AGV关键技术在航空制造车间的应用展望
2021-09-09吕玉江孟召军杨伟陈燕燕韩召谢明苛王延忠
吕玉江 孟召军 杨伟 陈燕燕 韩召 谢明苛 王延忠
摘要:随着智能制造和航空产品的发展,传统的航空产品制造技术已经不能满足航空产品日益发展的需求,随着智能制造技术的出现及发展,以智能物流为基础的智能制造车间逐渐得到了广泛应用。在智能制造车间物流中,自动引导小车(AGV)得到了广泛应用。本文在对AGV关键性技术研究进行綜述的基础上,总结了AGV在物料配送车间的工作流程,阐述了AGV在车间智能控制系统中的应用,提出了将AGV应用于航空制造车间智能物流的方法,并指出了AGV在航空制造车间的应用前景及其发展方向,对AGV的应用及发展具有一定的借鉴和参考意义。
关键词:智能制造;车间物流;路径规划;AGV;航空制造
中图分类号:V264.2文献标识码:ADOI:10.19452/j.issn1007-5453.2021.07.001
自动引导小车(AGV)是指能够按照规划的路径行驶的,具有移动、负载等功能的地面机器人。AGV有自动化程度高、灵活性强、安全性高等特点。在制造车间中,AGV可以与各类生产线、装配线、输送线站台、货架、作业点有机结合在一起,最大限度地缩短物料周转周期,提高生产系统的工作效率。由于其突出优势,AGV被广泛应用于制造车间物料配送中,解决制造车间存在的物料转运效率低、智能化程度不高等问题。
随着“智能制造”和航空产品的发展,航空制造车间由于物料种类多、数量大,并且配送效率低的因素,现有的制造技术已经不能满足航空产品发展的需求。因此,将以智能物流为基础的智能制造引入航空制造车间,对推动航空产品的发展具有重要意义。而AGV作为智能物流中最关键的角色,对其关键性技术进行研究,并将其应用于航空制造车间,对航空制造车间的发展有一定推动作用。
1航空制造车间存在的问题
航空作为军事力量的重要组成部分,对于国家和人民至关重要,经过几十年的发展,我国在航空领域已经取得了卓越成就。然而,制造技术的落后限制了航空产品的制造和进一步发展。随着智能制造的发展,智能制造在航空产品制造中的应用,受到了许多学者的关注[1]。
航空产品的制造过程主要为:零部件制造、定位、组件连接、机构装配及总体装配,最重要的装配过程是在装配线上进行的,虽然现有的固定工位式装配线、脉动式移动装配线、移动装配线可以在一定程度上提高装配效率,但是由于涉及的物料种类繁多、数量庞大,现有物流效率仍然不能满足进一步发展的民用航空制造需求,难以保证制造任务按计划完成,并且存在以下问题[2]。
(1)工位物料积压
航空产品由于装配要求高,作业周期较长,工作量大,各工位上一般会存放几个工作日的成品及所需物料,待一个工作周期结束后统一配送,因而,物料会停滞在存储区,造成生产线的物料堆积。
(2)生产线物料短缺
由于航空航天制造车间的物料配送由人工及可操纵的移动设备完成,人为的操作具有随机性,会导致生产线上的物料存储空间不足,出现配送拥堵,使得紧需物料无法及时进入存储区,导致物料短缺。
(3)配送灵活性差
航空产品的物料配送以“点对点”的方式实现,当出现物料缺少时,需要经过多次报备配送,物料才能到达工位,人为的参与就使得物料配送具有随机性和繁杂性,容易造成配送出错,影响装配效率。
针对航空产品的生产装配线存在的上述问题,航空产品制造车间企业需要车间进行自动化和智能化转型升级,并在此基础上研究车间智能物流配送技术,实现物料及时配送和高效生产。智能物流作为智能制造的重要环节,可以实现环境感知、决策判断和路径规划等功能,因此,将智能物流应用于以智能车间为载体的智能制造中,研究复杂环境的车间智能物流配送技术,能够最大程度地提升航空产品制造车间管理的准确性,根据指令互联互通协同作业,高效地完成搬运与输送任务。
AGV是一种能够在已知或未知地图中,根据上位机给定的路径信息和指令,完成物料运输任务的智能装备。在生产车间,AGV由于其灵活、智能化、柔性化等特点,成为车间物流中的重要组成部分,并得到广泛应用[3]。相对于传统的物流方式,采用AGV进行物料配送,在保证同等运输能力的条件下,可至少节约80%以上的劳动力,因此,通过在航空产品制造车间引入以AGV为主体的智能物流对物料的转运过程进行优化,可以提高物料的配送效率,降低生产成本,推动航空制造车间的进步,助力航空装备的发展。
在针对AGV的研究中,关键性的技术包括路径规划和任务调度两方面。本文在对AGV在路径规划和调度两方面进行综述的基础上,对AGV的研究现状进行总结,并对其在航空产品制造车间的应用进行展望。制造车间常见的AGV如图1所示。
2 AGV路径规划
AGV路径规划的目的是为AGV提供最优的行走路径,根据AGV所处的环境的不同可以分为已知环境下的全局路径规划和未知环境下的局部路径规划。根据此种分类方法,国内外学者对AGV路径规划的研究可分为全局路径规划算法和局部避障路径规划算法。
2.1全局路径规划
在全局路径规划算法方面,研究方法主要包括图论法、动态路径规划算法、状态空间法和智能算法等,本文主要对图论法和状态空间法进行介绍。
(1)图论法
将图论法应用在机器人路径规划中是一种新的数学方法,对求解机器人路径具有重要价值,图论法中,最常用的是Dijkstra算法,该方法的基本思想是从起点出发,逐步地向外探寻最短路。Dijkstra算法是一种贪心算法,通过一个数组记录起点到各个顶点的最短距离和已经确定最短路径的顶点集合,在路径规划开始时,将起点的路径权重设为0,对于起点能直接到达的点将其路径权重(长度)记录下来,对于不能直接到达的顶点,将路径长度设为极大。初始的顶点集合只有起点。然后,对周围顶点选择路径长度最短的一点,并将该点加入到集合中,然后确定新加入的顶点是否可以到达其他顶点,并对比该顶点到其他点的距离是否比起点到其他点的距离更短,如果是,就将其路径长度记录下来,并在记录下来的路径长度中选距离最小的顶点,将这一顶点设置为新的起点,重复以上操作,就可以求出最短路径[4-5]。Dijkstra由于采用贪心搜索策略,所以一定可以求解出最短路径,但是由于其搜索的点太多,在障碍物数量大的场合中,求解效率太低,为解决这一问题,赵东雄[6]通过将搜索区域限定在一定的长方形中来减少算法搜索的点,对提高路径规划效率有启发性的意义。
在图论法中,D*算法也是一种常见算法,该算法是Stentz[7]在1994和1995年两篇文章中提出的,由于D*算法是一种启发式的路径搜索算法,适合应用在未知环境或者动态变化场景中,因此适合于机器人探路场合,最早用于火星探测,如美国“索杰纳”火星车,通过利用该算法,完成了在火星复杂地形下的路径规划[8]。
(2)状态空间法
状态空间法是以状态和操作符为基础的问题表示和求解法,可以用来解决复杂环境中的路径规划问题[9]。利用这一方法的路径规划算法主要有全局择优搜索、A*算法、Tabu搜索法、模拟退火算法和爬山算法。
目前在路径规划中采用的最广泛的算法是A*算法,该算法是一种采用启发函数的优先级搜索算法,通过搜索、遍历节点,计算路径来求解最短路径,启发函数的作用是判断在遍历节点时先遍历哪些节点可以使路径最短,以提高搜索节点的效率。
A*算法是P.E.Hart,N.J.Nilsson和B.Raphael在1968年提出的,在静态环境中,A*算法能够针对两点之间的最优距离进行计算,但是在栅格化的地图中进行移动机器人路径规划时,由于复杂环境约束的存在,A*算法规划出的路径可能并不是最优,为了解决这一问题,王利敏[10]将A*算法引入到月球车路径规划中,证明A*算法在静态完全已知地图中能以极快的速度找到最短路径,并对A*算法进行了优化。创造性地将A*算法和B样条函数相结合,使得AGV可以在复杂地图中快速地搜索出最短路径。孙炜等[11]提出了一种改进的A*算法,采用栅格方法建立环境模型并针对A*算法规划的路径冗余点较多以及路径长度和转折角度较大的缺陷,将规划出的路径分割成较小步长,得到新的路径节点,最后,从起点开始依次用直线连接终点。结果表明,该算法能在复杂环境中,有效地减小路径长度和转折角度。王洪斌等[12]提出了一种改进的A*算法与动态窗口法相结合的混合算法,利用目标成本函数对所有目标进行优先级判定,进而利用改进的A*算法规划一条经过多个目标点的最优路径,同时采用自适应圆弧优化算法与加权障碍物步长调节算法。此外,提出将改进动态窗口算法与全局路径规划信息相结合的在线路径规划法,采用预瞄偏差角追踪法成功捕捉移动目标点,提升了路径规划效率,仿真实验表明该方法能够在复杂动态环境中更有效地实现路径规划。
2.2局部避障路径规划
在局部避障路径规划方面,研究应用较多的包括人工势场法和构建局部地图避障。本部分主要对两种研究方法进行介绍。
2.2.1人工势场法
人工势场法认为在环境中的机器人运动,是在引力和斥力和合力下引起的,其中引力是由目标点产生的,斥力是由障碍物产生的,通过控制引力和斥力,可以实现对机器人运动的控制的位置的计算。
1986年,Khatib[13]首先将人工势场算法引入到了机器人避障路径规划领域,人工势场路径规划技术由于原理简单,便于控制,在机器人的实时避障方面得到了广泛研究,但人工势场路径规划方法通常存在局部极小点,引力和斥力场设计时存在人为不确定因素,限制了人工势场法的应用,为了解决这些问题,朱毅等[14]设计了一种基于行为的局部极小点的解决方法,通过设计多种合理的转换条件,提高了机器人的决策能力,使机器人能根据场景采取合适行为,避免出现局部极小点。于振中等[15]引入了填平势场,并规定该势场只有当机器人处于局部极小点时才启用,用以解决局部极小点的缺陷。
尽管已经有不少针对人工势场法的改进方法,但到目前为止,动态环境中引力场与斥力场的设计、局部极小问题仍未得到完全解决,另外,由于人工势场法的原理,使其在在障碍物较多时,路径规划的计算量会很大,以上这些问题的存在,使得人工势场路径规划方法的应用受到了限制。
2.2.2构建局部地图避障
要构建地图进行避障,首先要进行的就是构建环境地图,在构建环境地图方面,常用的有两种方式,即基于机器视觉的地图构建和基于SLAM的地图构建。
(1)机器视觉
机器视觉可以看作是从图像中抽取、描述和解释信息,最终用于实际检测、测量和控制,其核心内容是图像的处理和识别。在对图像进行识别前,需要通过预处理对图像进行特征提取和增强,改善图像质量,便于计算机对图像进行分析处理。基于机器视觉的路径规划系统,首先通过视觉和图像处理的方式采集环境信息并进行处理和存储,然后,在运行过程中,对采集到的图像进行分析,采集AGV在行驶中的信息,最后完成AGV的局部路径规划。
国内高校中,吉林大学智能车辆课题组最先开始从事基于视觉导航方式AGV研究,采用射频识别(radio frequency identification,RFI)技术[16],先后开发了JUTW-1、JUTIV-2型视觉导航车,并开发出面向工厂实际应用的JUTIV-3通用型和装配型视觉导航AGV[17]。范莹莉[18]在采用单目摄像机机器视觉的AGV上,研究了基于图像序列的动态路径识别算法,对路径上的标识符和障碍物分别进行识别,实现了局部避障的功能。哈尔滨工业大学张明明[19]应用低成本视觉传感器,研究一种工厂三维环境的实时重建算法,并利用算法重建的三维环境地图,实现了光伏清洗机器人的路径规划。姚伟等[20]为满足AGV运动对于AGV视觉导航系统实时性和精确性的要求,设计了基于April Tag视觉基准的视觉定位系统,完成了对AGV工作场景标签信息的快速采集、标签识别及位置获取的图像处理算法设计以及基于多核通信的軟件系统设计,试验研究表明,该系统可满足AGV运动对避障系统的实时性、精确性要求。
(2)SLAM
同步定位与建图(simultaneous localization and mapping, SLAM)是指机器人在未知环境中移动时,一边移动,一边根据自身携带的传感器在对自身进行定位,同时利用外部传感器对采集的环境信息进行分析,构件环境地图。国内外高校、公司在SLAM建图避障方面进行了大量的研究,如Google公司研发的全自动驾驶汽车,搭载雷达、激光测距系统、视觉相机、GPS、轮毂传感器等设备,可以实时更新地图,引导汽车准确到达目的地,其原理图如图2所示。

美国Omron Adept公司推出了的一款自主导航的移动机器人平台Adept Lynx,该平台利用自身导航软件进行定位,并且无须安装磁条导轨、色带、信号反射器等外界辅助工具,可以根据自身传感器,结合现场环境自主探测周围环境,完成路径规划和避障[21],如图3所示。
D. V. Lu等学者研究了环境中行人的存在对路径规划的影响,将行人对路径规划的影响等效为高斯参数,则将行人对路径规划的影响转化为高斯参数对路径规划算法中各参数的影响,图4展示了在同一环境中,不同高斯参数对路径规划的影响[22]。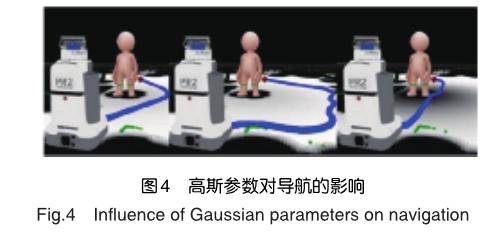
浙江大学奚婉对电力巡检机器人的导航系统进行了研究,搭建了软件系统,可以实现环境地图显示、路径规划、定位导航控制等功能,不仅可以创建全局地图,还可以求解最短路径,规划最优导航路线[23]。
哈尔滨工业大学的王超研究了一种室内机器人的导航算法,通过激光和视觉传感器进行环境和地图构建,如图5所示,最后通过试验对机器人的室内环境定位、动态环境导航算法进行了验證[24]。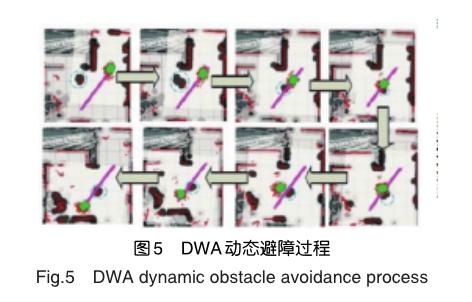
深圳乐行天下科技有限公司研发了一种用于机器人及其他设备的自主导航模块Navi Pack,可以对周围环境进行持续扫描,避开障碍物,选择安全路径,实现精确导航,如图6所示。
通过对国内外学者在车间物流AGV路径规划的研究总结后发现,AGV的物料配送路径规划是AGV在车间物流配送系统的基础,路径的基本流程为:上层系统生成配送任务信息,系统下发任务至待命点的AGV,AGV接收上层系统发送的物料配送信息后开始执行任务。当在路径中遇到冲突障碍时,进行判断,冲突解决后前往下一目标,直到到达任务目标点;若障碍无法避开,则重新生成配送任务信息;到达任务地点后卸下物料,判断是否需要充电,需要充电则进行充电,否则回到待命点。其工作流程图如图7所示。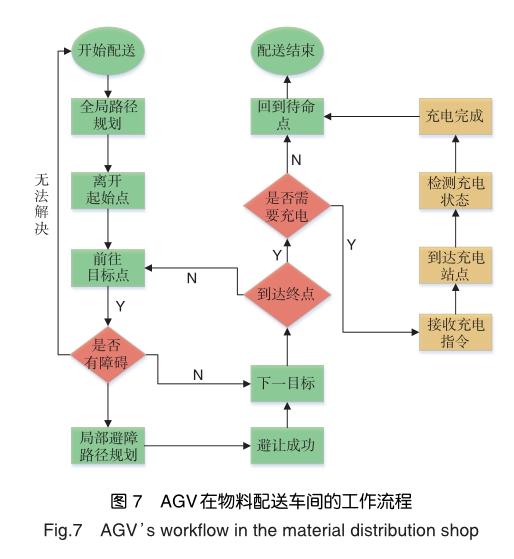
3 AGV调度
对于应用在车间中的AGV,已有的研究大多是针对单个AGV进行的[25-26]。然而,智能制造车间中会有大量的物料及物料配送任务,因此,单个AGV无法完成这些任务,通常需要多个AGV协同作业,智能制造车间中通常会利用AGV车群来完成运输任务。因此,近年来多个AGV的调度逐渐进入研究者们的视野,研究者们的研究主要集中在多AGV任务规划和多AGV任务调度两方面。多AGV任务规划的目的是完成多个AGV的路径规划,解决多个AGV之间的路径冲突问题。多AGV的任务调度的目的则是完成任务分配,给多个AGV分配运送任务,并确定起点和终点。
3.1 AGV任务规划
在对多AGV任务规划的研究方面,大多数研究的目标集中在解决AGV规划完成的任务之间的冲突和避让问题,目前已有的研究中,主要通过集中式和分布式两种方法来解决这一问题[27]。在集中式方法中,Peasgood[28],Clark[29]等使用带有特定拓扑的图来搜索路线图的最小生成树,Wang等[30]则将智能制造车间限制为网格世界,问题即转化为在网格世界中寻找不冲突的路径。集中式方法在多路径规划中具有完整性,这一理想特性在多AGV任务规划中非常难得,但这种方法对系统的计算能力有很高的要求[31]。为了提高路径规划效率,企业中一般采用计算效率较为理想的方式(分布式方法)来进行路径规划。例如,Ma等[32]使用了一种分布的多代理运动规划方法,这种方法使用一种算法来查找各个AGV的路径,但这个方法存在的最大问题就是不能处理出现冲突的场景。Erdmann等[33]通过提出优先级规划方法来解决这个问题,并且通过实践证明了这一方法的有效性,并广泛应用于多机器人的运动规划。但Dewangan等[34]指出,在实际应用中,由于环境的复杂性,优该算法可能使AGV发生路径冲突现象,为避免这种现象,Cap等[35]提出了一种改进的优先级规划方法,可应用在系统结构环境较好的工厂中。
对多AGV任务规划的研究除了解决AGV之间的避让问题外,还需要为每一个AGV从起始点到终点找到一条最优路径。目前国内外大多数研究者采用智能化程度更高、更复杂的算法来求解最优路径[36]。例如,Mousavi[37]采用了遗传算法求解AGV的最优路径;王辉等[38]采用了蚁群算法求解最优路径;智能算法具有较好的鲁棒性和随机搜索机制,但随着AGV数量以及配送任务的增加,传统智能算法已经不能解决遇到的问题,目前,更多的研究都集中在算法的改进策略上。例如,Zhang等[39]提出了一种改进的人工鱼群算法,并将其应用于机器人路径规划;Han等[40]研究了一种改进的多AGV路径规划遗传算法并进行了试验,结果表明,改进后的遗传算法缩短了AGV的行驶距离;针对移动机器人的路径规划,Li等[41]将路径规划问题转化为多目标优化问题,开发了一种新的自适应粒子群算法来提高路径搜索能力,并通过试验验证了算法的可行性和有效性。
综上所述,现有的研究在进行多AGV任务规划时,主要解决AGV之间的避让和多条AGV路径的规划这两个问题。研究者们通过集中式和分布式的方法解决AGV动态规划(AGV之间的避让)问题,其中分布式方法应用较为广泛,更加适用于航空制造车间的物料配送;同时,通过智能算法来解决多AGV路径规划(求解最优路径)问题,且多数研究者通过改进传统智能算法来提升算法的效率。
3.2 AGV任务调度
在实际应用中,AGV的任务规划只能解决从起始点到目标点的移动问题,AGV的任务调度技术则为每个AGV分配起始点和终点。AGV的任务调度要考虑到配送的成本和所需的时间,调度方案的优良与否,决定着制造车间的物料配送效率,对制造车间任务的完成时间具有决定性作用,因此,近年来许多学者在进行AGV任务调度的研究。
目前,国内外学者在AGV的任务调度领域已取得一定进展:李岩等[42]采用遗传算法同时调度机器和AGV,使AGV调度成为柔性制造系统集成调度的一部分,提出了一种新的群体控制策略并通过实例进行了验证。孙志峻等[43]提出了一种将遗传算法和分派规则相结合的调度算法。雷定猷等[44]提出了一种混合遗传算法。刘旭等[45]提出了一种改进的遗传算法进行AGV的任务分配和配送路径优化。近年来,对AGV的任务调度问题的研究领域主要集中在制造车间、装配车间和集装箱码头,大部分研究将任务完成时间最短设为优化目标,将模型理想化,并且局限于有轨AGV的任务配送系统,只是单纯解决了生产设备和AGV之间的调度问题[46]。
综上所述,现有的研究中,任务调度模型都是假设AGV按照固定的路线到达各个位置,但是这并不适用在制造车间环境中。在制造车间中,对于没有固定轨道的AGV,在避让障碍物时,行驶路线并不是固定的,并且,实际运行时,AGV并不能作为理想模型来考虑,AGV的电量、负载、充电时间等,都應该作为变量考虑进参考模型中。因此,在现有的研究中,对于AGV调度的理论研究与实际应用还存在一定差距,需要进一步完善。
根据对多AGV调度的国内外现有的研究现状可以看出,大多数学者是对AGV任务调度和任务规划分别进行研究,对两者的集成研究较少,这是由于两个问题本身都是难以解决的复杂问题,集成计算会使得问题解决的难度更大[47],但是在实际的制造车间中,这两者是分不开的。为了解决这一问题,Xidias等[48-50]在集成调度和路径规划方面做了一些相关的研究,将工厂地图等效成样条曲面[51],路径规划问题则转化为在地图上寻找满足约束条件的样条曲线的控制点,AGV的路径则等效为通过控制点来生成的样条曲线。在算法上,Xidias等将遗传算法的编码分为整数编码部分和浮点数编码部分,整数编码部分表示任务分配的站点,浮点数编码部分则是路径的控制点。通过这种方式将任务规划和任务调度有效的集成在一起,通过一个算法同时求解出AGV的路线和AGV的调度方案。
随着当前智能制造的发展,多AGV路径规划问题也逐渐变得复杂化,需要考虑的因素日趋多样化和随机化[52],当下,关于多AGV的理论研究多数从实际出发,并且逐渐得到了较成熟的应用并逐步完善,当然,在面对以智能制造为基础的“智能工厂”的趋势下,这些理论还有待进一步优化和提高。
4应用展望
航空制造车间由于涉及的物料种类繁多、数量庞大,在推进“智能制造”的过程中,车间配送系统由于其系统的复杂性,任务调度存在及时性、计算的复杂性和多约束性、随机性、离散不确定性,会使得车间出现物料转运和配送存在效率低、配送时间长、工作量大、成本高等缺点。近年来,由于AGV具有可靠性好、运输效率高、全自动运行、对物料适应性好、人力成本低、与其他信息化系统接口方便等优势,基于AGV的智能调度控制系统逐渐在航空制造车间和与航空制造车间存在类似问题的装配车间中得到应用。
在基于AGV的装配车间智能调度系统搭建方面,杨耀勇等[53]在总装车间搭建了全自动化的物料配送系统,包括上位控制系统及AGV自身的控制系统,该系统可以实现对物料的精准配送,实现效率、质量、成本的最优化。周鹏飞等[54]在总装车间搭建了AGV智能控制系统,使得总装车间的物料可以实现柔性化供应,降低了生产成本,从而提高了生产效率。
在基于AGV的智能物流系统生产调度与路径规划方面,孙晓顺[55]提出了基于MAS的多AGV任务调度方法和改进A*算法,并将上述方法集成应用到大型生产车间的AGV调度系统的开发中,大大提升了车间物流的自动化水平,从而提高了生产效率。李狮伟[56]结合生产过程中的工艺,对多种路径规划方法和调度方法进行了对比分析,提出了一种AGV动态调度与路径规划的方法。郭亚铭[57]开发了一种AGV路径规划的系统,该系统可以对柔性制造车间的AGV进行路径规划、监控和管理,并且可以将系统在运行中出现的故障及时解决。张辉等[58]针对飞机柔性装配生产线需求,搭建了一个以两台AGV运输车为基础的运输系统并得到了现场应用的验证。蒋倩等[59]在全三维飞机装配虚拟环境中,完成了AGV在飞机装配作业中的路径规划,并消除了AGV在路径中的碰撞干涉,对基于IGPS导航的AGV路径规划有一定的参考意义。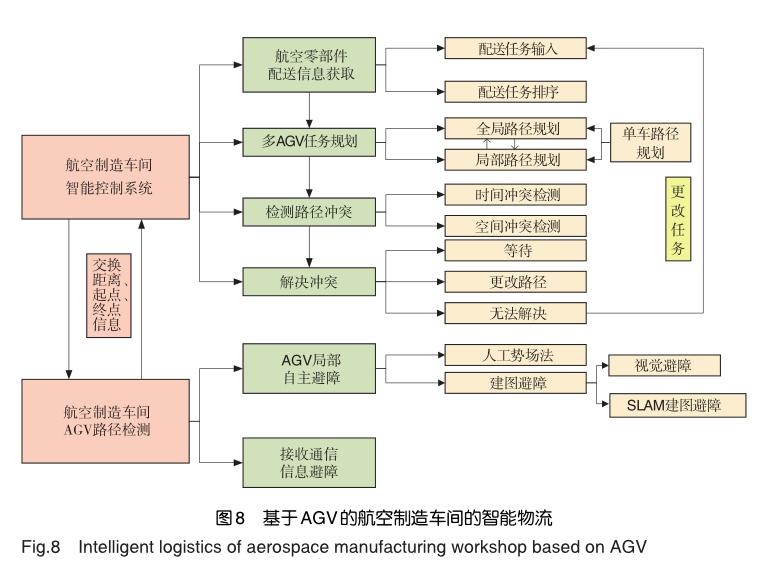
综上所述,由于航空制造车间、装配车间、物流车间所面临的物料配送问题与普通大型产品的制造、装配、物流车间存在极高的相似性,许多学者在逐渐完善的AGV关键性技术研究的基础上,将AGV逐渐应用于航空制造车间,并得到了实践的证明,但是现有的技术仍然不够成熟,在航空制造车间的应用仍处于起步阶段,因此,通过对已有的AGV关键性技术研究进行总结、分析后,将这些技术进一步完善并应用于航空制造车间中,推动AGV关键性技术在航空制造车间的应用,具体实现框图如图8所示。
基于AGV的航空制造车间的智能物流系统采用分布式系统,主要解决的是在物料配送中存在的信息共享、任务分配以及冲突解除等问题[60]。系统分为上层控制系统及下层检测系统,上下层系统之间进行AGV的行驶距离、起点、终点等关键信息的交换;上层控制系统负责给执行任务的AGV发送信息,主要完成包括配送任务信息获取、多AGV初始路径规划、检测多条路径之间的冲突以及解决出现的路径冲突4项任务;下层检测系统负责实现AGV的避障,主要包括局部自主避障及通过与上层的信息交换实现的通信信息避障。
5结束语
AGV作为自动化的搬运设备,应用在中车间中可以大量减少人工劳动,提升车间的工作效率,在很多传统行业里,难以实现的任务,它都能高效快捷的完成。
由于航空制造车间需要大量的劳动力资源,将基于AGV的智能物流系统全面引进航空制造车间中,可以实现自动取存物料,准时配送物料,提升物料配送效率,解决传统航空制造车间存在的问题,助力航空装备的发展。
本文通过对AGV全局路径规划、局部避障路径规划、AGV任务规划、调度的研究进行研究、总结的基础上,提出了将AGV应用于航空制造车间的实现途径。由于航空制造车间的特殊性,未来应用在航空制造车间的AGV将具备以下三个特点:(1)应用在航空制造车间的AGV需要具备高精度的特点;(2)应用在航空制造车间的AGV需要具备高可靠性的特点;(3)应用在航空制造车间的AGV具备信息化和智能控制化的特点。
航空产品制造装配环节需要大量的劳动力资源,在未来,航空制造车间将全面引进配备AGV,实现车间自动化作业,自动取存货物,大大缩短物料配送时间,从而降低航空产品的制造成本。
参考文献
[1]魏佳新.大数据技术在飞机制造中的应用[J].科技风, 2018(1):130. Wei Jiaxin. Application of big data technology in aircraft manufacturing[J]. Technology Wind, 2018(1):130. (in Chinese)
[2]沈梦超.飞机总装生产线物料精准配送技术研究[D].成都:西南交通大学, 2019.Shen Mengchao. Research on material precise distribution technology in aircraft final assembly line [D]. Chengdu: Southwest Jiaotong University, 2019. (in Chinese)
[3]孙大涌.先进制造技术[M].北京:机械工业出版社, 2000. SunDayong. Advancedmanufacturingtechnology[M]. Beijing: China Machine Press, 2000. (in Chinese)
[4]张书勤.组态式FMS中央管理系统的开发研究[D].长春:吉林工业大学, 2000. Zhang Shuqin. Development and research of configuration fms central management system [D]. Changchun: Jilin University of Technology, 2000.(in Chinese)
[5]蔣长浩.图论及网络流[M].北京:中国林业出版社,2001. Jiang Changhao. Graph theory and network flow theory[M]. Beijing:China Forestry Publishing House, 2001.(in Chinese)
[6]赵东雄.多自动导引小车系统(AGVS)路径规划研究[D].武汉:湖北工业大学, 2014. Zhao Dongxiong. The research on path planning for multiautomatic guided vehicle system[D]. Wuhan: Hubei University of Technology, 2014.(in Chinese)
[7]Stentz A . Optimal and efficient path planning for partiallyknown environments[C]// Robotics and Automation,1994. Proceedings. 1994 IEEE International Conference on. IEEE,1994.
[8]汤天骄.基于DSTAR和神经网络的未知环境移动机器人路径规划方法[D].哈尔滨:哈尔滨工业大学, 2010. Tang Tianjiao. Path planning based on DSTAR and artifacial neural network for mobile robots in unknown environment[D]. Harbin: Harbin Institute of Technology, 2010.(in Chinese)
[9]王永庆.人工智能原理与方法[M].西安:西安交通大学出版社, 1996. Wang Yongqing. Principles and methods of artificial intelligence[M]. Xian:Xian Jiaotong University Press, 1996. (in Chinese)
[10]王利敏.基于A*算法和B样条函数的月球车路径规划研究[D].长春:吉林大学, 2016. Wang Limin. Path planning of lunar rover based on A star algorithm and B spline function [D]. Changchun: Jilin University, 2016.(in Chinese)
[11]孙炜,吕云峰,唐宏伟,等.基于一种改进A*算法的移动机器人路径规划[J].湖南大学学报(自然科学版),2017,44(4):94-101. Sun Wei, Lv Yunfeng, Tang Hongwei, et al. Mobile robots path planning based on an improved A* algorithm [J]. Journal of Hunan University (Natural Science), 2017, 44(4): 94-101. (in Chinese)
[12]王洪斌,尹鹏衡,郑维,等.基于改进的A*算法与动态窗口法的移动机器人路径规划[J].机器人,2020,42(3):346-353. Wang Hongbin, Yin Pengheng, Zheng Wei, et al. Mobile robot path planning based on improved A* algorithm and dynamic window method [J]. Robot, 2020,42(3):346-353.(in Chinese)
[13]Khatib O. Real-time obstacle avoidance for manipulators and mobile robots[J]. International Journal of Robotics Research,1986,5(1):90-98.
[14]朱毅,张涛,宋靖雁.未知环境下势场法路径规划的局部极小问题研究[J].自动化学报,2010,36(8):1122-1130. Zhu Yi, Zhang Tao, Song Jingyan. Study on the local minima problem of path planning using potential field method in unknown environments [J]. Acta Automatica Sinica, 2010, 36(8): 1122-1130.(in Chinese)
[15]于振中,闫继宏,赵杰,等.改进人工势场法的移动机器人路径规划[J].哈尔滨工业大学学报,2011,43(1):50-55. Yu Zhenzhong, Yan Jihong, Zhao Jie, et al. Mobile robot path planning based on improved artificial potential field method[J]. Journal of Harbin Institute of Technology,2011,43(1):50-55.(in Chinese)
[16]张慧岳,曾佳,刘云波.基于RFID自动识别技术在航空工业中的应用研究[J].航空科学技术,2019,30(3):41-48. Zhang Huiyue, Zeng Jia, Liu Yunbo. Research of automatic identification technology based on RFID in aviation industry[J]. Aeronautical Science & Technology, 2019, 30(3): 41-48.(in Chinese)
[17]酈光府.基于RFID的AGV视觉导引系统研究[D].杭州:浙江大学,2008. Li Guangfu. Research of AGV visual navitation system based on RFID [D]. Hangzhou: Zhejiang University,2008.(in Chinese)
[18]范莹莉.基于机器视觉的AGV动态路径识别算法研究[D].兰州:兰州交通大学,2011. Fan Yingli. Study on the recognition algorithm of AGV dynamic path based on machine vision[D]. Lanzhou: Lanzhou Jiaotong University, 2011.(in Chinese)
[19]张明明.基于Kinect2的光伏清洗机器人实时环境重建与自主导航技术研究[D].哈尔滨:哈尔滨工业大学,2016.Zhang Mingming. Research on simutaneous mapping and automated navigation for photovoltaic cleaning robot with Kinect2[D]. Harbin: Harbin Institute of Technology, 2016.(in Chinese)
[20]姚伟,徐骏善,汪惠芬.基于视觉导航AGV的视觉定位系统设计[J].制造业自动化,2020, 42(11):18-22. Yao Wei, Xu Junshan, Wang Huifen. Designed of visual positioning system based on visual navigation AGV [J]. ManufacturingAutomation, 2020, 42(11): 18-22.(in Chinese)
[21]Bloss R. Ease of programming and sophisticated sensors see robots advancing intransport logistics,palletizing,order picking and assembly[J]. Industrial Robot,2013,40(5):420-424.
[22]Lu D V,Allan D B,Smart W D. Tuning cost functions for social navigation[M]. Social Robotics Springer International Publishing,2013.
[23]奚婉.基于激光扫描的电力巡检机器人导航系统研制[D].杭州:浙江大学, 2017. Xi Wan. Development of navigation system for inspection robot based on laser scanning[D]. Hangzhou: Zhejiang University, 2017.(in Chinese)
[24]王超.室內全向移动机器人系统设计及导航方法研究[D].哈尔滨:哈尔滨工业大学, 2017. Wang Chao. Research on design and navigation method of an indoor wheeled mobile robot [D]. Harbin: Harbin Institute of Technology, 2017.(in Chinese)
[25]黄辰,费继友,刘洋,等.基于动态反馈A*蚁群算法的平滑路径规划方法[J].农业机械学报, 2017, 48(4): 34-40. Huang Chen, Fei Jiyou, Liu Yang, et al. Smooth path planning method based on dynamic feedback A* ant colony algorithm[J]. Transactions of the Chinese Society of Agricultural Machinery, 2017, 48(4): 34-40.(in Chinese)
[26]Li G,Liu Q,Yang Y,et al. An improved differential evolution based artificial fish swarm algorithm and its application to AGV path planning problems[C]// Chinese Control Conference,2017:2556-2561.
[27]Li B,Liu H,Xiao D,et al. Centralized and optimal motion planning for large-scale AGV systems:A generic approach[Z]. Advances in Engineering Software,2017.
[28]Peasgood M,Clark C,McPhee J. A complete and scalable strategy for coordinating multiple robots within roadmaps[J]. IEEE Transactions on Robotics,2008,24(2):282-292.
[29]Clark C M. Probabilistic road map sampling strategies for multi-robot motion planning[J]. Robotics and Autonomous Systems,2005,53(3-4):244-264.
[30]Wang K H C,Botea A. Tractable multi-agent path planning on grid maps[J]. International Joint Conference on Artificial Intelligence IJCAI-09,2009.
[31]Draganjac I,Mikli?D,Kova?i?Z,et al. Decentralized Control of Multi-AGV Systems in Autonomous Warehousing Applications[J]. IEEE Transactions on Automation Science & Engineering,2016,13(4):1433-1447.
[32]Ma X,Jiao Z,Wang Z,et al. Decentralized prioritized motion planning for multiple autonomous UAVs in 3D polygonal obstacleenvironments[C]//InternationalConferenceon UnmannedAircraft Systems(ICUAS),2016:292-300.
[33]Erdmann M,Lozano-Pèrez T. On multiple moving objects[J]. Algorithmica,1987(2):1419-1424.
[34]Dewangan R K,Shukla A,Godfrey W W. Survey on prioritized multirobotpathplanning[C]//2017IEEEInternational Conference on Smart Technologies and Management for Computing,Communication,Controls,Energy and Materials(ICSTM),Chennai,2017:423-428.
[35]?áp M,Novák P,Kleiner A,et al. Prioritized planning algorithms for trajectory coordination of multiple mobile robots[J]. IEEE Transactions on Automation Science & Engineering,2015,12(3):835-849.
[36]Pandey A. Mobile robot navigation and obstacle avoidance techniques:A review[J]. International Journal of Robotics & Automation,2017,2(3):1-12.
[37]Mousavi M Y,Musa S N,Tahriri F,et al. Multi-objective AGV scheduling in an FMS using a hybrid of genetic algorithm and particle swarm optimization[J]. Plos One,2017,12(3):e0169817.
[38]王辉,王景良,朱龙彪,等.基于改进蚁群算法的泊车系统路径规划[J].控制工程, 2018, 25(2): 253-258. Wang Hui, Wang Jingliang, Zhu Longbiao, et al. Path planning of parking system based on improved ant colony algorithm[J]. Control Engineering of China,2018, 25(2):253-258.(in Chinese)
[39]Yi Zhang,Guolun Guan,Xingchen Pu. The robot path planning based on improved artificial fish swarm algorithm[J]. Mathematical Problems in Engineering,2016(9):1-11.
[40]Han Z,Wang D,Feng L,et al. Multi-AGV path planning with double-path constraints by using an improved genetic algorithm[J]. Plos One,2017,12(7):e0181747.
[41]Li G,Chou W. Path planning for mobile robot using selfadaptive learning particle swarm optimization[J]. Science China Information Sciences,2018,61(5):052204.
[42]李岩,吴智铭,甘泉.柔性加工环境中机器和AGV的集成调度[J].中国机械工程, 2001, 12(4): 447-450. Li Yan, Wu Zhiming, Gan Quan. Integrated scheduling of machines and AGVs in flexible manufacturing environment[J]. China Mechanical Engineering,2001,12(4):447-450.(in Chinese)
[43]孙志峻,朱剑英.基于遗传算法的多资源作业车间智能动态优化调度[J].机械工程学报, 2002, 38(4): 120-125. Sun Zhijun, Zhu Jianying. Genetic algorithm based for intelligentschedulingoptimizationofmulti-resource[J]. Journal of Mechanical Engineering, 2002, 38(4): 120-125.(in Chinese)
[44]雷定猷,张兰. AGV系统的调度优化模型[J].科学技术与工程, 2008, 8(1): 66-69. Lei Dingyou, Zhang Lan. Dispatch optimization modeling of automatic guided vehicle system [J]. Science Technology and Engineering, 2008, 8(1): 66-69.(in Chinese)
[45]劉旭,楼佩煌,钱晓明,等.基于改进遗传算法的物料配送多AGV调度优化[J].机械设计与制造工程, 2015(3): 16-21. Liu Xu, Lou Peihuang, Qian Xiaoming, et al. Scheduling of automated guided vehicles for material distribution based on improvedgeneticalgorithm[J].MachineDesignand Manufacturing Engineering, 2015(3): 16-21.(in Chinese)
[46]Kaoud E,El-Sharief M A,El-Sebaie M G. Scheduling problems of automated guided vehicles in job shop,flow shop,and container terminals[C]// 2017 4th International ConferenceonIndustrialEngineeringandApplications(ICIEA). IEEE,2017.
[47]Vis I F A. Survey of research in the design and control of automated guided vehicle systems[J]. European Journal of Operational Research,2006,170(3):677-709.
[48]Xidias E K,Azariadis P N,Aspragathos N A. Path planning of holonomic and non-holonomic robots using bump-surfaces[J]. Computer-Aided Design and Applications,2008,5(1-4):497-507.
[49]Xidias E K,Azariadis P N. Mission design for a group of autonomous guided vehicles[J]. Robotics & Autonomous Systems,2011,59(1):34-43.
[50]Xidias E,Zacharia P,Nearchou A. Path planning and scheduling for a fleet of autonomous vehicles[J]. Robotica,2016,34(10):2257-2273.
[51]Azariadis P N,Aspragathos N A. Obstacle representation by Bump-surfaces for optimal motion-planning[J]. Robotics & Autonomous Systems,2005,51(2):129-150.
[52]干一宏.面向航天制造企业的车间作业调度与指导技术研究[D].南京:南京理工大学, 2015. Gan Yihong. Research on job shop scheduling and guidance technologyforaerospacemanufacturingenterprises[D]. Nanjing: Nanjing University of Science and Technology, 2015.(in Chinese)
[53]杨耀勇,李华峰,延玉军,等.汽车总装车间智能物流输送技术研究[J].汽车工艺与材料,2020(10):7-12. Yang Yaoyong, Li Huafeng, Yan Yujun, et al. Research on intelligent logistics transportation technology in automobile assembly workshop[J]. Automobile Technology & Material, 2020(10):7-12.(in Chinese)
[54]周鹏飞,潘志友,魏磊. AGV调度控制系统在汽车总装车间的应用[J].物流技术, 2020,39(9):143-147. Zhou Pengfei, Pan Zhiyou, Wei Lei. Application of AGV dispatch control system in automobile assembly workshop [J]. Logistics Technology, 2020,39(9):143-147.(in Chinese)
[55]孙晓顺.大型生产车间中AGV调度方法研究[D].武汉:华中科技大学, 2019. Sun Xiaoshun. Research on AGV scheduling method in largescale production workshop [D]. Wuhan: Huazhong University of Science and Technology, 2019.(in Chinese)
[56]李狮伟.船用汽轮机智能车间AGV动态调度与路径规划研究[D].哈尔滨:哈尔滨工业大学, 2020. Li Shiwei. Research on AGV dynamic scheduling and path planning of marine steam turbine intelligent workshop [D]. Harbin: Harbin Institute of Technology, 2020.(in Chinese)
[57]郭亚铭.面向柔性制造车间环境的AGV路径规划研究[D].鄭州:河南工业大学, 2020.Guo Yaming. Research on AGV route planning in flexible manufacturing workshop environment [D]. Zhengzhou: Henan University of Technology, 2020.(in Chinese)
[58]张辉,周丽,郭洪杰,等.面向飞机柔性装配线的联动AGV研制[J].航空制造技术, 2013(20):67-69. Zhang Hui, Zhou Li, Guo Hongjie, et al. Development of AGV linkage for flexible assembly line of aircraft [J]. Aeronautical Manufacturing Technology, 2013(20):67-69.(in Chinese)
[59]蒋倩,张云志,张少擎,等.飞机数字化装配中IGPS导航的AGV路径规划方法[J].航空制造技术,2016(22):72-77+83. Jiang Qian, Zhang Yunzhi, Zhang Shaoqing,et al. Path planning method of the AGV navigated by IGPS in aircraft digital assembly [J]. Aeronautical Manufacturing Technology, 2016(22): 72-77+83.(in Chinese)
[60]杨春宁,杜黎明,李春.未知区域无人机协同搜索方法及效率分析[J].航空科学技术, 2019, 30(10):56-63. Yang Chunning, Du Liming, Li Chun. Methods and efficiency comparison of UAV swarms collaborative search in unknown area[J]. Aeronautical Science & Technology, 2019, 30 (10): 56-63.(in Chinese)
Application Prospect of AGV Key Technology in Aeronautical Manufacturing Workshop
Lv Yujiang1,Meng Zhaojun2,Yang Wei3,Chen Yanyan1,Han Zhao2,Xie Mingke3,Wang Yanzhong2,3
1. AVIC Beijing Changcheng Aeronautical Measurement and Control Technology Research Institute,Beijing 101111,China 2. Liaoning Institute of Science and Technology,Benxi 117000,China 3. Beijing University of Aeronautics and Astronautics,Beijing 100191,China
Abstract: With the development of intelligent manufacturing and aerospace products, the traditional aviation manufacturing technology already cannot satisfy the needs of the development of the aviation products. Along with the appearance and development of intelligent manufacturing technology, intelligent logistics based intelligent manufacturing plant has been widely employed. In intelligent manufacturing workshop logistics. Automated Guided Vehicle(AGV) has been widely used.Based on AGV key technology research, this paper summarizes the AGV in the working process of the material supply workshop, expounds its application in the workshop of intelligent control system, and puts forward a method that applies the AGV to the intelligent logistics as well as its prospect and development direction in aviation manufacturing plant, which has references to the AGV development.
Key Words: intelligent manufacturing; workshop logistics; path planning; AGV; aviation manufacturing
