模块化双作用水压人工肌肉关节设计
2021-06-16车进凯张增猛陈圣涛弓永军
车进凯,张增猛,陈圣涛,弓永军
(大连海事大学 船舶与海洋工程学院,辽宁 大连 116026)
引言
水下机械臂是水下机器人探索开发海洋资源的核心部分。因此,迫切需要开发出结构紧凑,拥有大范围运动空间且适用于水下机械臂的关节[1-2]。现有水下机械臂驱动方式包括液压驱动与电机驱动[3-4]。近年来,流体人工肌肉作为一种新型驱动器,广泛应用于医疗机械领域,其中气动人工肌肉工作压力一般不超过1 MPa、输出力较小,因此,利用气动人工肌肉驱动机械臂的输出转矩较小[5];另一种流体人工肌肉为水压人工肌肉,其输出重量比大,且不会污染环境。水压人工肌肉工作时动作平滑,无相对摩擦的运动部件[6]。相比液压缸、液压马达,水压人工肌肉驱动的水下机械臂重量和体积可以大大减小,结构更加灵活。与气动人工肌肉相比,水压人工肌肉具有输出重量比大、响应速度快等优点。利用水压人工肌肉驱动关节,可以在对关节进行紧凑性设计的同时,保证足够的输出转矩。MORITA[7]团队研发出由液压人工肌肉驱动的旋转关节,同时验证了该关节的能量密度为液压缸驱动关节的2倍。然而,MORITA团队研发的关节为单自由度关节,MIRO等[8]研发利用水压人工肌肉驱动的机械手,每根手指都有1个五连杆关节机构,可以抓取直径为300 mm,重量为45 kg的圆柱体。ZHANG等[9-11]研制了高强度水压人工肌肉关节,由于水压人工肌肉输出力可达到20 kN,所以采用直径为8 mm的钢丝绳作为传动丝。实验结果表明,由于钢丝绳刚度过大,导致实际关节旋转角度小于理论值。因此,需要设计出适用于水压人工肌肉关节的传动装置,使其能够承受水压人工肌肉的输出力,保证传动丝的柔韧性,便于关节的轻小型化设计。此外,现有水压人工肌肉关节设计缺乏模块化理念,不利于关节的扩展。因此,需要对水压人工肌肉关节的液压管路、电气通道及关节串联机械接口进行模块化设计。
为充分利用水压人工肌肉高输出重量比的优势,采用滑轮组与关节轮相结合的方式,放大水压人工肌肉的有效行程并降低传动丝的载荷。设计传动丝的连接结构及空间布局,使水压人工肌肉关节尽可能的轻小型化。设计模块化双作用水压人工肌肉关节,便于串联关节的扩展,为研发高性能水下作业机械臂奠定基础。
1 双作用水压人工肌肉关节传动装置
动滑轮实质为动力臂等于2倍阻力臂的杠杆。因此,水压人工肌肉关节采用滑轮组进行传动,如图1所示。滑轮组中的动滑轮与水压人工肌肉相连,水压人工肌肉收缩,带动动滑轮移动。通过滑轮组传动,降低传动丝载荷,充分利用了水压人工肌肉输出重量比大的优势,而且,传动丝末端移动距离为动滑轮移动距离的2倍,因此,滑轮组传动还放大了水压人工肌肉的有效行程,使得关节拥有大范围运动空间及高输出转矩。

1.关节轮 2. 1号传动装置 3. 2号传动装置4. 1号水压人工肌肉 5. 2号水压人工肌肉图1 滑轮组与关节轮相结合的水压人工肌肉关节
滑轮组可以采用多种组合方式,包括N个动滑轮和M个定滑轮,其中,M=N或M=N-1。拥有单个动滑轮的传动装置可以将水压人工肌肉的行程放大2倍,则关节转角所对应的弧长为水压人工肌肉收缩量的2倍;拥有2个滑轮的传动装置,如图2所示,可以将水压人工肌肉的行程放大3倍,则关节转角所对应的弧长为水压人工肌肉收缩量的3倍;拥有3个滑轮的传动装置可以将水压人工肌肉的的行程放大4倍,则关节转角所对应的弧长为水压人工肌肉收缩量的4倍。以此类推,拥有N个动滑轮和M个定滑轮的传动装置可以将水压人工肌肉的行程放大(N+M+1)倍,则关节转角所对应的弧长为水压人工肌肉收缩量的(N+M+1)倍。
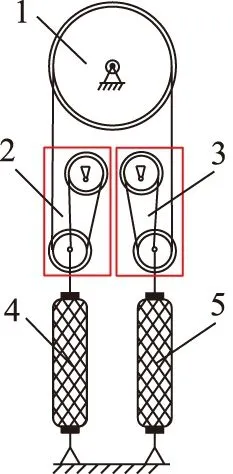
1.关节轮 2. 1号传动装置 3. 2号传动装置4. 1号水压人工肌肉 5. 2号水压人工肌肉图2 传动装置拥有2个滑轮的水压人工肌肉关节
2 双作用水压人工肌肉关节转角特性
水压人工肌肉输出力特性公式为:
(1)
其中,k1,k2为修正系数,设计阶段可先令k1=k2=1,r0为肌肉半径,p为充水压力,a,b为常数,ε为肌肉收缩率。根据前期水压人工肌肉输出特性试验,选择肌肉初始编织角α0=25°,最大收缩率为0.36。传动装置中拥有N个动滑轮和M个定滑轮,则水压人工肌肉相对初始位置的长度变化量x与关节转角所对应弧长larc的关系为x=larc/(N+M+1),其中larc=Rθ,R为关节轮回转半径,θ为关节转角。根据钢丝绳选型公式:
(2)
式中,d为最小直径;S为最大静载荷;C为选择系数。
(3)
其中,n为安全系数;k为折减系数;ω为充满系数;σ为公称抗拉强度;采用滑轮组传动,可以降低传动丝的传递载荷。
F=(N+M+1)S
(4)
通过计算可得,当N=1,M=0时,钢丝绳直径不超过5 mm,满足关节强度与柔韧性设计要求。设计水压人工肌肉关节回转半径为R=40 mm,水压人工肌肉的原长l0=300 mm。现有机械臂输出转矩约为100 Nm,因此,设计关节输出转矩为100 Nm,结合水压人工肌肉输出力特性公式 (1)可确定水压人工肌肉半径为30 mm。
关节回转过程中,1号肌肉的收缩率与充水压力分别为ε1=ε0-x/L1,p1=p0-Δp;2号肌肉的收缩率与充水压力分别为ε2=ε0+x/L2,p2=p0+Δp。其中,ε0为水压人工肌肉的初始收缩率。L1,L2分别为1,2号人工肌肉的初始原长;p0为2根肌肉的初始压力;Δp为2根肌肉相对于初始压力的压力变化量。根据水压人工肌肉输出力特性公式,关节输出转矩可表示为:
(5)
其中,F1为1号水压人工肌肉输出力,F2为2号水压人工肌肉输出力。初始状态下,系统无负载,关节输出转矩T=0,关节转角θ与压力变化量Δp之间的关系为:
(6)
根据关节转角范围、输出力矩及钢丝绳选型,取N=1,M=0,利用MATLAB绘制出关节转角θ与压力变化量Δp的关系曲线,如图3所示。
根据式(4)和图3可知,在最大收缩量范围内,相同压力变化下,初始收缩率ε0越小,关节转角越大。同样,在相同初始收缩率下,初始压力p0越小,关节转角越大。

图3 关节转角θ与压力变化量Δp的关系曲线
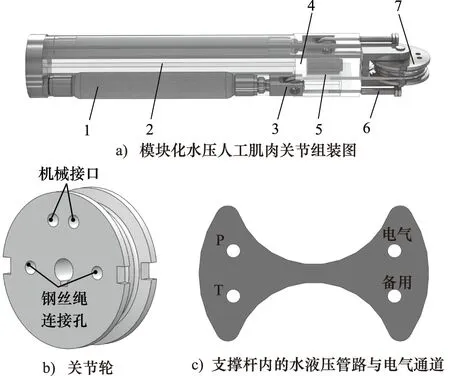
1.水压人工肌肉 2.支撑杆 3.传动装置4.耐压壳 5.水液压阀组 6.收紧装置 7.关节轮图4 模块化水压人工肌肉关节
3 模块化设计双作用水压人工肌肉关节
模块化水压人工肌肉关节包括关节轮、传动装置、收紧装置、水液压阀组、耐压壳、支撑杆和水压人工肌肉,如图4a所示。关节轮上设计2个线槽,为传动丝导向,传动丝跨过关节轮的1/2弧面,端部与钢丝绳连接孔利用销轴固定,关节轮的机械接口可实现模块化设计,如图4b所示。关节轮外径为46 mm,钢丝绳中心的回转半径为40 mm。向水压人工肌肉充水加压,人工肌肉径向膨胀,轴向收缩,产生收缩力。利用拮抗原理驱动关节轮转动的2根水压人工肌肉在初始工作状态下都具有初始收缩量。如果在初始工作状态下,人工肌肉处于原长,就不能驱动关节转动。因此,在设计阶段,确定水压人工肌肉的初始收缩量与传动丝的长度,使得在初始工作状态下,传动丝处于张紧状态。模块化关节所采用的水压人工肌肉最大收缩率为0.36,在初始工作状态时,水压人工肌肉的收缩率为0.15。在非工作状态下,水压人工肌肉处于原长状态,传动丝并未张紧,具有45 mm的余量,导致关节系统松散。因此,设计传动丝收紧装置,在非工作状态下,利用弹簧张紧传动丝,传动丝收紧装置中的弹簧长为60 mm。水压人工肌肉与滑轮组安装在机架与耐压壳之间,传动丝穿过耐压壳,绕过滑轮组,端部与收紧装置连接。在支撑杆内部设计水液压管路与电气通道,如图4c所示。在耐压壳内设计传动装置的活动空间,有助于水压人工肌肉关节的紧凑性设计。关节总长为590 mm,最大横截面直径为100 mm。
4 强度校核
根据关节设计转角范围、输出转矩以及水压人工肌肉输出特性试验,选用初始长度为300 mm、初始编织角为25°、橡胶管外径为30 mm,壁厚为2 mm的水压人工肌肉。利用水压人工肌肉输出特性试验台测试肌肉输出特性,如图5所示。该试验测试系统包括动力源、数据采集单元、压力控制单元和安装平台。通过芬兰某公司制造的水液压综合性试验台提供压力。由手动单向节流阀和水液压比例节流阀组成的B型半桥回路为压力控制单元,调节水压人工肌肉的工作压力。安装平台上端是花篮螺栓,用于调节肌肉的收缩量;下端连接拉力传感器和拉线位移传感器,记录试验中肌肉的收缩位移情况。水压肌肉输出特性曲线如图6所示,在压力一定时,收缩量越大,肌肉输出力越小,且随着收缩量增大,肌肉输出力变化量越小,即特性曲线斜率越小。此外,水压人工肌肉输出特性试验曲线并未经过原点,证明试验系统存在背压pb=0.4 MPa。
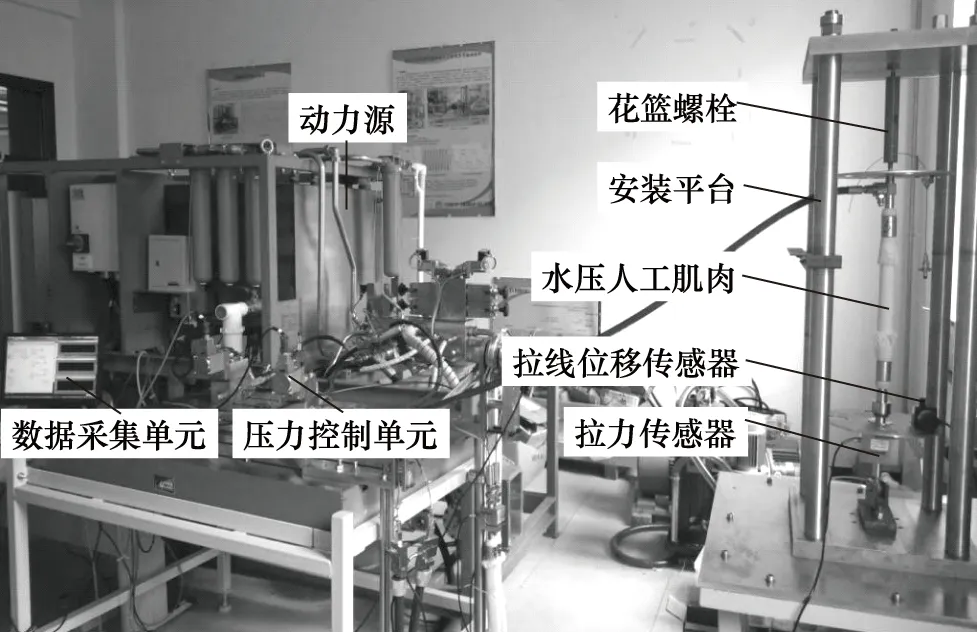
图5 水压人工肌肉输出特性试验台

图6 水压人工肌肉输出力特性曲线
水压人工肌肉破坏试验表明,同样参数的水压人工肌肉可承受的最大充水压力约为7.6 MPa。取安全系数为1.5,则在驱动关节回转时,水压人工肌肉的最大充水压力pmax<4 MPa。根据对称控制原理,水压人工肌肉初始压力p0=(pmax+pb)/2。此外,由于系统背压,在驱动关节回转时,水压人工肌肉不可能恢复至原长状态,而且,当一侧水压人工肌肉收缩量增大到70 mm时,即使继续增大充水压力也不能对抗另一侧低充水压力、低收缩量人工肌肉的输出力。因此,水压人工肌肉驱动关节回转的有效行程为10~60 mm。根据水压人工肌肉特性试验可得,关节极限状态下,2根水压人工肌肉的输出力分别为19112 N和650 N。支撑杆所受外力为2根水压人工肌肉输出力之和,即19762 N。根据支撑杆所受外力及边界约束进行强度校核,水液压管路及电气通道直径为8 mm的支撑杆强度校核结果如图7所示,最大应力为10.96 MPa。水液压管路及电气通道直径为20 mm的支撑杆强度校核结果如图8所示,最大应力为14.86 MPa。根据图7和图8可知,水液压管路及电气通道直径由8 mm扩大至20 mm后,支撑杆的强度仍然满足要求,因此,在后期设计中可以满足不同直径通道的需求。在采用较小通道时,可以对支撑杆进行轻量化设计。

图7 通道直径为8 mm的支撑杆强度校核结果
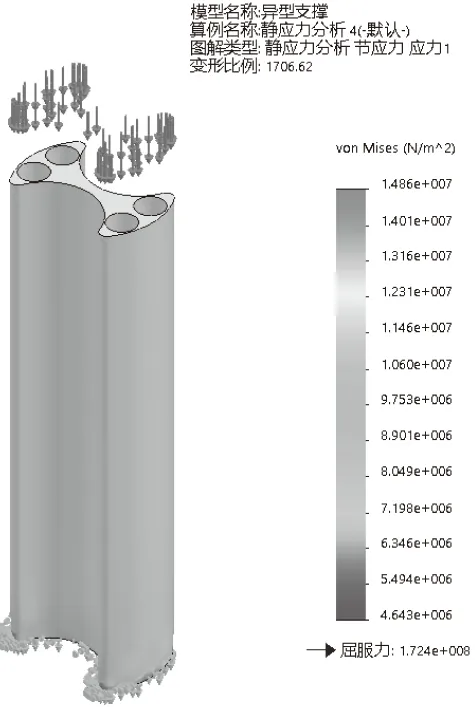
图8 通道直径为20 mm的支撑杆强度校核结果
5 结论
利用滑轮组传动,设计了模块化双作用水压人工肌肉关节,放大水压人工肌肉的有效行程并降低传动丝的载荷。设计传动丝收紧装置,解决了在非工作状态下,传动丝松弛的问题。采用异型支撑结构,充分利用关节空间,并将水液压管路和电气通道设计在支撑杆内部,实现关节的紧凑性设计。关节轮上设计模块化机械接口,便于关节的串联扩展。
