基于肌张力反馈的深层肌肉刺激仪控制系统设计
2021-09-26宫迎娇张元良
宫迎娇,张元良,孙 源
(大连理工大学机械工程学院, 辽宁大连 116024)
0 引言
深层肌肉刺激仪主要通过机械振动作用于人体肌肉组织,达到减少筋膜粘连、缓解疼痛、减少乳酸堆积等效果,目前在康复治疗、运动损伤治疗以及神经性疾病的辅助治疗中都有着广泛的应用[1]。肌肉刺激仪出现之初,振动频率较为固定,治疗范围也仅限于运动造成的肌肉损伤康复,功能较为单一。随着技术的进步,深层肌肉刺激仪也渐渐得到了发展,例如,出现了可以通过控制频率来调节刺激深度的肌肉刺激仪、多路振动治疗仪等新型仪器。深层肌肉刺激仪的功能得到丰富,稳定性及智能化程度也都得到提升。
随着深层肌肉刺激仪应用范围的拓展,医疗界对其智能化的需求也逐渐增加。通过分析市面上现有的同类仪器发现,其控制方式往往由医护人员凭借经验手动控制,缺少适当的反馈控制。若在控制系统中加入合理的参考量作为反馈,深层肌肉刺激仪的智能化程度将得到大幅度的提升。
肌张力(Muscle Tone)是指肌肉松弛状态下的紧张度和被动运动时遇到的阻力。肌张力的大小可以表征多种神经性疾病,例如脊髓前角灰质炎、小脑病变、脑卒中等[2]。本文在深层肌肉刺激仪控制系统中加入肌张力检测环节,并通过测得的数值对当前治疗效果进行反馈,可以使仪器功能得到丰富,大大提升仪器的治疗效果。
1 系统总体设计
肌张力大小反映了肌肉静止时的紧张程度或运动时的牵引力。肌张力又分为静止性肌张力、姿势性肌张力和运动性肌张力。例如人在放松卧床休息时,肌肉之间的张力成为静止性肌张力,维持站立姿势时,需要靠肌肉维持身体稳定;此时肌肉的张力成为姿势性肌张力;人在走路或其他运动时,肌肉为保持运动过程连续、平滑而提供的张力成为运动性肌张力[2]。
肌张力的大小可作为许多肌源性疾病或神经性疾病的表征。医学研究显示,例如进行性肌营养不良症(Progressive Muscular Dystrophy)、多发性肌炎(Polymyositis, PM)、单神经病(Mononeruopathy)、肌萎缩性侧索硬化(Amgotrophic Lateral Sclerosis)等疾病和都会导致肌张力减低。而Parkinson病、Huntington 舞蹈病、变形性肌张力障碍(Dystonia Muscu⁃lorumdefoumans)等疾病都会导致肌张力增高[3-5]。深层肌肉刺激仪在类似于上述肌源性疾病或神经性疾病的治疗或辅助治疗过程中应用非常广泛,因此,将肌张力反馈环节加入深层肌肉刺激仪控制系统中,能够让仪器实用性更强,使用更加方便[6]。根据肌张力大小来调节刺激频率,可大大节省人工成本,提高仪器的治疗效率,使仪器更加智能化、人性化[7-9]。
系统选用功能丰富强大的STM32 单片机为核心控制器,该单片机运算能力强大,可满足系统控制需求。系统选用57BL06型无刷直流电机,由电机通过软轴带动凸轮的方式产生振动,以实现对深层肌肉进行振动治疗的功能。电机采用三相全桥驱动方式,并利用正弦波调制(SPWM)的方式实现对其转矩、转速的控制。系统主要分为单片机模块、电机控制模块、人机交互模块、肌张力采集模块、报警指示模块、调试接口以及电源模块组成。控制系统框图如图1所示。
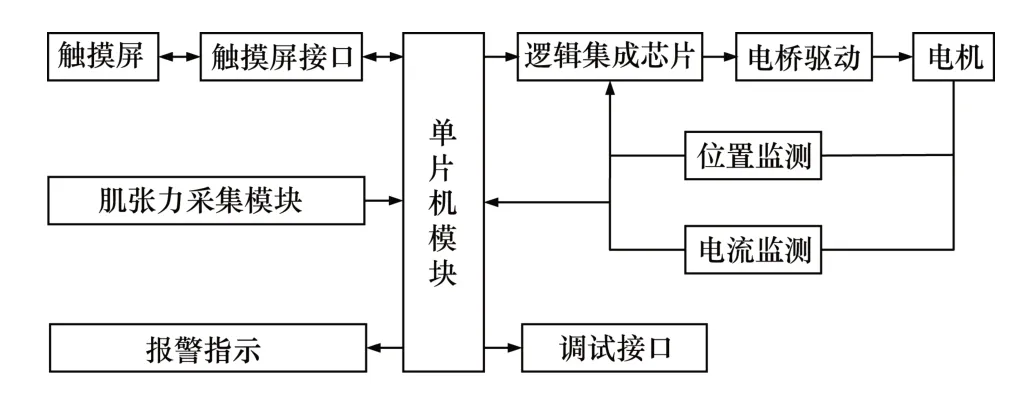
图1 深层肌肉刺激仪控制系统
直流无刷电机通过电桥驱动,并由驱动控制IC 进行控制。为保证电机运行的稳定性,采用速度环与电流环双闭环控制的控制方法,因此需要位置监测和电流监测电路,并将位置信息及电流信息分别传输至驱动控制IC 和STM32 单片机,对电机的运行进行控制。为方便使用,人机交互模块采用触摸屏,通过接口电路将其与单片机相连,实现数据显示以及指令的采集。肌张力采集模块主要由肌张力传感器以及滤波、放大电路组成。此外,系统还需要蜂鸣器报警电路对异常情况进行报警,指示灯进行上电指示,以及相应的调试接口进行程序烧录等。
通过查询上述各模块需要的供电电压,设计深层肌肉刺激仪控制系统的供电方案如图2所示。
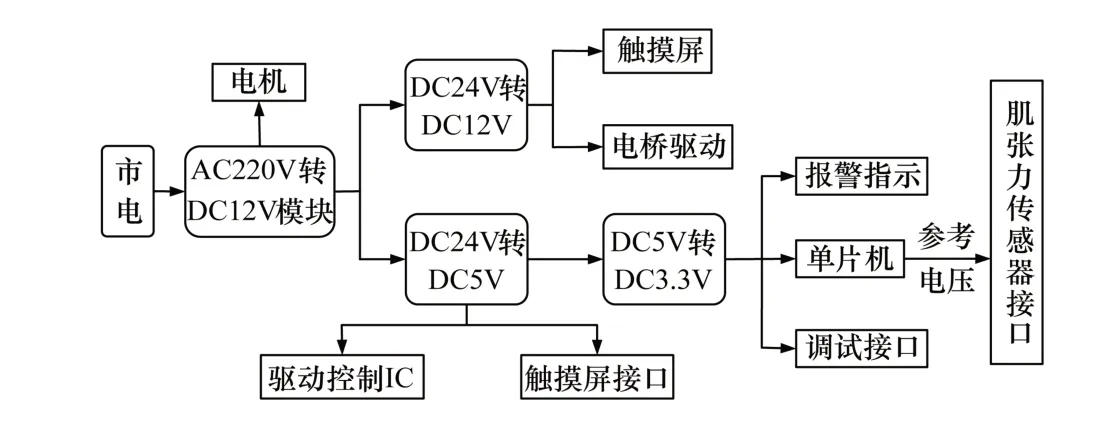
图2 深层肌肉刺激仪控制系统供电方案
首先,由AC220 V 转DC24 V 模块将220 V 交流市电转换为24 V直流电,并为无刷直流电机供电;再分别设计24 V转12 V以及24 V转5 V电路将24 V直流电分两路转换为12 V和5 V直流电,其中12 V直流电为屏幕和电桥驱动电路供电,5 V直流电为驱动控制IC 及触摸屏接口电路供电;最后由5 V 转3.3 V 电路得到3.3 V 直流电,为STM32 单片机以及其外围的报警指示电路、调试接口电路供电。
2 系统主要模块硬件电路设计
2.1 单片机基准电源
单片机模块电路主要为单片机最小系统,包括电源电路、晶振电路以及复位电路。此外,由于系统中肌张力检测模块应用了STM32内部的ADC模块,故还需要增加基准电源电路,为ADC提供模数转换时所需的参考电压。单片机基准电源模块电路如图3所示。
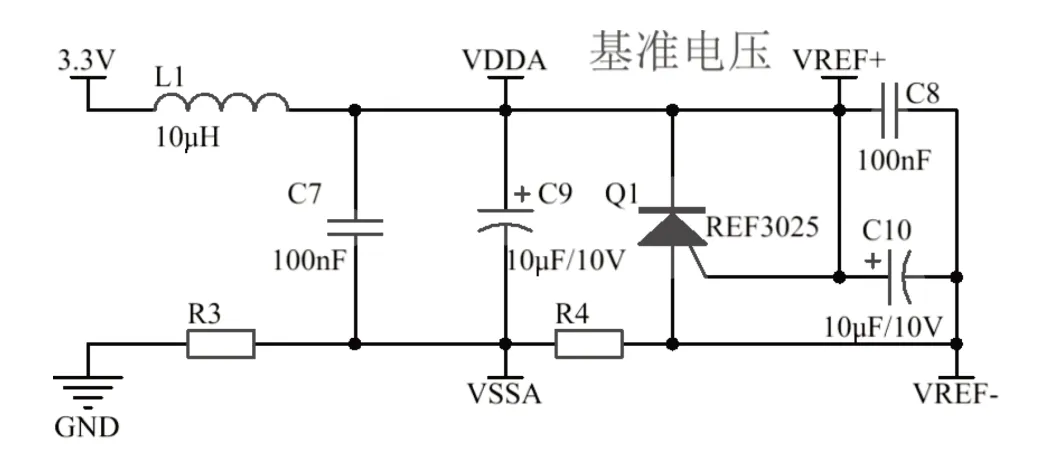
图3 单片机基准电源模块电路
该电路的核心元件REF3025 是一种电压基准芯片,其主要功能为:在电压输入端输入2.501~5.5 V 电压,电压输出端将输出恒定的2.5 V电压,从而为单片机中的ADC提供参考电压。RLC 部分电路的主要作用为隔离、滤波和缓冲,C7、C8主要用于滤除高频干扰信号,钽电容C9、C10 的作用是滤除低频干扰信号。
2.2 电机控制模块
电机控制模块主要包括驱动控制IC电路和电桥驱动电路两大部分,其中驱动控制IC部分还应考虑电流监测和位置监测电路。
选用无刷直流电机专用给的驱动控制芯片JY01 进行控制,该芯片的作用为接收电机内置的霍尔传感器采集的转子位置信息,经过运算处理后输出换向信息,使电机连续运转,同时将运算获得的电机转速信息传递给单片机外部中断引脚,实现电机的速度闭环控制。该芯片还负责采集电机母线电流信息,起到保护电路的作用,实现电流闭环控制。驱动控制IC电路如图4所示。
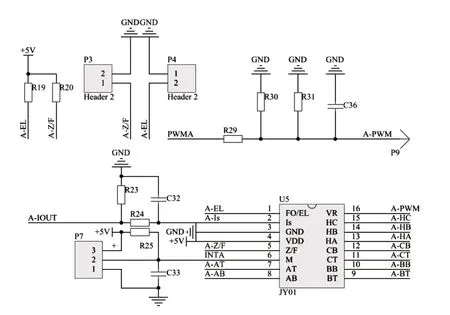
图4 驱动控制IC电路
驱动控制芯片通过控制逆变器实现电机定子的换向。系统采用三相全桥的驱动方式,选用IR2101 芯片作为驱动芯片,由该芯片同时驱动两个IRF540 型号的N 型MOSFET 功率管,实现对电机的驱动。IR2101 芯片采用自举的方式驱动桥臂上的MOSFET管,采用SS16型肖特基二极管(D9)作为自举二极管,C38是自举电容,为1 μF的高质量钽电容。图5所示为IR2101驱动电路。
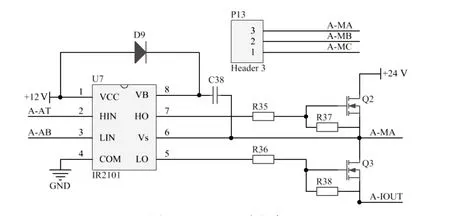
图5 IR2101驱动电路
2.3 肌张力传感器接口电路
肌张力传感器为桥路输出,产生的信号较为微弱,需要经放大电路放大到与单片机匹配的电压后才能传输到单片机进行处理。图6所示为肌张力传感器接口电路。LM358为运算放大器,为了防止单级放大倍数过高带来的非线性误差,放大电路采用两级放大,前一级放大倍数约为10倍,后一级约为3倍。从电桥获取的差分信号通过放大电路后输入单片机内置12位ADC的输入引脚。肌张力传感器接口由单片机提供的参考电压供电。
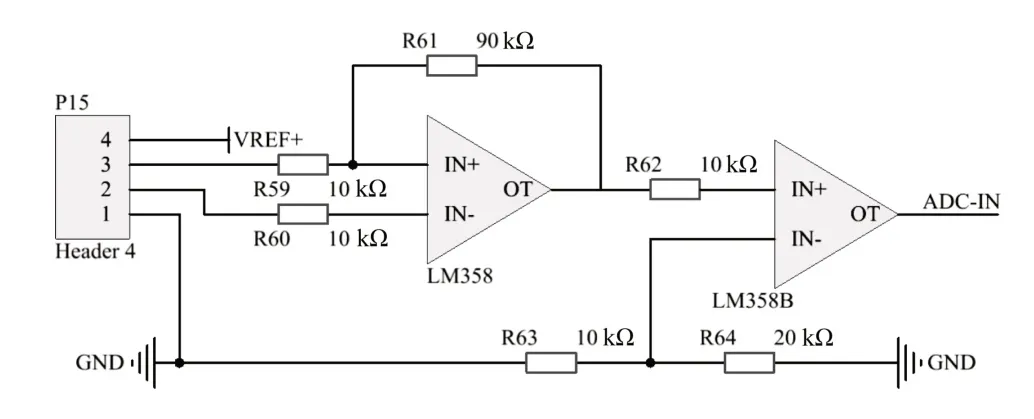
图6 肌张力传感器接口电路
2.4 电源模块
根据前述供电方案,设计电源模块电路如图7所示。
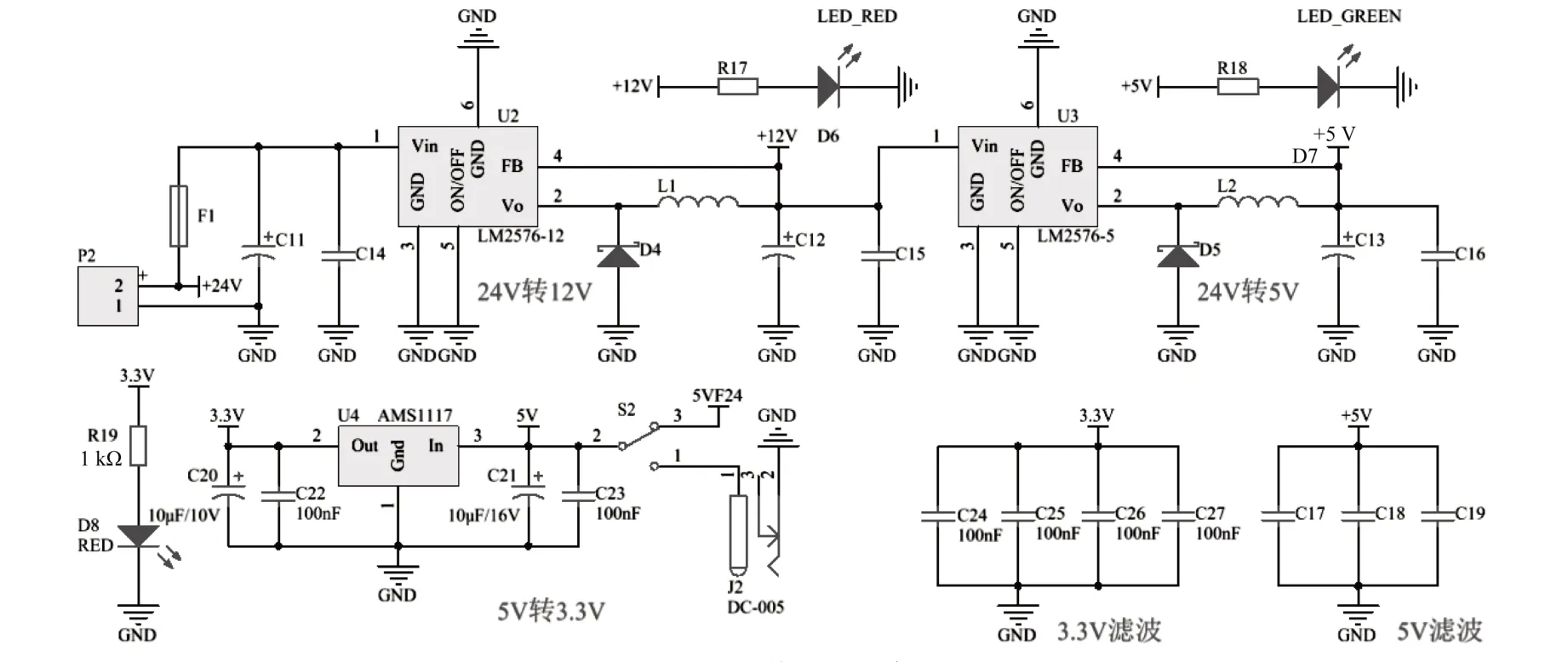
图7 系统电源电路
分 别 选 用LM2576-12 和LM2576-5 作 为DC24 V 转DC12 V、DC24 V转DC5 V转换芯片。AC220 V市电转DC24 V模块为外购件,故在原理图中不做表示。选用AMS1117 芯片为DC5 V转DC3.3 V转换芯片,单片机及驱动控制芯片等需要较为稳定的供电电压,故需要对5 V 和3.3 V 电压进行滤波处理。多个电容并联可得到更好的滤波效果。
3 系统软件设计
为实现对深层肌肉刺激仪的合理控制,引入了实时操作系统。μC/OS-Ⅱ是一种常用的嵌入式实时操作系统,同时,μC/OS-Ⅱ为开源操作系统,方便在各开发平台上的移植。参考官方移植说明,将系统底层代码进行移植,根据不同的硬件模块,对相应的控制任务进行划分,并编写相应的用户代码。用户代码则根据控制需求将系统划分为多个任务,系统软件框图如图8所示[10]。
系统调试任务主要应用于系统调试阶段,通过单片机串口与PC机通讯,完成程序烧录等功能。参数存取任务主要为参数在单片机EEPROM 中的写入和读取,系统启动时,从EEPROM 中读取参数,运行过程中则通过该任务将需要保存的参数写入EEPROM。蜂鸣器报警任务为通过单片机I/O口设置蜂鸣器,使其报警,主要用于系统故障、违规操作等情景下对操作人员的提示。触摸屏任务主要为单片机通过串行口于触摸屏进行数据通讯,将当前运行数据写入触摸屏,并从触摸屏中读取控制信息,对电机进行下一步调节。肌张力检测任务是通过传感器对肌张力进行采集,开启单片机ADC通道进行模数转换,并将转换得到的肌张力参数值用于电机调速任务。电机电流监测任务为对电机母线电流的监测,电流达到上限值时限制电机转速使其不再增加,实现过流保护。电机速度监测任务是单片机通过霍尔传感器测得的位置信息计算出转子实际转速,用于电机速度调节。电机调速任务为单片机运用PID 算法,根据肌张力值、电流值、当前电机转速以及设定转速计算输出控制量,使电机根据要求进行加速、减速或保持当前速度运转。
μC/OS-Ⅱ操作系统采用按优先级抢占式规则进行任务管理与调度。进行任务划分时,需要设定各个任务的优先级。μC/OS-Ⅱ操作系统最多可创建64 个任务,故最多有64 个优先级。优先级用0~63 中的整数表示,数值越小,优先级越高。对于用户任务而言,对实时性要求较高的任务应分配较高优先级。以上任务中,因系统调试任务只在调试阶段烧写程序时使用,故对实时性要求最低;参数存取任务和蜂鸣器报警任务对实时性要求也都较低;触摸屏任务需要进行数据进行命令解析,对实时性要求中等;由于电机调速任务需要肌张力信号、电流信号以及当前电机转速信号,故肌张力检测任务、电机电流监测任务、电机速度监测任务都要在电机调速任务之前运行。各个任务优先级划分如表1所示。

图8 系统软件框图
4 结束语
本文将肌张力反馈引入深层肌肉刺激仪控制系统,丰富了现有仪器的使用功能,提高了仪器的智能化程度和使用效率,使深层肌肉刺激仪控制系统进一步完善。系统使用的STM32 系列单片机功能强大,引脚丰富,使深层肌肉刺激仪有良好的可扩展性。采用μC/OS-Ⅱ操作系统,可实现控制任务间的灵活调度,保证电机对调节信息的快速响应,实现系统的稳定输出,保证系统稳定性和安全性。本系统具有良好的应用和发展前景。
