
在[t8-t9]时段,当D8导通后,ip阶跃下降到折算到原边的iLf,而iLr保持不变,此时两者的电流差值流过D8。该时段内iLf线性增加,ip反向线性增加,导致D8电流越来越小,直到ip=iLr时,D8自然截止。
在[t9-t10]时段,ip与iLr相等,原边给副边传递能量。
2 移相全桥变换器的控制策略
本文采用双闭环补偿对移相全桥控制器进行控制[12],以此提高系统的精度和稳定性。将输出电压Vo与基准电压Vo_ref作差,误差值经过电压控制器PIV(s),其输出量与电流预设值IL_ref比较,最后PI环节输出与载波信号共同控制开关管的驱动信号。

图3 DC-DC变换器的控制策略Fig.3 Control strategy of DC-DC converter
通过对DC-DC变换器的工作状态分析,采用状态空间平均法对其建模,将线性状态方程进行平均化处理,得到了输出电压的传递函数为
(6)
式中:Cf为滤波电容;R为负载电阻;Rd的表达式为
(7)
其中fs为开关频率。输出电流的传递函数为
(8)
设计电路的参数如表1所示。

表1 电路参数表
将表1参数代入式(6)、式(8)中,可得:
(9)
(10)
2.1 电流内环PI控制
由式(10)可以得出未加PI控制的电流传递函数的伯德图,如图4所示。系统的相位裕度接近93°,但截止频率较小,低频段的增益较低。未加PI补偿前,系统为0型,需要通过提高系统的型别,使系统以-20 dB/dec的斜率下降并穿越0 dB线。

图4 未加PI控制的电流传递函数伯德图Fig.4 Bode diagram of current transfer function without PI control
由图5看出,低频增益由47 dB增加到了80 dB,相位裕度为31°,系统的稳态和动态性能得到了很大的提升,改善了系统稳定性。

图5 加PI控制的电流传递函数伯德图Fig.5 Bode diagram of current transfer functionwith PI control
2.2 电压外环PI控制
由式(9)可以得出未加PI控制的电压传递函数的伯德图,如图6所示。在低频段增益较低、下降率几乎为零,从而导致截止频率过大。

图6 未加PI控制的电压传递函数伯德图Fig.6 Bode diagram of voltage transfer function without PI control
加入PI控制后,低频增益从34 dB增加到92 dB,穿越频率为7.8×104rad/s,小于开关频率,证明了PI控制的有效性。

图7 加PI控制的电压传递函数伯德图Fig.7 Bode diagram of voltage transfer functionwith PI control
3 移相全桥关键问题分析
3.1 变压器原边直流分量抑制
因硬件驱动时模拟器件会产生一定的时间误差,此时原边斩波波形会有上下不对称的情况,其中含有直流分量,使变压器发生磁偏甚至饱和,导致变压器不能正常工作。要滤除该直流分量,主要分为三种方式[13]:1)采用电流控制策略,使开关管Q1、Q4与Q2、Q3导通末的电流值相等。2)通过测量变压器原边电压,当直流分量出现时,降低开关的导通时间。3)变压器原边串联隔直电容。由于串联隔直电容操作简单,本文采用第三种方式,即采用隔直电容与变压器串联,防止变压器直流磁化。
3.2 副边同步整流对效率的影响
因副边整流二级管的损耗较大,影响整体效率,因此将二极管换成MOS管,如图8所示。其导通电阻只有几毫欧,并且可以采用多只MOS管并联,进一步减小等效电阻,根据P=I2R,损耗明显减少。副边同步管可以采用变压器自驱动、芯片同步驱动等方法,变压器自驱动会产生部分铜损和增加变压器的寄生参数,因此大多采用芯片同步驱动方式[14]。
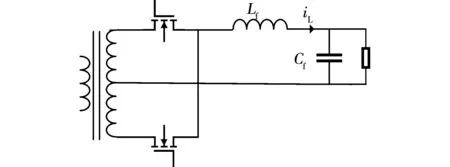
图8 同步整流电路Fig.8 Synchronous rectification circuit
3.3 副边占空比的丢失
副边占空比的丢失指的是副边的占空比Dsec小于原边的占空比D,两者的差值即为所丢失的占空比[15]。如图2中的[t3-t8]和[t12-t17]时段,在这段时间里原边电压不足以提供负载电流,副边整流二极管导通,负载处于续流状态,电压为零。而丢失的占空比为
(11)
式中:Dloss为丢失的占空比;Ts为开关周期。
当Lr越大,占空比丢失越多。为了在负载端得到所需要的输出电压,必须减小原副边的变比。
4 仿真分析
根据本文摘要提出的带钳位二极管的移相全桥拓扑结构,使用MATLAB搭建仿真模型。
图9为四只开关管的驱动波形,从图中可以看出同一桥臂的两个开关管的驱动波形存在明显的死区,且超前桥臂Q1和Q4比滞后桥臂Q3和Q2超前一定的角度开通,故实现了移相控制来控制电压的输出。

图9 开关管的驱动波形Fig.9 Driving waveform of switch
从图10中可以看出开关管近似地实现了零电压开通,一定程度地加少了开关损耗。

图10 软开关波形Fig.10 Soft switching waveform
从图11和图12的对比来看,加入钳位二极管之后,消除了整流二极管的电压尖峰,使得二极管的电压更加平稳。

图11 未加钳位二极管时整流管电压波形Fig.11 Voltage waveform of rectifier without clampdiode

图12 加钳位二极管时整流管电压波形Fig.12 Voltage waveform of rectifier when clamp diodeis added
从图13可以看出,输出电压经过短暂的上升之后到达稳定状态。

图13 输出电压波形Fig.13 Output voltage waveform
5 试验测试及结果分析
为了验证上述分析的可行性,试制了一台移相全桥ZVS控制的样机如图14所示,其功率3 kW,输入电压范围350~700 V,输出电压为27 V。

图14 Tr-Lag型ZVS PWM全桥变换器实物Fig.14 Tr-Lag ZVS PWM full-bridge converter
根据图14的实物测出如图15、图16的额定状态下和最大峰值时驱动波形及应力波形。

图15 MOS管的驱动波形及应力波形Fig.15 Driving waveform and stress waveform of MOS tube

图16 效率与输入电压及输出功率关系图Fig.16 Relationship between efficiency and input voltage and output power
由于考虑到样机的小型化,故采用输入电压400 V、频率为75 kHz的驱动信号,占空比设置在48%左右,留出上下桥臂死区时间及实现ZVS时给寄生电容充放电时间。虽然图15(a)与图15(c)中驱动时共模干扰的存在,驱动波形会有尖峰干扰信号,但并不影响驱动效果。根据理论分析,Tr-Lag型ZVS PWM全桥变换器不加钳位二极管时,其副边寄生电容谐振变换到原边管子的最大应力电压为2Vin,为800 V左右。当加入钳位二极管时,二极管将应力电压钳为Vin左右,如图15(b)和图15(d)所示,电压应力最大为457 V,振荡超调量明显降低,管子留有的裕量完全可以满足管子应力的需要,钳入电压越高,效率越低,其原因为:电压越高,变压器并没有得到充分应用;移向全桥控制过程中存在零状态,即原边电流处于自然换流状态,电压越高,零状态存在的时间越长。同等输入电压下,大的输出电流使得效率略有下降。输入电压与输出电流对效率的影响在可接受范围之内,其整体效率接近97%。
6 结 论
本文针对电动汽车车载DC-DC变换器进行研究,首先在理论上明确了带钳位二极管的ZVS PWM全桥变换器的优越性,通过分析得出Tr-Lag型ZVS PWM全桥变换器具有转换效率高、输入电压范围宽的特点,更加适用于电动汽车;进而对隔直电容和副边同步整流的作用进行了详细的讨论,可以将MOS管的应力抑制在输入电压范围之内,并设计了实验测试电路进行验证,论证了Tr-Lag型ZVS PWM全桥变换器的效率较高,完全适合电动汽车对DCDC模块损耗小的要求,能够有效地减小电池的能源损耗,提高电动汽车的行驶里程。
