双驳半主动升沉补偿及其在“世越”号打捞案例中仿真应用研究
2021-06-16张峰瑞侯交义李人志宁大勇弓永军
张峰瑞,侯交义,李人志, 宁大勇,弓永军
(大连海事大学 船舶与海洋工程学院,辽宁 大连 116000)
引言
随着海上运输业、工业等领域的充分发展,发生海上事故的风险也在不断提高,受到海上风浪与海水深度的制约,通常情况下打捞一艘大型沉船极为困难,为此,考虑将升沉补偿技术应用于大型船只的打捞中。
升沉补偿技术最早在20世纪70年代被提出[1],用于改善由海浪造成的母船运动对所提升负载的影响。升沉补偿系统可分为被动式(Passive Heave Com-pensation,PHC)、主动式(Active Heave Compensation,AHC)和半主动式(Semi-Active Heave Compensation,SAHC)三种。PHC系统承载力强但是补偿效率不高;AHC系统补偿效果好,但承载能力弱,且需要较大的供能设备;而SAHC系统结合两者优势,兼具大承载力和高补偿效率[2]。目前升沉补偿技术已取得一定研究和应用,HUSTER等[3]使用PHC系统投放和回收ROV,补偿效率68%;DO等[4]设计了一种基于干扰观测的AHC非线性控制器;QUAN等[5]在实验水池模拟深海ROV在不同深度下缆绳柔性对PHC和SAHC的拉力与位移影响;宋豫等[6]针对大吨位波浪补偿系统的相应滞后问题,提出了船用起重机SAHC系统的多状态反馈复合控制方法。然而,大吨位打捞工作通常需要多缆多船协同提升,升沉补偿的应用还相对较少。2001年核潜艇“库尔斯克”号打捞采用了26组液压同步提升AHC系统,通过船体倾角控制液压缸补偿提升钢缆的恒拉力[7];2017年采用PHC方案完成打捞的韩国“世越”号沉船[8],侯交义、张增猛等[9-10]仿真研究了沉船提升PHC系统的补偿特性,并设计了一种沉船同步提升升沉补偿试验平台。目前SAHC技术还没有应用实例,考虑其出色的补偿效果与承载力大等优点,SAHC技术将会用于某些安全性和稳定性要求更高的大吨位打捞工作中。
本研究建立了SAHC液压系统、柔性缆绳与沉船负载间的耦合系统数学模型,推导了各吊点补偿量,并基于韩国“世越”号打捞案例,仿真模拟同等条件下SAHC系统的补偿效果,研究了多组半主动升沉补偿装置协同悬吊沉船时,系统的负载特性和补偿效果。
1 “世越”号打捞系统
韩国“世越”号客船沉没于2014年,2017年由上海打捞局完成打捞工作。船长为145 m,宽为22 m,型深为14 m,事发地点水域深度约为44 m。综合考虑沉船强度和水域状况,实际采用PHC系统的双驳抬吊实施打捞。事实证明,PHC系统有效缓冲了抬浮驳船运动导致的变动负载力,为“世越”号平稳提升发挥重要作用。
“世越”号采用双驳抬吊打捞方法,如图1所示,两艘抬浮驳船与沉船通过66根起吊钢丝绳连接(每侧33根)。钢丝绳下端连接事先铺垫在沉船底部的33块托底钢梁,上端连接多股钢绞线,钢绞线与PHC提升装置相连。“世越”号打捞的提升系统为66组带有PHC的同步提升液压缸。
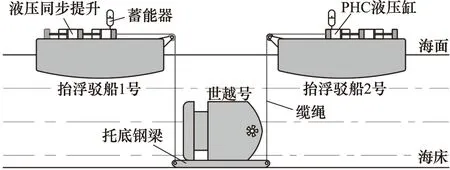
图1 双驳PHC打捞“世越”号示意图
打捞开始时,先对各提升液压缸同步加载至预设载荷,再对各吊点单独加力直至沉船完全离开海床,此后保持载荷同步提升。打捞过程将沉船从44 m水深提升至出水13.5 m,实际离底重量8500 t,实际出水重量11500 t。为减轻“世越”号整体起吊重量,事先对其安装内气囊和外置浮筒,增加约3100 t的额外浮力[11],实际打捞时3艘船舶的参数见表1。

表1 “世越”号沉船及双驳船实际参数
本研究使用SAHC系统替换实际打捞中的PHC系统,参考3船实际尺寸、质量与水深,对沉船离底后水下悬挂阶段进行建模与分析。
2 双驳SAHC系统数学模型
2.1 SAHC液压系统
本研究SAHC系统构成如图2所示,分为主动补偿器(AHC部分)、被动补偿器(PHC部分)以及刚性连接件3部分。两补偿器采用非对称液压缸并联承受负载力。AHC部分通过电液伺服阀驱动液压缸运动实现位移补偿,PHC部分的无杆腔连接蓄能器,蓄能器初始压力为负载的平衡压力。仅研究补偿系统的负载特性,故本研究忽略负载提升部分。

图2 半主动升沉补偿系统
1) AHC部分
主动补偿部分主要由伺服阀和双作用液压缸组成。以阀芯正向开启为例,AHC缸伸出时,无杆腔进油,有杆腔回油,则液压缸的负载压力:
(1)
式中,FAHC—— AHC缸负载力
A1—— 无杆腔面积
p1,p2—— 分别为无杆腔和有杆腔的油液压力
n—— 比例系数:
(2)
式中,A2—— 有杆腔面积
Q1,Q2—— 分别为AHC缸进油与回油流量,也是伺服阀两阀口流量
(3)
式中,Cd—— 阀芯流量系数
w—— 伺服阀阀口面积梯度
uv—— 伺服阀口开度
ps—— 系统供油压力
ρ—— 油液密度
联立式(1)~式(3),则AHC缸两腔压力可通过负载压力与油源压力表示为:
(4)
以上为阀芯正开情况,阀芯负开时的推导过程类似,此处不再推导。则根据油液流动的连续性方程,AHC缸的运动速度为:
(5)
其中:
式中,xAHC—— 液压缸活塞杆位移
V—— AHC缸总油液体积
βe—— 油液的有效体积弹性模量
Ct,Ci—— 分别为由压力引起的AHC缸内外泄漏系数
2) PHC部分
当PHC系统单独使用时,其蓄能器类似非线性弹簧,缓冲负载力。而在SAHC系统中,蓄能器的主要作用是平衡静止状态下的负载力,减小AHC缸受载。在打捞工作进行前需要对蓄能器预加一定的初始压力,该初始压力应与缆绳上的负载相平衡,即:
(6)
式中,Gw—— 沉船的水下重量
Ax—— 与蓄能器相连PHC缸的补偿腔面积
系统工作时,AHC缸进行位移补偿,PHC缸杆被AHC缸带动,离开平衡位置,蓄能器气体的体积变化量为:
ΔV=AxxAHC
(7)
(8)
式中,V0为蓄能器中气体初始体积。
联立式(6)~式(8),可得工作状态下PHC缸承载力随AHC缸补偿量变化公式:
(9)
3) SAHC系统负载力
由SAHC系统示意图4所示,刚性连接块承受来自缆绳、AHC和PHC 3部分的合力作用,由于PHC缸抵消大部分缆绳负载力,可得AHC系统的主要负载力为:
FAHC=FL=Ft-FPHC
(10)
式中,Ft为缆绳拉力。
联立式(5)、式(9)、式(10),可得SAHC位移补偿量与阀芯开度、缆绳负载力间的微分方程:
(11)
2.2 负载运动
由于水下沉船受不均匀拉力作用,会产生6个运动自由度,为简化模型,只考虑幅度较大的升沉、横摇和纵摇3个运动自由度,如图3所示。

图3 沉船水下受力与运动姿态
1) 沉船升沉动力学建模
当仅考虑沉船的升沉运动,沉船受到66根缆绳竖直向上的拉力、自身重力、海水浮力和升沉水阻力的合力作用,如图4所示。根据牛顿第二定律,沉船重心的升沉方向加速度为:
缺点:①由于计算量很大,ACC控制盘核心CPU要求较高,必须选择大型PLC(如三菱Q系列、西门子S7-400系列等)。②PLC作为一个控制装置,在逻辑控制方面较有优势,但是在数据运算中功能没有DCS强大;运算部分的个别功能,需要设计专门的逻辑功能块来实现[4]。③人机界面增多,在中央控制室高度集中的情况下不便布置,不够简洁,影响集控室的美观度。
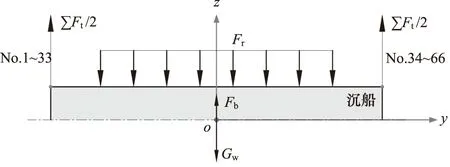
图4 沉船升沉运动受力
(12)
式中,hw—— 沉船重心升沉位移
Fti—— 各吊点所受拉力(i=1,2,…,66)
fb—— 沉船受海水浮力
fr—— 沉船受海水绕流阻力
mw—— 沉船质量
g—— 重力加速度,取9.8 m/s2
沉船升沉运动时受海水的绕流阻力:
(13)
式中,CD—— 绕流阻力系数,取2
ρ—— 海水密度,取1025 kg/m3
S—— 船的迎流面积,近似取沉船水平截面积
2) 沉船横摇、纵摇旋转动力学建模
使用欧拉角法描述沉船的空间转动,旋转次序为先横摇后纵摇。定义沉船第i个吊点位置,以沉船重心为原点的坐标表示为:
P0i=[x0iy0iz0i]T
(14)
则沉船发生空间转动后,任意吊点的新坐标为:
Pi=Ty(θy)Tx(θx)P0i
(15)
式中,P,P0—— 分别为任意空间点经旋转变换的新旧坐标
Tx,Ty—— 分别为横摇和纵摇的变换矩阵
其表示为:
(16)
(17)
式中,θx,θy分别为横摇角与纵摇角,(°)。
由于所有缆绳足够长,假设各缆绳始终沿竖直方向拉动沉船,忽略缆绳的偏转。则沉船上的任意吊点的拉力将会在沉船重心产生空间力矩:
(18)
式中,OPi—— 拉力作用点对沉船重心的矢径
Fi—— 该点的拉力矢量
xi,yi,zi—— 分别为吊点到沉船重心的距离分量
根据叉乘准则,第i点拉力对沉船重心的横摇与纵摇分力矩Mxi和Myi分别为:
(19)
则沉船受全部缆绳合力产生的横摇与纵摇转动角加速度分别为:
(20)
式中,Mrx,Mry—— 沉船横、纵摇转动水阻力矩
Jx,Jy—— 分别为沉船横摇和纵摇转动惯量
沉船转动时所受水阻力矩,可通过对各回转半径处所受水阻力(式(13))积分获得。简化沉船为一长方体,如图5所示,水阻力在沉船上下和左右迎流半表面成对产生,以沉船上下迎流面为例,可推导水阻力矩公式为:
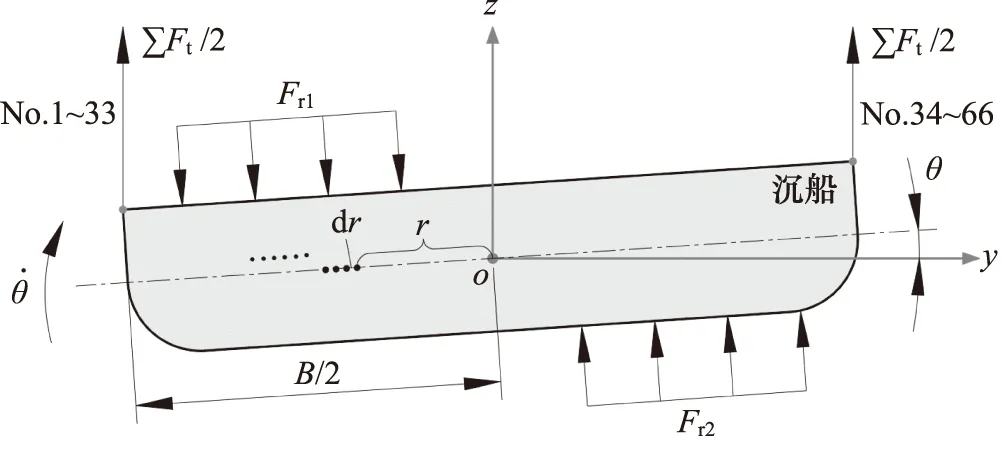
图5 沉船回转运动所受水阻力矩
(21)
式中,L,B分别为迎流表面的长度和宽度。
2.3 缆绳模型
钢丝绳具有一定的柔性,可等效为具有一定弹性刚度的线性弹簧,其伸长量与所受拉力的关系为:
(22)
式中,Cr—— 钢丝绳的等效刚度
Δl—— 钢丝绳伸长量
Cg—— 钢丝绳填充系数
A—— 缆绳横截面积
E—— 钢丝弹性模量
lr—— 缆绳原长
沉船悬吊时,单根缆绳的伸长量为:
Δl=xd-xSAHC-Δxw+l0
(23)
式中,xd—— 该缆绳上SAHC的理论补偿量
Δxw—— 该缆绳对应的沉船吊点竖直方向的位移变化量
l0—— 缆绳受沉船重力的初始伸长量
沉船吊点的竖直位移变化量与沉船自身的升沉、横摇和纵摇运动相关,即:
Δxwi=hw+zi-z0i
(24)
式中,zi为沉船发生横、纵摇转动后,吊点的竖直坐标,该坐标通过式(15)变换得到。
2.4 SAHC补偿量计算
实际海面上,船舶在海浪作用下也会产生6个自由度的运动,其中的升沉与横纵摇运动对水下负载的影响最显著。SAHC系统的理论位移补偿就是该补偿点与初始位置的偏差量,并以此作为AHC系统的输入量,再由主动执行器进行位置跟踪。
与沉船吊点位移计算类似,某时刻驳船吊点的位置偏差,即SAHC的理论补偿量,也与驳船3个主要运动相关:
xdi=hb+zdi-zd0i
式中,hb为驳船重心的升沉位移;zdi为由驳船转动造成的第i个吊点的竖直坐标,已知驳船横纵摇倾角即可由式(15)求得。
3 双驳SAHC系统仿真
仿真基于MATLAB/Simulink,参照“世越”号的实际打捞案例,按照驳船1号、“世越”号沉船和驳船2号的次序排列。两艘驳船间距为14 m(“世越”号型深),单艘驳船上的相邻吊点间距4 m。假设沉船已经完成离底,并悬吊于40 m水深(总水深44 m),双驳船受海浪激励运动,补偿系统工作。
因缺少实际打捞时沉船的运动数据与缆绳拉力数据,仿真将分别以PHC和SAHC两种补偿方式进行,对比分析两种补偿器的补偿效果。
3.1 双驳水动力仿真
双驳系统仿真以驳船的升沉、横纵摇运动作为输入量,因此为了得到与实际海况下相近的驳船运动时域数据,采用水动力仿真获得两艘驳船在真实海况参数下的运动时域数据,实际海况参数如表2所示[12]。

表2 “世越”号离底后的海况参数
水动力仿真得到的两艘驳船的升沉运动、横纵摇倾角的300 s时域结果如图6所示。由于海浪主要从驳船的右侧涌来,可见两艘驳船的横摇运动较为强烈,而纵摇运动较小。

图6 双驳船水动力仿真时域数据
3.2 双驳SAHC与PHC系统仿真
驳船上的66组SAHC系统相互独立工作,各吊点位移补偿量由2.4节公式计算,并通过PID控制器进行位置追踪。无论是仿真中或是实际,位移补偿都会存在补偿误差,因此无法彻底消除负载位移和缆绳张力的变动。仿真过程将忽略油液的压缩性和泄漏作用,不考虑沉船受水流扰动的影响。液压系统参数如表3所示,缆绳参数如表4所示。

表3 SAHC液压系统仿真参数

表4 钢丝缆绳参数
采用SAHC和PHC补偿器的沉船重心升沉运动仿真结果如图7所示。在180~210 s时,两艘驳船的升沉和横摇幅度有较大峰值,并且在沉船升沉运动中也有体现:只使用PHC系统的沉船重心升沉幅度最大约为0.2 m;而SAHC系统的幅度最大约为0.02 m,较PHC幅值下降约90%。

图7 SAHC与PHC沉船重心的升沉位移仿真结果
沉船横、纵摇的仿真结果如图8所示,相较驳船最大0.6°的横摇角度,SAHC系统使沉船横、纵摇运动基本平稳,最大横摇角度约3×10-4(°),最大纵摇角度约2×10-7(°);而采用PHC的沉船横、纵摇在整体上发生了偏转,推测是受双驳船不均匀拉力的作用,且沉船重心高于受力面,在无外力的矫正下会发生持续偏转。可见SAHC系统拥有更强的负载稳定性。

图8 SAHC与PHC沉船横纵摇仿真结果(左轴对应SAHC,右轴对应PHC)
“世越”号的水下重量约为5400 t(含外加浮力),分配到每根缆绳上的拉力约为801 kN。由于每艘驳船上的33根缆绳间的拉力差别较小,因此只提取每艘驳船上的首个吊点,即1号和34号缆绳进行对比,使用SAHC与PHC下的缆绳拉力F结果如图9所示。在约180 s时,2根缆绳拉力均到达峰值,使用PHC的2根缆绳拉力峰值约为840 kN;而使用SAHC的拉力峰值约为803 kN,较PHC拉力减少约95%。

图9 SAHC与PHC缆绳张力仿真结果
4 结论
本研究基于“世越”号打捞案例,建立了双驳船66组SAHC沉船打捞系统的数学模型,包括负载动力学模型、SAHC液压系统及柔性缆绳模型,通过水动力仿真获得双驳船的运动时域数据,并通过MATLAB/Simulink平台进行仿真。对比研究了SAHC与PHC两种补偿器的补偿效果,分析沉船的升沉位移、横纵摇倾角和缆绳拉力等负载特性,结果表明:
(1) 相比PHC系统,采用SAHC的双驳打捞系统更能有效降低沉船的升沉位移,最大位移幅值下降约90%;
(2) SAHC双驳打捞系统对沉船回转运动有更强的抑制作用,而PHC系统的沉船回转运动出现失稳现象;
(3) SAHC系统可有效削弱单根缆绳上的拉力变化,最大拉力相比PHC系统减少96%。
所研究的双驳多缆打捞仿真中,仅考虑了较理想的条件,因此在之后的研究中,需要引入更多现实因素的影响。同时需要进行实验,进一步验证仿真结果的正确性。
