某纯电动物流车高效转矩控制算法的研究
2021-06-20刘朝吉王绍菲马巍凌张文杰李清
刘朝吉 王绍菲 马巍凌 张文杰 李清

摘 要:为了研究某种纯电动物流车转矩控制算法对汽车经济性影响,本文基于理论与试验数据,针对关键零部件建立了MATLAB/Simulink计算模型,以降低汽车系统的能耗为目标,提出了一种高效转矩控制算法。通过不同行驶工况下的仿真和道路试验进行对比分析与验证,结果表明,与原转矩分配算法相比高效转矩分配算法的系统能耗可降低5%以上。
关键词:纯电动物流车;转矩控制策略;能耗;效率
中图分类号:TP391 文献标识码:A 文章编号:1005-2550(2021)03-0073-08
Research on High-efficiency Torque Control Algorithm of a Pure Electric Logistics Vehiclec
Liu Chao-ji1, Wang Shao-fei1, Ma Wei-ling2, Zhang Wen-jie2, Li Qing2
( 1.Dongfeng Special Vehicle Co., Ltd., Shiyan 442012, China;
2. Dongfeng VASOL Motor Co., Ltd., Shiyan 442001, China )
Abstract: In order to study the influence of torque control algorithm of a pure electric logistics vehicle on vehicle economy, this paper establishes a MATLB/Simulink calculation model for key parts based on theoretical and experimental data, and proposes an efficient torque control algorithm with the goal of reducing the energy consumption of vehicle system. Through the comparative analysis and verification of simulation and road tests under different driving conditions, the results show that the system energy consumption of the high-efficient torque distribution algorithm can be reduced by more than 5% compared with the original torque distribution algorithm.
Key Words: Pure Electric Logistics Vehicle; Torque Distribution; Energy Consumption; Efficiency
刘朝吉
毕业于湖北汽车工业学院,学士学位,现就职于东风特汽(十堰)专用车有限公司,任副总经理,主要从事新能源专用车底盘设计研究。已发表论文 《纯电动物流车电机悬置支架结构优化设计》。
引 言
针对世界能源危机及环境恶化问题,发展节能环保安全的电动汽车是解决未来能源、环境问题及实现主动安全的最有效措施之一,在世界范围内得到高度重视。然而,目前纯电动汽车续驶里程短并且充电时间长成为影响其发展的瓶颈问题[1]。纯电动汽车是一个集机械、电气、控制等为一体的非线性动态系统,想要达到低能耗、低排放,设计合理的、完善的控制策略是非常重要的[6]。针对汽车控制领域,降低能量消耗的控制策略目前的研究应用主要有三种方法:
1)高效的驱动控制策略;调节控制动力系统在效率最高的区域工作,是提高整车运行效率的一种有效方法。
2)再生制动能量回馈策略;在车辆滑行或行车制动过程中,控制电机系统发电,即提供一部分制动力,又对动力电池充电,提高汽车整车能量的利用率[7]。
3)适当的降低动力输出策略;降低动力输出能力,同时也降低了动力电池放电倍率,间接增加动力电池的放电时间和放电量,从而延长车辆的续驶里程[2]。其中,再生制动能量回馈策略和降低动力输出策略研究广泛,具有充分的理论与试验数据支持,能明显取得良好的节能效果。因此,本文针对其中之一的高效的驱动控制算法进行研究。
目前,在混合动力汽车中应用控制转矩分配的方法来降低系统能耗的研究较多,通过确定发动机与电机间的转矩分配来提高车辆的等效燃油经济性[3]。而对于纯电动车辆,尤其是能耗较大的商用车的电机转矩驱动控制策略研究很少,没有针对性的理论和试验数据统计。因此,本文选取了某型号的一款广泛应用的纯电动物流车,该款物流车的动力系统采用直驱方式,因此对电机系统转矩进行有效调节和控制输出尤其是转矩优化控制即可实现功率的优化。本文通过物理模型搭建,控制策略设计,仿真验证以及真实道路试验验证等环节,验证其降低能耗的作用,从而验证了控制策略的正确性与合理性。
1 纯电动物流车整车结构
图1是本文选用的某公司生产的某型号的畅销区域短途厢式纯电动物流车,其配置参数如表1所示:
该车底盘采用6米底盘,制动系统采用液压制动方式。为了提高传动效率,便于底盘布置等,动力系统采用直驱方式,动力系统结构如图2所示(修改图2名称车辆动力系统结构图)。動力系统的三大关键部件包括整车控制器、动力电池及其管理系统、电机及其控制系统。
2 模型搭建
根据系统结构,建立控制系统模型,将目标车速与实际车速的偏差值作为输入量,驾驶员模型实时计算输出需求转矩,包括驱动转矩与制动转矩,经过整车动力学模型得到实际车速,并与目标车速比较形成闭环负反馈控制,控制系统模型结构流程图和系统仿真模型如图3所示。该仿真系统包含:驾驶员控制模型和整车动力学模型;其中整车动力学模型包含:车辆动力学模型和电池SOC计算模型。
2.1 驾驶员模型
驾驶员模型主要包括加速踏板、制动踏板、电机转速等输入变量,以及循环工况控制模型。纵向驾驶员模型用于车辆纵向速度的控制,它根据目标车速和当前车速计算油门踏板开度和制动踏板开度,输出需求转矩。如图4(a)为加速踏板开度百分比与输出要求转矩百分比的对应关系;如图4(b)为制动踏板开度百分比与输出要求转矩百分比的对应关系。
2.2 动力学模型
纯电动车在行驶过程中,满足汽车行驶动力学方程式。车辆纵向加速度与驱动力及行驶阻力的关系式(1)如下:
式中 Fdr为来自电机的驱动力, FBrk为制动系统的制动力,Fw为风阻,Ff为滚动阻力,Fslop车重在坡道方向的分力,M为汽车总质量,a为汽车的加速度。
式(2)中FBrkmax为最大制动力,ηBrk为制动踏板开度,TBrkmax 为最大制动力矩,RTire为轮胎半径。
式(3)中Fw为风阻,其与车速v、迎风面积A和风阻系数Cw有关;
式(4)中 Ff为滚动阻力,与滚动阻力系数f有关,f与车速v有关,同时车辆与路面间的垂向作用力考虑了坡度α的影响;
式(5)中Fslop车重在坡道方向的分力,与坡道α和车重mg有关。
2.3 电池模型
电池模块基于Rint等效电路模型建立,将电池等效为一个理想电压源U和等效内阻R串联而成。电池输出电压计算公式:
式(7)中Uvoc為理想电压源电压,即电池的开路电压,Rint为等效充放电内阻。
模块输入为外部需求功率P,根据此功率需求计算电池当前电流,计算公式推导如下:
由上述公式进而计算出电池电流I0:
式(8)中Uvoc和R分别为电池的开路电压和内阻,P为外部功率需求,U0、I0分别为电池的电压和电流。在充电时需求功率P和电池电流为负值,放电时需求功率和电池电流为正值。 电池模型中的SOC采用积分法计算:
式(9)中积分器初始值为InitSOC,η和CapacityBattery分别代表库伦效率和电池总容量。
2.4 能耗计算模型
在行驶工况下,系统瞬时耗能:
式(10)中T是电机输出转矩;n是电机转速;η是电机效率。其中驱动电机效率随转矩和转速动态变化,具有非线性特性。
相对于理论计算,台架试验结果更加准确,因此本次试验中建立如图5(a)所示的驱动电机效率测试台,分别测定其在不同转速、转矩下的驱动效率MAP图,其测试结果如图5(b)所示。因此,该仿真模型应用台架试验的测试结果的插值计算结果来实现仿真运行。
3 高效转矩控制策略
转矩控制是整车控制系统功能的关键控制技术之一,该技术主要是根据驾驶员的驾驶意图和整车状态,对电机系统转矩进行有效调节和控制输出[4]。如下图6所示,完整的电机转矩控制方案主要由输入信号、转矩需求、转矩算法、转矩调整以及转矩限制这几个部分组成。本节仅针对转矩算法进行研究,设计了一种高效转矩控制算法,旨在提高电机控制效率,从而降低电量耗散,提高能量利用率,从而达到节能降耗的设计目标。
3.1 转矩控制算法
设计转矩控制算法时,最关键的环节是不仅要满足驾驶员的驾驶需求,还需要制定控制策略让动力系统(主要是电机)工作在其高效区域,这样才能有效提高电机的使用效率,有效延长电动车的行驶里程。本节根据已经搭建的整车模型,电机的实时转速为输入量,通过试验测试得到的电机效率表为查表数据,根据输入量查询获取对应转速下的最大驱动力矩;而加速踏板的开度和开度的变化率,可以间接推断驾驶意图,整车控制器可以结合当前动力电池组的SOC 状态,计算得到驱动补偿力矩。详细的控制逻辑为整车控制器根据辨识的意图选择最佳的驱动模式,计算出对应的驱动电机转矩负载系数,然后得出满足驾驶员驾驶需求的驱动力矩值,最后通过总线将该需求指令发送给电机控制器,完成驱动策略控制指令的输出。在实际制定电动车的控制策略时,受到多方面条件的制约,首要原则之一就是在车辆及各子系统性能限制条件下,安全高效地进行驱动力矩的控制。转矩控制算法流程图见图7:
如图7所示,高效转矩算法首先根据当前MCU 输入转速进行电机效率MAP三维曲面的转化,转化为对应固定转速的二维曲线,得到转矩与电机效率的对应关系。其次根据线性差值法计算,可以得到该曲线上的最高效率点ηmax,以及对应的最大效率转矩T1。最后根据当前电机转矩T,计算出该曲线上对应的电机效率点η,对比实际效率η与最大电机效率ηmax。若相等,则不进行任何转矩补偿,输出补偿值为0。若不相等,则计算补偿值△T=|T- T1|,并判断T与T1之间的关系,若T> T1,则输出T2=T-△T;若T< T1,则输出T2= T +△T,最后转矩平滑处理后,输出给MCU。
在转矩控制算法中,针对电机效率的计算方法使用的是线性插值法,对电机效率MAP表的插值。电机效率MAP图表是电机在驱动电机效率测试台上真实测试的结果,见2.4节。因此,当测量值是准确的,没有误差时,采用插值法是最快捷准确的。插值是离散函数逼近的重要方法,利用它可通过函数在有限个点处的取值状况,估算出函数在其他点处的近似值。计算x点的插值时,只用到x左右的两个节点,计算量与节点个数n无关。例如在两点[xi-1,xi]上线性插值函数如式11所示:
3.2 转矩平滑处理
对于纯电动物流车的转矩变化而言,当增加转矩补偿或者加速踏板开度变化较大时,会由于电机驱动转矩的突然增加或减小给车辆带来一定的冲击,影响驾驶舒适性及动力部件的使用寿命。为了保证转矩的平稳过渡,提高舒适性,根据对车辆加速度变化率限制进行电机转矩平滑处理[5]。加速度变化率小于等于m/s3,具体的公式推导如式12所示:
其中,a为加速度,单位m/s2;v为车速,单位m/s;m为整车质量,单位kg;r为车轮半径,单位m;η为系统传动效率;T为电机输出扭矩,单位Nm; i为传动系变速比。由于整车控制器采样周期Dt为10ms,同时将整车参数带入式,可以得出扭矩变化率的上限DT,如式13所示:
行车过程中,将需求电机转矩T2与上一时刻电机输出转矩T1对比,计算变化量DT,如式14所示,根据变化量对进行修正,得到修正后的需求电机扭矩,如式14所示,并将Tout 发送给电机控制器。
通过Matlab仿真得到的转矩平滑处理结果如图8所示,该转矩变化率明显趋于平缓。
4 模型仿真及整车试验
4.1 路试及模型仿真
将纯电动物流车道路真实路试数据进行采集,主要是电机的转速、转矩以及加速踏板、油门踏板等数据信息,收集固定路线的道路路谱数据。本小节根据实际道路试验采集到的数据作为数据源进行仿真,验证上一节中的高效转矩控制策略是否有效的提高了电机实际效率,将仿真前后的数据进行对比统计,得到策略的验证结果。
在30km/h平均车速下(由于城市道路限行因素,车辆在市内道路行驶的平均车速接近30km/h),进行道路能耗试验,现场试验图如图9所示:
根据上述所建立的分布式电动汽车的控制模型,包括駕驶员模型、转矩分配模型和整车动力学模型等,利用MATLAB/Simulink进行固定比例分配转矩的控制策略仿真,模型参数见表2所示:
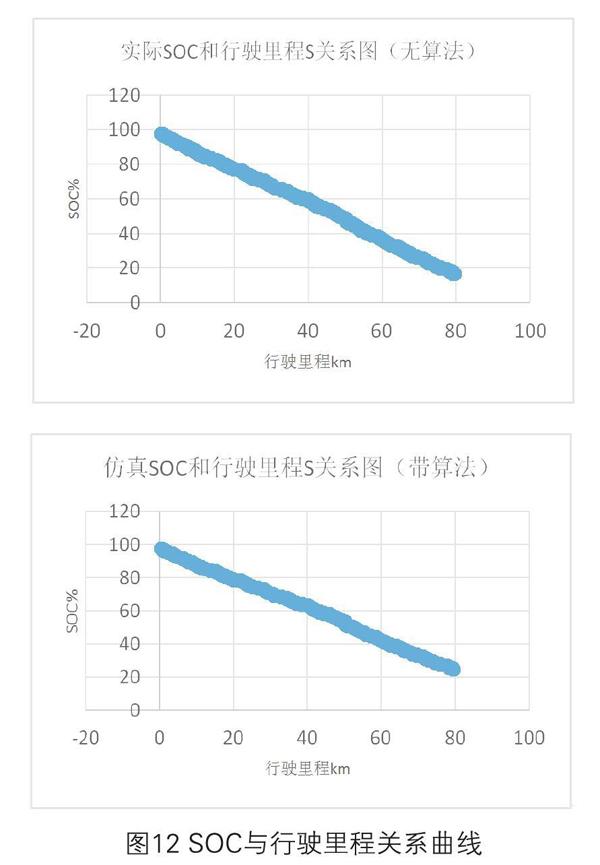
通过路试试验获取相关能耗及电机效率等数据,同时与仿真结果比较,参见表3 、图10、图11与图12:
图10为整车试验获取的实际电机效率及模型仿真后的电机效率散点图,将电机的转矩转速散点图与电机台架试验的MAP曲线的横纵坐标重合,即获取电机实际效率分布情况。如图10所示,带算法仿真后的电机效率点更多的分布在电机MAP图的高效区间。如图11所示,电机效率分布对比图更清晰的表达了电机效率的提高。如图12所示,相同行驶里程的情况下,仿真曲线SOC的变化率更小,行驶能耗更低。针对路试结果的模型仿真,本节得到该算法的真实有效性,获得有效的电机效率提升,因此下一节进行实际路试对比试验,进一步验证算法的有效性。
4.2 路试结果分析
选取一段固定的城市道路和同一位驾驶员,采用带算法和不带算法两种控制策略,应用在满载的纯电动物流车上,进行路试对比。经实车路况得到结果为应用算法试验结果和不使用算法能耗试验对比结果如表4所示:
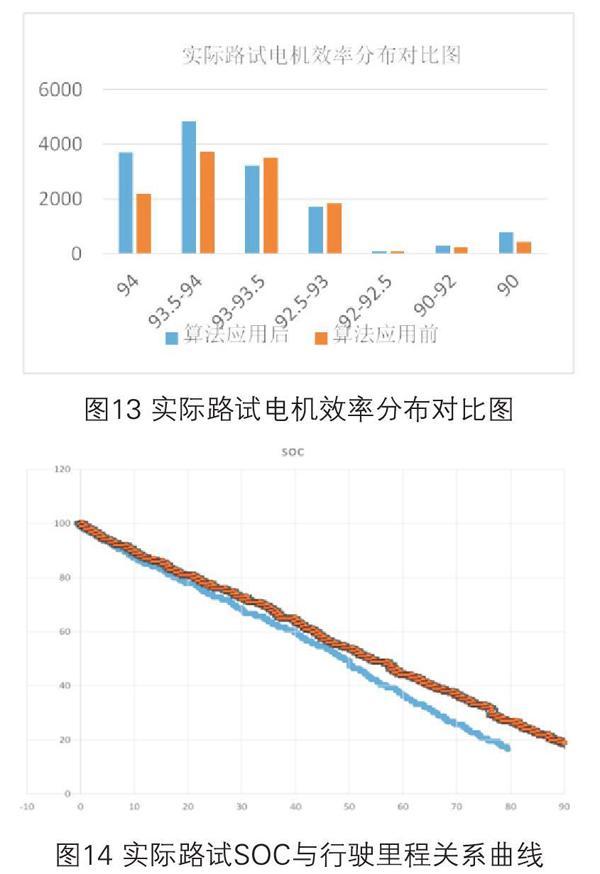
在平均车速30km/h条件下,进行百公里能耗试验,与前面不用该算法的百公里能耗相比,节能10%以上。实际路试电机效率分布对比图见图13,实际路试SOC与行驶里程关系曲线见图14:
整车路试的结果如图13所示,带算法的路试结果显示电机效率点更多的分布在高效区间。如图14所示,相同的SOC变化率情况下(100%--16%),带算法的路试结果的行驶里程接近90km,不带算法的路试结果的行驶里程接近80km,因此应用算法的条件下,整车的行驶能耗更低。因此本轮路试进一步验证了该高效转矩算法的有效性。
5 结论
本文完成了以下工作:(1)建立了考虑驾驶员模型、动力学模型、电池模型和能耗模型的纯电动汽车能耗模型,并通过仿真分析和真实路试试验对比,验证了模型正确性。(2)提出基于电机效率MAP优化的转矩控制算法,在电机转矩约束条件下,根据行驶工况,实现了驱动系统效率最优的转矩输出,有效降低了系统能耗。(3)提出通过在线查表法实现驱传动系统效率优化,具有算法简单、实时性强的特点。最终,经过模型仿真验证算法的可靠性、经过实车路试验证算法的有效性,最终得出了该算法可以大幅提高电机的使用效率,有效的增加车辆的行驶里程,实现了论文最终的研究目标。
参考文献:
[1]罗勇,刘莉等.纯电动汽车驱动控制策略研究[J]. 重庆理工大学学报(自然科学),2019,33(3):07-14.
[2]王圣海.纯电动城市客车驾驶行为与能耗关系统计分析[J].客车技术与研究,2020,(2):60-62.
[3]隋允康.建模变换优化—结构综合方法新进展[M].大连:大连理工大学出版社,1996.
[4]罗润,牛志刚.基于模式识别的纯电动汽车驱动控制策略[J].机械设计与制造,2020,(11):37-41.
[5]宋强,万海桐,米玉轩,叶山顶.纯电动汽车加速过程中的驱动转矩优化控制策略[J].江苏大学学报(自然科学版),2017,38(01):1-6.
[6]喻碧怡,纯电动汽车驱动转矩控制策略研究[J].《湖南大学硕士论文》,2018.
[7]吴为理,插电式混合动力汽车动力耦合系统设计及应用研究[J].《华南理工大学硕士论文 》, 2012.
