新型半潜式双模块风机结构动力响应分析
2021-09-25苏现进宋育新周道成任年鑫
苏现进,宋育新,周道成,任年鑫
(1.大连理工大学 深海工程研究中心,辽宁 大连 116024;2.中国石油广西石化分公司,广西 钦州 535008;3.海南大学 土木建筑工程学院,海南 海口 570228;4.海南大学 南海海洋资源利用国家重点试验室,海 南 海 口 570228)
0 引言
随着世界各国对可持续发展的关注,绿色能源成为各国能源发展的方向。风力发电是绿色新能源领域中较为成熟、具备规模化开发建设的发电项目。在风电项目的快速发展中,海上得天独厚的风能资源使得海上风电场建设逐步成为风电发展的主战场。海上风电场较陆上风电场具有节约土地资源、对环境污染小的优点[1]。对中国来说,海上风力资源在水深大于50 m的深水域潜力更大[2]。在水深大于50 m的区域固定式基础已经无法满足经济性要求,而漂浮式风机是这一区域最适合的选择[3]。
海上浮式风机(FOWT)概念是由Heronemus W E[4]提出的,由于技术不成熟以及成本过高,在近几年才开始逐渐得到发展。目前的FOWT基础主要分为3种:Spar型基础、TLP型基础和半潜型基础。其中,半潜型浮式风机因其具有稳定性好、适用水深范围广和建造运输方便等优点而备受各国关注。美国可再生能源实验室(NREL)提出了5 MW半潜式风机平台[5]。Roddier D[6]依据NREL提出的5 MW风机平台设计了三浮筒浮式半潜平台,并将风机放在了其中一个浮桶上,通过在频域内模拟浮式风机的动力响应,分析了该方案的适用性。Liu Y L[7]基于水箱试验和数值模拟,提出了一种新颖的各部件水动力系数模型,考虑了相互作用、频率和振幅对FOWT各部件水动力系数的影响,并通过所提出的水动力系数模型成功地模拟了位于平台底部的裙板的影响。
文献[8]针对各种使用需求和海况研究了多种多样的模块化多浮体概念设计模型,模块化多浮体系统通常由多个基本模块通过刚性或柔性的连接器连接而成。每个模块可以简化为一个刚体,而整个多浮体系统由于模块柔性连接器的存在而具有一定的柔性。相比刚性连接器,柔性的铰接式或半刚性连接器能够有效地减小模块化多浮体系统的水弹性响应[9]。Paulling J R[10]分析了由4个半潜式模块通过兼具弹性和阻尼特性的铰连接组成的RMFC(刚性模块柔性连接)模型。Ren N X[11]分析了一种单桩式5 MW风机和垂荡式波浪能发电装置(WEC)的集成系统在典型运行海况下的水动力响应特征,并进行了试验验证。Wang Y T[12]通过数值模拟和物理模型试验方法,研究了半潜式张力腿系泊系统的单模块(SMOD)的运动响应。
现有技术中,海上风机的安装方法主要包括分体安装和整体安装[13]。由于海上风浪的影响,浮式平台在采用分体安装时,平台基座位置极其容易发生较大运动,从而进一步加大对接的难度。
本文通过AQWA软件建立了一种新型半潜式双模块风机集成结构的空气动力与水动力耦合时域数值模型,重点研究该集成结构在典型海况下的运动响应特征,以揭示此种新型半潜式双模块风机集成结构的可行性,在证明该集成结构便于安装的同时,还可以单独替换风机模块。
1 理论基础及数值模型
1.1 半潜式双模块风机结构概述
本文基于BEM方法和势流理论提出了一种新型半潜式双模块浮式风机集成结构,该集成结构示意图如图1所示。
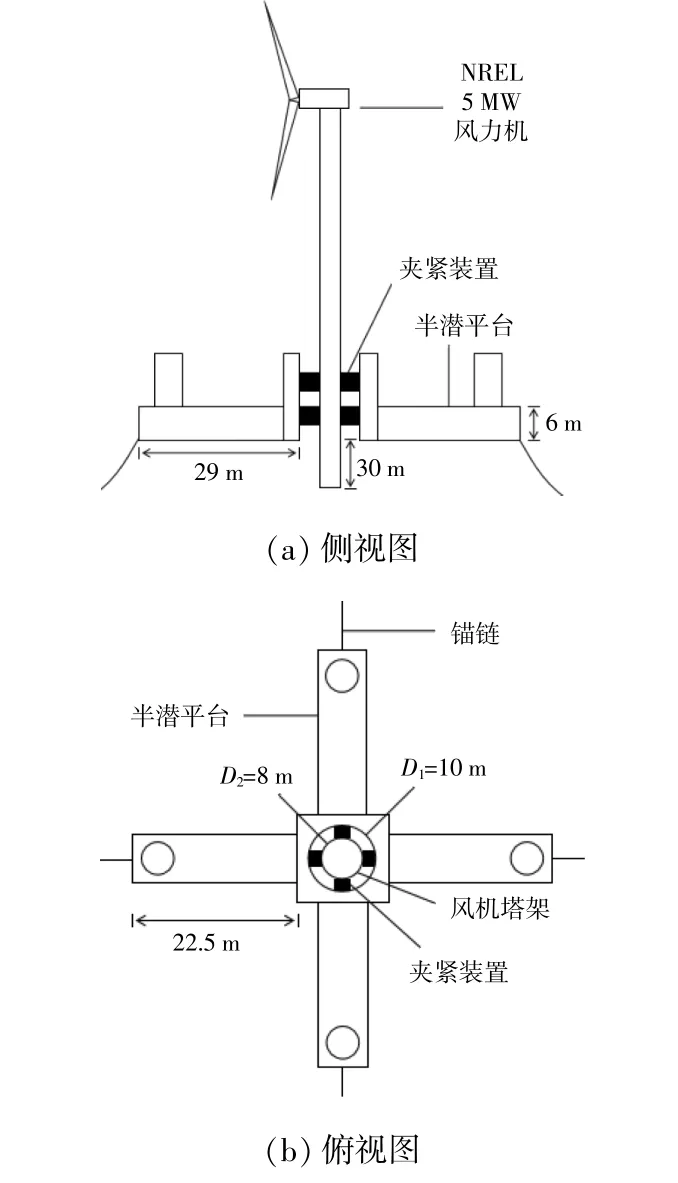
图1 半潜式双模块海上风机结构示意图Fig.1 Schematic diagram of the semi-submersible dualmodule floating offshore wind turbine
该双模块集成结构系统主要包括5 MW风机浮体模块、半潜平台模块、锚链装置和平台与风机支撑塔架结构的夹紧装置。
所述风机浮体模块与半潜式平台模块均具有重力与浮力自平衡特征,半潜平台模块中心处设置一个内径略大于风机塔架外径的贯通的空柱体(二者间距为0.5 m)。风机模块底部可以穿过套筒进入海中,然后通过夹紧装置固定。半潜平台模块与风机模块通过垂向多层对称夹紧装置锁定连接。该平台采用4根锚链进行锚泊约束,分散布置在平台周围,两两夹角为90°。半潜式双模块风机平台的主要参数见表1。

表1 半潜式双模块风机平台的主要参数Table 1 Main structure design parameters
1.2 时域运动控制方程
在集成系统的时域分析中,考虑了风、浪、流联合作用下整体结构的非线性耦合响应,且将集成结构系统等效简化为两个刚体耦合动力系统。该集成结构的动力方程为

式中:M为质量矩阵;X为位移矩阵;δ为阻尼矩阵;K为刚度矩阵;Fe为耦合波浪荷载矩阵;Fd为锚链受力矩阵;Fw为风荷载矩阵;Fc为风机塔架与半潜平台机械耦合荷载矩阵;Fl为流荷载矩阵。
除M外,其余参量均为时间t的函数,各参量矩阵中的下标1和2分别表示半潜平台和NREL Baseline 5 MW风机。
1.3 空气动力载荷分析
本文选取NREL Baseline 5 MW海上风机叶片性能的公开设计参数[5],其对应风速-水平推力曲线和风速-输出功率曲线如图2所示。相关空气动力载荷计算主要基于BEM理论。

图2 不同风速下水平推力和输出功率Fig.2 Thrust force and power under different wind speeds
1.4 水动力载荷分析
基于势流理论,利用AQWA[14]程序求解用于该集成结构系统耦合水动力荷载。AQWA程序可以有效地模拟半潜平台系泊、二阶波浪力荷载、多体间的机械(弹簧-阻尼)动力耦合效应和水动力耦合等问题。双模块集成结构系统的水动力模型如图3所示。

图3 水动力模型Fig.3 Hydrodynamic model
1.5 流载荷分析
本文将流荷载简化为均匀流,即假设流速是固定值,不随时间与水深的变化而变化,在结构设计时,选用南海近海海域十年一遇的流速作为设计值,其计算公式为

式中:Cc为阻力系数;ρ为流体密度;Ad为模型水下部分沿流方向的投影面积;Vc为流速。
2 典型规则波海况模拟
根据已构建的新型半潜式模块化海上风机集成结构模型,建立与之相似的常规整体式的半潜风机平台模型。通过在典型海况下对比分析两种平台结构的动力响应特征,揭示双模块风机平台结构的可行性。
选取典型规则波浪(波高为2 m,周期为4~12 s),对比研究双模块风机结构与常规单体风机结构的动力响应特征,结果如图4所示。

图4 规则波海况两种平台主要参数对比Fig.4 Main parameters comparison of the two platforms under regular sea conditions
由 图4(a)~(d)可 知:两 种 平 台 的 纵 荡、纵 摇和最大锚链力响应幅值的变化趋势几乎完全相同,且纵荡和最大锚链力在数值上也相差不大,但多体的纵摇显著好于常规整体风机结构;两个模块间的机械耦合力在6 s时纵荡支座力达到最大值495.41 kN,在4 s时纵摇的力矩达到最大值20.58 MN·m;纵摇最大值对应的波浪周期与结构的尺寸相关。
由图4(e)可知,多体在纵摇上比单体运动响应更小,这是因为双模块平台在纵摇方向的附加质量明显大于常规单体结构。纵摇上的优势将会在一定程度上减小成本,同时给未来其他模块的添加提供了可能性。
3 典型风浪联合运行海况模拟
为了验证新型双模块平台在典型运行海况下的动力响应特征和输出功率特征,选取额定风速运行海况(风速v=11.4 m/s,有义波高Hs=3 m,谱峰 周 期Tp=8 s,JONSWAP谱 λ=3.3)。假 定 入 射 波浪和风荷载均沿X轴同方向作用,重点研究该新型集成结构系统在此运行海况下的动力响应特征,并与对应常规单体风力机结构模型进行对比分析,主要结果如表2所示。
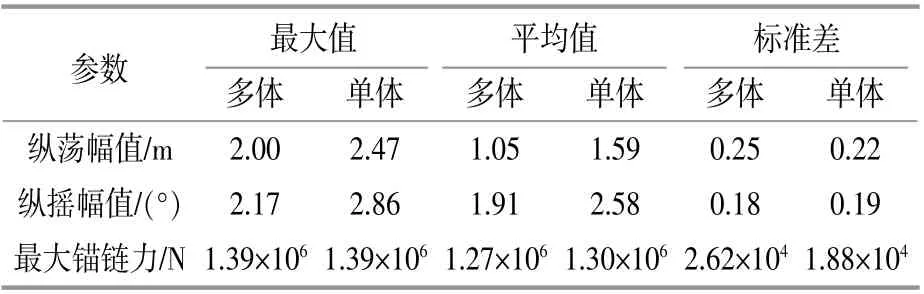
表2 运行海况下两种平台主要动力响应对比Table 2 Statistical information for the dynamic response under the operational sea case
由表2可知:多体的纵荡幅值的平均值较单体降低了33.96%,多体的纵荡幅值的最大值较单体降低了19.03%;多体的纵摇幅值平均值较单体降低了25.97%,多体的纵摇幅值的最大值较单体降低了24.13%;多体和单体的最大锚链力最大值没有差别,多体的最大锚链力平均值较单体略有降低。结合图4(e),多体结构两部分附加质量叠加后明显大于单体,所以双模块平台在纵荡和纵摇上的优势表现比仅波浪荷载作用时更加明显。
结合工程实际可知,在额定功率下运行时,新型双模块半潜平台不仅有着更好的稳定性,还可以降低纵荡和纵摇方向上的部分成本,两个方向运动幅值的大幅降低也提高了未来其他模块加入的可能性。
4 极端海况下运动响应分析
为了进一步验证该新型双模块半潜平台在极端海况下的安全性,选取极端海况 (v=30 m/s,Hs=6 m,Tp=10 s,λ=3.3,流 载 荷 为 均 匀 流,海 平 面流速为1.0 m/s),假定入射波浪和风荷载均沿X轴同方向作用,考虑风、浪、流耦合效应。此时风力机已处于停机状态(大于25 m/s的切出风速),将新型双模块半潜平台的动力响应极值与对应常规单体结构进行对比分析,结果如表3所示。

表3 极端海况下两种平台主要动力响应对比Table 3 Statistical information for the dynamic response under the extreme sea case
由表3可知:多体的纵荡幅值的平均值较单体降低了5.56%,最大值较单体降低了7.76%;多体的纵摇幅值平均值较单体降低了3.03%,最大值较单体降低了48.82%;多体的最大锚链力平均值较单体降低了5.56%,最大值较单体降低了39.56%。
结合之前的结果,考虑风、浪、流耦合效应的极端海况模拟结果进一步表明,新型双模块半潜平台在纵荡和纵摇方向较常规单体半潜风机平台有着更好的稳定性,且可以在极端海况下减小锚链的受力。
5 典型海况下新型半潜平台风机拆除模拟
为了进一步验证该新型双模块半潜平台风机拆除的可行性,选取典型不规则波海况(Hs=2 m,Tp=5 s,λ=3.3),对新型双模块半潜平台进行拆除过程的简化模拟,并获得其拆除过程中的主要动力响应特征。与整体安装法相近,风机的拆除将采用缆绳整体提拉拆除法,拆除船选择铁建风01[15]。将风机模块与半潜平台模块之间的夹紧装置断开,由于风机模块的重力与浮力自平衡的特性,利用缆绳和拆装船完成风机模块的整体提拉拆除操作(缆绳提升速度为0.05 m/s)。为了研究提拉拆除过程中风机塔筒与平台间的接触受力问题,在平台中心圆柱内壁设置了Fender装置(弹簧刚度为6×108N/m)缓冲接触约束力,波浪入射方向沿X轴正方向,风机模块的提升工作从200 s开始到850 s结束。图5~7分别为不规则波海况下两个模块主要参数对比曲线、缆绳受力曲线和X方向的Fender受力变化曲线。
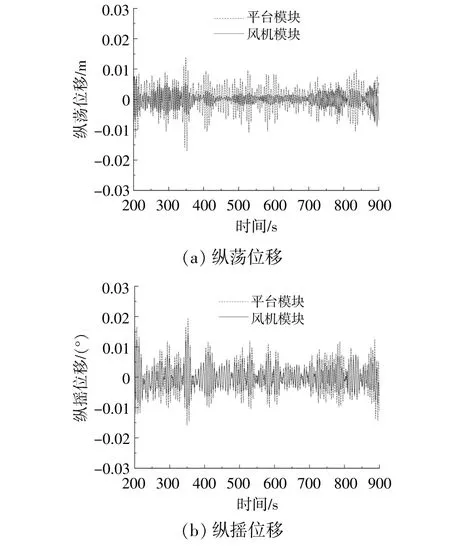
图5 不规则波海况两个模块主要参数对比Fig.5 Main parameters comparison of the two parts under irregular sea conditions

图6缆绳受力曲线Fig.6 The cable force

图7 X方向的Fender受力变化曲线Fig.7 Fender force in X direction
由图5~7可知:在该典型波浪海况下,平台和风机模块的动力响应平稳(主要纵荡和纵摇响应都较小),缆绳的总受力小于10 MN,即在拆除船的起吊范围内;X方向的Fender接触力小于1 MN,在Fender合理受力范围内。综上可知,新型双模块半潜平台的风机整体拆除是有可行性的。
该新型半潜式双模块风机集成结构在纵荡和纵摇上的优势提高了风机在运行状态下的稳定性,使得后期在平台模块上附加其他模块有了可能性。相较于传统单体结构,风机故障后平台与风机的同时退役,多体结构可单独替换风机模块的设计从全寿命周期上降低了总体成本。
6 结论
本文提出了一种新型半潜式双模块风力机集成结构,考虑风机模块与半潜风力机平台模块的多体动力耦合效应,重点对比研究了典型风浪联合作用下该新型半潜式模块化风力机集成结构与对应的常规整体半潜风机平台的主要动力响应特征,得到以下结论。
①通过对比典型规则波海况、额定风速运行海况和极端海况下该集成结构与对应单体半潜平台的主要动力响应特征,发现该新型双模块半潜平台在纵荡和纵摇方向较常规单体半潜风机平台有着更小的运动响应,极端海况下还会减少锚链的受力。
②通过初步研究典型不规则波海况下该集成结构在风机模块拆除过程中的主要动力响应特征,表明了双模块集成结构风机模块整体拆除具有可行性,多体结构可单独替换风机模块的设计,从全寿命周期上降低了总体成本。