气动网络多腔室弯曲软体驱动器结构优化
2021-07-13田德宝耿德旭刘晓敏赵云伟孙国栋
田德宝,耿德旭,刘晓敏,赵云伟,孙国栋
(北华大学机械工程学院,吉林 吉林 132021)
近年来,随着软体机器人的快速发展,作为关键部件的驱动器成为制约软体机器人发展的决定因素.由于软体驱动器本体通常全部或部分采用弹性模量较低的超弹性材料[1],因此,可实现较大幅度地伸长、收缩、扭转和弯曲等复杂运动,具有较高柔性、安全性和适应性[2-3].目前,常见的气动软体驱动器包括纤维增强型驱动器和多腔室型驱动器[4].与纤维增强型驱动器相比,气动多腔室型驱动器更易控制,能够实现复杂运动,且具有良好的弯曲特性和适应性,如应用于仿生机器人、抓持手爪和手功能康复器等装置的驱动和执行机构[4].
针对气动网络多腔室软体驱动器,许多学者做了大量研究,涉及驱动器气室数量、形状、结构、材料和功能等[5-6].新加坡国立大学机械工程系以气动网络多腔室软体驱动器为基础研究了可折叠软体机器人[7],新加坡国立大学生物医学工程系以软体驱动器为核心机构设计出了医疗康复设备[8],但目前有关驱动器各结构可用参数值及改变参数后对驱动器弯曲特性的影响仍未见有更加深入的研究.为此,本文将建立软体驱动器的形变模型,开展相关静力学试验,并采用ABAQUS软件仿真分析不同结构参数对软体驱动器弯曲特性的影响.
1 驱动器结构与功能
气动网络多腔室弯曲软体驱动器结构见图1,主要由腔室、限制层及气道组成.驱动器外形为长条状,内部为矩形薄壁网络结构,各腔室相互独立,由限制层将各腔室连接成密闭整体,腔体底部设有通气道.在气压作用下,腔室内壁膨胀变薄,在各个腔室端部产生轴向力,在限制层的约束下产生弯曲变形.
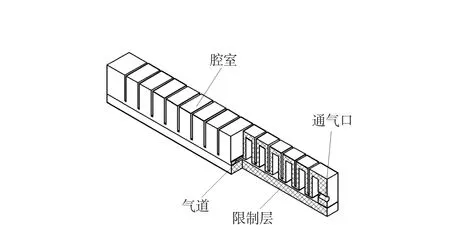
图1 气动网络多腔室弯曲软体驱动器模型Fig.1 Model of multi-chamber bending soft actuator for pneumatic network
在气压作用下,软体驱动器产生的弯曲形变主要受内部压力、驱动器长度、腔室体积、腔室间隔、限制层厚影响.驱动器内部受到的压力大小主要取决于腔室的横截面积.驱动器结构参数见图2,其中:h为腔室高度;l0为初始长度;c为限制层厚;b为腔室长度;f为腔室高度;e为腔室壁厚;a为腔室间隔;d和g分别为腔顶壁厚和端面壁厚.

图2 驱动器尺寸与结构参数Fig.2 Size and structure parameters of driver
2 软体驱动器建模
气动网络多腔室弯曲软体驱动器采用超弹性硅胶材料,形变时呈现大变形、非线性特征[9].考虑到超弹性材料的各向同性和不可压缩性,采用适于描述超弹性材料大变形的Yeoh模型建立软体驱动器的本构模型[10]分析驱动器工作状态下的弯曲特性.应变能密度函数表达式为
W=W(I1,I2,I3),
(1)
其中,
式中:λ1、λ2和λ3分别为3个方向的伸长比;I1、I2和I3为级数展开式.
由于硅胶材料具有不可压缩性,因此式(1)可写为经典的应变能密度函数两项展开式:
W=C10(I1-3)+C20(I1-3)2,
式中:C10、C20为基于Yeoh模型的材料常数.
在仅考虑软体驱动器轴向应力与应变关系时,对应变能密度函数主应变求偏导可得驱动器单轴拉伸应力与应变关系,即主应力应变t、λ1、λ2和λ3为[10]
(2)
(3)
限制层底部覆盖有不可压缩薄层,故假设软体驱动器弯曲变形后限制层底面长度l0不发生改变.在气压作用下,软体驱动器弯曲变形见图3.
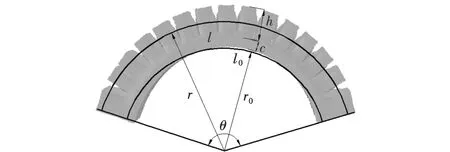
图3 驱动器弯曲变形Fig.3 Bending deformation of actuator
由图3几何关系可知,驱动器轴向伸长比,即驱动器变形后中间层弧长与底面弧长比为
(4)
式中:l为变形后驱动器中间层弧长;l0为驱动器底面弧长;r为驱动器变形后中间层弯曲半径;r0为驱动器变形后底层弯曲半径;θ为驱动器弯曲角度.
软体驱动器弯曲变形后,轴向横截面积与初始横截面积可由s=s0λ2λ3计算获得[11].依据软体驱动器截面形状构建力平衡方程,推导出主应力与驱动气压之间的关系:
(5)
将式(3)~(5)代入式(2)求得弯曲角度与驱动气压之间的关系
(6)
3 试验与仿真
不同气压下的驱动器弯曲变形见图4.图4 a为采用硅胶注塑而成的实物样机在20~100 kPa 时的弯曲变形;图4 b为利用ABAQUS软件完成的模拟仿真.结果显示:仿真结果与驱动器样机试验形变吻合.使用仿真软件对驱动器模型仿真具有可行性,可为驱动器进一步优化提供可靠的仿真数据支撑.由图4可知,驱动器具有较好的柔性,在气压作用下产生圆弧状弯曲变形,并随着气压的增加而增大.驱动器结构参数和材料见表1.
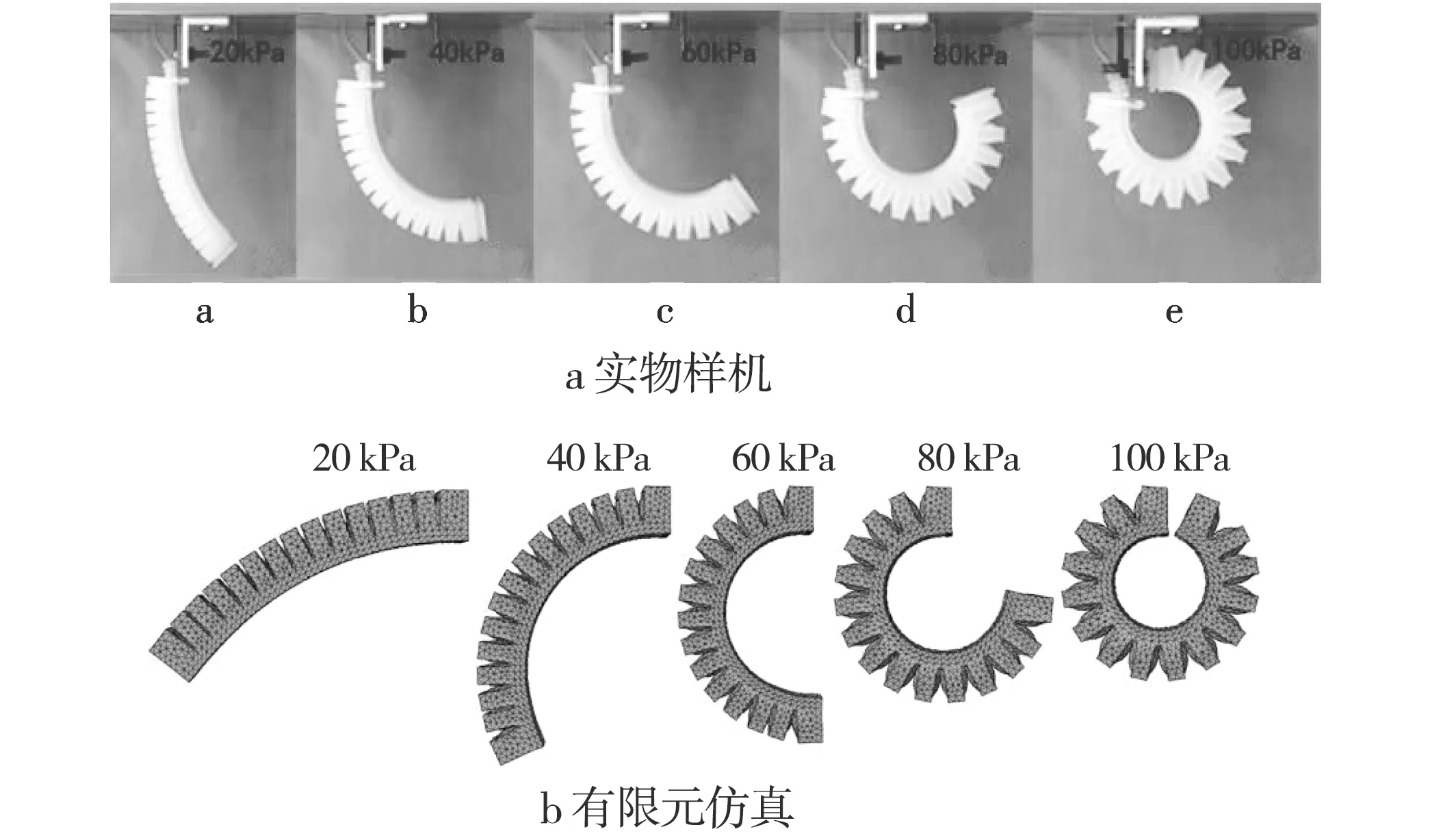
图4 软体驱动器弯曲变形Fig.4 Bending deformation of soft driver
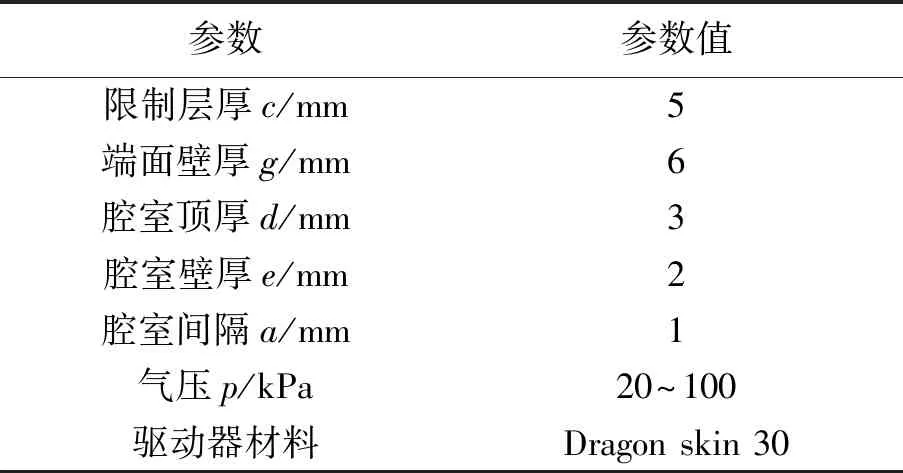
表1 驱动器几何参数Tab.1 Geometric parameters of actuator
3.1 驱动器静力学试验
通过安装在驱动器端部的陀螺仪传感器进行弯曲角度试验,见图5.将表1中的驱动器参数代入式(6)可得到柔性驱动器弯曲角度与气压的关系,见图6.由图6可见,驱动器弯曲角度随着气压的增加整体呈线性增加.比较可知,理论计算结果与试验数据和仿真结果趋势一致,吻合较好.在变形初期,硅胶材料阻滞力致使测得的试验数据偏低;当气压超过60 kPa后,试验数据高于理论计算和仿真结果;当气压达到100 kPa时,因实验台干涉,驱动器样机无法继续弯曲,试验数据低于理论计算结果.
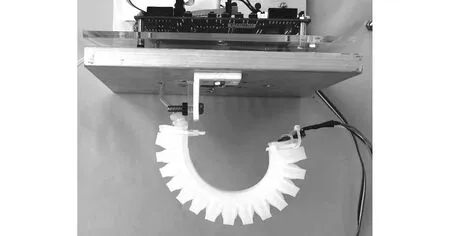
图5 驱动器弯曲角度测量Fig.5 Measurement of bending angle of actuator
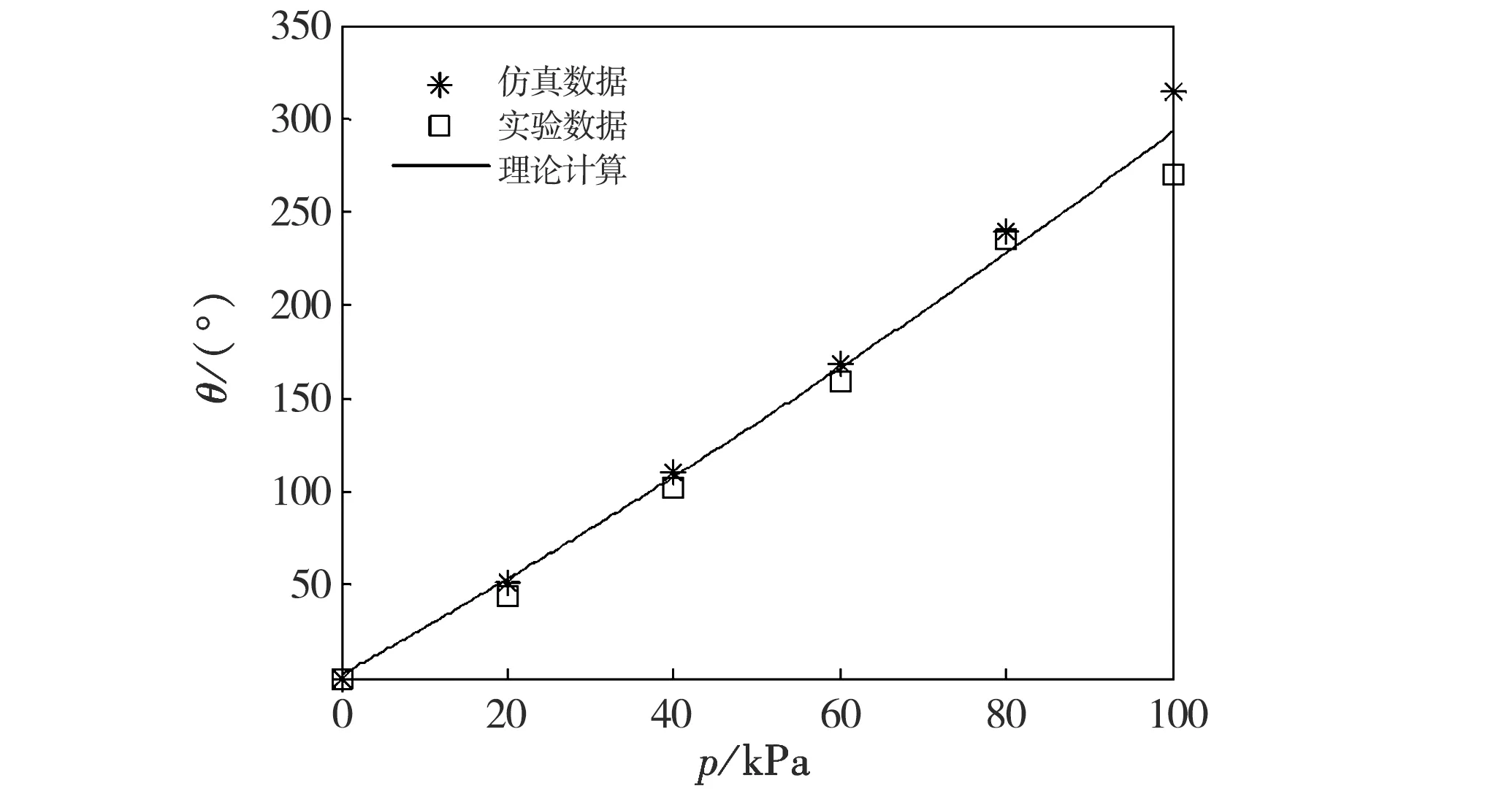
图6 弯曲角度与气压关系Fig.6 Relationship between bending angle and air pressure
3.2 驱动器结构优化
3.2.1 弯曲角度正交试验
研究驱动器结构参数对其弯曲角度的影响,设计3水平4因素正交试验,各水平参数及试验结果见表2.
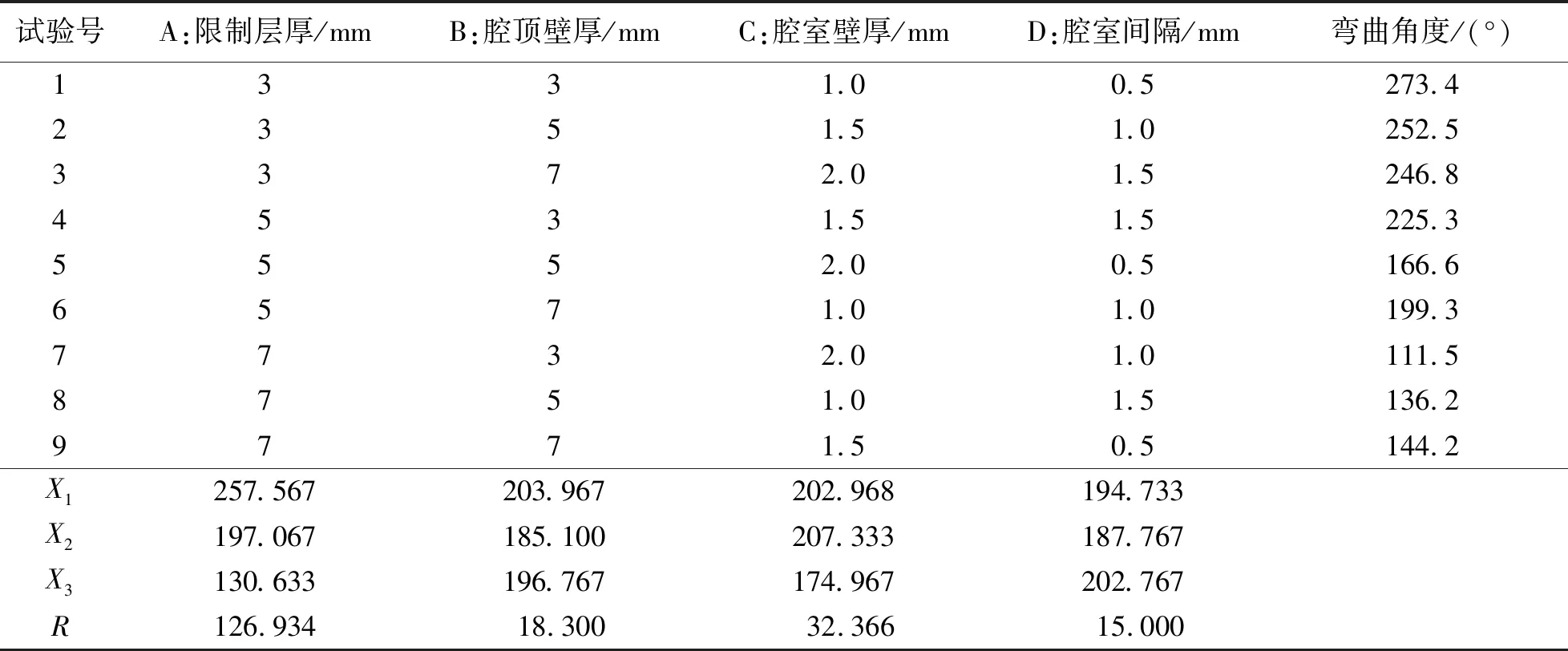
表2 弯曲角度正交试验结果Tab.2 Orthogonal test results of bending angle
本仿真试验主要获取气压p为80 kPa下软体驱动器的弯曲角度,弯曲角度越大越符合要求.由表2及图7可知:软体驱动器的最优参数为A1、B1、C2和D3,即限制层厚3 mm、腔顶厚3 mm、腔室厚1.5 mm和腔室间隔1.5 mm.在最优参数组合下可以得到最大弯曲角度,但最优参数是否能够满足软体驱动器设计要求还需进一步进行仿真研究.

图7 效应曲线Fig.7 Effect curve
3.2.2 限制层与端面壁厚结构参数仿真
采用ABAQUS对驱动器各结构参数进行优化仿真,结构参数及仿真条件见表3.
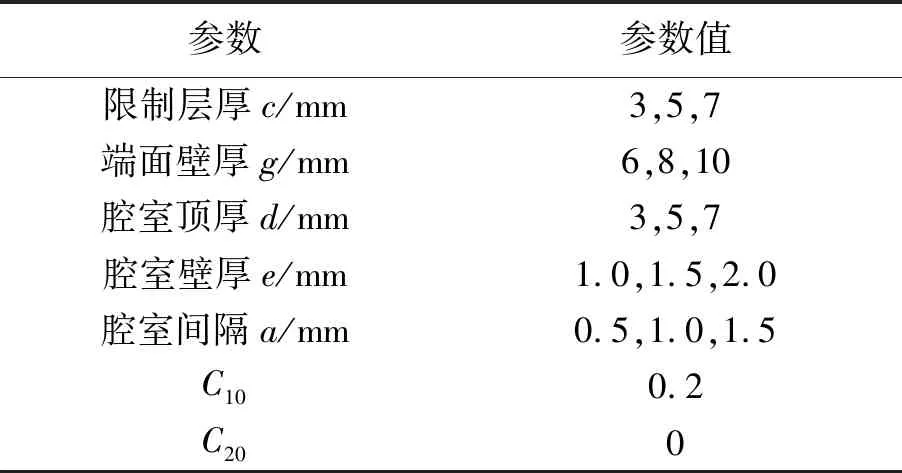
表3 仿真条件Tab.3 Simulation conditions
限制层位于驱动器腔室下侧,作用是限制驱动器轴向形变.驱动器限制层厚对弯曲变形的影响见图8.由图8可知:在腔顶壁厚3 mm、腔室壁厚1 mm、腔室间隔0.5 mm、驱动器长度139 mm和端面壁厚为6 mm条件下,驱动器弯曲角度与限制层厚成反比.当气压为80 kPa时,限制层厚为3 mm的驱动器完全闭合;限制层厚为5 mm的驱动器弯曲角度可达320°;限制层厚为7 mm的驱动器弯曲角度可达245°.随着限制层厚的增加,驱动器弯曲角度急剧减小.由此可知,限制层厚是影响驱动器弯曲角度的关键因素.限制层厚过大影响形变量,如厚度为7 mm的驱动器弯曲角度比厚为5 mm的驱动器减少了34.5%;限制层厚为3 mm的驱动器表现出比较优异的柔性,但其曲线变化非线性较强.从刚性角度考虑,如果限制层厚过小,则刚度较弱,适用性差.因此,最佳限制层厚为5 mm.

图8 限制层厚对弯曲角度的影响Fig.8 Influence of thickness of limiting layer on bending angle
设计中,驱动器端面壁厚远大于腔室壁厚,其对弯曲角度的影响见图9.由图9可知:在腔顶壁厚3 mm、腔室壁厚1 mm、腔室间隔1 mm和限制层厚3 mm条件下,端面壁厚对驱动器弯曲角度的影响较小;气压超过80 kPa后,3组驱动器弯曲变形都趋于闭合,由此可知,端面壁厚对驱动器弯曲特性影响极小.考虑材料成本及驱动器自身质量,取端面壁厚为6 mm.
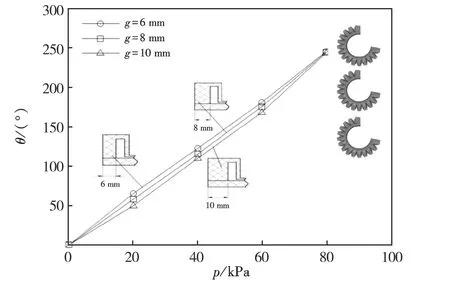
图9 端面壁厚对弯曲角度的影响Fig.9 Effect of end wall thickness on bending angle
3.2.3 腔室壁厚与腔顶壁厚结构参数仿真
在气压作用下,驱动器腔室向两侧鼓包变形(图4).腔室壁厚对弯曲角度的影响见图10.由图10可知:在腔顶壁厚3 mm、端面壁厚6 mm、腔室间隔0.5 mm、限制层厚5 mm、驱动器长度139 mm和端面壁厚6 mm条件下,壁厚对弯曲角度的影响较大,是影响驱动器弯曲变形性能的关键因素.驱动器腔室壁厚为1 mm时,驱动器弯曲角度较大,比壁厚为1.5 mm时的驱动器弯曲角度减少了17%;壁厚为1.5 mm时,驱动器比壁厚为2 mm的驱动器弯曲角度增加了28%.考虑驱动器耐压承受强度,取壁厚为1.5 mm为最佳参数.
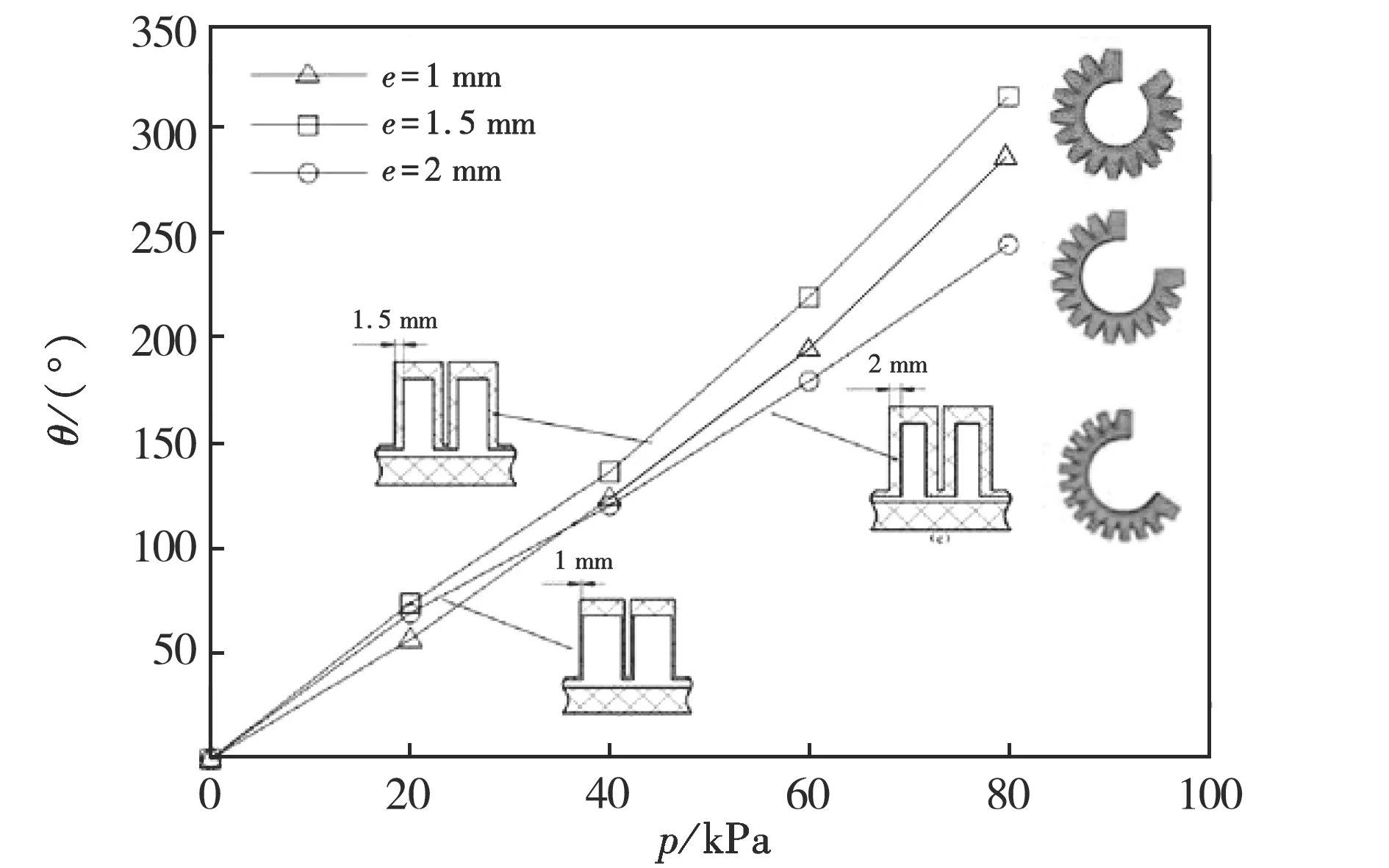
图10 腔室壁厚对弯曲角度的影响Fig.10 Effect of chamber wall thickness on bending angle
为防止腔室顶部鼓包变形,设计要求腔顶壁厚大于腔室壁厚.腔顶壁厚对弯曲角度的影响见图11.由图11可知:在限制层为5 mm,腔室壁厚为1 mm,腔室间隔为1 mm,驱动器长度为139 mm和端面壁厚为6 mm条件下,由于腔顶壁厚增加导致腔室内部受力面积减小,驱动器弯曲角度随之大幅减少,故可知,腔顶壁厚是影响驱动器形变的关键参数.腔顶壁厚为3 mm时,驱动器弯曲角度比其他两组参数分别增加了13.5%和28%.在保证驱动器腔室顶部不变形的前提下,为提高其驱动器弯曲角度,选取3 mm的腔顶壁厚为最佳设计参数.

图11 腔顶壁厚对弯曲角度的影响Fig.11 Influence of chamber top wall thickness on bending angle
3.2.4 气室间隔结构参数仿真
驱动器腔室间隔将影响驱动器的柔顺性和刚性,驱动器腔室间隔改变也影响驱动器总体长度,其对弯曲角度的影响见图12.由图12可知:在腔顶壁厚3 mm、腔室壁厚1 mm、限制层厚5 mm和端面壁厚6 mm条件下,随着气压的增大,3组驱动器最终弯曲角度相近,气室间隔对驱动器形变的影响较小.为保证驱动器的适应性和应用性,取1 mm气室间隔为最佳设计参数.

图12 气室间隔对弯曲角度的影响Fig.12 Effect of chamber spacing on bending angle
综上可知,限制层厚、腔室壁厚和腔顶壁厚为影响驱动器弯曲变形的关键因素.本文所设计的驱动器最佳参数为限制层厚5 mm、腔室壁厚1.5 mm、腔顶壁厚3 mm、端面壁厚6mm和腔室间隔1 mm.
4 小结与讨论
本文设计了一种气动网络式弯曲软体驱动器,根据Yeoh本构方程建立了该驱动器形变模型;进行不同气压下驱动器弯曲形变试验,测量弯曲角度.结果证明:该驱动器具有较好的柔性,且弯曲角度随着气压的增大呈非线性增加.试验结果验证了该理论模型的准确性和采用有限元仿真优化的可行性.
利用ABAQUS软件对驱动器各结构参数进行优化设计.由仿真分析可知:驱动器限制层厚、腔室壁厚及腔顶壁厚对其弯曲特性有极其显著的影响.驱动器最佳参数为限制层厚5 mm、腔室壁厚1.5 mm、腔顶壁厚3 mm、端面壁厚6 mm和腔室间隔1 mm.
本文采用ABAQUS软件对驱动器各结构参数进行了仿真研究,得出驱动器最佳结构参数,在此条件下可以充分发挥软体驱动器的弯曲性能.通过对气动网络弯曲软体驱动器的结构优化,验证了软体驱动器具有良好的弯曲特性和适应性,可为弯曲软体驱动器的进一步应用提供可靠的理论支撑.研究发现,该软体驱动器尚存在未充气条件下刚度不足的缺陷,在后续研究中将对此进行深入研究.
