一种气动四足直线运动的软体机器人
2017-10-21保文珵
保文珵
摘 要:本文提出了一种四足直线运动的软体机器人。首先,给出了基于气体驱动的软体机器人结构设计。然后,利用SolidWorks3D打印技术打印出软体机器人身体的各个部位模具,采用的环氧树脂橡胶材料进行填充从而获得软体机器人部件并并进行组合。最后,以针管为气体动力来源,通过实验实现了该软体机器人直线运动。
关键词:四足软体机器人;气动;3D打印
Abstract:A type of four-footed soft robot with line motion is presented using pneumatic in this paper., First of all, the structure of four-footed soft robot has been designed using gas driving.Secondly,the soft robots parts moulds are built based on SolidWorks and obtained by 3D printing technology.Then, the epoxy resin material is adapt to fill in order to obtain the soft robot parts and combine them. Finally the experiment result shows the robot can achieve liner motion by syringe suppling gases.
Key words:four-footed soft robot;Pneumatic;3D print
軟体机器人顾名思义就是一种通过研究软体动物的外貌,从而进行仿制的一种新型机器人。这种机器人不是由刚性的材料所构成,而是由可以承受大应变的柔软材料制作的,其目的就是为了让这种机器人可以做到自由的弯曲,拥有极高的自由度以至于可以轻松适应任何环境。正是因为如此,这使得软体机器人在军事,救援,医疗等方面都有着广泛的用途[ 1 ]。
目前,软体机器人的研究仍处于起步阶段,还没有成熟的理论设计方法,大多都处于结构设计与验证阶段。文[2]仿照蠕虫运动方式,设计了同时具有爬行、滚动、直立三种移动方式的软体蠕虫,并采用形状记忆合金弹簧来进行驱动。文[3]以人体体内病患处精确用药为背景,提出了胶囊类形的软体机器人结构形式来实现药物的投放,并利用薄膜材料,研制进行了相应的原理样机,开展了初步的实验。文[4]设计了多关节软体机器人,每个关节采用以电流变液驱动元件,通过电流控制电流变液来实现蠕动,关节之间通过微阀连接。Obaji[ 5 ]设计了一个具有五指机械手,采用形状记忆合金作为驱动元件,来控制握手的大小形状实现了对水杯,圆球等物体的抓取。文[6]对目前软体机器人的发展进行了总结,并指出目前软体机器人的研究重点集中在结构构型的设计和驱动方式上。
本文提出了一种采用气体驱动能够实现四足行走的软体机器人,并详细给出了其制备过程。通过针管输送气体,实验表面给四足不同气压驱动可实验软体机器人平面内直线移动。
一、四足软体机器人的结构设计
总体结构:软体机器人的形态结构往往决定了这种机器人所能运动的范围和运动的情况。
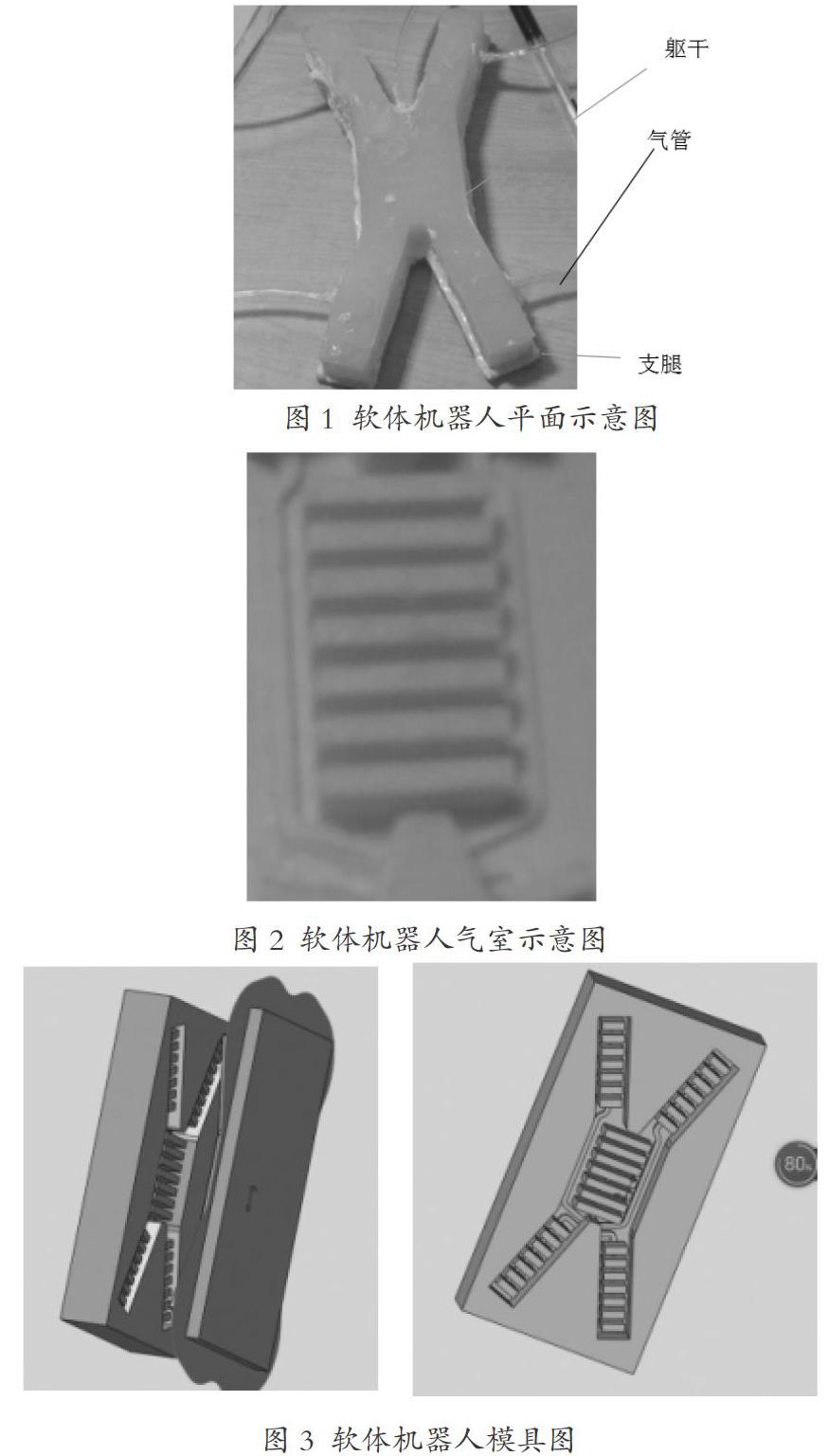
本文提出的软体机器人如图1所示:
该软体机器人由躯干、支腿和气管组成,其中躯干内部由一格一格的气室组成,如图2所示。这些气室的主要作用是储存气体驱动,帮助软体机器人运动。腿部是通过气体实现弯曲来驱动软体机器人行走。气管则是驱动气体输入的通道,用以传输软体机器人所需的能量。
二、软体机器人的制备
(一)模具制备
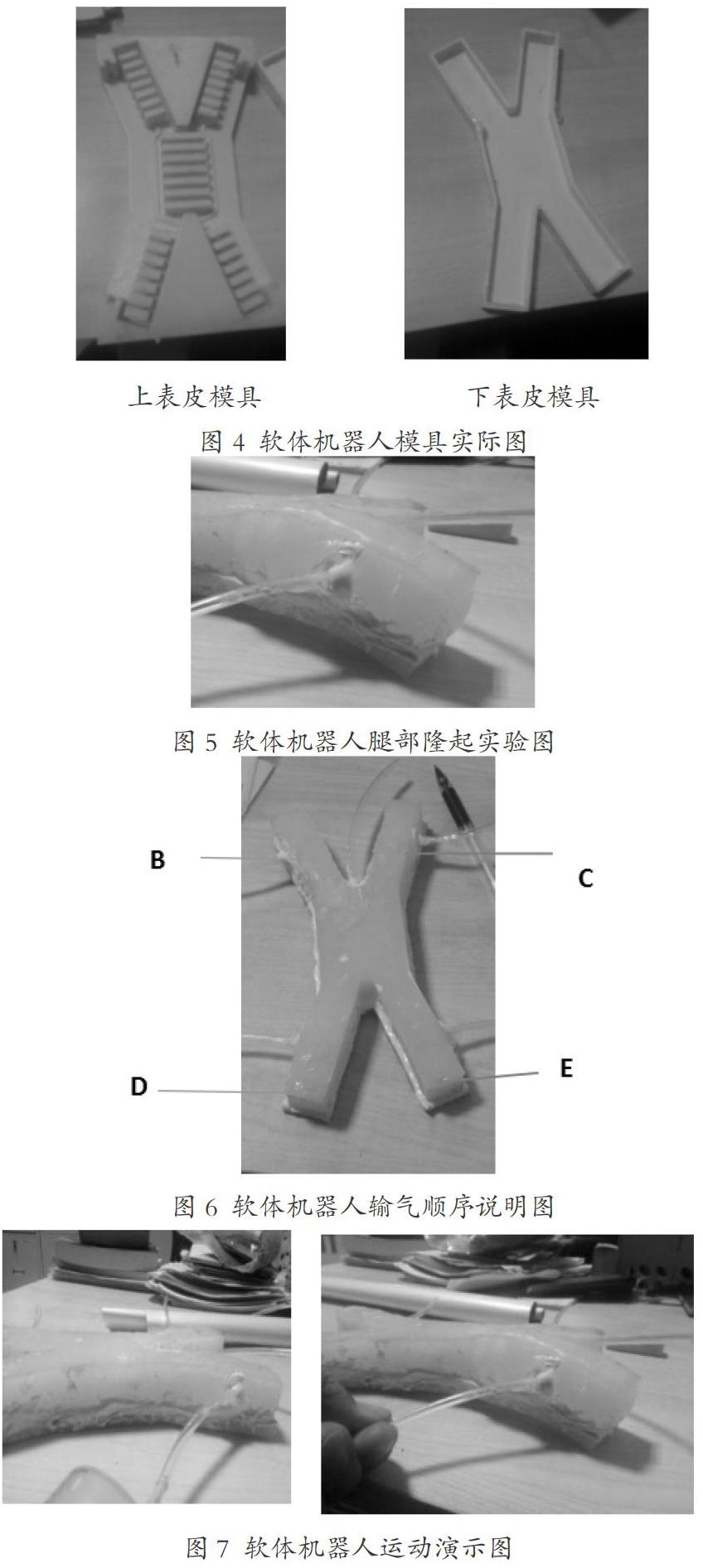
本次软体机器人制备采用了3D打印技术,包含了压层,灌胶等制作步。先通過soilworks软件来制作模具,描出各个部分具体的尺寸,并通过3D打印得出事物。在solidworks中制作的模型如下图所示:
打印之后的实物图如下图所示:
(二)灌压
本次软体机器人采用环氧树脂A、B橡胶,制备步骤如下
步骤1: 先讲A,B胶混合,用玻璃棒搅拌均匀倒入事先打印好的上表皮模具和下表皮模具2中。
步骤2:等晾干后,将两个模具取出,可以得到两个部件,并将气管贯穿在其中并排布好并用环氧树脂用AB胶将两个模具粘连在一起。
(三)气体驱动设计
为了让软体机器人可以灵活的运动,本文选择的驱动方法是运用物理针管打气进行驱动。由于在设计的时候将下表面设计的比上表面设计的要厚很多,当输入气压大于一定时,上表面会鼓起,如图5所示。支腿产生弯曲,使得物体运动。只要通过控制躯干和四肢产生弯曲的前后顺序,即可实现软体机器人行走。
三、实验
本次实验是采用5针管分别给四肢和躯干输送气体,来实现软体机器人的运动。如果要让软体机器人前行,需要首先在躯干处打起,撑起整个身体。
其次,在躯干不断气的情况下,先支腿B后支腿c充气,然后再先支腿D后支腿E充气(具体如图6所示),这样就可以实现软体机器人向前运动。
在躯干不断气情况下,反复上述充气步骤,则可实验该软体机器人连续向前。其中图7表示在反复进行上述步骤,该软体机器人从纸卷一端运动另一端的情况。
如果需要向后运动,则只用将上述步骤反过来即可。先给软体机器人的D,E脚打气,其次是A,B。
参考文献:
[1] Kyu-Jin Cho, Je-Sung Koh, Sangwoo Kim, Won-Shik Chu,Yongtaek Hong and Sung-Hoon Ahn,Review of Manufacturing Processes for soft biomimetic robots, International Journal of Precisionengineering and Manufacturing,2009,Vol.10(3):171-181.
[2] Yong Du, Min Xu, Erbao Dong, Qing Yan, Shiwu Zhang, Jie Yang, Preliminary research of a novel soft robot with three locomotion modes, Proceeding of the 2011 IEEE International Conference on Mechatronics and Automation August, Beijing, Cfhina,7-10.
[3] II-Kyun Jung, SunLim, An etherCAT based real-time centralized soft robot motion controller,2012 International Symposium on Instrumentation & Measurement,Sensor Network and Automation:117-120.
[4] A.Sadeghi, L.Beccai, and B. Mazzolai, Innovative soft robots based on electro-Rheological fluids, 2012 IEEE/RSJ International Donference on Intelligent Robots and Systems October,2012,Vilamoural,Slgarve,Portugal,7-12.
[5] Michael. O. Obaji and Shiwu Zhang, Investigation into the force distribution mechanism of a soft robot gripper modeled for picking complex objects using embedded shape memory alloy actuators,21013 6th IEEE Conference of Robotics,Automation and Mechatronics, 84-90.
[6] 曹玉君,尚建忠,梁科山,范大鵬,馬东玺,唐力.软体机器人研究现状综述.机械工程学报,2012,Vol.48(3):25-33.
