齿轮副耦合参数对齿轮间隙非线性系统运动特性的影响研究
2021-08-01曾凡灵陆昌年
曾凡灵,陆昌年
(安徽职业技术学院 汽车工程学院,安徽 合肥 230011)
目前货车变速箱传动系统中,齿轮传动仍是最重要的动力和运动传递形式。而变速箱震动与异响是变速箱传动过程中的主要故障形式,其直接影响车辆安全性及舒适性。因此,变速箱系统的震动与异响问题仍是大家持久讨论的课题。
在变速箱工程实际应用中,由于齿轮啮合侧隙(简称侧隙)的存在,可能导致在轻载荷下系统响应波动较大的情况。因此,通常将变速箱齿轮副系统简化为间隙非线性动力系统来研究。
该动力系统不仅包含侧隙参数因素,还包含周期性变化啮合刚度、润滑系统阻尼、综合传递误差等多种参数因素,这些参数的耦合作用对齿轮间隙非线性系统影响较大。本文建立单自由度间隙时变模型,研究耦合参数对系统的影响。
1 单自由度间隙时变模型及非线性动力系统方程
针对含多耦合参数的变速箱齿轮系统,建模时我们采用了集中质量法。即系统由两个集中质量块、无质量的弹簧元件、阻尼元件组成。建模时进行如下处理:假设齿轮副系统的传动轴、支撑轴承的刚度有足够大;不考虑运动时由支承轴承所产生的摩擦的影响;齿轮之间的啮合力始终作用在啮合线方向上[1]。综上所述,单对齿轮副系统的动力学模型如图1所示。

图1 单对齿轮副系统动力学模型
其中m1,m2为主从齿轮副质量,I1,I2为转动惯量,r1,r2为基圆半径,T1,T2为扭矩,θ1,θ2为角位移,e(t)为切向综合误差,ck为啮合阻尼,fˉh为啮合位移。
引入量纲“1”化处理后,综合推导分析,含齿轮侧隙的非线性动力系统运动方程为:

其中,x是量纲“1”化处理后齿轮传递误差;ξ是齿轮副啮合阻尼比;ε是一阶谐波分量与平均啮合刚度之比;f h(x)是轮齿啮合的间歇传递函数;ωh,ωw是齿轮副系统内部和外部激励频率;φh0φw0是齿轮副系统内部和外部激励的初始相位;Fˉ,ΔF是齿轮副切向作用力平均值、波动值;e是量纲“1”化处理后综合误差[2]。
齿轮副啮合侧隙对单自由度间隙非线性运动影响较大,轮齿啮合的间歇传递函数f h(x)可表达为:
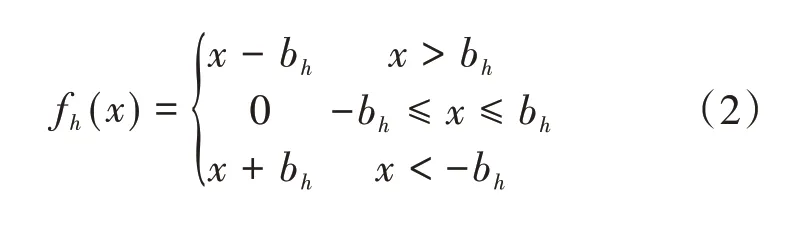
结合式(1)、式(2)分析发现,齿轮副系统方程属于多参数耦合的非线性动力系统。系统方程包含以下特点:齿轮副啮合刚度具有时变性;由传递误差引起的系统内部激励对系统产生振动影响;综合考虑了齿轮副啮合表面产生的摩擦和可变阻尼特性;齿轮副啮合传递函数具有间歇性的特征。因此,研究系统方程的参数变化对非线性系统响应的影响,找出参数之间的耦合关系,为齿轮选材、加工、装配提供理论依据是具有实际意义的。
2 非线性动力系统特性全局分析方法
非线性动力系统分析方法有全局分析法、局部分析法。其中,全局分析法主要描述随参数变化系统的整体性变化,能很好地研究参数变化对系统的影响。其中常用的方法有最大Lyapunov指数法、分岔图法,两种方法获得结果能够相互映证。
2.1 分岔理论及分叉图
分岔理论用来研究动力系统由于参数的改变而引起解的拓扑结构和稳定性变化的过程。当系统参数持续变化时,在某一数值处,系统解的拓扑结构发生突变,或定性性质发生改变,这一现象称为分岔现象[3]。
设含参数的系统为:

式(3)中,x∈U⊆R n,是系统状态变量,μ∈J⊆R m,是系统参数。当μ持续变化时,在μ=μ0处(其中:μ0∈J),系统响应的拓扑结构发生突变,即系统出现分岔。μ0为系统的分岔值,在μ∈J⊆R m的参数空间中,存在若干μ0、μ1......分岔值,这些参数集合组成分岔集。系统在x-μ空间形成的随参数μ变化的图形即为分岔图。
分岔图呈现特点为:当系统响应为n周期运动,分岔图空间显示为n条随参数变化的曲线;当系统响应为混沌运动,分岔图空间显示为随参数变化的众多数列点;若存在某分叉值μ0使得系统发生分叉,分岔图空间显示为间断性跳跃点;往往拟周期运动是周期运动向混沌运动的过渡,有些拟周期与阵发性混沌不易区分,可采用局部分析法进行具体分析。
2.2 Lyapunov指数数值计算及最大Lyapunov指数图
为了进行Lyapunov指数数值计算,将系统模型式(1)转化为状态方程,即:

在(X,Ẋ)系统状态空间中,对于数值计算的初始状态t0时刻进行极小的线扰动δX1(t0),扰动在极短时间内,随t近似按||δX1(t0)||eσ(t-t0)的规律变化,式中σ是常量,取值与初始时刻t0有关。
因为:

所以:

于是,Lyapunov指数能描述系统任意相邻轨线间的平均指数发散程度。为了获得系统的最大Lyapunov指数,只要分别计算出不同的初始时刻t0对应的σ,然后求算数平均值。
基于以上理论,实际应用时,只需在一条相轨线附近不断地进行扰动。扰动后,计算比值,则系统不稳定,此时对应最大Lyapunov指数>0;反之,比值,则系统是稳定的,对应最大Lyapunov指数≤0。因此,利用最大Lyapunov指数可以判定系统的稳定性。
研究随参数变化时的最大Lyapunov指数所获得图形,即为最大Lyapunov指数图,从该图中可观察到全局参数变化范围内的系统运动响应特征。
3 耦合参数对系统运动特性的影响分析
依据建立的齿轮副动力模型(见图1)及动力方程(式1、式2),采用全局分析方法,研究耦合参数对系统运动特性的影响。在本次研究中,将不考虑系统外载荷的周期变化,视其为某一定值[4]。无特殊要求,系统计算的初始值从x0=[0,0]T开始迭代。
3.1 载荷比对系统运动特性影响及结论
载荷比定义为:F̑=Fˉ/ΔF,它体现为系统外部激励产生的外力矩的切向作用力平均分量与内部激励引起的波动分量的比,其大小反映了齿轮副系统的承载情况[5]。通过对系统大量仿真结果的综合考虑,选择外部激励参数Fˉ=0.1不变,让内部激励参数在ΔF=0.05~0.5范围变化,则F̂=2.0~0.2;其 他 参 数 取 值:ε=0.1,b h=0.6,ωh=1.0,ζ=0.05。通过Simiulink仿真软件计算,获得系统随内部激励ΔF变化的分岔图及最大Lyapunov指数图,如图2和图3所示。通过分析图2、图3,映证两图结果特性的一致性。在ΔF=0.05~0.18范围内,随着ΔF的增加,系统响应出现周期(1、2、3、4周期)或拟周期(拟2、拟3、拟4周期)运动,且ΔF在0.1,0.15处出现周期分岔现象;ΔF≥0.18后,系统进入混沌状态,且在混沌区域0.25,0.32附近,存在较窄的稳定周期窗口。

图2 随内激励ΔF的分岔图
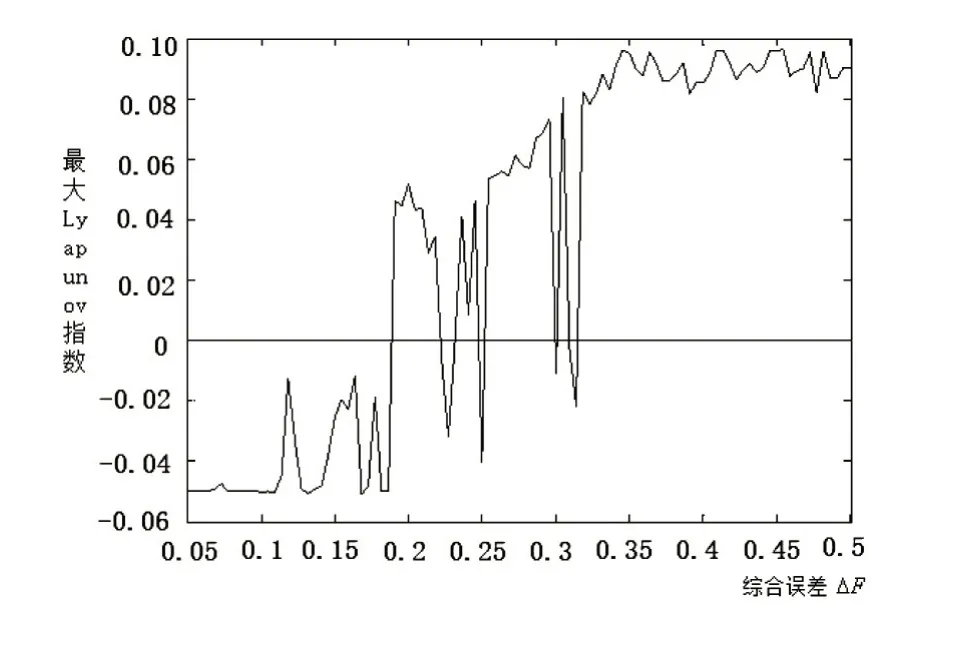
图3 随内激励ΔF的最大Lyapunov指数图
结果分析:变速箱齿轮系统在高速重载情况下,即(F̂=2.0~0.55,ΔF=0.05~0.18)系统内部激励较小,外部激励起主导作用,系统响应为稳态周期或拟周期运动;变速箱齿轮系统在高速轻载情况下,即(F̂≤0.55,ΔF≥0.18)系统内部激励较大,其起主导作用,系统响应为混沌运动,即系统出现较强烈震动现象。结果映证了变速箱在高速轻载下工作,易产生较强烈的震动,极易降低车俩的安全性及行驶舒适性。因此研究变速箱高速轻载状态下,耦合参数对系统的影响特性成为本次研究的重点。
3.2 变速箱高速轻载下阻尼比变化对系统运动特性影响
重点研究变速箱高速轻载下(其中F̂=0.5,ΔF≥0.18表示高速轻载),阻尼比变化对系统全局特性的影响。系统参数选取:Fˉ=0.1,ΔF=0.2,ε=0.1,b h=0.6,ωh=1.0,仿真系统阻尼比在ζ=0.03~0.17范围的分岔图及最大Lyapunov指数图,结果如图4和图5所示。结合图4、图5分析,在ζ=0.03~0.068范围,系统响应为混沌运动特性,但存在一ζ=0.0395~0.0475较窄范围,系统响应为多周期运动特性;在ζ≥0.068范围,系统响应为稳定的2周期或拟2周期运动特性。
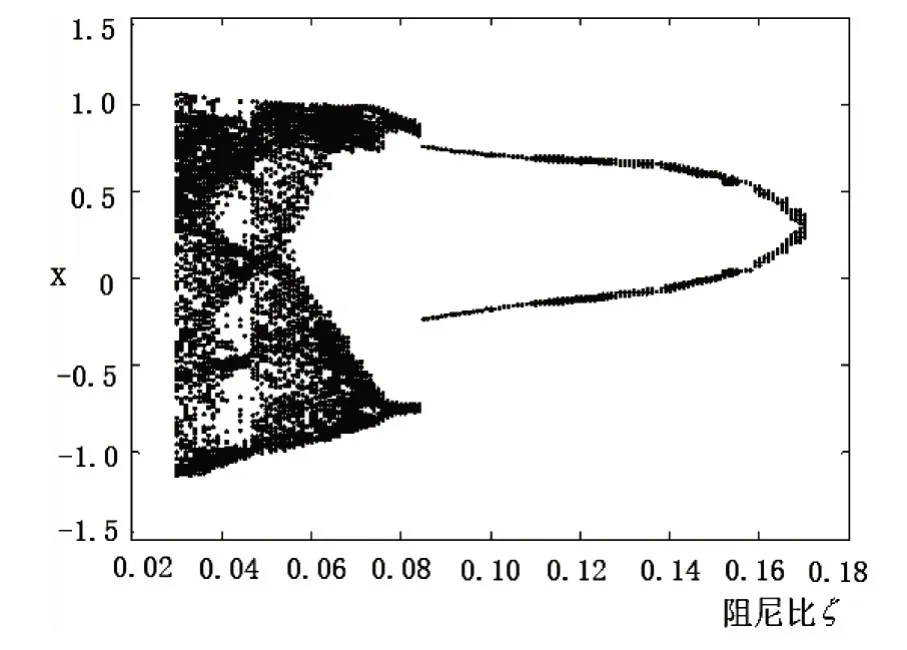
图4 随ζ变化的分岔图

图5 随ζ变化的最大Lyapunov指数图
结果分析:变速箱高速轻载下,系统选取小阻尼比容易导致箱体产生震动;选取大阻尼比,能够获得箱体的平稳运动。因此变速箱高速轻载下,增大系统阻尼比,即调整阻尼系统特性,可促进变速箱系统的稳定运动。
3.3 变速箱高速轻载下齿频比变化对系统运动特性影响
变速箱高速轻载下参数选取同前(F̂=0.5),系统参数选取:ε=0.1,b h=0.6,ζ=0.05,仿真系统齿频比在ωh=0.4~2.0范围的分岔图及最大Lyapunov指数图,结果如图6和图7所示。结合图6、图7分析,在ωh=0.4~0.865的低齿频范围,系统响应为稳定的周期或拟周期特性;在ωh=0.865~1.8的高齿频范围,尤其在ωh=1.0(即齿频等于系统固有频率)附近,系统响应全局观察为混沌特征,但在混沌区域内又存在若干个窄周期窗口;齿频在避过系统固有频率后,即ωh≥1.8时,系统响应又回归为周期或拟周期状态。

图6 随ωh变化的分岔图
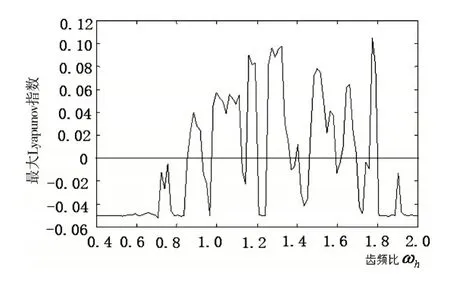
图7 随ωh变化的最大Lyapunov指数图
结果分析:变速箱系统在低齿频参数激励下或避开系统固有频率的高频激励下,系统运动响应特征均体现为稳定的周期或拟周期特性;系统在齿频等于系统固有频率附近的激励下,系统响应为混沌运动或不稳定的拟周期特性。变速箱在实际高速轻载情况下运动时,经常会出现强烈的震动或异响现象。因此,为满足变速箱系统运动的稳定性,在变速箱齿轮设计及选材时,就需要着重研究齿频如何避开变速箱系统的固有频率。
3.4 变速箱高速轻载下侧隙变化对系统运动特性影响
齿轮侧隙概念:对于圆柱直齿轮副之间的间隙,一般指齿轮齿侧之间的装配间隙。侧隙的大小,一方面是由齿轮加工的精度等级决定的,另一方面是由安装误差、热变形、磨损等因素引起的[6]。测量侧隙大小时,均指在啮合线上进行的。
变速箱高速轻载下的参数同上,系统参数选取ε=0.1,ωh=1.0,ζ=0.065,仿真系统侧隙在b h=0~1.1范围的分岔图及最大Lyapunov指数图,结果如图8和图9所示。结合图8、图9分析,b h=0~0.212范围,系统运动响应属于周期运动或拟周期特性;b h=0.212~0.355范围,系统运动响应属于混沌运动特性,但在混沌区域存在较窄的周期窗口;b h=0.355~0.492范围,系统运动响应属于周期或拟周期特性;b h=0.492~0.728范围,系统运动响应属于混沌运动特性,但在混沌区域也存在窄周期窗口;b h=0.728~1.100范围,系统运动响应属于周期运动特性。由此可见,在b h=0~1.1范围,可能是装配间隙的控制或齿侧间隙的磨损,致使侧隙b h增大;随侧隙增大,系统的响应特征为:“周期—混沌—周期—混沌—拟4周期”的交替变化,而不是直线状态变坏。
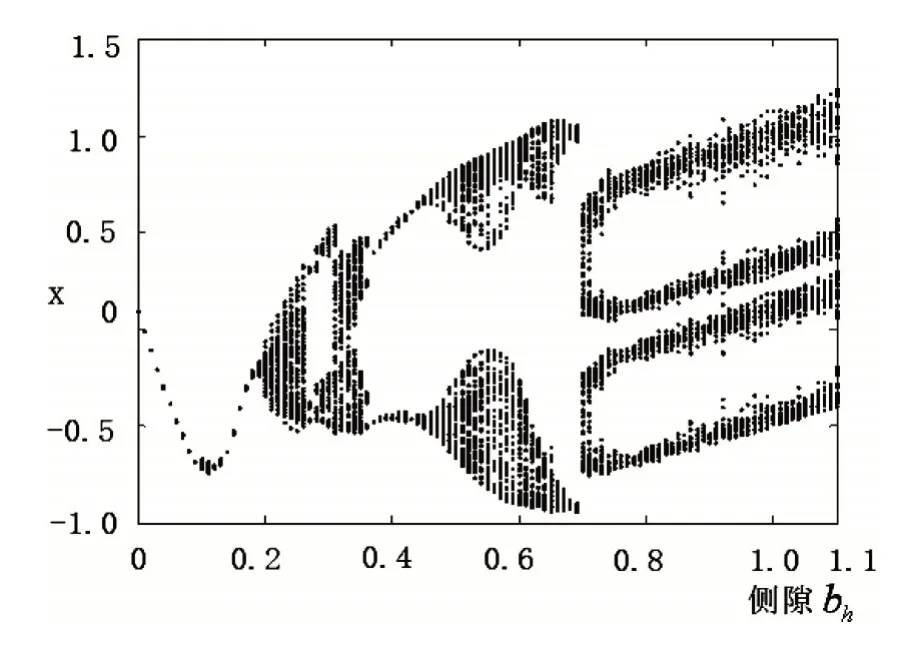
图8 随侧隙b h变化的分岔图
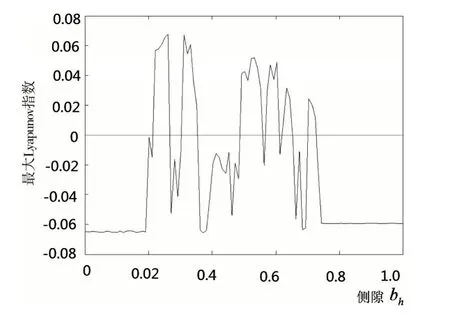
图9 随侧隙b h变化的最大Lyapunov指数图
侧隙影响结果分析:高速轻载下,侧隙数值较小时,系统运动状态为稳定的周期运动,映证了齿轮副初始装配间隙下,系统运动的稳定性;随着侧隙数值增大,系统运动状态为混沌特征,映证了齿轮侧隙磨损后,系统震动与异响增大;更大的侧隙数值,使得系统运动出现拟4周期运动,即映证齿轮侧隙磨损过大,齿轮间呈现反方向较规律的轻微碰撞[7]。这一结果验证了变速箱系统在高速轻载下,侧隙的变化对齿轮副系统的影响是强非线性的。
4 结语
变速箱高速轻载(ΔF=0.05~0.18)下,耦合参数选配在以下范围:阻尼比0.068≤ζ≤0.17,齿频比ωh=0.4~0.865,侧隙b h=0~0.212,能够保证变速箱齿轮副系统运动平稳。综合以上三耦合参数对系统的影响发现,其中侧隙与阻尼比耦合对高速轻载的变速箱影响最为复杂,选配或调控合理的侧隙和阻尼,能够较好抑制系统的震动。如果通过增加系统阻尼,则需提高变速箱齿轮副润滑系统的油压,在设计环节应予以重视;如果采用装配时控制装配间隙,则需提高齿轮加工及安装精度。
