基于扩展卡尔曼滤波的三轴气浮台质心位置测算方法
2021-10-11胡奇飞
胡奇飞,李 稳
(中联恒通机械有限公司,湖南 长沙 410073)
0 引言
三轴气浮台通过气浮球轴承实现近似无摩擦的系统来模拟太空失重环境,需要通过调平衡装置将质心调节到转动中心的位置以消除重力带来的干扰力矩。因此,调平衡技术是实现高精度气浮台的关键技术。一般而言,自动调平衡技术较人工调平技术效率高、精度高,是当前研究的热点。
为实现精确调平衡,必须先测算出质心的精确位置。通过Pro/E软件建立气浮台的三维模型,可以初步计算气浮台的质心位置,但由于电线、焊接点等零部件建模存在困难,这一方法无法精确计算出质心的位置。起初,研究人员通过测量气浮台的摆动周期来测算质心位置的偏移,进而进行配平。这种方法将气浮台等效为3D复摆[1],但这一方法需要反复测量气浮台的摆动周期,所需调节时间较长。随后,人们提出基于气浮台的刚体动力学方程来控制执行机构,调节质心位置,文献[2]给出了通过2个倾角传感器实现水平方向自动配平的方法,文献[3]和文献[4]提出了在已知转动惯量的情况下计算质心的方法。
本文通过建立三轴气浮台的动力学模型,采用基于最小二乘法和扩展卡尔曼滤波处理姿态信息、计算质心位置,求解配重滑块位置,实现气浮台自动调平衡,并与周期反馈算法进行比较。
1 三轴气浮台动力学模型建立与数值仿真
1.1 三轴气浮台全物理仿真设备
三轴气浮台由支撑座、气浮球轴承和转动台体三部分组成。气浮球轴承通过球窝上布置的喷嘴喷出高压气体,在球窝与球头间形成一层极薄的气膜,实现三轴近似无摩擦转动。气浮台采用伞形结构,其三维模型如图1所示。
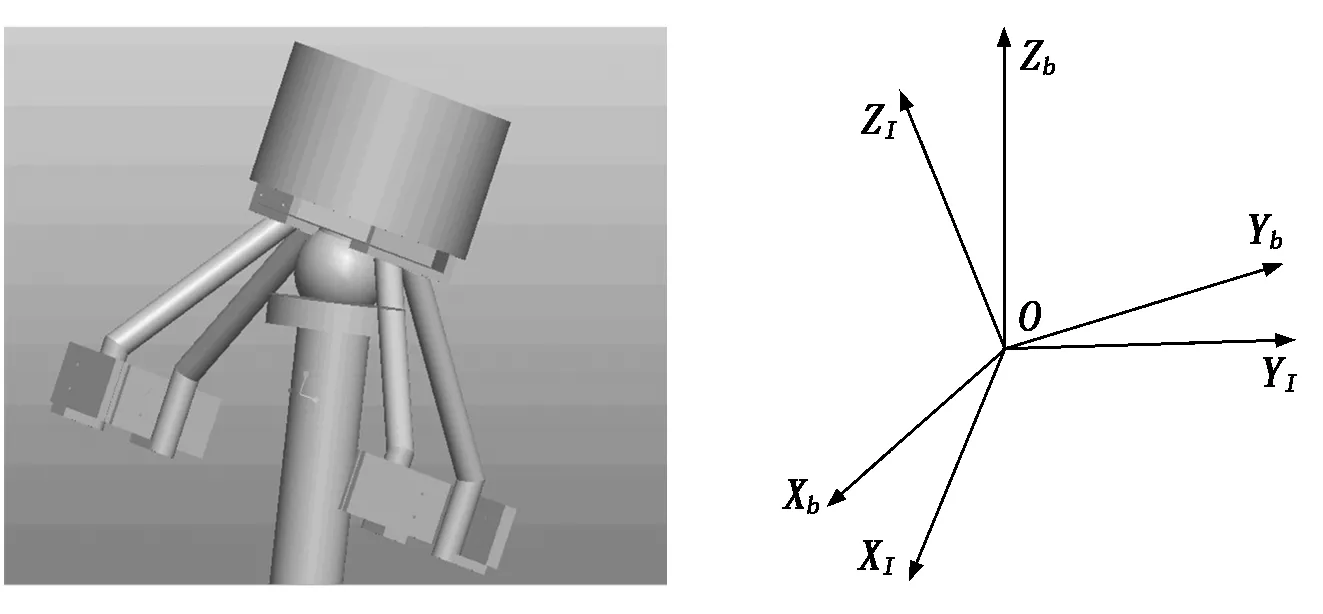
图1 气浮台三维模型 图2 惯性坐标系和随体坐标系
通过Pro/E建立的三维模型计算得到气浮台的质量m=136.953 22 kg,其质心位置偏移r=[0,0,-1.851 949 3×10-3] m,气浮台相对于转动中心(球头球心)的转动惯量为:
(1)
其中:Ixx、Iyy、Izz分别为气浮台相对于X、Y、Z的转动惯量;Ixy、Ixz、Iyx、Iyz、Izx和Izy均为惯量积。
台体上布置一个两轴倾角仪,输出频率为100 Hz,精度为0.002°,测量台体角度信息,通过数据处理可测得台体的摆动周期。
1.2 三轴气浮台动力学模型
以三轴气浮台的转动中心作为原点建立随体坐标系O-XbYbZb和惯性坐标系O-XIYIZI,如图2所示。


(2)
其中:ψ为偏航角;θ为俯仰角;β为滚转角。
对于欧拉角速度方程,有:
(3)
又有动量矩定理:

(4)
其中:M0为作用于气浮台的外力矩矢量和;L0为气浮台质心的动量矩。
由于气浮台旋转中心与质心不重合,所以又有:
(5)
其中:r为质心偏移量;Lc为气浮台相对于质心的角动量;ω为气浮台相对于惯性坐标系的角速度。
Lc的计算公式为:
(6)
将式(5)和式(6)代入式(4),可得:


其中:A为角动量运算矩阵;B为轴向偏移分量;M为重力干扰力矩(这里不考虑重力以外的其他干扰力矩),其计算公式为:

考虑到台体转速较慢,ω、r均为小量,只考虑主惯量情况下简化得:
(8)
其中:rx、ry、rz分别为质心在x、y、z轴的偏移量。
2 基于复摆模型的质心位置测算方法
当气浮台小角度摆动时,可以将台体近似作为复摆处理。将气浮台的运动分解,假设只绕X轴运动,复摆周期为:
(9)
其中:I为转动惯量。
则由式(9)可求解得到质心在竖直方向的偏移为:
(10)
水平方向质心偏移为:
(11)
其中:α为X轴倾角;χ为台体转动180°后的倾角。
通过电机上移4个外伸臂的滑块,气浮台摆动周期增大,通过式(10)换算得出气浮台质心,如图3所示。
图3(a)可以看出,气浮台摆动周期从22 s调整到160 s耗时15 min左右,通过式(10)和式(7)可求得垂直方向质心偏移量约为2.78×10-5m,此时系统干扰力矩约为0.82×10-2Nm。由图3(b)可以看出,水平方向质心偏移量在加大,气浮台平衡性变差。

图3 周期反馈算法气浮台质心调试效果
3 基于动力学反演的质心位置测算方法
3.1 基于最小二乘法的质心位置测算方法
设第1个测量时间为t1,第2个测量时间为t2,Δt=t2-t1,基于式(8),变形可求解质心位置:
(12)


将式(12)写为:
ΔΩ=Φr.
(13)
其中:ΔΩ为角速度增量数组;Φ为3×3矩阵。
则求广义逆矩阵,质心的偏差可通过最小二乘法求得为:
r=(ΦTΦ)-1ΦTΔΩ.
(14)
通过最小二乘法,计算得到质心的位置如图4所示,质心测算速度比周期反馈算法快,但始终存在一定的水平质心偏移量。
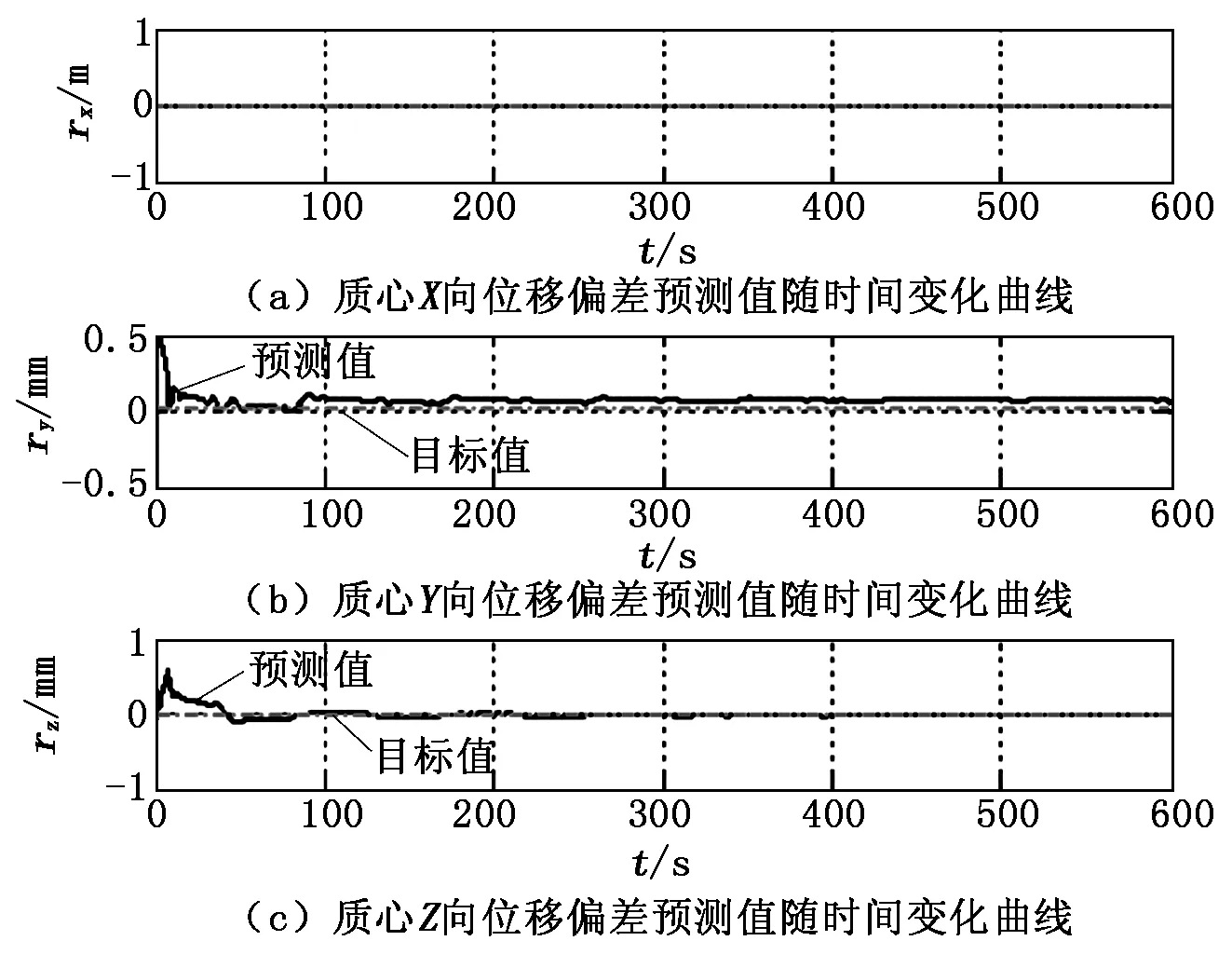
图4 基于最小二乘法的质心位置测算结果
3.2 基于扩展卡尔曼滤波(EKF)的质心位置测算方法

(15)
(16)

状态转移矩阵为:
(17)

(18)
观测矩阵为:
(19)
预测状态的协方差矩阵Rk与滤波增益矩阵Kk分别为:
(21)
(22)
状态值和协方差矩阵更新为:
(23)

由图5可知,EKF滤波对于质心位置的测算收敛速度与最小二乘法相差不大,都优于周期反馈算法;但EKF滤波偏差较最小二乘法小,能更精确地测量质心位置。

图5 基于EKF滤波的质心位置测算结果
4 实验结果与分析
在三轴气浮台上,以气浮台摆动周期大于160 s为目标,此时系统的干扰力矩小于10-2N·m,分别采用周期反馈算法、基于最小二乘法的质心算法和基于EKF的质心算法进行调试。三种算法各取3次调试结果,如表1所示。

表1 三种不同算法的气浮台周期与质心调试效果对比
由表1可以看出,气浮台摆动周期调整到160 s,周期反馈算法耗时最多,需要1 050 s左右;最小二乘法和EKF质心算法耗时相近,为630 s左右;调整结束后,Y轴偏摆角度周期反馈算法最大,为4°~5°,EKF算法最小,为1°左右,质心位置测算最精准。
5 结论
本文建立三轴气浮台的动力学模型,通过数值计算,仿真其运动过程中的角度和角速度变化。其次通过实验测量的角度变化,计算气浮台的摆动周期,从而测算质心的位置。再次,通过动力学反演的方法,采用最小二乘法和EKF处理姿态信息,并分析质心位置的计算速度与精度。最后在气浮台上分别采用上述三种算法进行调试,从实验结果分析得出,基于EKF算法的调试时间最短,质心位置精度最高。
