全液压动臂塔机变幅机构能量回收再利用研究
2021-06-16张晶辉
费 烨,张晶辉,杨 妍
(沈阳建筑大学 机械工程学院,辽宁 沈阳 110168)
引言
全液压动臂塔机在变幅过程中动臂下放时,动臂势能被其液压系统中的平衡阀消耗,以热能形式散发到系统,使油液升温,导致能量损耗的同时还会对系统工作性能产生不利影响[1-2]。将这部分能量回收再利用,既可提高塔机液压系统效率,又能节能减排[3]。因此,全液压动臂塔机变幅系统能量回收再利用研究具有实际应用价值。
国外关于工程机械液压系统能量回收再利用的研究主要集中于液压系统工作模式匹配的合理性和液压系统的动力源方面,以动力混合方式实现[4-6]。国内相关研究的重点为工作过程液压系统能量回收再利用,主要实现方法有油液混合和油电混合[7-9],其中油液混合能量回收再利用效率较高,但要借助蓄能器才能实现,相比油电混合需要较大设备空间;而油电混合方式增加了能量转换环节,较油液混合能量回收再利用效率低,但结构紧凑,适于装载机和挖掘机等空间有限的工程机械。
全液压动臂塔机空间较大,可用蓄能器、泵/马达二次元件以压力能方式回收动臂势能[10]。本研究以国内某型全液压动臂塔机为研究对象,考虑动臂分布质量及动臂下降过程液压系统为超越变负载的特点,用AMESim软件的平面机械库和液压库搭建塔机变幅机构的机液一体化模型,对动臂势能回收及再利用进行可行性仿真分析。
1 变幅机构能量回收再利用系统设计
全液压动臂塔机液压变幅原理如图1所示。压力油进入马达6左或右腔,驱动卷筒和钢丝绳牵引动臂升降实现变幅。动臂下放时重力势能被平衡阀5消耗,转化为热能。为避免这部分损失,在图1原理基础上增添蓄能器,对动臂下放过程的重力势能回收利用,设计变幅机构能量回收再利用系统,如图2所示,其中回收能量的蓄能器采用三级压力梯级配置。

1.液压泵 2.溢流阀 3.手动阀 4.单向节流阀5.平衡阀 6.马达 7.制动缸图1 原变幅液压系统原理
由图2可知,将阀3-1,3-4置于右位,泵1油液经阀3-1右位、阀4、阀3-4右位进入元件8左腔,右腔排出油液经阀3-1右位回油箱,元件8为马达工况,动臂抬升;将阀3-1置于中位,泵1卸荷,动臂下放,并通过钢丝绳带动卷筒形成转矩驱动元件8转动,此时元件8为泵工况,在该过程中,将阀3-4切换至左位,压力油经阀3-4左位、阀3-2右位进入低压蓄能器6-1,当蓄能器6-1进油口达到一定压力时,阀3-2切换左位,压力油经阀3-2左位、3-3右位进入中压蓄能器6-2,当蓄能器6-2达到一定压力时,压力油经阀3-3左位进入高压蓄能器6-3,动臂下放势能得以回收。

1.变幅泵 2.溢流阀 3.换向阀 4.平衡阀 5.压力继电器6-1~6-3.低、中、高压蓄能器 7.补油阀 8.泵/马达9.散热马达 10.散热泵 11.回转马达 12.回转泵图2 变幅机构能量回收再利用系统原理
低压蓄能器回收能量后可经阀3-5下位与散热泵合流,为散热马达供油,加速散热;当低压蓄能器释放完能量后,通过压力继电器5-1使阀3-5切换回上位,散热泵继续为散热马达供油;高压蓄能器回收能量后,可在需要时切换阀3-10到下位、阀3-11到左位,高压蓄能器放油,为回转马达提供大转矩,克服回转机构启动时较大的静摩擦阻力矩,此时回转泵12卸荷;当高压蓄能器压力降低到设定值时,压力继电器5-3发出电信号使阀3-10切换到上位,阀3-7和3-8切换到下位,中压蓄能器接入回转回路继续为回转马达供油;当中压蓄能器压力降至设定值时,压力继电器5-2切换阀3-8到上位、阀3-11到右位,中压蓄能器和散热泵合流,为散热马达供油加快散热,同时回转泵继续为回转马达供油,直到回转结束;当中压蓄能器压力再次降至设定值时,压力继电器5-2切换阀3-8到中位、阀3-7到上位。如此实现回收能量的再利用。
2 变幅机构能量回收再利用系统建模
借助AMESim软件中的平面机械库搭建动臂、塔头、变幅滑轮组等模型,组合出塔机变幅机械模型,然后与液压库中的液压马达、电磁换向阀等模型连接,形成变幅机构能量回收再利用系统机液一体化模型如图3所示,相关参数如表1。参照蓄能器样本,按体积将每级蓄能器分为2个进行仿真。

图3 动臂变幅能量回收再利用系统AMESim模型

表1 动臂变幅能量回收再利用系统主要元件参数
3 变幅机构能量回收再利用系统仿真分析
3.1 仿真模型验证
该塔机动臂仰角范围是17°~80°,工作时动臂在较大工作幅度抓取负载后减小工作幅度卸载,然后动臂空载下降到下一工作幅度位置再起吊负载,如此循环。能量回收是在空载落臂阶段,本研究对空载时动臂仰角从17°到80°,再从80°到17°的工况进行仿真,其中变幅机构传动原理如图4所示,传动链参数见表2。

1.泵/马达 2.减速机 3.变幅卷筒图4 变幅机构传动原理

表2 变幅机构传动链参数
运行图3模型,得到动臂仰角θ变化曲线和泵/马达双腔压差Δp曲线如图5、图6所示。

图5 动臂仰角变化曲线
根据样本,动臂空载从17°变幅到80°需时90 s。由图5仿真所得时间为89 s,误差可忽略。
图6表明:变幅启动时动臂仰角最小,泵/马达负载最大即转矩最大,且启动阶段由于换向阀的突然切换,存在压力波动,约3.4 s后泵/马达压差稳定在32.43 MPa,此时动臂仰角18°;随着动臂抬升,泵/马达负载转矩和压差逐渐减小,变幅到80°时泵/马达负载转矩最小,压力很低,但因系统制动存在压力波动;95 s动臂下落,泵/马达在动臂重力作用下反转,为泵工况,该过程泵/马达将动臂势能转换为压力能输出至蓄能器,随着动臂下放,泵/马达负载转矩和压差逐渐增加;在98.1 s时泵/马达双腔压差稳定在8.09 MPa,此时动臂从仰角80°降至79°。

图6 泵/马达双腔压差曲线
对塔机空载动臂仰角从17°变幅到18°、从80°变幅到79°泵/马达压差稳定时进行受力分析,如图7所示,l1,l2,l3分别为动臂在18°时动臂质心、吊钩质心、钢丝绳拉力竖直分力到铰点O的水平距离;l4为钢丝绳拉力水平分力到铰点O的竖直距离;θ1为钢丝绳拉力与其竖直分力的夹角;l5,l6,l7分别为动臂在 79°时动臂质心、吊钩质心、钢丝绳拉力竖直分力到铰点O的水平距离;l8为钢丝绳拉力水平分力到铰点O的竖直距离;θ2为钢丝绳拉力与其水平分力的夹角。l1=42.882m,l2=78.665 m,l3=77.294 m,l4=26.086 m,l5=8.513 m,l6=16.311 m,l7=14.656 m,l8=80.251 m,θ1=83°,θ2=71°。

图7 动臂受力分析图
对O点取矩并令∑Mo=0,即:
F1sinθ1·l4-F1cosθ1·l3-m1gl1-m2gl2=0
(1)
F2cosθ2·l8-F1sinθ2·l7-m1gl5-m2gl6=0
(2)
可求得动臂2个仰角时钢丝绳拉力:F1=969422.02 N,F2=260060.63 N。
18°时变幅马达负载转矩公式为:
(3)
79°时变幅马达负载转矩公式为:
(4)
变幅马达双腔压差公式为:
(5)
式中,n—— 钢丝绳层数
q—— 泵/马达排量
该塔机动臂仰角18°时,变幅卷筒缠绕2层钢丝绳,即n=2;动臂仰角79°时,n=3。
由上述公式可求得动臂仰角为18°,79°时,Δp1=32.69 MPa,Δp2=8.26 MPa,马达双腔压差计算与仿真值之差在误差允许范围内,因此变幅系统仿真模型正确。
3.2 变幅机构能量回收再利用研究
变幅机构中,动臂下放势能由动臂和吊钩产生,动臂和吊钩重心铅锤方向位移y变化如图8所示。
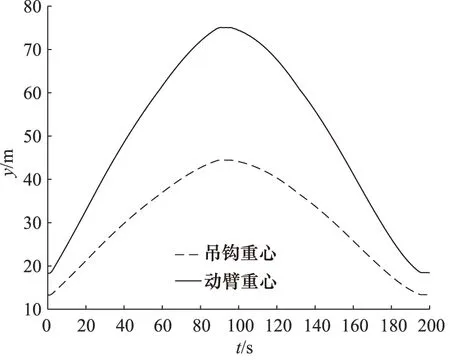
图8 动臂和吊钩重心铅锤方向变化曲线
动臂和吊钩重心铅锤变化量Δy1=31.22 m,Δy2=56.82 m,则损失势能:
E=m1gΔy1+m2gΔy2=11612.06 kJ
(6)
动臂从80°仰角下放至17°,蓄能器回收能量。为保证能量回收再利用系统工作性能,使低压蓄能器压力增至10.1 MPa停止充液,切换中压蓄能器充液至压力为20.5 MPa时停止,再切换至高压蓄能器充液,直到变幅结束。蓄能器能量回收结束后,让低压蓄能器驱动散热马达,直到蓄能器压力降至5.6 MPa,高压蓄能器给回转马达供油提供启动扭矩,直到蓄能器压力降至21.3 MPa,再由中压蓄能器继续驱动,直到蓄能器压力降至16 MPa,之后中压蓄能器再驱动散热马达,直到压力降至9.5 MPa。
图9和图10是蓄能器气体压力变化p和气体体积V变化曲线。蓄能器气体压力呈先升高再降低趋势。随着气体压力的升高,蓄能器气体体积减小,气体被压缩,液压油流入蓄能器回收能量;随着蓄能器气体压力的降低,气体体积增大,被压缩气体膨胀复原,液压油流出蓄能器释放能量。
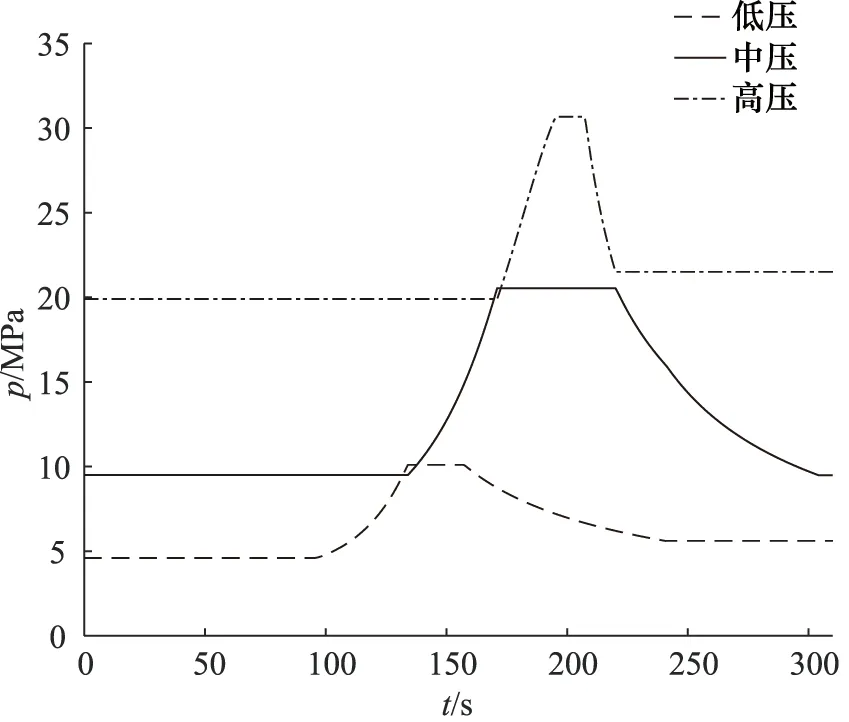
图9 蓄能器气体压力变化曲线
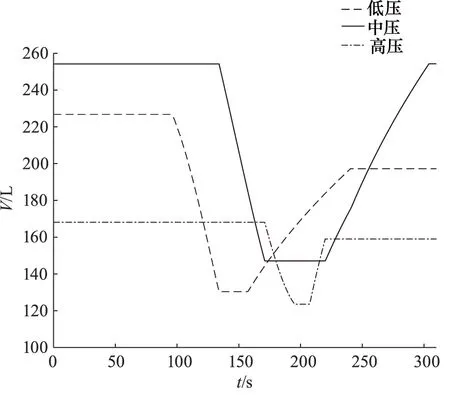
图10 蓄能器气体体积变化曲线
蓄能器的储能公式为:
(7)
式中,p1,p2—— 蓄能器最低、最高工作压力
V1,V2—— 蓄能器p1,p2所对应的气体体积
n—— 绝热指数,n=1.4
计算得低压蓄能器回收能量1309.2 kJ,中压蓄能器回收2989.2 kJ,高压蓄能器回收2212.4 kJ。动臂势能回收率为:
蓄能器释放能量驱动散热、回转马达做功,马达对外做功即蓄能器被利用的能量。对马达输入流量和压力的乘积积分,得到马达做功W曲线,如图11所示。其中散热马达做功2713.7 kJ,回转马达做功2206.2 kJ,则系统回收能量的再利用率为:

图11 马达对外做功曲线
3.3 蓄能器压力梯级配置合理性分析
能量回收再利用系统中蓄能器的设置应满足两方面的要求:
(1) 蓄能器不失效[11-12];
(2) 能量回收对原系统性能影响最小。
考虑蓄能器气囊安全,蓄能器的预充气压力p0和最高工作压力p2之间的关系应满足p2≤4p0,而图5表明,变幅系统的最低与最高压力相差约6倍,采用一级蓄能器回收能量无法满足p2≤4p0。图12和图13分别为原系统采用二级、三级蓄能器时泵/马达转速n曲线和动臂仰角变化曲线。
图12和图13表明,采用二级蓄能器回收能量时,泵/马达转速与原系统马达转速趋势一致,且最大相对误差不足3.6%,但动臂从80°下放到26.3°后无法继续向下变幅,这是因为泵/马达提供的压力在此刻比蓄能器压力低,无法为蓄能器充液;采用三级蓄能器回收能量,既可使能量回收系统的工作性能与原系统相差不大,又可使动臂变幅到最低位置,虽然变幅时间较原系统滞后8 s,但对于塔式起重机这种非精密装备影响不大,可以忽略。
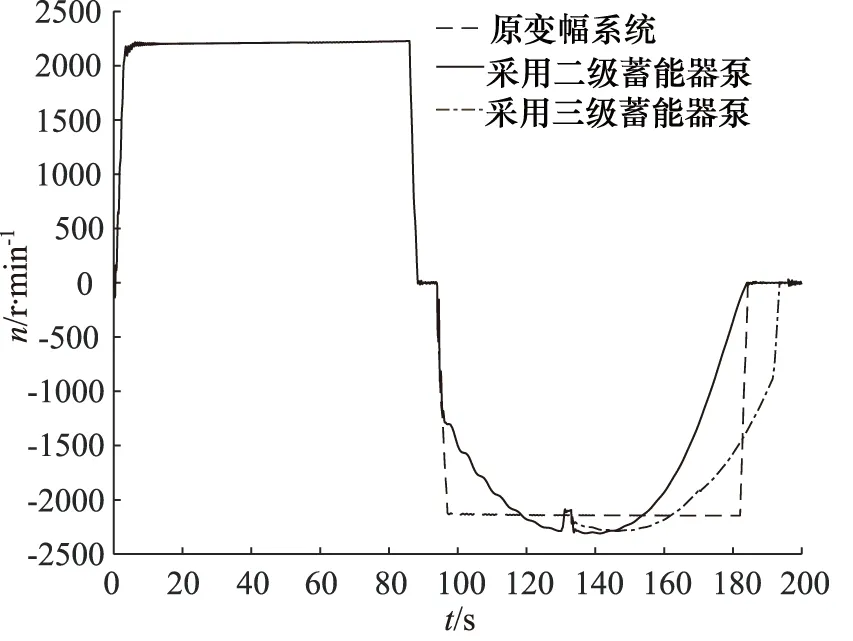
图12 不同系统泵/马达转速曲线
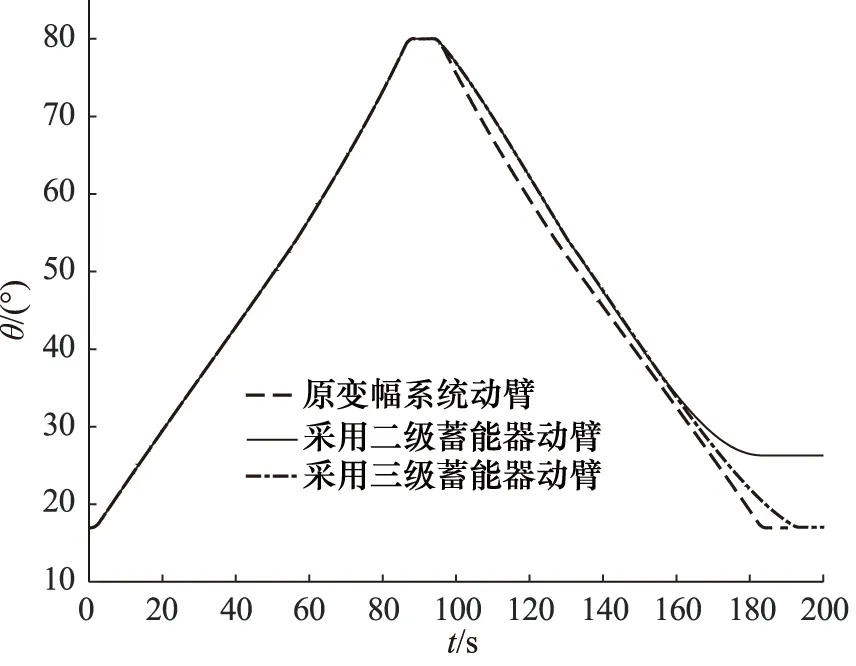
图13 不同系统动臂仰角变化曲线
4 结论
通过对某型全液压动臂塔机改进后的节能变幅液压系统进行仿真分析,可得到如下结论:
(1) 变幅机构能量回收再利用系统可实现动臂下降过程中势能的回收再利用;
(2) 因变幅过程中动臂势能变化很大,采用多个蓄能器设定压力梯级配置进行能量回收较为合理;
(3) 就该型号塔机而言,采用三级蓄能器设定压力按照4.6, 9.5, 19.9 MPa进行梯级配置,动臂势能回收率达56.07%,再利用率达75.56%,同时对原系统变幅性能影响可以忽略,变幅机构能量回收再利用方法研究对其他工程机械液压系统节能设计也具有借鉴意义。
