电液比例挖掘机闭环控制技术思考
2021-06-16曹东辉师建鹏石向星王泽锋訚顺宽
曹东辉,师建鹏,石向星,王泽锋,訚顺宽
(三一重机有限公司,江苏 苏州 215300)
引言
随着我国经济实力的提高和国家基础建设需求的飞速增长,工程机械行业得到了迅速发展。液压挖掘机作为功能典型、结构复杂、适应性高的工程机械之一,广泛应用于基础设施建设、矿山开采、国防建设、水利工程等多个领域。经过数十年的发展,我国已成为世界上最大的挖掘机生产国和消费国,目前全国挖掘机保有量约150万台,2019年国内挖掘机销量超过20万台。
现有的挖掘机大多采用液控系统的开环控制方式,操作者通过手柄开环控制各执行器的运行速度,通过操作者目测或经验实现闭环控制,操作难度大,作业效率低,对操作者的经验依赖性强。随着施工作业质量要求的不断提高、人工成本的迅速上升、自动化和智能化的发展趋势以及国家发展计划“中国制造 2025”的鼓励,目前的人工开环操作方式已难以满足更多的施工作业要求和智能化的发展趋势[1]。
实现挖掘机的智能化目标较为长远,目前差距还很大,只能循序渐进。首先必须实现的是挖掘机工作装置的闭环控制。由于挖掘机工况恶劣,冲击振动大,长久以来,位移传感器和角度传感器的可靠性无法满足要求,限制了挖掘机闭环控制的发展。随着倾角传感器性能的提高,实现挖掘机闭环控制成为可能,越来越多的企业和高校投入到挖掘机的闭环控制的研究中。
虽然电液比例闭环控制的理论已相当成熟并且已经有很多工程应用,但却仍未在挖掘机上得到应用。因此,针对电液比例挖掘机闭环控制的问题,从挖掘机的工况特点及与其他行业的不同点出发,结合挖掘机电液控制系统的特性,深入分析挖掘机闭环控制的难点和原因,介绍目前挖掘机闭环控制相关技术的发展现状,最后阐述挖掘机未来的发展趋势。
1 挖掘机的工况特点
挖掘机作为典型的土方机械,相对于其他行业,有以下几个显著的特点。
1.1 工作环境恶劣,工作强度大
相对于机床、汽车等行业,挖掘机的工作环境恶劣,建筑工地、露天矿山、隧道、高温极寒等场地,还包括一些危险环境作业,如地震、塌方、山体滑坡、化工爆炸等。挖掘机每天的工作时长一般在16 h以上,作业过程中,会产生大幅高频的振动和冲击,同时会产生巨大的噪声和尘土,液压节流也会产生大量的热量,使机器温度升高。恶劣的工作环境和超高的工作强度,对操作人员的承受能力、机器本身的稳定性以及元器件的可靠性都提出了更高的要求。
1.2 工况复杂,精细化施工增多
挖掘机的工况较为复杂多变,负载可能为矿石、沙土、散料、冻土,作业任务包括不同回转角度的装车、甩方、挖沟、平地、修坡等。随着工程作业质量要求的不断提高,精细化施工作业越来越多,如修建机场、高速路、水下河床整平等工程,作业面积大,要求精度高,对操作人员的经验和熟练度有了更高的要求。
1.3 操作难度大,对经验依赖性强
挖掘机具有2个双十字操作手柄和2个可前后行走的脚踏,整机具有6个相互独立的自由度,存在12种单动作和714种复合动作。对于平地、修坡等难度较大的工况,通常需要有丰富操作经验的操作手才能完成。表1所示为不同水平操作手可完成工作及培养时间。

表1 不同水平操作手可完成工作及所需培养时间
由于挖掘机特有的工况特点,使得挖掘机自动控制的需求愈加强烈,同时也使得挖掘机的闭环控制相对于其他行业具有更高的要求,更大的难度和挑战。
2 挖掘机系统分析
2.1 挖掘机电液控制系统分析
挖掘机是一种典型的单动力源多执行器控制系统。复合动作时,单个液压泵需要同时给多个执行器提供液压油,不同执行器之间存在复杂的流量耦合关系。复合动作时,不同执行器的流量分配比例由各腔的压力以及主阀的开口关系共同决定。图1所示为挖掘机电液控制系统组成原理。

图1 挖掘机电液控制系统组成原理
图2所示为挖掘机复杂的流量耦合关系。对于液控多路阀,设置多个液控优先阀,调节复合动作时两执行器的流量分配,以尽可能满足典型工况时复合动作的协调性。对于电液多路阀,取消了优先阀,通过控制阀口的开度实现流量分配,改变1个阀芯的开度不只会改变当前执行器的速度,同时会影响其他执行器的流量。因此,整个系统不仅仅是3个阀控液压缸系统的叠加,而是存在复杂的流量耦合关系。

图2 挖掘机复杂的流量耦合关系
2.2 工作装置运动学分析
挖掘机作业时,动臂油缸、斗杆油缸、铲斗油缸和回转马达各自绕关节转动,挖掘机可视为四自由度串联机器人,其位姿由各个连杆之间的角度共同决定。图3所示为工作装置连杆坐标系简图。
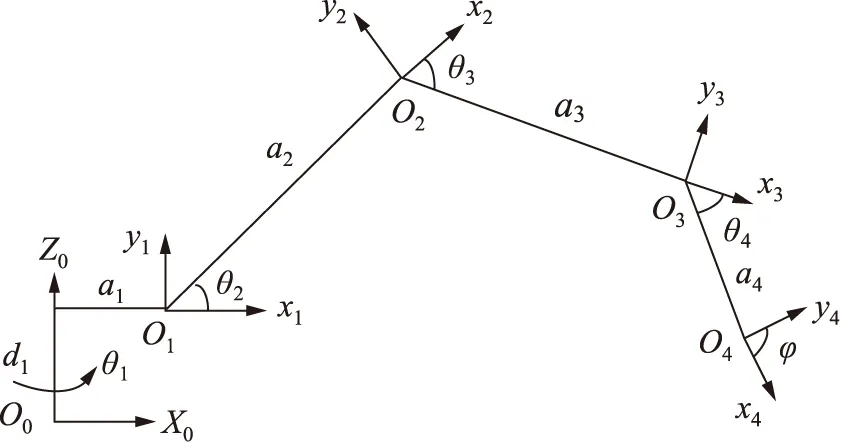
图3 工作装置连杆坐标系简图
铲斗齿尖的坐标位置为O4[x4,y4,z4],坐标系Oi[xi,yi,zi]与坐标系Oi-1[xi-1,yi-1,zi-1]的坐标变换为:
(1)
故基坐标到铲斗齿尖的坐标转换0T11T22T33T4为
(2)
其中
si=sinθi;sij=sin(θi+θj);sijk=sin(θi+θj+θk)
ci=cosθi;cij=cos(θi+θj);cijk=cos(θi+θj+θk)
假设坐标系O4内铲斗齿尖的位置坐标为[0,0,0,1],则可得到铲斗齿尖在坐标系O0内的坐标:
(3)
因在挖掘过程中回转关节保持不变,则铲斗位姿向量为[x,y,z,φ]T,因此可得到关节空间到位姿空间的映射为:
(4)
因此,挖掘机是一个具有多执行器动态流量耦合和多体动力学耦合和的系统,会在一定程度上影响各执行器的控制性能。图4所示为电液比例挖掘机闭环控制系统原理。
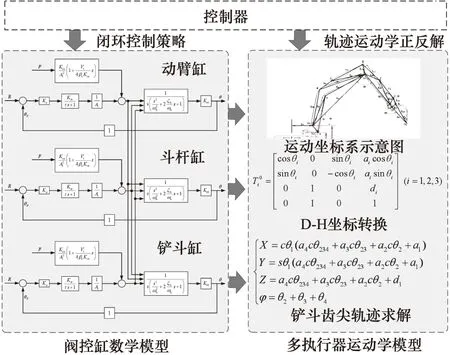
图4 电液比例挖掘机闭环控制系统原理
2.3 强非线性
目前的挖掘机广泛采用的是成本低、可靠性高的多路比例换向阀,为了保证挖掘机在手柄微调时的精细化作业和正常操作时的快速作业,阀口通常设计为不同形式的非线性特性,且受液压系统的饱和、泄漏、摩擦力、温度变化及液动力等因素的影响,挖掘机电液控制系统具有强的非线性特性。图5所示为川崎KMX32NA多路阀阀芯非线性开口特性,开口面积A,阀芯位移x。

图5 川崎KMX32NA多路阀阀芯非线性开口特性
3 挖掘机闭环控制关键技术及难点
对于挖掘机这种强非线性、强耦合性、参数不确定、负载复杂多变的系统,若要实现电液闭环控制并将其推广应用,需要克服几个关键技术难点。
3.1 轨迹跟踪控制算法
目前针对挖掘机轨迹控制算法的研究,主要涉及PID算法、非线性控制算法和智能控制算法[6-11]。
1) PID算法
PID是发展最早而且应用最广的控制策略之一,算法简单,易于实现,鲁棒性好,可靠性高。在线性系统、参数变化小、负载干扰小的电液伺服系统中得到了广泛的应用。但是,挖掘机电液比例控制系统具有复杂非线性、负载干扰强烈、时变不确定性的特点,仅采用常规的PID控制算法难以达到较好的动态响应和控制精度。
2) 非线性控制算法
非线性控制方法对于非线性、参数变化及外部不确定扰动的系统具有较好的控制性能,已经广泛应用于液压控制系统领域。用于机器关节运动控制较为典型的有滑模控制理论,通过滑模面的定义以及滑膜控制器的设计,使得系统从初始状态逐渐收敛于滑模面,并在控制项的作用下不再离开。为改善系统参数不确定性的影响,可结合自适应控制算法,通过在线学习的方式更新不确定参数的估计值,不断调整控制规律,保证系统的控制误差渐进收敛。还可以结合鲁棒性控制,以提高系统的瞬态响应速度以及存在外干扰时的鲁棒性,并通过设计自适应控制项以保证稳态误差渐进收敛。虽然非线性控制方法的控制效果较好,但是需要提前测定系统及相关原件的特性,并对无法测定的参数进行离线或在线辨识,测定时间长,耗时耗力。控制系统本身与控制器设计过程均较为复杂,难以满足挖掘机控制的实时性要求,且控制系统可靠性无法保障,较难在实际的产品中得到广泛应用。
3) 智能控制算法
目前应用于机器关节运动控制的智能算法主要有模糊控制和神经网络控制算法。模糊控制算法的重点在于模糊系统的建立,可以避免推导和建立精确的数学模型,对于简单的非线性电液控制系统,可通过模糊控制系统实现较好的结果。但是,对于挖掘机电液控制如此复杂多变的系统,模糊规则的建立难度非常大,很难找到可靠的建模依据并制定合理且全面的模糊规则,控制效果很难达到理想的状态。
神经网络方法是模拟人体神经元的学习过程,常用于模式识别或模型预测中,可避免数学模型和控制规则的建立。但是神经网络需要大量的数据进行离线或在线学习,对神经网络模型进行训练,若训练数据量少,则模型的准确性不足,若想提高模型准确性,必须使用大量的数据进行训练,庞大的计算量又无法满足挖掘机电液控制的实时性要求。此外,神经网络本身具有稳定性不足的缺点,即使训练的次数再多,神经网络也无法保证每次输出指令的正确性,错误的指令可能导致事故的发生,这对于挖掘机这种容错性特别低的系统而言是不可行的。
3.2 液压元件的性能
1) 主阀的响应性及控制精度
多路阀作为液压挖掘机的核心控制元件,对整个机器的工作性能有着至关重要的作用。市场上现有的挖掘机采用的多为成本低廉的液控多路阀,响应速度慢,控制精度低,难以满足闭环控制时的响应要求。在一些研究中,通过对控制算法的研究,得到了较好的轨迹跟踪结果,但试验时多采用响应速度快,控制精度高的比例阀或伺服阀,这种阀的成本较高,在工程实际中难以得到广泛的应用。表2所示为不同控制阀的特性及成本对比。

表2 不同控制阀的特性及成本对比
如何解决主阀的响应性和成本之间的矛盾,是实现挖掘机闭环控制并推广应用的难点之一。一方面,可以通过改善阀的结构或研究控制算法等方式,提高多路阀的响应性和控制精度;另一方面可以研究如何降低比例阀或伺服阀的成本,达到可以工程应用的程度。
2) 先导减压阀的滞环特性
挖掘机现有的先导减压阀存在较明显的滞环特性,造成滞环的主要因素是阀芯在运动过程中,阀芯与阀体间摩擦方向变化,而使得作用在阀芯上的合力发生变化产生。图6所示为先导减压阀的滞环特性,输入电压Ui,输出压力po。

图6 先导减压阀滞环特性
先导减压阀作为信号的输入级,滞环所带来的影响会在控制元件和执行元件被放大,增加了系统的非线性特性,降低系统操作稳定性和重复性,使得闭环控制特性和精度受到影响。因此,若要实现电液比例挖掘机闭环控制,必须采用有效的方法减弱减压阀的滞环特性,或开发相应的补偿控制算法补偿滞环所带来的影响。
3.3 负载特性的影响
挖掘机进行挖掘时,可分为铲斗挖掘、斗杆挖掘和复合挖掘,无论哪种工况,铲斗都会受到复杂且时变的挖掘阻力,并且挖掘阻力因土壤类型、地形、温度、挖掘姿态等有较大的差异[12]。挖掘机的外载荷是一种典型的随机载荷,但也具备一定的分布规律,可通过统计计数的方法,统计分析后得到载荷大小与频数之间关系的载荷谱。但载荷谱的获取需要极大的统计数据量,耗费巨大的时间、人力和物力,难度较大。目前的研究中,大多采用空载工况或者理想负载工况开展研究,由于负载特性对控制特性的干扰和影响作用很大,故难以充分验证控制系统的稳定性和抗负载干扰性能,需研发相应的控制算法对负载进行自适应或者减小负载的影响。
4 相关技术发展现状
目前,国外的卡特、小松公司,国内的三一重机、徐工、浙江大学、哈尔滨工业大学、中南大学、太原理工大学等均对挖掘机的闭环控制开展研究。
浙江大学设计了一种基于滑模变结构的挖掘机器人电液伺服控制系统,并制定了抗流量饱和控制策略,通过仿真和试验的方式对不同控制策略的轨迹跟踪结果进行了研究[13]。图7所示为抗流量饱和流量匹配控制框图。

图7 抗流量饱和流量匹配控制框图
哈尔滨工业大学采用模糊PID和模糊自适应控制策略,如图8所示,在模拟负载的环境下,通过仿真和试验对挖掘机工作装置运动轨迹的控制方法进行研究[14]。

图8 模型参考自适应控制系统结构框图
中南大学运用多种寻优算法对设定的挖掘任务依次进行任务分解、路径规划和轨迹规划,生成工作装置各关节运动所对应的轨迹序列。并运用多变量PID神经网络(MPIDNN)解耦控制算法较好的解决了挖掘机液压系统中存在的非线性和强耦合问题,实现了自主挖掘轨迹的跟踪控制[15]。图9所示为基于多变量PID神经网络的自主挖掘控制系统。
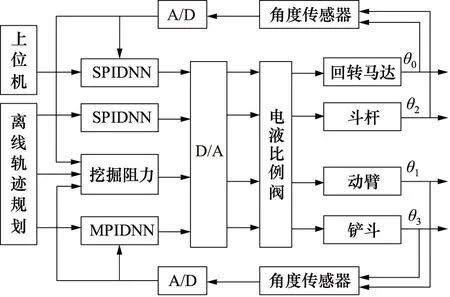
图9 基于多变量PID神经网络的自主挖掘控制系统
太原理工大学基于负载口独立控制系统,采用泵阀协同与速度位置复合控制策略,通过仿真设计控制器参数,控制工作装置和回转机构实现轨迹跟踪控制,并在试验样机上进行了试验研究[16-17]。
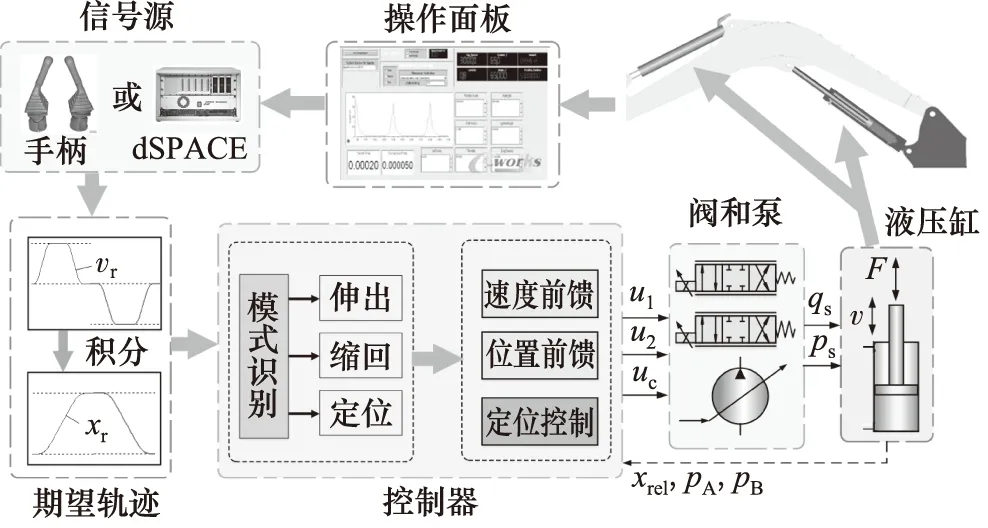
图10 负载口独立系统速度位置复合控制策略图
这些高校对挖掘机闭环轨迹控制开展了相关研究并取得了一定的成果,但是以上研究大多仍处于试验样机阶段,未能很好的解决挖掘机实际负载问题,且未研制出较为成型的产品。
目前,推出过成型产品的有国内外的几家大型挖掘机主机厂。
日本小松公司早在2013年德国慕尼黑展会上展示了首款智能挖掘机PC210LCi-10,以ICT中的IMC(Intelligent Machine Control)技术为核心,配备了GNSS天线,IMU+(惯性测量单元),行程感应缸和控制器等,GNSS用于确定机器的坐标和高程、动臂、斗杆和铲斗液压缸内部的行程传感器,用于精确测量液压缸行程以及速度,IMU+能够检测挖机的姿势,保证坡道工作更加精确。
2017年3月的美国拉斯维加斯国际工程机械展上,小松基于PC210LCi-10的技术,又开发了新一代的PC210LCi-11智能挖掘机、36 t级的PC360LCi-11和48 t 级的PC490LCi-11,走在了智能化挖掘机技术的前沿。

图11 小松首款智能挖掘机PC210LCi-10

图12 2017年拉展小松PC360LCi-11挖掘机
2017年北京BASIC展会,美国卡特彼勒公司推出新一代的CAT320和CAT323智能机,标配和2D坡度控制系统,能够帮助操作手快速、精准地实现坡度作业目标,帮助引导整平作业,包括:深度、坡度、平距等施工指标。标准的2D坡度控制系统,可以根据客户需求轻松升级为高级2D坡度控制系统或3D坡度控制系统。

图13 卡特彼勒CAT323智能挖掘机
国内对挖掘机闭环控制研发比较典型的是三一重机有限公司。三一重机与中航工业集团西安飞行自动控制研究所合作开发的SY365智能挖掘机,采用了飞行自控所自主研制的直接驱动阀技术(Direct Drive Valve,DDV),实现阀芯位移闭环控制,大大地提高了主阀的响应速度和控制精度,构成挖掘机作业轨迹双闭环控制系统,并结合粒子群优化算法,解决了挖掘机非线性、强耦合和迟滞等问题[18],控制精度达到厘米级。图14所示为基于DDV技术的挖掘机双闭环控制原理。2018年上海Bauma展会上,该SY365智能机展示了远程遥控、自主路径、自主挖沟、一键平地等功能,获得了行业内的广泛关注。
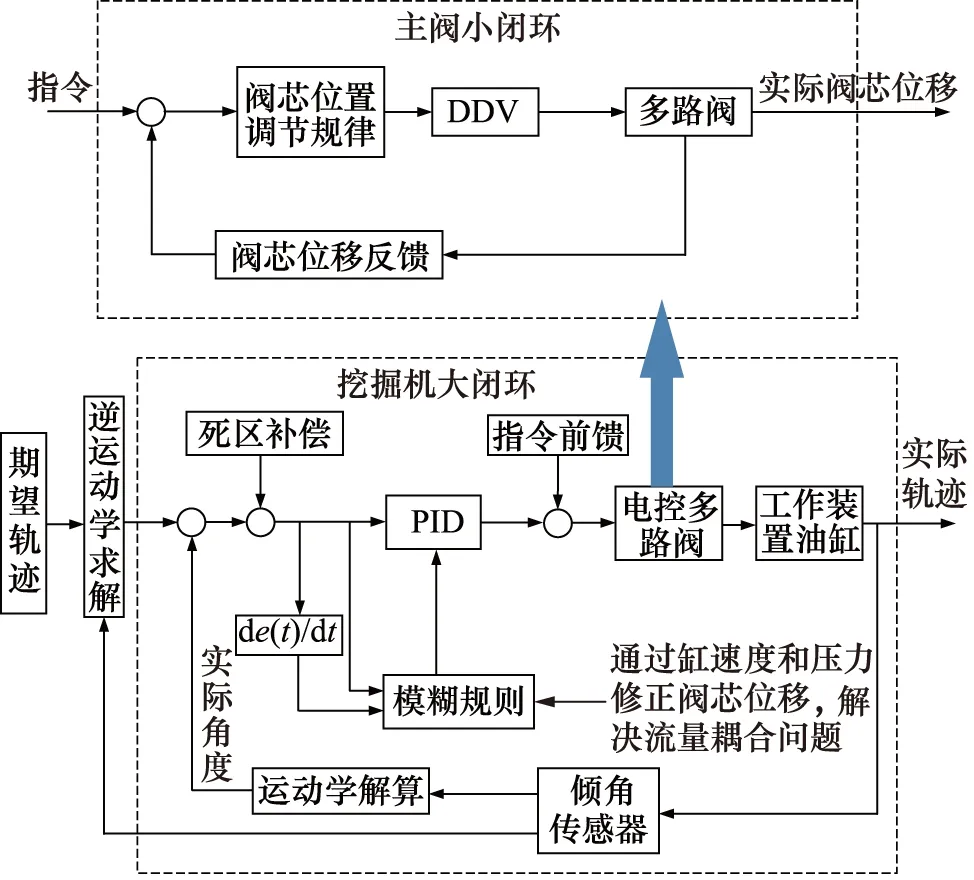
图14 基于DDV技术的挖掘机双闭环控制原理

图15 2018年上海Bauma展会三一展示SY365智能机
5 发展趋势
总之,目前的人工开环控制方式的液压挖掘机已无法适应行业的发展趋势和市场的需求,实现挖掘机的闭环控制是必然趋势。挖掘机的闭环控制会经历不同的发展阶段。
(1) 人工辅助闭环控制:通过操作员设置目标轨迹,比如较为典型的平地轨迹、斜坡轨迹等,驾驶员通过操作单个手柄,控制动臂、斗杆、铲斗同时运动,使铲斗齿尖按照设定轨迹,达到一键平地、一键修坡的功能。目前卡特、小松、三一重机等公司都已在展会上展示其研发成果;
(2) 半自动学习闭环控制:通过不断记录复合动作的轨迹,如90°装车、甩方等,结合学习算法,针对不同工况自主生成相应的目标轨迹,驾驶员通过简单操作,即可控制动臂、斗杆、铲斗和回转装置按照目标轨迹运行,达到一键装车,一键甩方的功能。对于重复性高的工况,该模式可实现更高的工作效率和工作质量;
(3) 完全自主闭环控制:此阶段需要结合其他设备,如摄像头、无人机等,实时监测地形地貌及挖掘变化情况,并进行在线轨迹规划运算,将生成的目标轨迹传输至挖掘机,控制挖掘机实现自主挖掘,达到无人化的完全自主闭环控制。
6 结论
随着各行业自动化和智能化的不断发展,挖掘机的智能化是必然趋势。而实现挖掘机的闭环控制并推广应用是目前行业的难题,也是实现智能挖掘机的必经之路和必要前提。一方面,需针对挖掘机强非线性、强耦合性、参数不确定、负载复杂多变等特性,加强对轨迹控制算法的研究和应用。另一方面,需加大对主阀、先导阀、传感器等核心部件的研发和投入,改善其可靠性、响应、精度等特性,同时降低产品成本,才能得到更广泛的工程应用,为挖掘机闭环控制提供硬件基础。
