基于D-S证据理论的空中目标敌我识别研究综述
2021-08-23陈致远沈堤余付平陈宏阳赵凯
陈致远 沈堤 余付平 陈宏阳 赵凯


摘 要: D-S证据理论作为一种不确定性推理工具,能够充分发挥多源信息融合的优势,提高空中目标敌我识别结果的准确性。本文从空中目标敌我识别的实际应用出发,介绍了D-S证据理论的基本原理,梳理了空中目标敌我识别中需要解决的关键问题, 然后从空中目标敌我识别的识别方法和信息融合两个方面,对现有研究方法进行了归纳与分类,并简要总结了每种方法的优势、适用范围、使用价值等。最后在现有研究基础上提出了一种新的空中目标敌我识别方法,并对D-S证据在空中目标敌我识别中的应用进行了展望。
关键词:D-S证据理论;空中目标;敌我识别;识别方法;信息融合
中图分类号:TN97; V21 文献标识码: A 文章编号:1673-5048(2021)03-0038-13
0 引 言
敌我识别是指通过各种技术和手段对目标的敌我属性进行识别的过程[1]。空中作战是联合作战的重要组成部分,对联合作战的胜利起着十分重要的作用。因此,准确高效的空中目标敌我识别是防止误击误伤,提高作战效能,顺利实施空中作战的先决条件。随着各种现代高新技术的应用,武器装备的生存能力和隐身能力得到了极大的提升,特别是电磁干扰能力的发展,使得空战环境异常复杂,对空中目标敌我识别能力的精确性和可靠性提出了严峻挑战。
近年来,国内外针对空中目标敌我识别问题进行了大量的研究[2-4]。目前主要采用多源信息融合的方式进行空中目标敌我识别[5-7],这种方式能够克服单一传感器在识别精确性、可靠性、完整性等方面的缺陷,同时又能够适应复杂的空战环境,因此在空中目标敌我识别领域得到了广泛的应用。多源信息融合算法从概念上分为物理模型类、基于参数类、基于认识模型类等 [8],其中用于目标识别的算法有贝叶斯推理、D-S证据理论、神经网络、聚类算法、模糊集理论等。
由于不同空中目标身份信息的差异性和敌我识别系统中固有的缺陷,以及环境、人为因素和其他因素的影响,导致在信息融合时会产生大量的不确定性信息,影响识别结果的准确性。D-S证据理论不仅能够有效处理单类识别信息处理中的不确定性问题,还能处理多传感器信息融合识别过程中的不确定性问题,从而获得更加准确的识别结果。相对于其他算法,D-S证据理论在空中目标敌我识别中得到了更广泛的应用。
针对基于D-S证据理论的空中目标敌我识别研究方法综述相对较少的情况,本文结合近些年相关研究文献,从实际应用的角度出发,对这些研究进行了梳理、分析和总结,并在此基础上提出了一种新的空中目标敌我识别方法。
1 基础理论
1.1 D-S证据理论
D-S证据理论是由Dempster创立[9],经Shafter拓展完善而形成的一种理论[10]。其能够针对所考察的不确定性问题的基本事件幂集空间,确定相应的基本概率赋值,使用证据组合规则进行融合,从而得到不确定性问题的解。D-S证据理论可以用比较符合人的逻辑思维的方式处理不确定性问题[11],能够明确描述“不知道”和“不确定”等概念,不需要先验概率就可以对证据进行融合。
定义1:设空中目标敌我识别过程中所有可能的识别结果构成的有限完备集合Θ={θ1, θ2, …, θn}为辨识框架,其中辨识框架Θ中的各个元素两两互斥。根据指挥决策的需要和各种手段获取的情报,在空中目标敌我识别过程中,辨识框架Θ主要体现为集合{敌军,我军}[12],其幂集2Θ为集合{,敌军,我军,敌军∪我军},其中元素“”和“敌军∪我军”统称为属性不明目标。
定义2:设A为辨识框架Θ的任意子集,2Θ为辨识框架Θ的幂集,若有映射m: 2Θ→[0, 1]满足如下条件:
m()=0∑AΘm(A)=1 (1)
则称m为基本概率赋值函数,m(A)为A的基本概率赋值(Basic Probability Assignment,BPA)。若m(A)>0,则称A为m的焦元,焦元Ai(i=1, 2, …, n)为空中目标的某一身份信息,基本概率赋值为该身份信息的可信度。
定义3:设m1和m2为辨识框架Θ下相互独立的基本概率赋值函数,焦元分别为B1, B2, …, Bn和C1, C2, …, Cn,则D-S组合规则为
m()=0m(A)=11-k∑Bi∩Cj=Am1(Bi)m2(Cj) (2)
式中:m是m1和m2融合后的新证据;k为冲突系數,k=∑Bi∩Cj=m1(Bi)m2(Cj),用于衡量证据之间的冲突程度。在空中目标敌我识别中,m1和m2分别表示两个即将进行信息融合的传感器所构成的证据。
定义4:设A为辨识框架Θ的任意子集,m为基本概率赋值函数。若函数Bel满足映射Bel: 2Θ→[0, 1],且满足Bel(A)=∑BAm(B),则称函数Bel为信任函数,Bel(A)表示对空中目标的身份信息A为真的信任程度。若函数Pl满足映射Pl: 2Θ→[0, 1],且满足Pl(A)=1-Bel(),则称函数Pl为似真函数。其中,Bel()表示对空中目标的身份信息A为假的信任程度,则Pl(A)表示对空中目标的身份信息A为非假的信任程度。
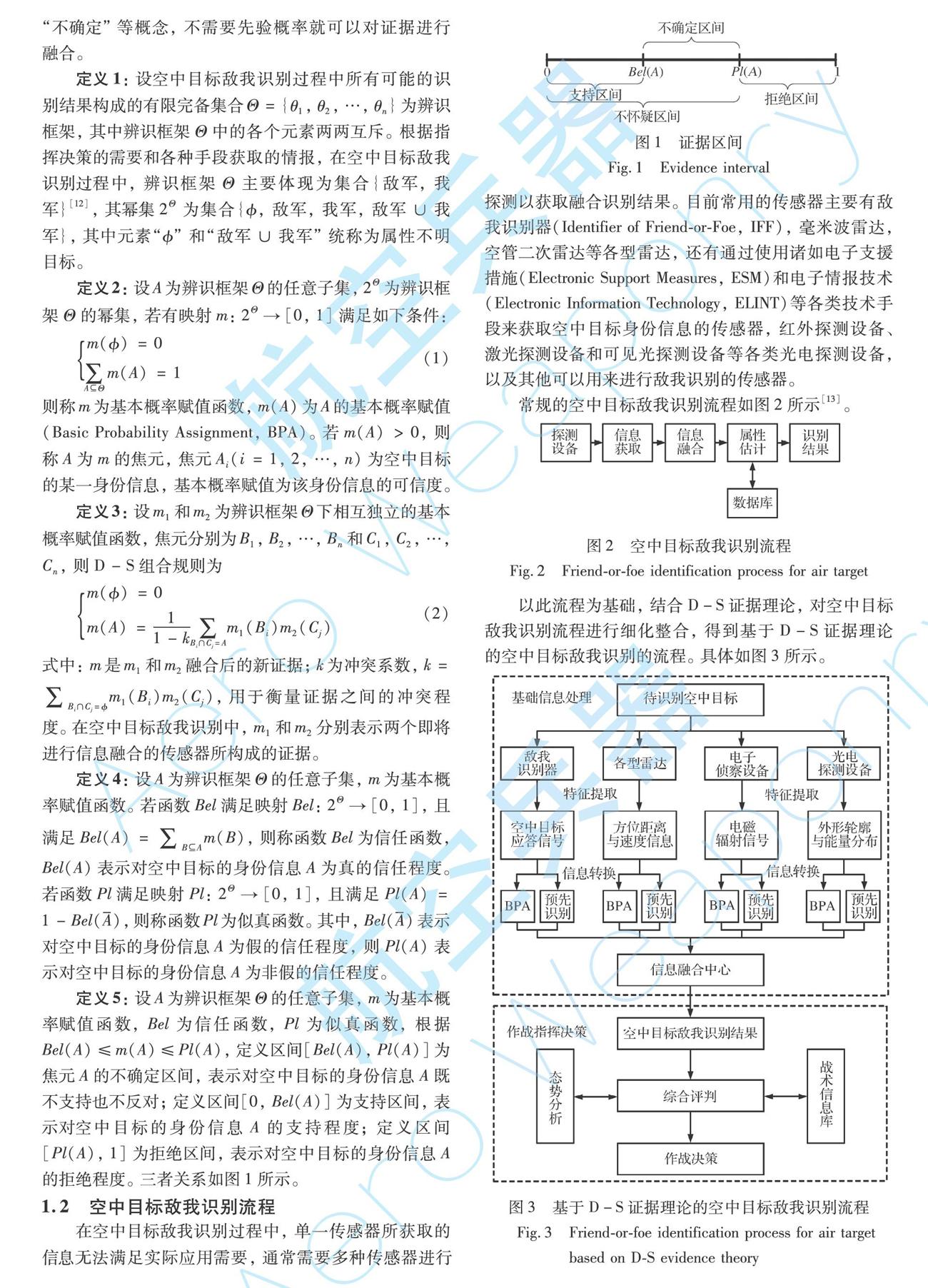
定义5: 设A为辨识框架Θ的任意子集,m为基本概率赋值函数,Bel为信任函数,Pl为似真函数,根据Bel(A)≤m(A)≤Pl(A),定义区间[Bel(A), Pl(A)]为焦元A的不确定区间,表示对空中目标的身份信息A既不支持也不反对;定义区间[0, Bel(A)]为支持区间,表示对空中目标的身份信息A的支持程度;定义区间[Pl(A), 1]为拒绝区间,表示对空中目标的身份信息A的拒绝程度。三者关系如图1所示。
1.2 空中目标敌我识别流程
在空中目标敌我识别过程中,单一传感器所获取的信息无法满足实际应用需要,通常需要多种传感器进行探测以获取融合识别结果。目前常用的传感器主要有敌我识别器(Identifier of Friend-or-Foe,IFF),毫米波雷达,空管二次雷达等各型雷达,还有通过使用诸如电子支援措施(Electronic Support Measures,ESM)和电子情报技术(Electronic Information Technology,ELINT)等各类技术手段来获取空中目标身份信息的传感器,红外探测设备、激光探测设备和可见光探测设备等各类光电探测设备,以及其他可以用来进行敌我识别的传感器。
常规的空中目标敌我识别流程如图2所示[13]。
以此流程为基础,结合D-S证据理论,对空中目标敌我识别流程进行细化整合,得到基于D-S证据理论的空中目标敌我识别的流程。具体如图3所示。
由图3可知,基于D-S证据理论的空中目标敌我识别流程主要分为两个阶段:基础信息处理阶段与作战指挥决策阶段。在基础信息处理阶段,首先由各类传感器对空中目标进行特征提取,获得相应的身份特征信息。如果需要进行集中式融合,那么使用特定的方法将空中目标的身份特征信息转化为D-S证据理论中的BPA。然后,通过D-S组合规则进行融合处理,得到一个具有明确敌我属性的融合识别结果。如果需要进行分布式融合,首先由各传感器对敌我属性进行预先处理,然后将各自的处理结果进行融合,以获取最终的识别结果。在实际应用中应根据需要合理选择融合方式。在作战指挥决策阶段,需要对基础信息处理阶段的融合识别结果进行综合评判,整合目标态势信息与战术信息库的信息,形成最终决策意见,为指挥官整体决策提供一个合理的参考。
上述识别流程中,敌我识别器主要通过协作式的询问与应答来获取空中目标的属性信息;各型雷达主要通过非协作的方式来获取空中目标的方位、距离与速度等物理信息;电子侦察设备主要通过搜索、截获、定位、识别与分析敌方电子设备辐射的电磁能量来获取空中目标的辐射特征;光电探测设备主要通过将光信号转换为电信号来获取空中目标的可视化轮廓信息与能量分布信息等。由于各类传感器的工作原理和运行机制不同,其获取信息的内容和形式也各不相同,既有定量、定性的数据,也有宽泛、宏观的信息,没有统一的规范和标准,难以完成融合识别。而D-S证据理论可以将这些信息转化为形式统一的BPA,经D-S组合规则融合处理后能得到直接简明的识别结果,更适用于空中目标敌我属性明确后的指挥决策。
1.3 空中目标敌我识别的关键问题
1.3.1 识别方法问题
空中目标敌我识别中的问题主要是指为达成识别目的,应使用什么样的方法和手段。可具体区分为传感器的部署问题和敌我识别准则建立问题。
一是传感器的部署问题。情报信息资源作为现代战争中催生战斗力的主导资源,是开展作战行动和制定作战决策的基本依据,联合作战中的任何一个环节都离不开情报信息资源的支持。传感器是空中目标敌我识别过程中获取情报信息的重要途径和手段,目前可以用于敌我识别的传感器主要涵盖陆基、海基、空基、天基、电磁空间等五类平台,可以获取目标的物理特征、空间方位、电磁辐射、参数、图像等各种信息要素[14]。由于不同的传感器战场生存能力不同,实际应用中,为了适应复杂多变的战场环境,确保传感器最大程度发挥作战效能,通常会部署最适用于当前战场环境的传感器。必要时,除了部署技术型传感器外,还会部署诸如技术侦察、人工情报、开源情报等逻辑型传感器,以实现全面可靠的空中目标敌我识别任务。在基于D-S证据理论的空中目标敌我识别研究方法中,传感器的部署问题主要体现为相应研究背景下的空中目标敌我识别初始信息源的选择问题。
二是敌我识别准则的建立问题。空中目标敌我属性的识别是一个十分复杂的过程。从时序数据处理的角度分析:传感器直接获取的初始数据往往不具备明确的敌我属性。需要赋予其包含有敌我识别准则的功能模块,才能使其在此规则下完成对初始数据敌我属性的分析、处理与融合功能,实现由原始数据向定量定性信息的转换;从作战指挥决策的角度分析[15], 随着电子对抗技术和隐身技术的发展,常规雷达会受到严重干扰,无法进行有效识别。因此除了引入逻辑型传感器进行辅助识别外,还应把指挥官的判断力融入到空中目标敌我识别的各个环节中去,指挥官判断力发挥的关键在于其积累的丰富的敌我识别判别经验。这些经验来源于由战术信息库和军事专家经验所建立起的敌我识别准则。因此在实际应用中,应赋予传感器符合当前实际需求的敌我识别准则,使其获取的信息带有相应的战术特征,提高敌我识别的准确性。在基于D-S证据理论的空中目標敌我识别研究中,敌我识别准则的建立问题主要体现为相应的研究背景下,初始信息源应获取的数据种类,以及将该数据转化为属性信息时所选取的阈值和定性标准。
1.3.2 信息融合问题
空中目标敌我识别有效实施的基础在于实现各类传感器之间的信息融合。目前常用的融合方式有集中式融合、分布式融合、混合式融合等[16]。集中式融合的结果更加准确,但运算量较高,且任一传感器受到破坏,会对识别结果造成重大影响。分布式融合能够避免上述问题,具有较强的生存能力,但是信息利用率较低。混合式融合能够克服两者的缺点,但是其处理结构复杂,成本较高。因此应根据实际需要,选择合理的融合方式。但无论使用哪种融合方式,在基于D-S证据理论的空中目标敌我识别研究中,首先需要解决两个基本问题:一是BPA构造方法问题,二是冲突证据融合问题。在构造BPA时,应确保构造BPA的方法符合实际需求,可根据情况引入权重,确保合理发挥主要传感器的决定作用和辅助传感器的辅助作用。在进行冲突证据融合时,选用的融合方法应减少无效信息的干扰和有效信息的丢失。此外,解决以上两个基本问题选用的方法应符合决策逻辑,满足时效性、可靠性、连续性的基本要求,既能够实现对单个目标的识别与跟踪,又能够实现复杂态势下多目标的敌我识别。
2 基于识别方法的研究分类
合理的识别方法是实施空中目标敌我识别的有效途径和手段。在实际应用中,敌我识别准则的建立一方面取决于军事专家经验,另一方面取决于传感器的信息处理能力。因此,传感器的部署与敌我识别准则的建立是同步实施的。以技术型传感器及其配套的敌我识别准则为主的识别方法称为技术型识别方法;以逻辑型传感器及其配套的敌我识别准则为主的识别方法称为逻辑型识别方法。
2.1 基于技术型识别方法的研究分类
技术型识别方法探测的信息形式固定,相对客观,具有较快的识别速度和较高的可信度,是当前的研究热点。技术型识别方法通过各种协作式和非协作式传感器对空中目标进行探测。协作式传感器主要采用“询问/应答”的方式来获取信息,如敌我识别器等。非协作式传感器则直接获取相应信息。
谭源泉等[17]提出的空中目标敌我识别方法是在先验信息粗糙的情况下,选用协作式传感器来进行识别。将传感器提取的飞机编号、飞行员代号、航速、最小安全速度等四类要素作为基础信息,通过比对飞机编号与飞行员代号之间的对应关系、区分明确的目标属性速度区间来确定敌我识别准则,再使用模糊隶属度函数将相应的信息转化为BPA,最后采用一种基于权值修正的改进D-S融合方法[18]进行融合。试验结果表明,该方法可以较好地提高识别精确性。
Tan等[19]针对实际应用中IFF与雷达融合识别的问题,提出一种基于模糊神经网络与D-S证据理论相结合的空中目标敌我识别方法。该方法选用IFF与雷达作为传感器,探测目标的高度、速度、爬升情况,以及我方空域速度、IFF应答情况等要素,根据专家经验和计算能力,选取目标高度、速度范围来建立敌我识别准则。其采用模糊神经网络与概率因子、多级模糊综合评价与D-S理论相结合的混合算法,实现了从生成模糊数据库到最终识别的完整过程,可以自动识别敌我,减少了识别过程中不确定性的影响。
陈丽家[20]针对IFF的局限性,避免在受到干扰、欺骗后的误判,选用IFF与雷达等协作式和非协作式传感器进行空中目标敌我识别。其提取IFF应答信号、飞机活动区域、特定飞行区域、空中走廊和飞行计划等相关信息,通过划定敌军与友军的空域范围、飞行区域的高度和时间范围、空中走廊的相关航迹、飞行计划匹配程度等建立相应的敌我识别准则。然后使用模糊C均值聚类方法建立隶属度函数,进而获取BPA,最后使用Murphy方法[21]进行D-S融合以获取最终的识别结果。朱昕[22]在此基础上加入了飞行器型号识别准则、威胁性识别准则、战术特征准则等,对基于战术特征准则获取的信息使用带概率因子的模糊神经网络获取BPA,其他则使用隶属度函数,并选用Shafer折扣方法[10]对BPA进行修正,在最后进行D-S融合时,引入融合结果可信度的分析,使识别结果更加精确。
吴强等[23]在战斗机防空战斗巡逻的背景下展开相应研究。该研究选用机载雷达作为非协作式传感器来探测空中目标的速度、加速度、雷达反射面、高度等四类要素。在防空战斗巡逻中,我军原则上不会进入巡逻区域,因此所有进入或有进入意图的空中目标均可能为敌军,基于此建立以目标威胁特性为主的敌我识别准则。针对每个目标威胁特性构建中间型隶属度函数来构造BPA,然后得到某個时刻目标的具体种类,最后将每个时刻的识别结果进行融合以获取最终结果,保证了识别结果的连续性。
孙俊等[24]充分挖掘雷达的战术性能,从雷达宽窄带结合的角度展开空中目标敌我识别的研究。该研究通过雷达宽带识别系统获取高分辨一维距离像的频谱幅度以及目标的姿态角等较为精确的信息,结合雷达窄带识别系统获取目标高度、速度、航向等较为粗略的信息,实现宽窄带功能互补。通过建立隶属度函数,将探测到的信息转换为BPA,进行相应的D-S融合以获取最终结果。
徐浩等[25]考虑复杂环境下的传感器可信度具有一定差异的工程实际,结合使用敌我识别器、ESM、雷达、红外传感器等协作式和非协作式传感器,主要获取目标应答信号、辐射信号、位置与运动信息、轮廓等方面的信息。其利用传感器内置的敌我识别准则获得初步识别结果,再将对应的BPA转化为IFS决策问题,利用TOPSIS法确定各证据权重,然后对识别结果进行修正,以获取最终的识别结果。庞梦洋等[26]在此基础上,为进一步减少识别中的错判,提出了一种基于三支决策的空中目标敌我识别方法。该方法根据实际情况和专家经验,引入损失函数,确定阈值,制定三支决策规则,从而在徐浩方法的基础上区分属性不明目标,而后进行进一步的识别,最大程度地减少误判风险。
王成[27]为避免物理特征对空中目标信息描述不全的问题,提出了一个基于DsmT理论的空中目标识别方法。该方法使用技术型传感器获取空中目标的图像信息和物理特征信息,并进行DsmT融合,以获取更高的识别结果,但该方法在获取图像信息时容易受到干扰,会对识别结果造成不利影响。
综上,基于技术型识别方法的空中目标敌我识别研究领域十分广泛,但因其研究背景和侧重点的不同,导致其优势和局限各有不同。相对来说,协作式传感器使用较少,非协作式传感器使用较多。文献[17]采用的协作式传感器可以直接提取目标信息,不需要过多的加工,简单快捷,同时也考虑我军飞机受损情况下的识别方法。但是该方法只能用于识别我军和不明目标,实际应用价值有限;文献[19]通过智能算法实现自动识别敌我,但其对目标数据库具有一定的依赖性,对数据库中没有的目标识别效果较弱;文献[20,22]选用的方法充分发挥了雷达等非协作式传感器的作用,为空中目标敌我识别提供了一种参考思路,但其敌我识别准则范围较为宽泛,容易被敌军窃取利用,因此还有待改进;文献[23]提出的方法可以准确识别目标的种类,方便进行指挥决策,但是该方法只能用于识别敌军,无法识别我军和友军,应用范围有限,且只能识别数据库内已录入的目标类型,无法识别数据库外的目标;文献[24]提出的方法能够有效提高雷达传感器的识别性能,但是并未考虑雷达在受到电子压制时的情况;文献[25]考虑实际情况下各传感器作用发挥的不同,引入传感器可信度概念,更加贴近实际;文献[26]在文献[25]的基础上实现了对不明目标的进一步识别,为空中目标敌我识别提供了一种新的思路;文献[27]从目标图像信息角度入手,提出了新的识别方法,但未考虑图像信息易受干扰的情况。
2.2 基于逻辑型识别方法的研究分类
在现代战争中,为避免强电磁干扰下技术型识别方法不可靠的问题。需要根据作战实际引入逻辑型识别方法对技术型识别方法进行补充,以获取更为科学全面的识别结果。
李进军等[28]从编队防空作战的角度考虑,认为传统的技术型识别方法只能区分目标敌我属性而不能判断目标的威胁程度,无法满足防空作战指挥决策需要,因此选用了结合目标战术特征的逻辑型传感器进行空中目标敌我识别。该传感器通过探测目标的距离、速度、高度、加速度和回波等物理信息,并融入基于敌方战术行为建立的敌我识别准则,使上述物理信息具备了相应的战术特征,能够清晰地描述目标的威胁态势程度,从而方便指挥官进行决策。该方法根据空中目标区域属性定义,构建了BPA模型,并引入后验可信度进行融合。崇元等[29]在此基础上提出了一种基于融合战术与修正物理特征的空中目标敌我识别方法。该方法认为仅将战术特征赋予物理信息无法突出战术特征的作用,应使用战术特征对识别后的目标物理特征进行修正,避免目标物理特征上的欺骗和伪装。
综上,基于逻辑型识别方法的空中目标敌我识别研究内容相对比较匮乏,可供参考的文献相对较少。仅有的文献[28-29]也是从防空作战的角度出发,是在空中目标均可能为潜在敌军的前提下开展研究的,适用范围具有一定的局限性。
2.3 基于识别方法的研究分类总结
从空中目标敌我识别的识别方法这个角度出发,对技术型识别方法和逻辑型识别方法两个方面展开论述,将敌我识别能力、传感器的使用类型、作战适用范围、战术价值进行了归类总结。具体如表1所示。
由表1可知,不同的研究背景、不同的识别方法具有不同的优点和缺陷。目前国内外主要是从技术型识别方法的角度对空中目标敌我识别展开研究。因为技术型识别方法获取的信息相对比较客观、精度较高、信息处理速度较快,但是忽略了实际应用中强电磁干扰下技术型识别方法效果欠佳的客观实际。仅有的逻辑型识别方法也是站在编队防空作战的角度考虑,战术价值相对有限。在下一步研究中,应结合实际加强逻辑型识别方法的研究,实现复杂战场环境下可靠的敌我识别。
3 基于信息融合的研究分类
信息融合能将空中目标敌我识别中宽泛的信息转化为规范的数学语言,再通过算法对其进行融合处理,进而得到一个科学合理的结果,是空中目标敌我识别中的关键一环。
3.1 基于BPA构造方法的研究分类
规范统一的BPA是实现空中目标敌我识别信息融合的重要前提。本节针对空中目标敌我识别中常用的基于隶属度函数的BPA构造方法和基于智能算法的BPA构造方法进行归纳分析,最后从BPA获取效果、算法复杂度和战术价值三个方面进行总结。
3.1.1 基于隶属度函数的BPA构造方法
模糊集理论[30]、粗糙集理论[31]和直觉模糊集理论[32]是经典集合理论的拓展,能够合理地表示不确定现象,还可以同其他不确定性推理的方法相结合,更加合理地获取BPA。隶属度函数[33]作为模糊理论中的一个重要工具,可以将军事专家经验转为函数形式,使获取的BPA符合空中目标敌我识别的逻辑,因此在空中目标敌我识别中应用较为广泛。目前,在D-S证据理论中确定隶属度函数的方法主要有:参考函数法、专家评议法、模糊统计法、三分法、样板法、判断矩阵分析法、数值迭代统计法等。
参考函数法[34]是根据所要求解问题的性质套用现成的隶属度分布函数,虽然相对主观,但其原理是根据军事专家经验和作战实际而选取的。文献[23]选用参考函数法建立梯形隶属度函数来构造BPA,梯形隶属度稳定性较好,采用软件进行仿真时,计算相对简便,实时性较强,但其敏感性相对较差,只适用于目标数量类型变化较少的情况。为增强隶属度函数敏感性,确保该函数能够适用于目标数量类型变化较为复杂的情况。文献[35-37]选择三角形隶属度函数来获取BPA。不同的是,文献[35]通过计算目标模型与样本模型的相似度来获取BPA,这种方法通过与现有的目标战术数据库进行对比,获取的结果更有可信度,不足之处是需要大量数据进行训练,实时性较差,且无法识别数据库中没有的目标。文献[36]将k-means聚類算法同三角隶属度函数相结合,根据训练数据与测试数据的关系生成初始BPA,从算法层面上来讲比单纯的三角隶属度函数更加精确,但是和文献[35]存在同样的问题。文献[37]利用统计样本中得出的目标速度信息,构建相应的三角形隶属度函数来获取BPA,计算量较小,节约了时间和成本,但该方法获取的信息较少,相对片面,适用范围有限。
除了参考函数法,还有许多学者选用了其他方法来构造隶属度函数。文献[17]针对飞机编号、飞行员信息和最小安全速度,采用专家评议法构造隶属度函数,对飞机的航速则采用模糊统计的方法构造隶属度函数,但其隶属度函数的阈值选择比较笼统,识别精度有待加强。Gabriel等[38]从隶属函数的扩展对决策准确性的影响角度考虑,在训练数据和建模阶段,通过调整常用的隶属度函数形状分布来提高精确度,使获取的BPA更加准确。李军等[39]针对目标多特征的BPA难以获取的问题,使用三分法构造BPA,首先建立特征隶属度矩阵,然后基于样本数据与中心点的偏差程度衡量目标特征可信度,通过特征矩阵列向量与可信度相乘确定目标的重要程度,最后对其归一化,即可求得BPA。该方法能够充分利用目标身份特征,减少传感器本身的误差影响,具有较强的抗干扰性能。冯至等[40]将证据理论与粗糙集相结合,提出了一种基于证据权重的BPA获取方法,该方法利用决策表确定证据权重,对决策的可信度进行修正从而获取BPA,可以减少证据冲突,与文献[41]相比,验证了引入权重在提高空中目标敌我识别方面的重要作用。文献[25]提出将D-S证据理论与直觉模糊集相结合来获取BPA,该方法在传感器获取的原始BPA基础上,依据证据权重采用顺次信度分配法将原始BPA扩展为辨识框架中各个元素的BPA,再将其转化为IFS决策问题,提高空中目标敌我识别的准确性。赵凌伟[42]提出了基于熵权灰色关联度建立BPA计算模型,可以直接计算出单个传感器的BPA,在此基础上进行时域和空域的融合,能够较为准确地获取最终的识别结果,提高了敌我识别的准确性。
综上,文献[23]的方法虽然稳定性较好,但其对输入不够敏感,适用于潜在的目标类型已知的情况,对新出现的目标类型BPA获取能力相对较差。文献[35-37]的方法对输入有较为迅速的反馈,但其BPA的获取需要大量试验数据作为支撑,实时性相对较差,对于数据库外的目标BPA获取能力较差,只适用于预先长期固定的敌我识别系统,不适用于前线临时敌我识别。文献[17]建立的隶属度函数比较笼统,局限性较大,可以作为一种建模思路,但其应用价值有限。文献[38]的方法通过调整隶属度函数分布来提高精确度,为隶属度函数模型的建立提供了参考。文献[39]仿真结果表明,由于该算法获取的BPA差距较小,在发生误判的情况下,若误判对象不同,该算法依然可以得到较为合理的BPA;若误判对象相同,则无法合理获取BPA。文献[40]可以为敌我识别提供一种新的思路,但其需要大量且逐一计算传感器精度,算法复杂度较高。文献[25]提出的方法计算复杂度适中,更加贴近作战实际。文献[42]提出的方法单次测量计算简单,但进行融合识别时需要结合先验信息,计算较为复杂,但准确性很髙。
3.1.2 基于智能算法的BPA获取方法
在空中作战中,空中态势往往呈现出多维、非线性的态势,智能算法能够将复杂的实际问题转化为简洁的数学语言,通过其内置的运算规则加快运算进程,将多维、非线性的空中态势降维简化,为空中目标识别问题提供定量分析和计算方法,符合人的思维逻辑。
张志[43]提出一种使用BP神经网络获取BPA的方法,该方法通过红外传感器采集目标面积、周长等22类信息、88组数据,根据属性分为4组,利用BP神经网络非线性映射能力直接转化为D-S证据理论中的BPA,更具有客观性。Liu等[44]提出一种加权模糊D-S证据理论来获取BPA,该方法将模糊朴素贝叶斯方法与均值分类规则结合来获取BPA,有助于D-S框架自适应解决不同问题。陈雁飞[45]提出的BPA获取方法,采用混淆矩阵记录训练结果,然后使用贝叶斯推理获取辨识框架中各个元素的概率,最后通过简单或一致性支持函数获取BPA,为空中目标敌我识别提供一定参考。Deng等[46]提出了一种基于混淆矩阵的BPA获取方法,该方法基于召回矩阵和精度矩阵对混淆矩阵中的每个类别构造BPA。文献[22]考虑目标识别中的主客观因素,使用带概率因子的乘型模糊神经网络构建隶属度函数,通过敌我识别判决准则获取可信度,最后利用Shafer折扣规则修正获取BPA。Qin等[47]提出了基于改进区间数的BPA获取方法,该方法基于测试样本与构建模型之间的距离和距离间隔的相似性来获取BPA,具有较好的抗干扰性。
综上,基于智能算法获取的BPA更加客观,运算处理速度更快,但大多数情况下,需要大量的试验数据作为支撑,小样本条件下获取的BPA精确度会有所下降,在目标较少且数据库中没有该目标时,BPA获取的精度就会下降,如文献[22,43-45,47]等;此外,部分智能算法模型比较复杂,在处理新突发情况下的空中目标敌我识别情况时会增加建模时间,不利于达到快速获取BPA进行识别的目的,如文献[46]等。
3.1.3 基于BPA构造方法的研究分类总结
对空中目标敌我识别信息融合中的BPA构造方法进行归纳与分析,从BPA获取效果、算法复杂度和战术价值三个方面的总结如表2所示。
从表2可以看出,在空中目标敌我识别的信息融合中,基于隶属度函数的BPA构造方法研究相对较多,战术价值高的也比较多。这是因为空中目标敌我识别中的BPA构造不是一个简单的数学过程,而是需要融入指挥官的判断力和决策力,使获取的BPA包含有一定的战术信息。同时,隶属度函数的构造是基于军事专家经验和作战实际这个客观条件,所以隶属度函数虽然带有一定的主观特征,但从作战实际考虑,是较为客观的。其优良的适应性可用于复杂情况下的敌我识别,但其在处理大量数据时还有一定的缺陷,需要结合智能算法合理使用。智能算法在处理大量数据时具有优势,但多数情况下需要进行训练数据与样本数据的比对,对于超出目标数据库的信息就难以处理。在以后的研究中需要根据情况合理选择使用。
3.2 基于冲突证据融合的研究分类
在空中目标敌我识别过程中,各类传感器容易受到电磁环境的干扰,以及各种环境和人为因素的影响,会使获取的证据在信息融合后产生与人的直觉相悖的结果,如1信任悖论、0信任悖论、全冲突悖论、证据吸收悖论、信任偏移悖论、焦元基模糊悖论等[48],降低了识别结果的精确性。因此,应选择合理的方法消解证据之间的冲突。本节从修改组合规则和修改证据源两个方面对空中目标敌我识别中的冲突证据融合方法进行归纳分析,最后从融合效果、复杂程度和战术价值三方面进行总结。
3.2.1 基于修改组合规则的冲突证据融合
修改组合规则作为一种乘性策略,重点研究的是冲突的再分配,即需要分配冲突的子集,以及以什么样的比例把冲突分配给子集[49-50]。
全局冲突分配是将冲突分配给未知命题或者是辨识框架。在早期研究中,代表性的方法有Smets[51]提出的基于可傳递置信模型的全局冲突分配方法,以开世界假设为前提,不做归一化处理,将冲突分配给空集,但在实际应用中,很多时候开世界假设难以满足。Yager[52]以闭世界假设为前提,提出了将冲突赋给辨识框架的全局冲突分配法。杭文庆等[53]以闭世界假设为前提,建立可信度模型确定权重,对冲突进行全局分配,同时又考虑到空中作战中可能出现的新情况,以开世界假设为前提,将内外协调因子作为权重,对冲突进行全局分配,该方法更符合应用实际,为空中目标敌我识别提供了参考。
局部冲突分配通常需要引入冲突分配权重,将冲突按照权重分配给相关元素。Lefevre等[54]提出了一种经典的局部冲突分配法,根据信息融合时的证据源数量和冲突之间的关系,确定冲突分配比例,将冲突分配给各个子集。许红波等[55]针对传统D-S证据理论在处理多特征冲突信息方面的弱势,以雷达和ESM获取的目标调制特征、辐射源载频、脉冲宽度、脉冲重复周期等特征为例,提出了一种推广的组合规则,将冲突分配给冲突焦元,从技术层面减少了融合中不确定性影响,提升了技术型传感器信息融合中的精确度。Guo等[56]提出了一种基于证据之间交叉融合策略的D-S证据理论组合规则,该方法充分利用证据的可靠性,减少不确定性信息对融合结果的影响,并在证据组合之间按照比例分配冲突,使融合结果更加简洁、合理、有效。李洋等[57]考虑复杂战场环境下的信息融合中可能出现的冲突证据,选用雷达、红外、电子侦察设备、通信侦察设备和光电等各类传感器,直接获取目标类型的初始BPA,利用PCR5规则计算各传感器自身获取的证据之间的冲突,将冲突分配给冲突焦元,获取修正后的BPA,再进行统一的融合,该方法既可以实现低冲突证据的融合,又可以实现高冲突证据的融合。方怡等[58]提出了一个改进的组合规则对冲突证据进行融合,该方法基于Euclidean距离确定证据支持度,以证据支持度标准偏差确定对证据的平均支持水平,并以此作为权重,进行局部冲突分配。张安安等[59]采用局部冲突分配策略,选用向下聚焦法对冲突证据进行融合,该方法对产生冲突的证据个体进行分析,考虑焦元基数在信息融合中的影响,将冲突分配给基数更小的焦元,实现了较好的融合,同时克服了Lefevre规则参数设置过多的问题。Zhang等[50]提出的改进组合规则,能够通过证据相关系数建立新的冲突衡量参数,可以有效融合冲突证据,提高合成结果的可靠性。
综上,文献[53]提出的方法综合考虑我机、友机、预警机和地面传感器之间的融合问题,考虑了空战出现新情况时的融合方法,其融合结果比文献[51]的融合结果更加合理,不确定性影响更少。文献[55]提出的方法从探测目标的电磁信号的研究背景入手,推广D-S组合规则的使用范围,有效处理了证据冲突,但试验结果表明,其精度提升有限,仍有较大的改进空间。文献[56]提出的方法极大地增强了信息融合中的抗干扰性及容错能力,可以为空中目标敌我的信息融合提供一定的参考。文献[57,59]通过与D-S组合规则、文献[52]对比,取得了较好的效果,但该方法处理周期较长、计算量相对较大,实时性相对较弱。文献[50,58]的融合结果较于传统D-S组合有了极大的提高,但其没有考虑数据量较大情况下的处理速度问题,会导致计算量增加,处理时间增长,仍需改进。
3.2.2 基于修改证据源的冲突证据融合
修改证据源作为一种加性策略,认为证据冲突的产生是由传感器自身的可靠性、复杂的环境和其他因素造成的,与D-S组合规则没有关系。该方法认为在信息融合时,应首先对证据进行预处理,然后通过D-S组合规则进行融合,以实现消解冲突的目的。目前对证据源修改的方法主要有Shafer折扣法和加权平均法。
文献[10]提出的Shafer折扣法,引入了可信度概念,依据不同证据的可信度确定权重,并将其作为折扣系数,使用Shafer折扣规则对证据源进行修改。文献[29]提出的修改证据源方法,通过利用遗传算法进行计算证据折扣系数,对证据源进行修正,保留没有冲突的物理特征信息,并将其作为下一步融合中的先验信息。该方法不容易受到敌方伪装和欺骗的干扰,具有较好的应用价值。董杰等[60]提出了一种改进的修改证据源的方法,该方法基于Euclidean距离确定证据折扣系数,对证据源进行修正,减少了不可靠传感器的消极影响,具有更好的空中目标敌我识别效果。張阳[61]提出了决策级证据源修改方法,该方法在软决策融合中使用证据不一致性函数确定权重,采用加权平均法对证据源进行修正,在硬决策融合中采用Jousselme距离确定权重,使用证据折扣法对证据源进行修正,提供了一种决策层信息融合的新思路。
加权平均法通过权重反映了证据对融合结果的影响程度,对证据按照权重修改并进行加权平均。文献[21]提出的简单平均法,将每个证据的BPA进行平均,然后通过D-S组合规则进行融合,但没有考虑证据之间的关联性,还存在一定的局限。文献[25]提出了一种基于改进证据相关系数的修改证据源方法,该方法在经典相关系数构造方法基础上,引入雅克比矩阵对证据进行预处理,在此基础上计算证据可信度,并将其作为权重,采用加权平均法,对证据源进行修正。Li等[62]提出的修改证据源方法,可以利用证据余弦计算证据之间的相似度,构造相似矩阵,以此为基础计算每个证据的可信度,并将其作为权重,采用加权平均法对证据源进行修正。Xiao[63]提出了一种基于信念差异度量修改证据源的方法,该方法通过构造信念差异度量矩阵来确定证据权重,采用加权平均法对证据源进行修改,更适用于多传感器决策时使用。常玉婷等[64]提出了一种基于改进证据支持度的方法,该方法考虑空中目标敌我识别中复杂环境、电磁干扰对传感器的影响,利用Jousselme距离计算证据权重,采用加权平均法对证据源进行修正,有效降低失效传感器对空中目标敌我识别的影响,能够获得比较符合实际的结果。Zhao等[65]提出了一种基于节点可信度修正证据源的方法,该方法与CPS中传感器节点有效结合,将融合源传感器的可信度的平均值作为该融合后证据的可信度,通过加权平均法对证据源进行修正。
综上,文献[29,60]提出的方法能够极大地提高融合结果的精确度,但需要依托智能算法确定权重,对于数据库以外的目标权重确定较为困难。文献[61]提出的方法,可以应用于相对比较复杂情况下的融合,但其未对不精确数据进行合理分类,会降低融合可靠性。文献[25]提出的方法经过试验验证与文献[66]结果一致,验证了其可行性,同时考虑了复杂情况下可信度不同的实际情况,具有较好的应用价值。文献[62]提出的方法计算量小,节省了计算时间和成本,通过多周期融合,充分利用历史信息,有效降低了错误识别的风险,提高了融合结果的可靠性和鲁棒性。文献[64]提出的方法保证了权重大的证据在融合中的影响作用,降低了权重小的证据的不良影响,可以有效处理高冲突证据,具有较好的收敛性。文献[63,65]提出的方法能够极大地提高融合结果的精确度,但其算法本身计算较为复杂性,不利于快速融合。
3.2.3 基于冲突证据融合的研究分类总结
对空中目标敌我识别信息融合中的冲突证据融合方法进行较为详细的归纳与分析,从融合效果、算法复杂度和战术价值三个方面的总结如表3所示。
从表中可以看出,基于修改证据源的冲突证据融合方法的算法复杂度整体较低,战术价值整体较高。这是因为在实际应用中,传感器的性能、战场电磁干扰的程度、雷达操作员的能力素质、指挥官的决策能力,都会对传感器获取的信息产生不同程度的影响,这些影响或多或少会使证据产生一定的冲突。如果不在信息融合的起始节点对可能存在的冲突进行消除,那么在接下来的融合过程中,这些冲突可能会持续存在,影响融合结果。修改证据源恰好可以从源头解决这个问题,又可以保持D-S组合规则原有的数学性质。基于修改组合规则的冲突证据融合方法,把这些冲突当作有用信息,使用不同的方式将这些冲突分配给相关证据,充分利用了信息,但增加了计算量; 同时,修改组合规则的方法可能会丢失原有D-S组合规则的数学性质。因此在实际应用中,应根据需求选用合适的方法进行信息融合。
3.3 基于融合方式的研究分类
实际应用中,为避免我方传感器遭到敌方压制或攻击而丧失功能,传感器通常会分散配置,然后通过相应的通信链路进行连接组网,确保可以态势共享、信息互通,实现集中式融合、分布式融合、混合式融合的功能。在进行空中目标敌我识别时,指挥官会根据战场态势合理选择融合方法,确保发挥最大的作战效能。
文献[37,60]等采用集中式融合的方式进行空中目标敌我识别。在这种融合方式下,各传感器不进行敌我识别,而是将获取的信息直接传输至信息融合中心进行融合处理。其优势在于可以避免各传感器进行敌我识别时的误判,具有较高的精确性,并且可以充分利用信息,但是其成本相对较高、处理周期较长、战场生存能力相对较差,若信息融合中心被摧毁就会丧失敌我识别能力。
文献[25,53,57,59]等采用分布式融合方式进行空中目标敌我识别,首先需要各传感器进行敌我识别,然后将识别后的结果传输至信息融合中心进行融合处理。这种方式的优势在于成本低、处理速度快、战场生存能力强,但其信息利用率较低,若传感器发生误判,就会影响后续的融合结果精确度。
综上,在实际应用中,应根据实际情况合理选择融合方式。但目前在基于D-S证据理论的空中目标敌我识别研究中,大多数研究关注的重点在于信息融合中的BPA构造方法问题和冲突证据融合问题,对融合方式只是简要叙述,并没有深入探索。因此,下一步应加强相关方面的研究。
4 研究前景
4.1 空中目标敌我识别的研究前景
通过分析可知,目前国内外对空中目标敌我识别的研究主要集中于技术型识别方法的研究,忽略了技术型方法在实际应用情况下的不足。为弥补上述研究缺陷,结合美军经验和国内研究现状[67],提出了一种新的空中目标综合识别方法。
空中目标综合识别是利用协作式和非协作式敌我识别系统等技术手段,结合空域协同措施[68]、目标战术特征[69]、开源情报等战术规则,对空中目标敌我属性进行识别的过程。空中目标综合识别方法以敌我识别系统为主要技术手段,能够快速准确地对空中目标的敌我属性进行识别,是判断空中目标敌我属性的主要依据。以空域协同措施(如低高度层穿越通道(Low Level Transit Route,LLTR)、最小风险通道(Minimum Risk Route,MRR)等)为主的程序性手段,能对技术手段中存在疑问的识别结果进行验证和再次识别,可以降低敌我识别系统的错判风险,是空中目标敌我识别的辅助手段。具体模型如图4所示。
其中,敌我识别器开/关线沿敌我对峙线平行设置。当空中目标由敌军空域返回我军空域时,在此线打开敌我识别器,由我军敌我识别系统获取该空中目标的身份信息,对敌我识别器获取的信息与地面其他传感器获取的信息进行融合识别。此阶段,如果敌我融合识别能明确识别空中目标为敌军或者我军,那么以此作为最终识别结果。若此阶段敌我融合识别的结果为不明,则依据后续所设置的空域协同措施,对空中目标敌我属性进行进一步融合识别。为避免误判,在这个过程中应根据融合识别结果的可信度,赋予目标不同等级的属性标签,然后结合指挥官意图,决定继续识别还是采取相应的对策。如果需要继续识别,则根据指挥官意图选取一定的阈值范围,对可信度处在这个范围内的目标,继续识别其敌我属性。此时可通过设置其他空域协同措施或其他战术规则继续识别,直至识别出明确的敌我属性。以“低高度层穿越通道”為例[70],该通道会明确空中目标在此通道内的高度、速度、航向等。当空中目标在该通道内飞行时,应使用逻辑型传感器获取其身份识别信息,将雷达测得的各信息要素与其他基于战术规则的信息要素进行融合,以获取最终的识别结果。若空中目标能够按照规定的飞行参数飞行并符合相应的战术特征,那么融合后的信息会判定该目标为我军,否则判定为敌军。若部分符合或者不符合,则赋予其不同等级的属性标签,根据情况选用其他逻辑型传感器进行再一次识别,直至得到明确的敌我属性。具体流程如图5所示。
空中目标综合识别方法有效结合了技术型识别方法和逻辑型识别方法的优点,适用于各种作战情景,可作为空中目标敌我识别中的重点方向展开研究。
4.2 D-S证据理论在空中目标敌我识别中的应用展望
D-S证据理论与目标识别是信息融合领域的研究热点之一。国内外大量专家学者对其进行了丰富的研究和拓展,提出了许多改进的方法和创新的算法。D-S证据理论及其改进方法的合理使用,会对目标识别的结果产生非常重要的影响。结合前面的分析与新提出的空中目标综合识别方法,对D-S证据理论在空中目标敌我识别中仍需要进一步研究的问题进行总结。
一是多周期融合问题。根据分析可知,目前大多数文献主要是从改进算法角度进行研究,对多周期融合问题研究较少。空中目标敌我识别是一个动态连续的过程,仅一个周期的识别会极大增加误判风险。本文所提出的空中目标综合识别方法同样需要进行多周期融合才能保证识别连续性,达到敌我准确识别的目的。因此在后续研究中,应将多周期融合作为一个重点方面进行研究,以求贴近实际。
二是识别结果可信度问题。目前大多数文献主要是为了实现冲突证据融合,研究证据的可信度或者是冲突的权重分配问题,对于识别结果可信度的关注相对较少。本文提出的空中目标综合识别方法,根据识别结果的可信度赋予目标不同的属性标签,然后根据指挥官意图决定是否继续识别,这种方式能够从识别结果层面减少误判,更加符合应用实际。因此,下一步研究中,可以考虑在得到融合后结果时,选用合理的方法评估其可信度,然后结合指挥官意图,决定继续识别还是采取其他相应的对策。
三是算法适用性问题。以D-S证据理论两个基本问题为例,在构造BPA和冲突证据融合上,目前大多数文献采用的方法都是对应特定的研究背景和研究对象,通用性相对较弱。在实际应用中,指挥官可能会随时启用或者关闭敌我识别的设备,变更敌我识别方法等,以满足当前的任务需要。那么如何实现算法适用于不同的任务背景或者是实现不同任务背景下不同算法的合理衔接,仍是下一步需要关注的重点。
5 结 束 语
证据理论在处理不确定性信息等方面具有很强的优势,在目标识别、信息融合等方面发挥了十分重要的作用。本文较为全面地理清了D-S证据理论在空中目标敌我识别领域的发展脉络,对其研究现状进行了分析与总结,通过借鉴美军经验,提出了一种更加贴近实际需要的空中目标敌我识别方法。该方法更符合指挥官的指挥与决策逻辑,通俗易懂,能够为后续的空中目标敌我识别理论研究提供参考。在此基础上提出了几点D-S证据理论在空中目标敌我识别中应重点关注的方向,为基于D-S证据理论的空中目标敌我识别的发展和深化提供参考。
参考文献:
[1] 肖顺旺, 李升才, 张长泉, 等. 敌我识别系统及其进展[J]. 火力与指挥控制, 2008, 33(11): 5-7.
Xiao Shunwang, Li Shengcai, Zhang Changquan, et al. The Identification Friend or Foe System and Its Development[J]. Fire Control and Command Control, 2008, 33(11): 5-7. (in Chinese)
[2] 冯酉鹏. 空中目标识别与跟踪技术的研究[D]. 沈阳: 沈阳理工大学, 2020.
Feng Youpeng. Research on Aerial Target Recognition and Tracking Technology[D]. Shenyang: Shenyang Ligong University, 2020. (in Chinese)
[3] Boonpoonga A, Chomdee P, Burintramart S, et al. Simple Estimation of Late-Time Response for Radar Target Identification[J]. Radio Science, 2017, 52(6): 743-756.
[4] Lee S J, Jeong S J, Yang E, et al. Target Identification Using Bistatic High-Resolution Range Profiles[J]. IET Radar, Sonar & Navigation, 2017, 11(3): 498-504.
[5] 苏军平. 多传感器信息融合关键技术研究[D]. 西安: 西安电子科技大学, 2018.
Su Junping. Research on the Key Technology of the Multi-Sensor Information Fusion[D]. Xian: Xidian University, 2018. (in Chinese)
[6] 卢莉萍, 張晓倩. 复杂环境下多传感器目标识别的数据融合方法[J]. 西安电子科技大学学报, 2020, 47(4): 31-38.
Lu Liping, Zhang Xiaoqian. Data Fusion Method of Multi-Sensor Target Recognition in Complex Environment[J]. Journal of Xidian University, 2020, 47(4): 31-38. (in Chinese)
[7] Khaleghi B, Khamis A, Karray F O, et al. Multisensor Data Fusion: A Review of the State-of-the-Art[J]. Information Fusion, 2013, 14(1): 28-44.
[8] 祁友杰, 王琦. 多源数据融合算法综述[J]. 航天电子对抗, 2017, 33(6): 37-41.
Qi Youjie, Wang Qi. Review of Multi-Source Data Fusion Algorithm[J]. Aerospace Electronic Warfare, 2017, 33(6): 37-41. (in Chinese)
[9] Dempster A P. Upper and Lower Probabilities Induced by a Multivalued Mapping[J]. Annuals of Mathematical Statistics, 1967, 38(2): 325-339.
[10] Shafer G. A Mathematical Theory of Evidence[M]. Princeton: Princeton University Press, 2020: 3-34.
[11] 时洪会, 蒋文保. D-S证据理论综述[J]. 信息化建设, 2015 (11): 331.
Shi Honghui, Jiang Wenbao. Overview on D-S Evidence Theory[J]. Information Construction, 2015 (11): 331. (in Chinese)
[12] 吕辉, 贺正洪. 防空指挥自动化系统原理[M]. 西安: 西安电子科技大学出版社, 2003: 32-33.
Lü Hui, He Zhenghong. Principle of Air Defense Command Automation System[M]. Xian: Xidian University Press, 2003: 32-33. (in Chinese)
[13] 朱方, 王付明. 基于模糊信息论的空中目标识别模型研究[J]. 指挥控制与仿真, 2006, 28(1): 111-115.
Zhu Fang, Wang Fuming. Research on Aerial Target Identification Model Based on Fuzzy Information Theory[J]. Command Control & Simulation, 2006, 28(1): 111-115.(in Chinese)
[14] 王小謨, 张光义. 雷达与探测: 信息化战争的火眼金睛[M]. 2版. 北京: 国防工业出版社, 2016: 20-21.
Wang Xiaomo, Zhang Guangyi. Radar and Detection: Discerning Eyes of Information War[M]. 2nd ed. Beijing: National Defense Industry Press, 2016: 20-21. (in Chinese)
[15] 黄山良, 卜卿, 梅发国. 防空探测预警系统与技术[M]. 北京: 国防工业出版社, 2015: 159-160.
Huang Shanliang, Bu Qing, Mei Faguo. Air Defense Detection and Early Warning System and Technology[M]. Beijing: National Defense Industry Press, 2015: 159-160.(in Chinese)
[16] 罗俊海, 杨阳. 基于数据融合的目标检测方法综述[J]. 控制与决策, 2020, 35(1): 1-15.
Luo Junhai, Yang Yang. An Overview of Target Detection Methods Based on Data Fusion[J]. Control and Decision, 2020, 35(1): 1-15. (in Chinese)
[17] 谭源泉, 李怡, 张柯. 基于模糊集与证据理论的敌我识别新方法[J]. 电波科学学报, 2012, 27(3): 578-582.
Tan Yuanquan, Li Yi, Zhang Ke. New Method of Identification Friend or Foe Integrating the Fuzzy Set Theory and Evidential Theory[J]. Chinese Journal or Radio Science, 2012, 27(3): 578-582. (in Chinese)
[18] 张兵, 卢焕章. 多传感器自动目标识别中的冲突证据组合方法[J]. 系统工程与电子技术, 2006, 28 (6): 857-860.
Zhang Bing, Lu Huanzhang. Combination Method of Conflict Evidence in Multi-Sensor Automatic Target Recognition[J]. Systems Engineering and Electronics, 2006, 28 (6): 857-860. (in Chinese)
[19] Tan Y Q, Yang J Y, Li L C, et al. Data Fusion of Radar and IFF for Aircraft Identification[J]. Journal of Systems Engineering and Electronics, 2012, 23(5): 715-722.
[20] 陈丽家. 基于IFF与雷达的敌我识别算法研究[D]. 成都: 电子科技大学, 2012.
Chen Lijia. Friend or Foe Identification Algorithm Study Based on IFF and Radar[D].Chengdu: University of Electronic Science and Technology of China, 2012. (in Chinese)
[21] Murphy C K. Combining Belief Functions When Evidence Conflicts[J]. Decision Support Systems, 2000, 29(1): 1-9.
[22] 朱昕. 基于雷达与IFF信息融合的敌我识别方法研究[D]. 成都: 电子科技大学, 2013.
Zhu Xin. Study of Identification of Foe Based on Information Fusion of Radar and IFF[D]. Chengdu:University of Electronic Science and Technology of China, 2013. (in Chinese)
[23] 吴强, 姜礼平, 季傲. 基于模糊集和D-S证据理论的空中作战目标識别[J]. 指挥控制与仿真, 2015, 37(4): 54-58.
Wu Qiang,Jiang Liping,Ji Ao. Aircraft Target Identification Based on Fuzzy Sets and D-S Evidence Theory in Air Operation[J]. Command Control & Simulation, 2015, 37(4): 54-58. (in Chinese)
[24] 孙俊, 陈亚伟, 李崇谊, 等. 基于雷达宽窄带多特征信息融合的空中目标识别[J]. 现代雷达, 2015, 37(7): 15-19.
Sun Jun, Chen Yawei, Li Chongyi, et al. Fusion Recognition of Air Target Based on DS Evidence Theory with Wideband and Narrowband Characteristics[J]. Modern Radar, 2015, 37(7): 15-19. (in Chinese)
[25] 徐浩, 邢清华, 王伟. 基于DST-IFS的空中目标敌我属性综合识别[J]. 系统工程与电子技术, 2017, 39(8): 1757-1764.
Xu Hao, Xing Qinghua, Wang Wei. Integrated Air Target Identification of Friend or Foe Based on DST-IFS[J]. Systems Engineering and Electronics, 2017, 39(8): 1757-1764. (in Chinese)
[26] 庞梦洋, 索中英, 郑万泽, 等. 基于三支决策的空中目标敌我识别方法[J]. 探测与控制学报, 2020, 42(1): 115-120.
Pang Mengyang, Suo Zhongying, Zheng Wanze, et al. Air Target Identification Method Based on Three-Way Decisions[J]. Journal of Detection & Control, 2020, 42(1): 115-120. (in Chinese)
[27] 王成. 基于DSmT的飞行目标识别与跟踪[D]. 绵阳: 西南科技大学, 2016.
Wang Cheng. Recognition and Tracking for Flight Target Based on DSmT[D]. Mianyang: Southwest University, 2016. (in Chinese)
[28] 李进军, 丛蓉, 熊吉光. 融合目标战术特征的空中目标类型识别模型[J]. 舰船科学技术, 2005, 27 (3): 46-49.
Li Jinjun, Cong Rong, Xiong Jiguang. Differentiating Model of Aerial Targets Type Integrated with Targets Tactical Characteristics[J]. Ship Science and Technology, 2005, 27(3): 46-49. (in Chinese)
[29] 崇元, 李加祥, 艾葳, 等. 融合战术与修正物理特征的空中目标战术类型识别[J]. 火力与指挥控制, 2016, 41(12): 150-154.
Chong Yuan, Li Jiaxiang, Ai Wei, et al. Aerial Target Tactics Recognition Integrated with Targets Tactical and Amendatory Physics Characteristics[J]. Fire Control & Command Control, 2016, 41(12): 150-154. (in Chinese)
[30] 陈水利, 李敬功, 王向公. 模糊集理论及其应用[M]. 北京: 科学出版社, 2005: 2-4.
Chen Shuili, Li Jinggong, Wang Xianggong. Fuzzy Set Theory and Its Application[M]. Beijing: Science Press, 2005: 2-4. (in Chinese)
[31] Pawlak Z. Rough Sets[J].International Journal of Computer Information Science, 1982, 11(5): 341-356.
[32] Atanassov K T. Intuitionistic Fuzzy Sets[J]. Fuzzy Sets and Systems, 1986, 20(1): 87-96.
[33] Zadeh L A. Fuzzy Sets[J].Information and Control, 1965, 8(3): 338-353.
[34] 余琼芳, 陈迎松. 模糊数学中隶属函数的构造策略[J]. 漯河职业技术学院学报: 综合版, 2003, 2(1): 12-14.
Yu Qiongfang, Chen Yingsong. The Constructing Policy of Membership Function in Fuzzy Mathematics[J]. Journal of Luohe Vocational and Technical College: Comprehensive, 2003, 2(1): 12-14. (in Chinese)
[35] Jiang W, Yang Y, Luo Y, et al. Determining Basic Probability Assignment Based on the Improved Similarity Measures of Generalized Fuzzy Numbers[J]. International Journal of Computers, Communications & Control, 2015, 10(3): 333-347.
[36] Ma T S, Xiao F Y. An Improved Method to Transform Triangular Fuzzy Number into Basic Belief Assignment in Evidence Theory[J]. IEEE Access, 2019, 7: 25308-25322.
[37] Wang K. A New Multi-Sensor Target Recognition Framework Based on Dempster-Shafer Evidence Theory[J]. International Journal of Performability Engineering, 2018: 14(6): 1224-1233.
[38] Awogbami G, Homaifar A. A Reliability-Based Multisensor Data Fusion with Application in Target Classification[J]. Sensors, 2020, 20(8): 2192.
[39] 李軍, 黄力伟. 基于目标多特征的mass函数确定方法[J]. 计算机应用研究, 2017, 34(8): 2312-2314.
Li Jun, Huang Liwei. Mass Function Construction Method Based on Objective Characteristics[J]. Application Research of Computers, 2017, 34(8): 2312-2314. (in Chinese)
[40] 冯至, 李强, 蔡莉. 基于粗糙集和证据理论的目标身份融合方法[J]. 空军预警学院学报, 2016, 30(3): 194-197.
Feng Zhi, Li Qiang, Cai Li. Method of Target Identity Fusion Based on Rough Set and Evidence Theory[J]. Journal of Air Force Early Warning Academy, 2016, 30(3): 194-197. (in Chinese)
[41] 路艳丽, 雷英杰, 王晶晶. 基于粗糙D-S理论的身份融合方法[J]. 系统工程与电子技术, 2007, 29(10): 1749-1752.
Lu Yanli, Lei Yingjie, Wang Jingjing. Identity Fusion Method Based on Rough Sets and D-S Theory[J]. Systems Engineering and Electronics, 2007, 29(10): 1749-1752. (in Chinese)
[42] 趙凌伟. 基于熵权灰关联和证据理论的辐射源识别方法[J]. 电子测量技术, 2017, 40(4): 34-38.
Zhao Lingwei. Radiation Source Identification Based on Entropy-Weight Gray Correlation and Evidence Theory[J]. Electronic Measurement Technology, 2017, 40(4): 34-38. (in Chinese)
[43] 张志. 多传感器信息融合及其应用研究[D]. 西安: 西安电子科技大学, 2017.
Zhang Zhi. Research on Multi-Sensor Information Fusion and Its Application[D]. Xian: Xidian University, 2017. (in Chinese)
[44] Liu Y T, Pal N R, Marathe A R, et al. Weighted Fuzzy Dempster-Shafer Framework for Multimodal Information Integration[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(1): 338-352.
[45] 陈雁飞. 基于证据理论的海上目标综合识别若干问题研究[D]. 哈尔滨: 哈尔滨工程大学, 2015.
Chen Yanfei. Research on Multi-Source Data Fusion for Marine Target Recognition Based on Evidence Theory[D]. Harbin: Harbin Engineering University, 2015. (in Chinese)
[46] Deng X Y, Liu Q, Deng Y, et al. An Improved Method to Construct Basic Probability Assignment Based on the Confusion Matrix for Classification Problem[J]. Information Sciences, 2016, 340/341: 250-261.
[47] Qin B W, Xiao F Y. An Improved Method to Determine Basic Probability Assignment with Interval Number and Its Application in Classification[J]. International Journal of Distributed Sensor Networks, 2019, 15(1): 155014771882052.
[48] 杨风暴, 王肖霞. D-S证据理论的冲突证据合成方法[M]. 北京: 国防工业出版社, 2010: 65-72.
Yang Fengbao, Wang Xiaoxia. Combination Method Conflictive Evidences in D-S Evidence Theory[M]. Beijing: National Defense Industry Press, 2010: 65-72. (in Chinese)
[49] Horiuchi T. Decision Rule for Pattern Classification by Integrating Interval Feature Values[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1998, 20(4): 440-448.
[50] Zhang P D, Tian Y, Kang B Y. A New Synthesis Combination Rule Based on Evidential Correlation Coefficient[J]. IEEE Access, 2020, 8: 39898-39906.
[51] Smet P.The Combination of Evidence in the Transferable Belief Model[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1990, 12(5): 447-458.
[52] Yager R R. On the Dempster-Shafer Framework and New Combination Rules[J]. Information Science, 1987, 41(2): 93-137.
[53] 杭文庆, 姜长生. 基于多源信息和改进证据理论的空战攻击决策[J]. 电光与控制, 2010, 17(2): 26-30.
Hang Wenqing, Jiang Changsheng. Attacking Decision-Making of Air Combat Based on Multi-Source Information and Improved Evidence Theory[J]. Electronics Optics & Control, 2010, 17(2): 26-30.(in Chinese)
[54] Lefevre E, Colot O, Vannoorenberghe P. Belief Function Combination and Conflict Management[J]. Information Fusion, 2002, 3(2): 149-162.
[55] 許红波, 丁建江, 胡伟稿. D-S规则推广及其在飞机目标识别中的应用研究[J]. 雷达与对抗, 2006, 26(1): 34-38.
Xu Hongbo, Ding Jianjiang, Hu Weigao. A Study on the Extended D-S Rule and Its Application in Aircraft Target Recognition[J]. Radar & ECM, 2006, 26(1): 34-38. (in Chinese)
[56] Guo K H, Li W L. Combination Rule of D-S Evidence Theory Based on the Strategy of Cross Merging between Evidences[J]. Expert Systems with Applications, 2011, 38(10): 13360-13366.
[57] 李洋, 卓志敏, 张南, 等. 基于PCR5规则的非合作目标识别方法研究[J]. 中国电子科学研究院学报, 2019, 14(2): 123-128.
Li Yang, Zhuo Zhimin, Zhang Nan, et al. Research of Multi-Sensor Identification Technology for Non-Cooperative Target Based on PCR5[J]. Journal of China Academy of Electronics and Information Technology, 2019, 14(2): 123-128. (in Chinese)
[58] 方怡, 王先全, 李杰, 等. 基于D-S证据理论的目标识别融合应用[J]. 电脑知识与技术, 2020, 16(12): 190-192.
Fang Yi, Wang Xianquan, Li Jie, et al. Application of Target Recognition Fusion Based on D-S Evidence Theory[J]. Computer Knowledge and Technology, 2020, 16(12): 190-192. (in Chinese)
[59] 张安安, 彭嵩松, 杨威. 基于信任函数理论的修正融合目标识别算法[J]. 电子技术应用, 2015, 41(6): 84-87.
Zhang Anan, Peng Songsong, Yang Wei. A Modified Fusion Algorithm for Target Recognition Based on the Belief Function Theory[J]. Application of Electronic Technique, 2015, 41(6): 84-87. (in Chinese)
[60] 董杰, 蔡群, 丁锋, 等. 基于权值改进D-S理论的对空目标识别融合[J]. 现代防御技术, 2016, 44(2): 185-189.
Dong Jie, Cai Qun, Ding Feng, et al. Identifying Aerial Target Fusion Based on the Improved Weighting D-S Theory[J]. Modern Defense Technology, 2016, 44(2): 185-189. (in Chinese)
[61] 张阳. 基于决策级融合的无线传感器网络感知目标分类研究[D]. 北京: 北京交通大学, 2019.
Zhang Yang. Research on Perceived Target Classification Based on Decision Fusion in Wireless Sensor Networks[D]. Beijing: Beijing Jiaotong University, 2019. (in Chinese)
[62] Li J, Yang X Z, Zhou L. Multi-Sensor Target Recognition Based-on Multi-Period Improved DS Evidence Fusion Method[J]. Journal of Nanoelectronics and Optoelectronics, 2018, 13(5): 758-767.
[63] Xiao F Y. A New Divergence Measure for Belief Functions in D-S Evidence Theory for Multisensor Data Fusion[J]. Information Sciences, 2020, 514: 462-483.
[64] 常玉婷, 孫力帆, 普杰信, 等. 基于改进证据支持度的多传感器空中目标识别[J]. 计算机仿真, 2020, 37(7): 394-398.
Chang Yuting,Sun Lifan,Pu Jiexin, et al. Air Target Identification Using Multiple Sensors Based on Modified Evidence Support[J]. Computer Simulation, 2020, 37(7): 394-398. (in Chinese)
[65] Zhao G Z, Chen A G, Lu G X, et al. Data Fusion Algorithm Based on Fuzzy Sets and D-S Theory of Evidence[J]. Tsinghua Science Technology, 2019, 25(1): 12-19.
[66] 辛玉林, 邹江威, 徐世友, 等. DSmT理论在综合敌我识别中的应用[J]. 系统工程与电子技术, 2010, 32(11): 2385-2388.
Xin Yulin, Zou Jiangwei, Xu Shiyou, et al. Application of DSmT in Integrated Identification of Friend-or-Foe[J]. Systems Engineering and Electronics, 2010, 32(11): 2385-2388. (in Chinese)
[67] 张利群. 空战场管控[M]. 北京: 国防工业出版社, 2016: 138-139.
Zhang Liqun. Management and Control of Air Battlefield[M]. Beijing:National Defense Industry Press, 2016: 138-139. (in Chinese)
[68] 杨任农, 沈堤, 戴江斌. 对联合作战空战场管控问题的思考[J]. 指挥信息系统与技术, 2019, 10(1): 1-6.
Yang Rennong, Shen Di, Dai Jiangbin. Consideration for Management and Control Problems of Joint Operation Air Battlefield[J]. Command Information System and Technology, 2019, 10(1): 1-6. (in Chinese)
[69] 张志强, 钱建刚, 鲁瑞达. 一种空中目标敌我识别逻辑模型[J]. 雷达与对抗, 2013, 33(1): 9-11.
Zhang Zhiqiang, Qian Jiangang, Lu Ruida.An IFF Logical Model for Air Targets[J]. Radar & ECM, 2013, 33(1): 9-11. (in Chinese)
[70] 戴江斌, 万路军, 沈堤. 联合空域控制[M]. 北京: 航空工业出版社, 2019: 57-58.
Dai Jiangbin, Wan Lujun, Shen Di. Joint Air Battlefield Control[M]. Beijing: Aviation Industry Press, 2019: 57-58. (in Chinese)
Review of Friend-or-Foe Identification for Air Target
Based on D-S Evidence Theory
Chen Zhiyuan1, Shen Di1*, Yu Fuping1, Chen Hongyang2, Zhao Kai3
(1. Air Force Engineering University, Xian 710051, China; 2. Unit 93175 of PLA, Changchun 130000, China;
3. Unit 32145 of PLA, Xinxiang 453000, China)
Abstract: As an uncertain reasoning tool, D-S evidence theory can give full play to the advantages of multi-source information fusion and can improve the accuracy of friend-or-foe identification for air target. Starting from the practical application of friend-or-foe identification for air target, this paper introduces the basic principle of D-S evidence theory and sorts out the key problems to be solved in friend-or-foe identification for air target. Then, this paper summarizes and classifies the existing research methods from the two aspects of identification method and information fusion of friend-or-foe identification for air target, and summarizes the advantages, application scope and use value of each method. In the end, a new method of friend-or-foe identification for air target is proposed based on the existing research, and the application of D-S evidence in friend-or-foe identification for air target is prospected.
Key words: D-S evidence theory; air target; friend-or-foe identification; recognition method; information fusion
收稿日期:2020-09-05
基金項目:国家社科基金项目(18XGL026)
作者简介:陈致远(1993-),男,河南洛阳人,硕士研究生,研究方向为航空管制指挥与安全。
通讯作者:沈堤(1983-),男,湖南浏阳人,副教授,研究方向为空域规划与管理。
