货车高占比的交叉口转向罚函数分析及仿真应用
2021-08-23朱兴贝邬岚欧阳泓健
朱兴贝 邬岚 欧阳泓健


摘 要:罚函数模型计算从车辆转弯起点到转弯终点的转弯时间,作为交叉口延误阻抗的一部分,其大小直接影响着交通阻抗和交通分配的计算结构。为减小仿真中延误模型的误差,基于实际数据对货车的罚函数重新标定,得到货车在交叉口处不同车速范围内的罚函数。本文以城市连接段交叉口宁镇公路-环山路交叉口和城市一般道路交叉口江东北路-定淮门大街交叉口为例,分别标定出微型货车和重型货车2类货车的罚函数,并应用于仿真。仿真结果可以看出,新标定的货车罚函数拟合度好,对不同车辆通过交叉口的时间描述更为准确。
关键词:延误模型;转向罚函数;罚函数比较;交通仿真;回归分析
中图分类号:U491.1+23 文献标识码:A 文章编号:1006-8023(2021)04-0144-07
Analysis and Simulation Application of Turning Penalty Function
at Intersections with a High Ratio of Freight Cars
ZHU Xingbei, WU Lan*, OU YANG Hongjian
(College of Automobile and Traffic Engineering, Nanjing Forestry University, Nanjing 210037, China)
Abstract:The penalty function model calculates the turning time from the beginning to the end of the turn. As a part of the delay impedance of the intersection, its size directly affects the calculation structure of the traffic impedance and traffic assignment. In order to reduce the error of delay model in simulation, the penalty function of freight car is recalibrated based on the actual data, and the penalty function of freight car in different speed range at intersection is obtained. Taking the intersection of Ningzhen Highway - Huanshan Road and Jiangdongbei Road-Dinghuaimen Street as examples, the penalty functions of minivan and heavy truck are calibrated and applied to simulation. The simulation results show that the new calibration of freight car penalty function has good fitting, and it is more accurate to describe the time of different vehicles passing through the intersection.
Keywords:Delay model; turning penalty function; penalty function comparison; traffic simulation; regression analysis
收稿日期:2020-03-25
基金項目:国家自然科学基金项目(51408314);江苏省研究生实践创新计划项目(SJCX20-0278)
第一作者简介:朱兴贝,硕士研究生。研究方向为交通仿真、物流运输等。E-mail: 1538065932@qq.com
*通信作者:邬岚,博士,副教授。研究方向为交通规划与管理、交通仿真、智能交通等。E-mail: wulan@njfu.edu.cn
引文格式:朱兴贝 ,邬岚 ,欧阳泓健, 等. 货车高占比的交叉口转向罚函数分析及仿真应用[J].森林工程,2021,37(4):144-15.
ZHU X B, WU L, OUYANG H J, et al. Analysis and simulation application of turning penalty function at intersections with a high ratio of freight cars[J]. Forest Engineering,2021,37(4):144-150.
0 引言
由于货车身长和载重等原因,导致货车在交叉口处转向时间较长,从而对交叉口延误产生较大影响,在有货车通行的混合流仿真中,其延误结果与实际情况的误差较大,因此需要对货车的转向延误进行单独分析。目前,国外用于交叉口延误计算经典的模型是韦伯斯特(Webster)延误模型和美国道路通行能力手册(HCM)延误模型,这2种模型在过饱和状态下得到的延误预测值误差较大[1]。此外,克莱顿延误模型、哈特钦森延误模型和阿克塞立科延误模型等均是基于以上2种延误模型的改进模型[2]。国内学者的研究主要是对国外算法建立的控制效果参数模型进行改进,从而使模型能够适应中国的情况。有学者研究在不同交通条件下交叉口的延误和通行能力,如不同车辆构成、混合交通、公交优先和交通事件等情况[3-7];另外,一些学者分析了不同交通流参数对延误、排队长度的影响,如车辆构成、流量和左右转比例等[8-11]。但是在货车占比较高的交叉口仿真实验中,这些模型的应用结果与实际偏差较大,特别是货车比重较大的城市出入口的连接段道路交叉口。仿真软件中除了上述模型外,基于车辆混合比例、车速范围为方便仿真校核,常采用罚函数模型[12]。
综上所述,在交通仿真中,交叉口的延误计算适合采用转向罚函数模型。转向罚函数是转弯时间关于转弯长度的函数,用来表示交叉口对车辆转弯的延误程度,不同的转弯速度对应着不同的转向罚函数。本文根据实际调查的数据拟合得到不同速度区间内的罚函数,比较货车比重不同的两类交叉口罚函数的差异,结合拟合度与速度分布确定应用于仿真的罚函数,对罚函数进行重新标定,对比仿真后的交叉口通行时间,得到适应性效果较优的罚函数,达到优化延误模型的目的。
1 转向罚函数(Turning Penalty Function,简称TPF)
在交通仿真中,网络中每个连接器和路段都应用于计算最短路径,时间成本的计算由初始成本函数和动态成本函数决定,为优化节点处的行程时间,在默认成本函数中引入转向罚函数(TPF),使用于AIMSUN、CUBE等仿真软件中[12]。2010年《公路通行能力手册》[13]中的统计计算结果作为指定交通量的函数,来计算每个信号灯转弯的平均延误,而HCM延误模型中的补偿项由英国实验室模拟得到,考虑到行人、非机动车等因素,该补偿项在我国适用性不强。所以,优化TPF对计算时间成本和交通分配具有重要意义。本文利用AIMSUN仿真软件进行TPF的优化研究。AIMSUN仿真软件是西班牙TSS公司开发的交通仿真软件,可以适用于城市道路的仿真研究,支持对TPF的自定义功能,并提供详细的统计参数输出。在AIMSUN仿真软件中,TPF以转弯长度作为参数,考虑不同速度范围,给出的默认TPF见表1[14]。
根据《Aimsun MicroMeso Users Manual v6》[15]可知,在考虑转向成本后,连接器的初始成本将得到优化,优化后的初始成本为如公式(1)—公式(3)所示。在公式(2)中,由于小汽车与货车在车身长、载重和运行速度等方面差异较大, 在转向成本中将货车比例较大的交叉口分开计算有利于提高仿真精度。
tj(InCost)=tj(TravelFTFF)+tj(TravelFTFF)φ(1-CLj/CLmax)+τ(UserDefCost)。(1)
式中:tj(InCost)为车辆在自由流条件下在连接器j上的行程时间(h);tj(TravelFTFF)为在连接器j上的转弯时间,h;φ为容量权重参数,通常设置为5.1;C为连接器最大容量;τ(TravelFTFF)为成本权重参数;Lj为连接器j的长度,km;Lmax为连接器的最大长度,km。
tj,vt(TravelTFF)=Lsmin[Vs,vt(Limit)θvt,Vs,vt(max)]+
Ltmin[Vs,vt(Limit)θvt,Vs,vt(max)]。(2)
式中:tj,vt(TravelTFF)为在连接器上j上车辆种类为vt的转弯时间,h,在本文中主要分为小汽车与货车两类;θ为交叉口的运行等级,当θ≥1时指车辆以较大速度运行,当0<θ<1时指车辆以较低速度通行;Vs,vt(Limit)为交叉口S中车辆种类为vt的限制速度,km/h;Vs,vt(max)为交叉口S中的最大速度,km/h;Ls为交叉口S的长度;Lt为转向长度。
tj(DynCost)=tj(EstimateTravel)+tj(EstimateTravel)φ(1-CLj/CLmax+τts(UserDefCost)。(3)
式中:tj(DynCost)为连接器上j的延误时间,h;tj(EstimateTravel)连接器上j的估算行程时间,h;ts(UserDefCost)为交叉口的自定义时间,h。
2 数据调查
2.1 调查地点
为对交叉口处不同类型货车的转向罚函数展开研究,本文选取宁镇公路-环山路交叉口、江东北路-定淮门大街交叉口作为实地调查地点。其中,宁镇公路-三环路交叉口为T型交叉口,宁镇公路为双向4车道的G312国道路段,环山路为双向4车道的次干路,周边物流园区较多,重型货车产生量大;江东北路-定淮门大街交叉口为交通性干道十字交叉口,江东北路为快速路,定淮门大街为主干路,周边为生活用地。交叉口示意图分别如图1和图2所示。
2.2 调查内容
本文所调查的交叉口需要获得大量同一时刻的不同数据,工作量相对而言比较大,因此,本文采用了视频观測法,即先通过视频拍摄的方式采集相关流量信息,后期通过对视频的分析进行数据采集和数据处理。为探究货车占比对货车的TPF的影响,经过预调查观察交通组成、交通量,发现江东路-定淮门大街交叉口以蓝牌微型货车为主,大多为超市配送货车;宁镇公路-环山路交叉口以黄牌重型货车为主,由物流运输产生。由于货车车身长度对转弯时间影响较大,为标定出货车占比高的TPF模型,需要对货车进行分类。经查阅《中华人民共和国机动车登记办法》[16],货车分类见表2,在调查视频中根据车长和车牌颜色确定货车类型。
江东路-定淮门大街交叉口调查时段确定为8:30—8:45,宁镇公路-环山路交叉口选取17:00—18:00内17:00—17:15、17:20—17:35和17:40—17:55多个时段调查数据,以上时段既是城市道路通勤高峰期,也是公路物运输高峰时段,能够得到充足的调查样本,保证拟合函数的准确性。根据调查得到不同货车占比下货车的转向时间。调查参数主要包括:交通量、货车占比、平均车速、转向长度与时间、最大设计车速、车道宽度、车道数和信号相位,作为仿真模型输入量,见表3。
3 货车TPF的校正
3.1 AIMSUN仿真
将各调查参数输入AIMSUN中进行仿真,建立相应的仿真模型,通过追踪交叉口停止线前的车辆得到交叉口节点处的车辆通过时间。对仿真与实际的转向时间进行数据处理,得到不同货车占比情况下的转向时间对比,见表4。
通过对比发现,江东北路-定淮门大街交叉口处原TPF仿真结果优于宁镇公路-环山路交叉口。在微型货车占比高的江东路-定淮门大街,该交叉口的TPF与没有货车通行的城市交叉口的TPF接近,考虑到调查样本及记录误差,该误差在可接受范围内,此情况下可采用常规TPF。而在宁镇公路-环山路交叉口中,货车占比对交叉口的TPF影响较大,原罚函数对交叉口延误较大的运行情况模拟效果较差。在23.2%与38%的货车占比下,仿真得到的平均转向时间与实际误差均超过50%,需单独标定TPF;在5.6%货车占比下,误差小于20%,在可接受范围内。因此,对于宁镇公路-环山路交叉口货车占比高于20%的TPF需进行校正,以提高仿真的精确性。
3.2 货车TPF调整
在不同交叉口仿真时,车辆转弯时长与实际调查的车辆转弯时长有一定差距,需根据货车比例大小调整罚函数系数。由于因变量车辆转向车速为区间车速,计算区间以车辆车头到达停止线开始,车尾驶入出口道结束,因此无法由点速度代替,本文采用转向长度和转弯时长之比计算得到转向车速。同时以10 km/h为区间进行分类,对不同速度区间的罚函数模型进行回归分析,得到不同速度区间下的拟合函数,得到的拟合函数分别如图3与图4所示。在调查数据进行拟合时,发现由于货车自身长度、车重及饱和度等原因,通过交叉口的速度集中于10~30 km/h,实行右转的货车速度较快,而在速度区间为 V<10 km/h和V>30 km/h的数据量较小,导致回归异常而无法拟合。
在23%和38%货车比例下,10 km/h≤V<20 km/h和20 km/h≤V<30 km/h 的TPF线性系数分别为0.241 8和0.162 3、0.288 9和0.123 2。10 km/h≤V<20 km/h速度区间内的线性系数均大于20 km/h≤V<30 km/h速度区间,即转向速度越小,惩罚越显著,对延误成本影响越大;宁镇公路-环山路交叉口38.0%货车占比下TPF的线性系数大于23.2%货车占比下TPF的线性系数,线性系数与货车比例呈正相关。货车比例较大的交叉口,由于货车的车头间距一般大于小汽车,通过交叉口的车速小于小汽车,且对小汽车通过交叉口的影响较大,因此转向罚函数作用更加明显。除此之外,行人和非机动车的转向对通过交叉口时间也具有一定的影响。
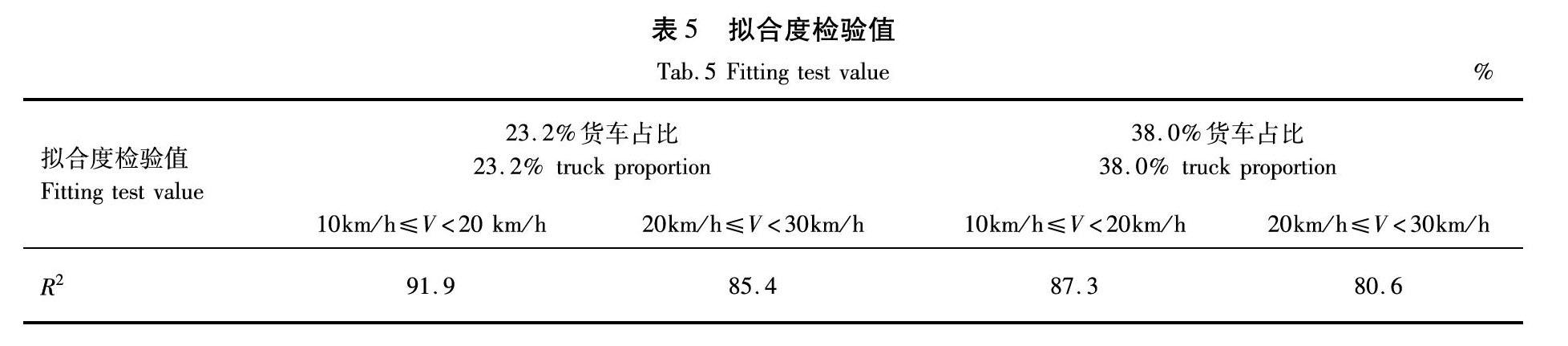
关于R2值检验回归模型的“拟合优度”见表5,各拟合函数的R2均高于80%,考虑到样本量及转弯时间的人为记录误差,拟合度较好。其中,货车占比为23.2%的交叉口在20 km/h≤V<30 km/h区间内的拟合效果最好,达到91.9%,主要由于该交叉口的转向速度大多集中于该区间,各进口道的转向车辆均有一定样本,作为自变量的转弯长度样本量较多,且在该速度区间下受非机动车的影响较小,因此拟合度最高;而货车占比为38.0%的交叉口在10 km/h≤V<20 km/h区间内的拟合效果较好,主要由速度分布决定。
由实际数据拟合得到的TPF与AIMSUN中原TPF见表6。由表6可知,随着转向速度的增加,TPF的系数与常数值也随之增大,因此货车转向速度的标定影响着TPF的选取和仿真效果。从不同速度区间内罚函数系数来看,重型货车罚函数的系数最高,其次是微型货车,均大于AIMSUN的TPF。从不同速度区间内TPF系数的变化率来看,10 km/h≤V<20 km/h与20 km/h≤V<30 km/h區间内的不同TPF系数变化率分别为33.3%、58.6%,货车占比为23.2%的交叉口与AIMSUN的TPF系数变化率相同,货车占比为38.0%的交叉口TPF变化显著,说明在重型货车比例高的条件下,当转向速度增大时,交叉口中的货车比例降低,小汽车的转向速度较货车大,因而导致20 km/h≤V<30 km/h区间内的TPF系数急剧降低。
3.3 仿真结果对比
由于货车占比为23.2%、38%的交叉口均在10 km/h≤V<20 km/h区间内的拟合度较高,车速集中分布于10 km/h≤V<20 km/h,因此分别选取T=0.27+0.24L与T=2.09+0.29L作为TPF输入。在其他仿真条件不变的情况下,对AIMSUN和调整参数后的TPF分别进行仿真实验,与交叉口实际通过时间进行对比,分析校正后的货车TPF的适用性。以宁镇公路-环山路交叉口为例,在AIMSUN中对节点进行参数设置,将节点中默认的TPF函数更换为修改后的TPF函数,随后进行仿真实验。
为进一步探究AIMSUN中校正后的TPF在不同货车占比交叉口的适用性,利用单样本KS检验分别检验2个样本是否符合正态分布,得到2组数据分布渐近著性分别为0.02、0.03,均小于0.05,即认为2个独立样本均不满足正态分布,因此选用曼-惠特尼秩和检验[17],分别对2个交叉口的实际与仿真转向时间进行假设检验。检验步骤如下。
(1)建立原假设和备择假设:H0,假设2组数据分布没有显著差异;H1,假设2组数据分布有显著差异。
(2)在显著性水平下,α=0.05下,查Za2, 当|Z|>Za2=1.96时,拒绝原假设,否则没有充分的理由拒绝原假设。利用SPSS得到曼-惠特U检验的结果见表7, |Z|均小于1.96,接受原假设,即2组数据没有显著差异,调整后的货车罚函数适应性明显改善,整体与实际数据偏差较小。
4 结束语
本文对交叉口处货车转向时间与转弯距离展开分析研究,对江东北路-定淮门大街交叉口和宁镇公路-环山路交叉口的货车转向罚函数进行了标定。研究结果表明:不同类型货车的罚函数存在差异,微型货车的罚函数系数小于重型货车的罚函数系数;根据实测数据拟合得到的罚函数在仿真中具有良好的应用,能够较为准确地模拟出车辆通过交叉口的时间。仿真中,对于不同货车比例的交叉口可以选择不同的TPF,扩充了TPF的选择范围。
【参 考 文 献】
[1]王炜. 交通规划[M]. 北京: 人民交通出版社, 2007.
WANG W. Transportation planning[M]. Beijing: China Communications Press, 2007.
[2]辛泽昊. 面向交通网络分配的交叉口延误模型研究[D]. 南京: 东南大学, 2018.
XIN Z H. Research on intersection delay model for traffic network assignment[D]. Nanjing: Southeast University, 2018.
[3]刘庆广, 顾玉牧, 林培群. 关联交叉口延误计算模型研究[J]. 重庆交通大学学报(自然科学版), 2021, 40(3): 22-26.
LIU Q G, GU Y M, LIN P Q. Delay calculation model of associated intersections[J]. Journal of Chongqing Jiaotong University (Natural Science), 2021, 40(3): 22-26.
[4]张梦凡, 韩宝睿, 杨震, 等. 平面交叉口定向匝道设置条件与技术经济评价[J]. 森林工程, 2021, 37(2): 104-109,122.
ZHANG M F, HAN B R, YANG Z, et al. Setting conditions and technical and economic evaluation of directional ramp at plane intersection[J]. Forest Engineering, 2021, 37(2): 104-109, 122.
[5]陆颖, 林丽. 基于遗传算法的平面交叉口信号配时优化[J].森林工程, 2020, 36(6): 103-109.
LU Y, LIN L. Signal timing optimization of intersections based on genetic algorithm[J]. Forest Engineering, 2020, 36(6): 103-109.
[6]张亚平, 陈烨, 祁首铭, 等.信号控制交叉口转向延误概率模型[J]. 吉林大学学报(工学版), 2020, 50(6): 2113-2121.
ZHANG Y P, CHEN Y, QI S M, et al. Model of controlled intersection turning delay based on probabilistic principle[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(6): 2113-2121.
[7]姚荣涵, 刘美妮, 徐洪峰. 信号控制交叉口车均延误模型适用性分析[J]. 吉林大学学报(工学版), 2016, 46(2): 390-398.
YAO R H, LIU M N, XU H F. Applicability analysis of vehicle delay models for isolated signalized intersection[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(2): 390-398.
[8]陳栋, 刘泽高, 贾丽斯, 等. 信号交叉口改进延误模型及实测分析[J]. 广西科学, 2015, 22(2): 231-236.
CHEN D, LIU Z G, JIA L S, et al. Improved model of delay and measurement analysis at signalized intersection[J]. Guangxi Sciences, 2015, 22(2): 231-236.
[9]王形华, 许伦辉. 汇流交叉路口车辆通行权分配方案的确定[J]. 赣南师范学院学报, 2000, 21(6): 45-48.
WANG X H, XU L H. Determining the assignment modes of vehicle traffic lights for Y-int[J]. Journal of Gannan Teachers College, 2000, 21(6): 45-48.
[10]蒋贤才, 高苏, 张龙洋. 一种改进的移位左转车道信号控制方法及其效用分析[J]. 中国公路学报, 2019, 32(9): 152-163.
JIANG X C, GAO S, ZHANG L Y. Signal control and utility analysis of an improved displaced left-turn lane[J]. China Journal of Highway and Transport, 2019, 32(9): 152-163.
[11]潘义勇, 马健霄. 随机交通网络最小期望-均方差路径问题罚函数解法[J]. 重庆交通大学学报(自然科学版), 2017, 36(4): 97-102.
PAN Y Y, MA J X. Penalty function algorithm for solving the mean-standard deviation shortest path problem in stochastic traffic network[J]. Journal of Chongqing Jiaotong University (Natural Science), 2017, 36(4): 97-102.
[12] RAHIMI M A, RAHIMI F. Traffic evaluation of SPUI and TUDI interchanges based on traffic conditions in Tehran with AIMSUN and Synchro software[J]. Iranian Journal of Science and Technology, Transactions of Civil Engineering, 2020, 44:1323-1334.
[13]美國交通研究委员会. 道路通行能力手册(HCM2010)[R]. 任福田, 刘小明, 荣建, 等译. 华盛顿: 美国交通研究委员会, 2010.
American Transportation Research Council. Road capacity manual (hcm2010)[R]. REN F T, LIU X M, RONG J, et al trans. Washington: Transportation Research Council, 2010.
[14]TSS-Transport Simulation Systems. Aimsuns macroscopic modelling manual[EB/OL]. (2021-03-03).
[15]TSS-Transport Simulation Systems. Microsimulator and mesosimulator in Aimsun 6 users manual[EB/OL]. (2021-03-03).
[16]中华人民共和国公安部GA 369-2005.中华人民共和国机动车登记证书 [S].北京:中国标准出版社,2005
Ministry of public security of the peoples Republic of China GA 369-2005. Motor vehicle registration certificate of the peoples Republic of China[S]. Beijing: China Standards Press, 2005.
[17]孙允午. 统计学:数据的搜集、整理和分析[M]. 上海:上海财经大学出版社, 2006.
SUN Y W. Statistics: data collection, collation and analysis[M]. Shanghai: Shanghai University of Finance and Economics Press, 2006.
