基于LMD信号重构和支持向量机的柱塞泵故障诊断分析
2021-06-16洪晓艺翟东媛乔庆鹏
洪晓艺, 翟东媛,乔庆鹏
(1.新乡职业技术学院,电子信息系,河南 新乡 453006;2.湖南大学,电子信息工程系,湖南 长沙 410082;3.河南财政金融学院,人工智能学院,河南 郑州 450046)
引言
柱塞泵属于当前工业生产领域获得广泛使用的输送泵,具备运行过程稳定并可以达到高压高效率的性能[1-3]。但考虑到柱塞泵的组成结构较复杂,并且通常都是处于长期高速运转的状态,较易发生表面磨损与松靴磨损的问题,从而引起安全事故[4-5]。最初对柱塞泵开展故障诊断时通常需要通过技术人员根据之前经验进行判断,之后升级为可以通过参数测试的方法完成诊断过程,现在已能实现智能诊断的功能。其中,智能诊断是从柱塞泵壳体与端盖位置获取振动信号,之后通过系统分析柱塞泵的工作状态[6-8]。目前,对这方面开展研究的学者也较多,任立通等[9]采用随机共振方法处理振动信号,对振动信号频率进行增强后获得更高的信噪比,由此提升了准确度,采用上述方法诊断非线性特征时获得了理想的诊断效果,不过需要较长计算时间,算法处理过程太复杂。胡晋伟等[10]利用超限学习机对柱塞泵进行滑靴磨损故障诊断,先对振动信号实施预处理,再提取得到特征向量,将其输入到超限学习机并诊断滑靴磨损程度。袁兵等[11]综合运用集合经验模态分解和SVM的方法,准确诊断得到滑靴耳轴磨损、柱塞泵滑靴磨损以及球头松动情况。张华等[12]同时采用SVM和符号动力学信息熵的方法构建得到信息熵特征集,实现了对液压泵的不同类型故障识别功能,但采用此方法需要经过复杂的诊断过程,花费较长的学习时间,并且整体流程太复杂,由此降低了诊断效率。
本研究用LMD对诊断流程进行了简化处理。为了对重构信号特征提取优势进行分析,在SVM中输入原始信号与重构信号特征数据集,之后比较了训练和诊断所得结果。
1 局部均值分解(LMD)原理
LMD可以通过自适应的方式把复杂振动信号分解成不同物理分量的组合结果,获得信号本质特征,有效克服端点效应,避免发生模态混叠情况,降低迭代次数,获得更完整信号信息,更适合分解非线性柱塞泵故障信号[13-14]。
算法计算流程如下:
(1) 根据信号x(t)确定各个极值点,之后计算相邻极值的均值。计算得到信号x(t)包络估计值,然后通过滑动平均方法处理2条折线,达到平滑的效果,由此得到局部均值函数m11(t)以及包络估计函数v11(t)。
(2) 将信号x(t)中的m11(t)去除:
d11(t)=x(t)-m11(t)
(3) 以d11(t)和v11(t)相除获得s11(t)。
s11(t)=d11(t)/v11(t)
从理论层面分析可知,s11(t)属于纯调频信号,对应的包络估计函数v12(t)为1,当v12(t)不为1时,则以s11(t)代替信号x(t)再重新执行以上过程,最终获得纯调频信号s11(t),满足-1≤s11(t)≤1,对应的包络估计函数v12(t)为1。
进行实际运算时,通常会设置更宽的迭代终止条件,对于一个微小量Δ,存在以下的迭代终止条件:
1-Δ≤v1n(t)≤1+Δ。
(4) 对上述所有包络估计函数乘积处理,得到以下包络信号v1(t):
(5)s1n(t)与v1(t)乘积属于原始信号分解得到的首个PF分量。
PF1(t)=s11(t)v1(t)
以包络信号v1(t)表示PF1瞬时幅值,通过处理纯调频信号s1n(t)获得瞬时频率。
(6) 将原信号x(t)的第一个PF分量去除,以u1(t)作为输入信号继续执行以上过程,经过k次循环处理直到uk成为单调函数停止,得到以下表达式:
图1给出了LMD计算过程的具体流程。
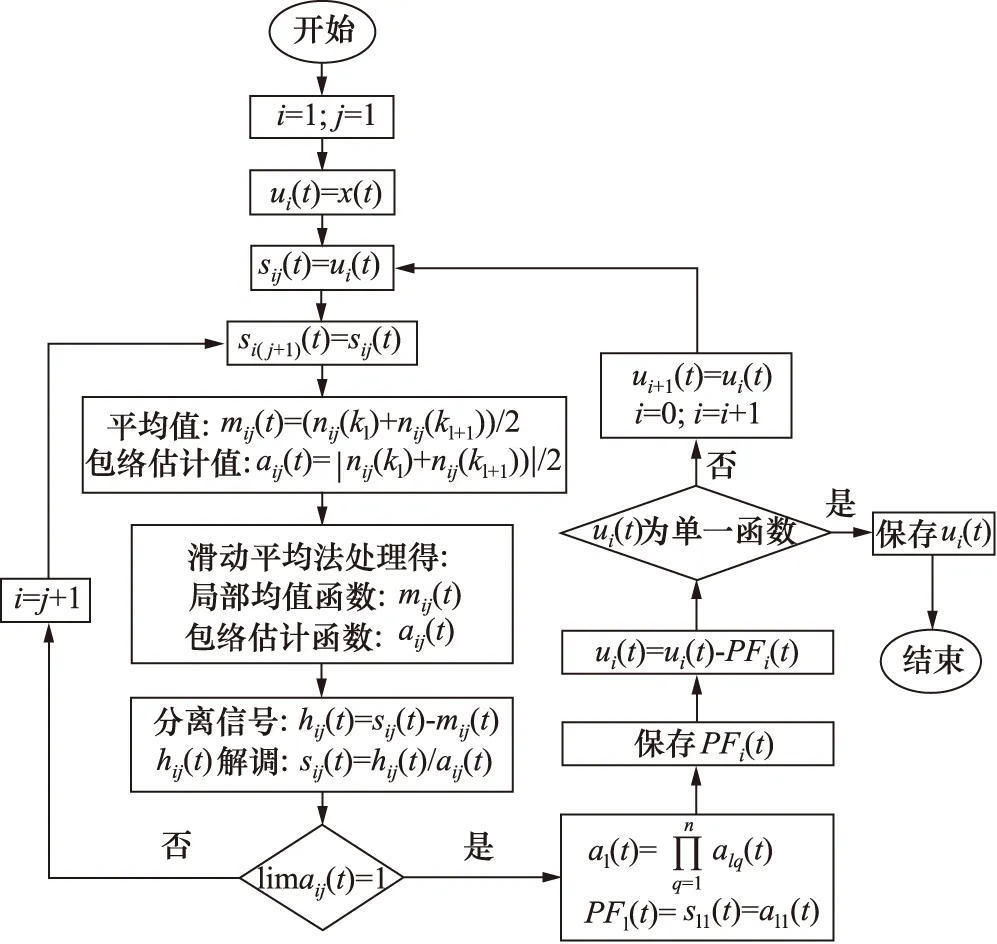
图1 LMD流程图
2 柱塞泵故障特征提取
2.1 柱塞泵特征数据集
柱塞泵的故障类型主要包括配流盘磨损、柱塞磨损、滑靴磨损等形式[15-16]。采用常规信号处理方式不能精确反馈故障信号特征,无法区分故障类型。本研究采用加速度传感器处理柱塞泵X轴方向的信号,柱塞泵振动信号采集方式如图2所示。选取A10VS045型柱塞泵作为试验对象,通过放置于泵壳体上的加速度传感器采集振动信号。从中提取得到信号特征,先对采集获得的5种状态振动信号实施LMD分解与重构,并以重构信号样本熵和原始信号标准差构成故障特征向量再从中提出得到特征参数。图3给出了柱塞泵故障特征的具体提取流程。

1.电动机 2.柱塞泵 3.单向节流阀 4.压力表5.溢流阀 6.过滤器 7.油箱 8.加速度传感计图2 柱塞泵振动信号采集示意图

图3 特征提取基本流程图
对振动信号采集得到150个样本,各样本包含了约3500个数据,一种状态包含150组特征向量,以随机方式选择100组训练样本,再对剩余50组样本进行测试。表1给出了特征数据集。

表1 柱塞泵特征数据集
2.2 故障信号分解与重构
将工作压力设定为10 MPa情况下,再对去噪处理后的柱塞泵处于正常、柱塞磨损、配流盘磨损、滑靴磨损与松靴磨损状态下的信号实施LMD分解,对各工况振动信号进行分解得到5~6个PF分量。对松靴磨损故障LMD分解得到如图4所示的时域,结果显示,最初几个PF分量中存在原始信号,只形成了很小的PF5与残余量,因此可以判断其属于噪声成分。对LMD分解过程进行分析可以发现,PF分量属于原始振动信号一部分,体现了信号频率部分。当PF分量中含有原始振动信号有效特征频率成分时,则存在较强相关性,虚假分量只存在少量有效特征频率,对应的相关性也较弱。此时可以通过相关系数法处理分解后的PF分量和原始振动信号,以低相关性的分量作为噪声信号,同时重构高相关性的分量。

图4 松靴磨损信号LMD分解图
选择具备较高有效特征频率成分的PF分量实施重构,同时以PF分量和原始信号相关系数均值达到0.01的PF分量实施信号重构。按照同样的方式获得其余4种状态对应的重构信号。为确保重构信号满足有效性,测试了重构信号和原始振动信号的相关性水平,得到表2所示的各状态重构信号和原始信号之间的相关系数,结果显示,每种状态重构信号和原始信号之间的相关系数都达到0.9以上,说明重构信号内已经含有原始信号主要信息。
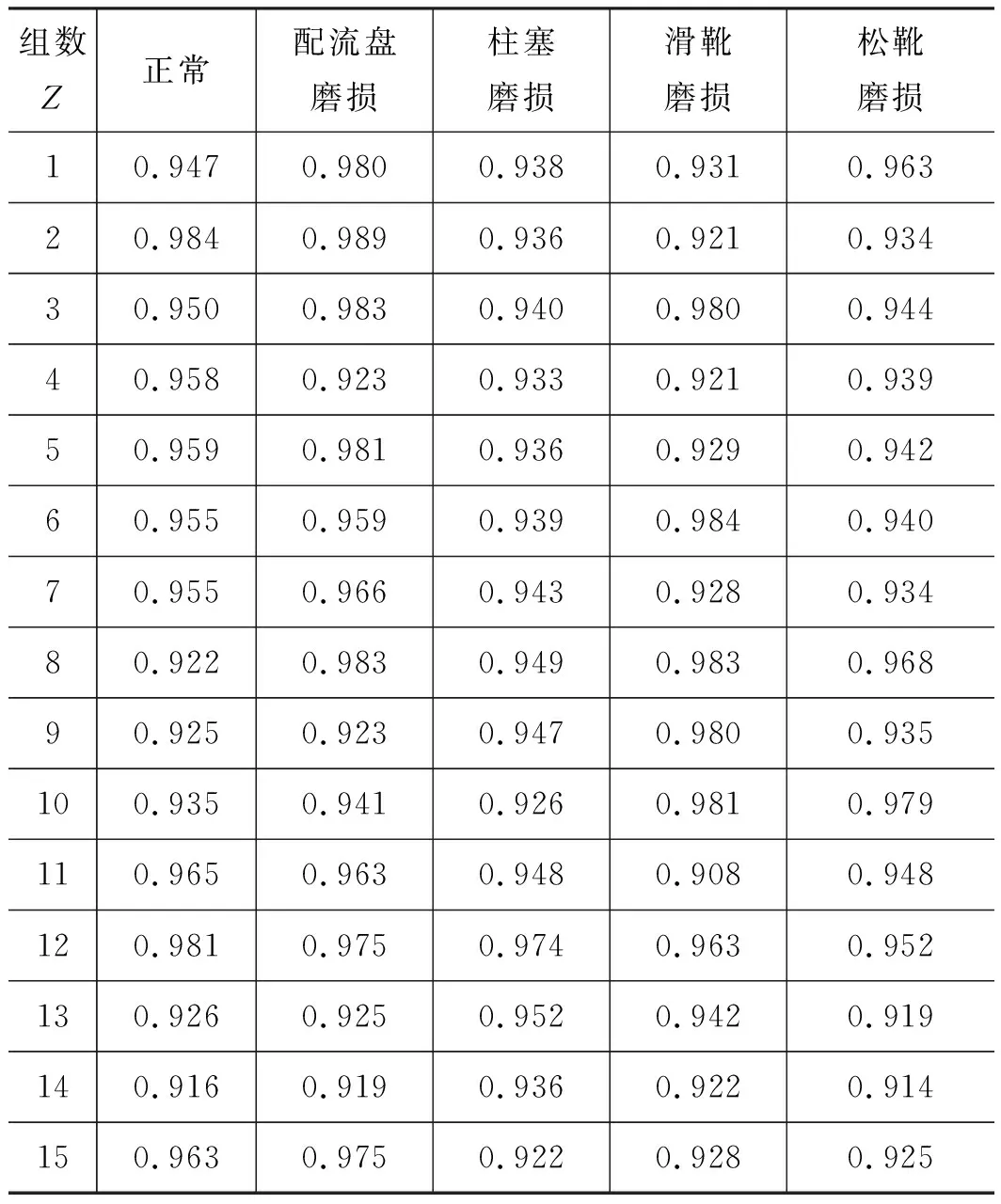
表2 重构信号与原始信号相关性
2.3 故障特征提取
图5给出了对柱塞泵5种工作状态下形成的振动信号进行预处理得到的样本熵值ζ曲线,结果显示,正常、松靴磨损与滑靴磨损状态下的原始信号发生了混叠情况。图6是利用LMD对柱塞泵各工作状态下形成的振动信号分解重构得到的样本熵值。通过对比发现,对滑靴磨损、柱塞磨损、正常状态下的振动信号进行LMD分解与重构处理后获得了不同的样本熵值,便于对其快速区分,同时发现配流盘磨损与松靴磨损间发生了轻微混叠。各状态重构信号样本熵形成了比原始信号样本熵更优的分布状态,说明LMD重构信号可以减弱噪声对故障特征提取造成的影响。
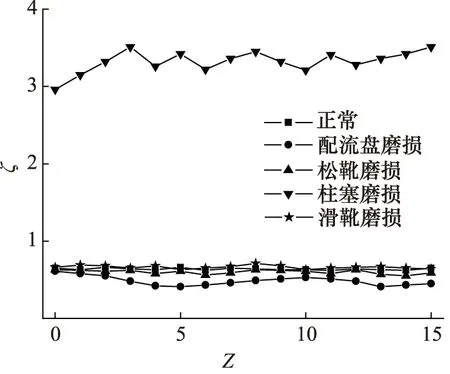
图5 原始信号样本熵值
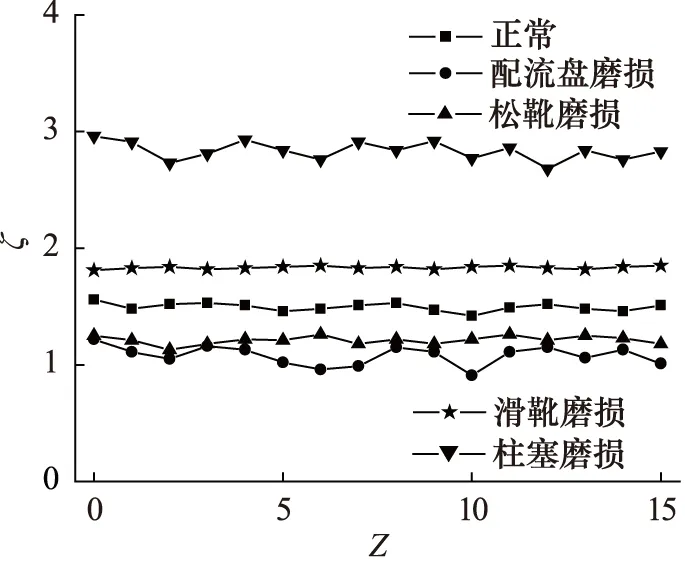
图6 重构信号样本熵值
3 故障诊断与对比分析
3.1 SVM多类分类器的构建
选择柱塞泵的同一种故障样本组成一类,以1进行表示,以剩余4种状态样本组成另一类,将其表示成-1。构建得到4个二分类器,分别为SVM1,SVM2,SVM3,SVM4,通过二叉树的方式对4个二分类器组合,建立得到能够对柱塞泵5种状态进行识别的SVM多类分类器,结果见图7。

图7 SVM多类分类器流程图
3.2 柱塞泵故障诊断
图8给出了对数据集进行训练测试所得结果,各组样本对应的类别B如下:正常状态包含0~40组,配流盘磨损包含40~80组,柱塞磨损包含80~120组,滑靴磨损2.5 mm包含120~160组,松靴磨损包含160~200组。根据图8可知,200组样本中只2个样本(柱塞磨损和松靴磨损)发生了识别错误,准确率高达99%,表明以SVM多类分类器可以获得较高故障识别诊断准确率。

图8 基于SVM的柱塞泵五种状态预测分类
3.3 对比分析
为了测试重构特征数据集有效性,在SVM多类分类器算法中输入重构信号特征向量数据集,再将其与原始信号集诊断结果进行对比,结果见表3。由表3可知:相对于原始信号,LMD重构信号达到了更高的训练准确度与测试准确性,表现出很好的计算精度。表明本研究LMD重构信号特征方法在处理柱塞泵故障诊断方面具有很好的效果。
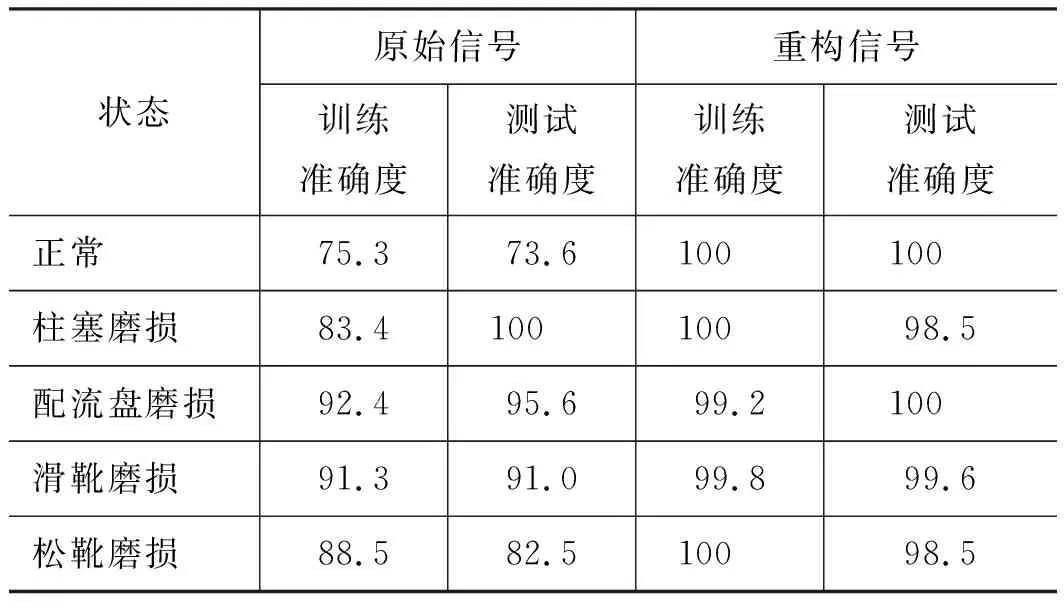
表3 准确度结果对比 %
4 结论
(1) 每种状态重构信号和原始信号之间的相关系数都达到0.9以上,说明重构信号内已经含有原始信号主要信息。各状态重构信号样本熵形成了比原始信号样本熵更优的分布状态,说明LMD重构信号可以减弱噪声对故障特征提取造成的影响。
(2) 200组样本中只2个样本(柱塞磨损和松靴磨损)发生了识别错误,准确率高达99%,表明以SVM多类分类器可以获得较高的故障识别诊断准确率。相对于原始信号,LMD重构信号达到了更高的训练准确度与测试准确性,表现出很好的计算精度。
