双电机电动助力转向系统在无人驾驶小型客车上的应用
2021-08-16张晶鑫
付 瑞,施 文,王 利,张晶鑫
(北汽福田汽车股份有限公司,北京 102200)
双电机电动助力转向系统是为满足汽车智能化的需求而开发的。它具有诸多优势,正常驾驶时能够更轻便地转动方向盘,具有随车速变助力、主动回正控制等转向特性;可以实现转向角度控制,能够实现自动泊车、无人驾驶等智能驾驶功能,同时具有电机和控制器的备份,以提高无人驾驶系统的安全性。本文以我公司无人驾驶小型客车为例,阐述其双电机电动助力转向系统的组成、功能及其应用。
1 系统的组成及功能
双电机电动助力转向系统由EPS控制器、驱动电机、扭矩转角传感器、蜗轮蜗杆减速增力机构、转向传动轴、转向器总成等组成,如图1所示。各部件的功能如下:
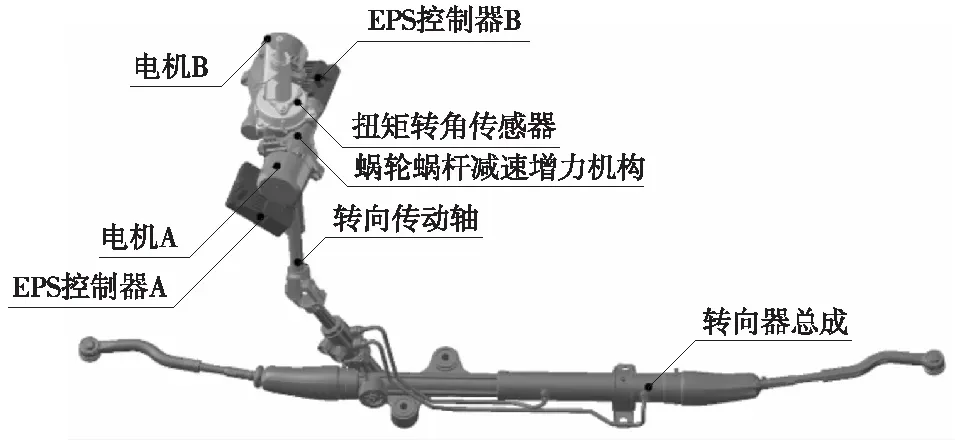
图1 双电机电动助力转向系统组成
1)EPS控制器。当汽车转向时,安装在转向管柱上的扭矩传感器会“感觉”到转向盘的力矩和拟转动的方向,这些信号通过数据线发送给EPS控制器,EPS控制器根据这些信号以及车速、电流反馈等数据进行分析判断,然后根据设定的参数向驱动电机控制器发出指令,驱动电机就会根据具体的需要输出相应大小的转向助力矩[1]。本文应用的双电机电动助力转向系统采用双EPS控制器冗余设计,提高系统的安全性。
2)驱动电机。输出助力转矩来控制转向器。本文应用的双电机电动助力转向系统采用双电机冗余设计,提高系统的安全性[2]。
3)扭矩转角传感器。感应转向轴扭矩和角度的大小方向[3]。
4)蜗轮蜗杆减速增力机构。通过蜗轮蜗杆放大输出驱动电机施加在管柱上的输入扭矩,把扭矩放大地传递到转向器上[4]。
5)转向传动轴。传递扭矩。
6)转向器总成。转向器进一步减速增矩后输出力和运动给转向桥左右两侧的转向节,使左右转向轮实现转向[5]。
2 系统在无人驾驶小型客车上的应用
2.1 系统的安装
纯电动无人小型客车可以实现正常无人驾驶和特殊情况有人驾驶的迅速切换。采用线控底盘系统,2 t麦弗逊空气独立前悬架,2.5 t板簧后悬架,电机、电控、电池三合一独立前驱动系统,采用方向盘或双电机电动助力转向系统两种转向模式(分别对应于有人和无人驾驶模式)。在保证高空间利用率的前提下实现有人和无人驾驶的并联设计[6]。
双电机电动助力转向系统在无人驾驶小型客车上的安装设计中,应确保有利于装配、拆检、保养及维修;要尽可能满足通用化、系列化的要求;应避免与牵引电机、电机控制器、悬架等发生运动干涉。其控制器接插件及传感器插件接口应留有足够空间进行线束的插接及固定。转向管柱与转向传动轴在中间位置时的夹角≤20°,转向传动轴最小长度≥170 mm。纯电动无人小型客车线控转向系统的部件包括:转向盘1、上连接件2、快拆器3、下连接件4、双电机电动助力器5、管柱固定板6、转向传动轴7、转向器总成8。如图2所示。
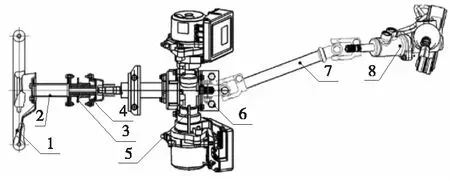
图2 线控转向系统装配关系
2.2 系统的电气控制
双电机电动助力转向系统在无人驾驶小型客车上的电气控制流程如图3所示。车辆启动后,为确保有足够的转向能力,需要确认整车电器处于正常工作状态,EPS控制器会首先读取牵引电机或“Ready”状态信号,以确认整车的工作状态信息。人工驾驶模式下,方向盘正反转动时,EPS控制器根据扭矩传感器检测到的方向盘输入扭矩和当前车速计算需要助力的大小和方向,并向助力电机发出电流指令。自动驾驶模式下,整车控制器通过CAN总线向EPS控制器发出转向角指令,EPS控制器接收指令后计算需要助力的大小和方向,并向助力电机发出电流指令。其上电和下电的工作过程如图4所示:
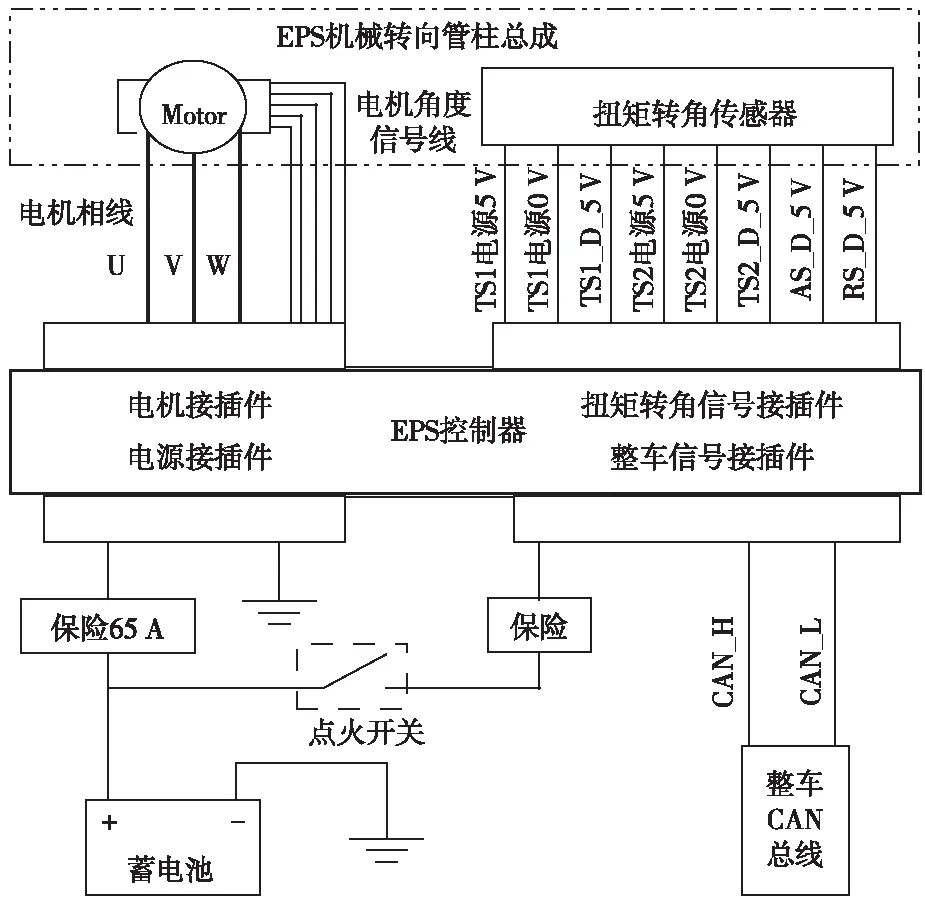
图3 电气控制流程图
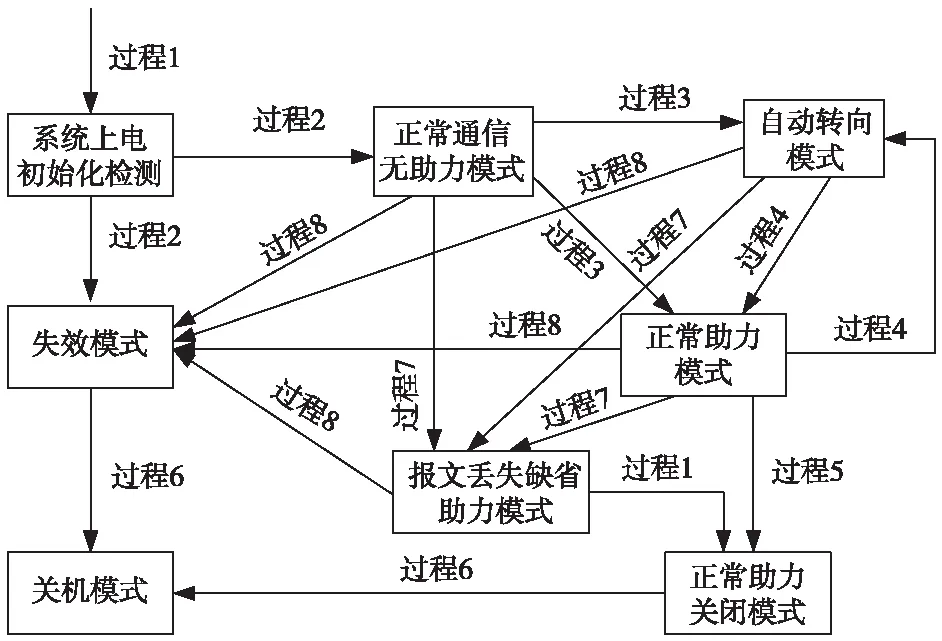
图4 供电控制图
1)过程1为启动开关打开过程。
2)过程2为EPS初始化过程。此时驱动电机不启动,如初始化过程正常则进入正常工作模式,如初始化过程异常则进入失效模式。
3)过程3为整车启动过程。驱动电机启动后,EMS(电机转速传感器)将驱动电机转速通过CAN总线发送给双电机电动助力转向系统中的EPS控制器,系统进入助力模式。
4)过程4为有人与无人驾驶转换过程。自动转向模式检测到手力介入后转换为正常助力模式,正常助力模式检测到自动转向指令后转换成自动转向模式。
5)过程5为关机过程。当车速小于5 km/h时,驱动电机关闭,双电机电动助力转向系统关机过程正常完成后,EPS控制器断电关机。
6)过程6为关机过程。
7)过程7为CAN报文丢失过程,系统检测不到CAN报文后进入报文丢失缺省助力模式。
8)过程8为故障发生过程。当系统检测到故障后进入失效保护模式,停止助力。如果控制器A系统发生故障,控制器会立即发送故障信息,同时,双电机驱动电动助力转向系统的另一台电机控制器B工作,实现对系统电机控制器的备份,提高无人驾驶系统的安全性。
2.3 控制策略
1)常规助力模式下的转角伺服控制策略。常规助力模式下,双电机电动助力转向系统的EPS扭矩控制策略如图5所示:根据车速和转向盘转矩判断车辆的行驶状态,并依据嵌入的转向助力特性曲线数据确定所需的助力大小,由目标助力进一步判断决定系统的工作模式,并需要对系统进行助力控制、阻尼控制以及回正控制,实现常规工况下转向轻便而不失“路感”。
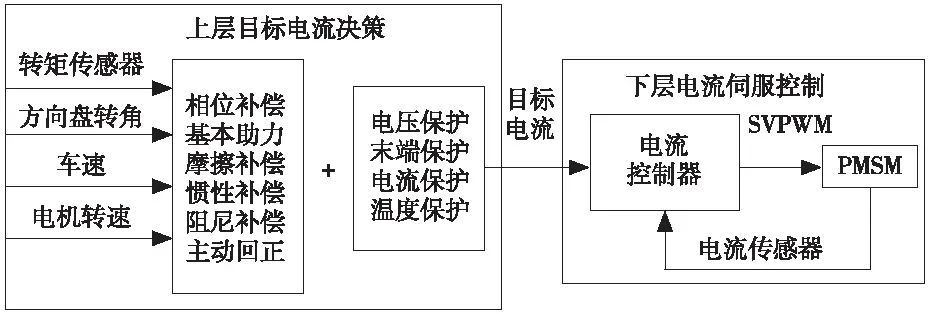
图5 常规助力模式下的转角伺服控制策略
2)无人驾驶模式下的转角伺服控制策略。此模式下的转角伺服控制是通过对电机进行运动伺服控制来实现的,如图6所示,控制系统从内到外依次是电流环、速度环和位置环。电流环是分别以电流信号作为反馈信号的控制环节;速度环是以速度信号作为反馈信号的控制环节;位置环是以位置信号作为反馈信号的控制环节。电流环中,电机的输出扭矩直接由电流决定,在自动转向系统中主要起到提高系统机械特性的作用,其反馈元件为控制器中的电流传感器;速度环在伺服系统中主要起到控制转速的作用,其反馈元件为电机的位置传感器得到的电机转速;位置环是伺服系统的位置控制单元,其反馈元件为转角传感器[7-10]。

图6 无刷电机闭环控制框图
2.4 系统的应用效果和存在的问题
对装备上述系统的实车进行测试:车辆静止状态下,通过整车控制器向EPS控制器发送自动驾驶命令使车辆进入无人驾驶模式,EPS控制器接收命令后发送转向角度阶跃指令信号,并在测试PC端应用CANoe软件收集到反馈参数如下:响应延迟时间范围≤300 ms、最大超调量10%、稳态误差±1°、转向速率0°/s~540°/s、转向精度±1°、指令周期范围≤20 ms。且平均响应速度在小角度(5°~30°)范围受系统性能影响逐渐递增;大角度(30°~360°)范围的最大转速稳定在540°/s~600°/s,转向角度控制稳定,满足无人驾驶要求。
实车测试过程中发现该EPS存在以下问题:双电机的协调同步较差;双EPS控制器在故障切换过程中会有轻微抖动冲击的现象;驱动电机(A、B)体积大所需布置空间大;单纯的复制性冗余难以规避相同的系统备份所带来的共因失效。
3 结束语
双电机EPS在无人驾驶小型客车上的试用,实现了无人驾驶的转向线控需求,满足了无人驾驶汽车转向的要求,能够在较狭窄道路上准确快速完成转向。为改善系统存在的问题,双电机电动助力转向系统将向体积小、转向冗余安全性更高的双电机双绕组方向发展。