基于TruckSim仿真下弯道货车侧滑速度模型研究
2021-05-20潘兵宏单慧敏
潘兵宏,胡 炜,任 卉,单慧敏
(1.长安大学 公路学院,陕西 西安 710064;2.长安大学 特殊地区公路工程教育部重点实验室,陕西 西安 710064)
0 引 言
弯道路段交通事故的多发性、严重性引起了众多科研学者关注。据报道,2020年中发生在过弯区域交通事故高至4.5万起,多达1.8万人死亡,占道路交通事故的18.2%及事故死亡的23.1%,其中大都以载重车辆所引起[1]。从线形特征角度来评估,事故的主要原因是车辆转弯速度过快,前方道路状况不明,发生车辆侧滑和侧翻。
鉴于此,杨秀建等[2]用Simulink创建了非线性半挂汽车列车的力学模型,获得了额外横摆力矩作为提升车辆稳定性能的控制策略,但忽略了不同路面附着系数的的作用,在速度控制上缺少仿真分析;龙致宇[3]比较了各类算法的优劣性,仿真分析了多类工况下的半挂汽车的稳定性能,但研究未参考轮胎的非线性变化对车辆过弯稳定性的影响;张弛等[4]设立了车辆侧向滑移条件,研究了不同速度下六轴半挂车的极限半径值;唐歌腾等[5]以TruckSim构建了整车动力学数学模型,实施车速与半径的响应正交实验,确立了不同半径弯道上的临界速度值;曹中恒[6]逐步确定参数变化对目标汽车操纵稳定性能的影响,得出了车辆行驶稳定性改进参数方案,并证实了方案的合理性;张义花等[7]模拟了双挂汽车列车瞬时侧翻状态,根据TruckSim仿真实验,得到各自车速下的瞬态阶跃响应及其对应的参数值,据此判别各轴发生侧翻的先后次序;邵金菊等[8]在TruckSim平台上引入车辆悬架的动刚度及轮胎的非线性,交互仿真了多组弯道半径与附着系数,并确立了安全车速与附着系数、弯道半径的拟合模型,明确了弯道车速阈值;叶舒鉴[9]模拟再现了车辆发生侧翻和横摆运动失稳时的受力状态,总结了半挂汽车列车防侧翻控制方法,用3类工况进行了仿真验证,改进了侧翻控制策略;王传连等[10]引入车辆的装载工况与路面条件,运用TruckSim仿真分析车辆在过弯路段发生侧滑侧翻的影响因素及程度,明确双因素条件下的安全车速值;范李等[11]考虑了侧向载荷转移率、悬架运动等因素,改进原始横向力系数,建立了车辆急转工况下防侧翻临界车速计算模型;孙川等[12]在传统弯道安全车速计算模型中加入了车辆构造参数与驾驶员控制特性,归纳比较某型货车在不同工况下的车速安全值。
鉴于以上分析,多数模型在安全车速的计算上仍有不足,例如基于以半径、超高、路面附着系数等单一因素角度研究弯道极限速,较少考虑载荷转移等其他因素;或者未对车辆过弯时悬架运动与车辆质心偏移及侧倾关系进行评估;另外,忽略处理行驶中由车辆倾覆力矩和轮胎的非线性变形产生的车轮侧偏角及横摆角的变化,以至于模型的精确度值得商榷。实际中的车辆往往是先发生侧滑,现有侧翻模型计算的速度往往偏大,不利于驾驶员进行速度控制。由此,笔者在研究对象选取后应用 Trucksim软件建立了整车模型,仿真实验了多组不同弯道半径及重心高度;最终建立以安全车速为因变量,弯道半径、重心高度为自变量的多项式函数模型,讨论不同重心高度及弯道半径对安全车速临界值的影响。
1 基于Trucksim的车辆动力学模型
现今大型货车侧翻事故屡有发生,由于其车型大、质量重等因素,事故往往较为严重。据统计,货车作为中型载货工具,在高速公路货物运输中常作为主要车型,2019年末国内拥有载货汽车1 483.77万辆,比上年下降0.2%,约占公路营运汽车的93.25%,其中普通货车815.76万辆,约占货车总量的54.9%[13]。选取普通载重货车为研究对象,建立车体、悬架、转向及轮胎系统模型。
1.1 车体模型
车体模型构建将着重对载荷质量与非簧载质量的建模。载荷质量参数如表 1。
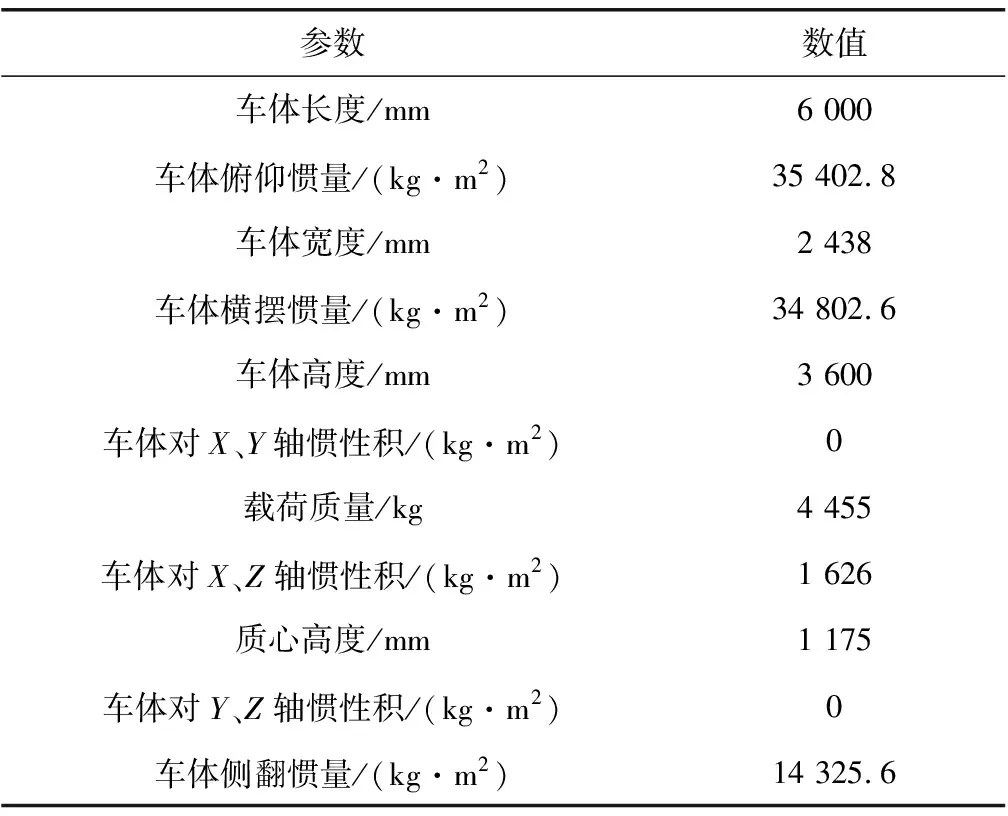
表1 车体模型参数
1.2 装载质量模型
货车的装载重心高度往往制约着车辆的行驶安全效应,故以装载状况对公路弯道路段安全速度的效应进行研究。在TruckSim软件中,采用规则的箱形装载进行建模。参数如表2。

表2 装载模型参数
1.3 悬架系统模型
Trucksim 软件悬架系统的建模着重是介绍车辆悬架系统的K&C特性。K&C非独立悬架模型参数如表3。

表3 K&C特性参数
1.4 转向系统
车辆转向系统着重于控制车辆行驶状态,采用的运动学特性K值和C值均采用系统默认值;另外,设置1∶25的传动比,内倾角定为7.2°,后倾角设为5.2°,横向偏移中心距离为100 mm。
1.5 轮胎建模
轮胎的非线性变化影响着驾驶的稳定性、安全性及平顺性。轮胎模拟参数如表4。
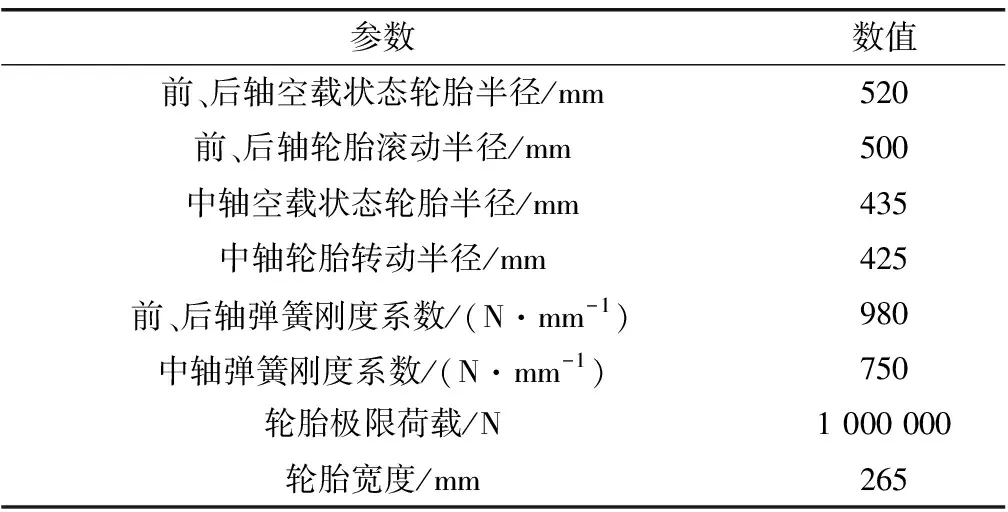
表4 轮胎模型参数
2 安全车速仿真
2.1 构建道路场景模型
基于TruckSim软件,从道路线形、路表附着系数、路面构造及环境来建立道路场景模型。研究弯道路段的安全车速限值,故基于研究路段平面几何特点,导入若干纬地软件生成的逐桩坐标,选取平直线与不同半径的圆曲线组成一系列实验路段。根据道路表面材质选取最为常见3种路面,所对应附着系数分别为:0.3(积雪路面)、0.5(土路)、0.7(沥青路面)。
2.2 驾驶策略模型
TruckSim软件中的驾驶策略模型主要包括速度、制动、换挡以及转向控制等。笔者在速度控制上选用预瞄驾驶控制,确定车辆安全车速阈值; 制动控制对车速阈值的效力不在研究的范围内,故选用无制动的开环控制; 换挡控制采取自动离合模式,驾驶路径为沿道路中线行驶,晴朗、无风环境;转向控制采用沿道路中线行驶的预瞄驾驶策略。在仿真实验之前,在纬地中设计出弯道半径50~320 m不等的9条弯道半径,同时重心高度设置为从1.4~3.6 m间隔0.2 m连续变量值。
2.3 侧翻侧滑指标的选取
横向载荷转移率的大小可以评估车辆侧翻失稳工况[14]。横向载荷转移率(PLTR)图能较好且动态反应出在不同参数交互组合效应下,路面车辆行驶是否有侧翻或侧滑的失稳状况,如式(1):
(1)
式中:FLi与FRi分别为第i根轴左右轮胎的垂直反力;n为车轴数;PLTR∈[-1,1]。
对于车辆侧翻的预测和控制,实际车辆运动状态十分复杂,且在侧翻临界点附近存在大量非线性关系,研究中忽略了次要因素,简化了轮胎的竖向力,突出侧翻中车辆受力状况,构建了三自由度的简化侧滑模型,如图1。
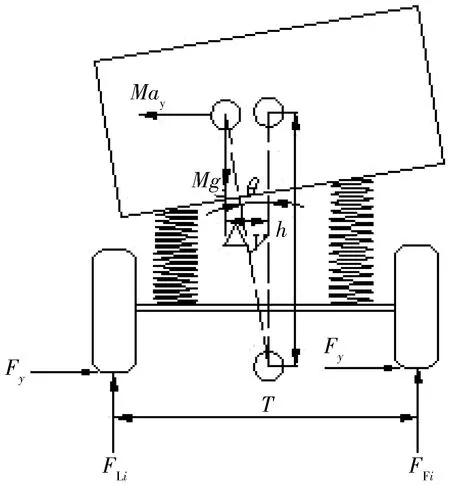
图1 货车稳态侧滑简化力学模型
由图1受力情况,对式(1)中的PLTR进行简化变换,如式(2)。为仿真结果和下一步的防侧滑控制奠定基础。
(2)
图1中,θ为侧倾角,ay为质心处侧向加速度,h为车辆重心高度,T为轮距,M为车辆的载荷质量,Δy是轮距中点相对于质心的偏移量。图1轮距中心点的力矩平衡式如式(3):
(3)
根据模型的分析,将式(2)、(3)代入式(1)中,得到PLTR的估计值的计算公式:
(4)
由图4中几何关系可得:
Δy=hsinθ
(5)
代入公式(4)得到简化公式:
(6)
由(6)式可知车辆直线行驶时,横向加速度及侧倾角为0,故PLTR≈0;车辆转弯时,车辆此刻有侧偏运动的倾向,横向加速度及侧倾角逐渐增大,PLTR≠0;在车辆将要发生侧翻,到达临界状态时,加速度及侧倾角最大,PLTR=±1。文献[11]指出PLTR=0.8、0.6时,车辆分别具有较高侧翻危险程度及侧翻趋势,定义为侧翻危险车速及侧翻预警车速;基于此特建立TruckSim/Simulink下PLTR的仿真模型,将PLTR=0.8时车速作为衡量车辆侧滑的危险车速,仿真模型如图2。
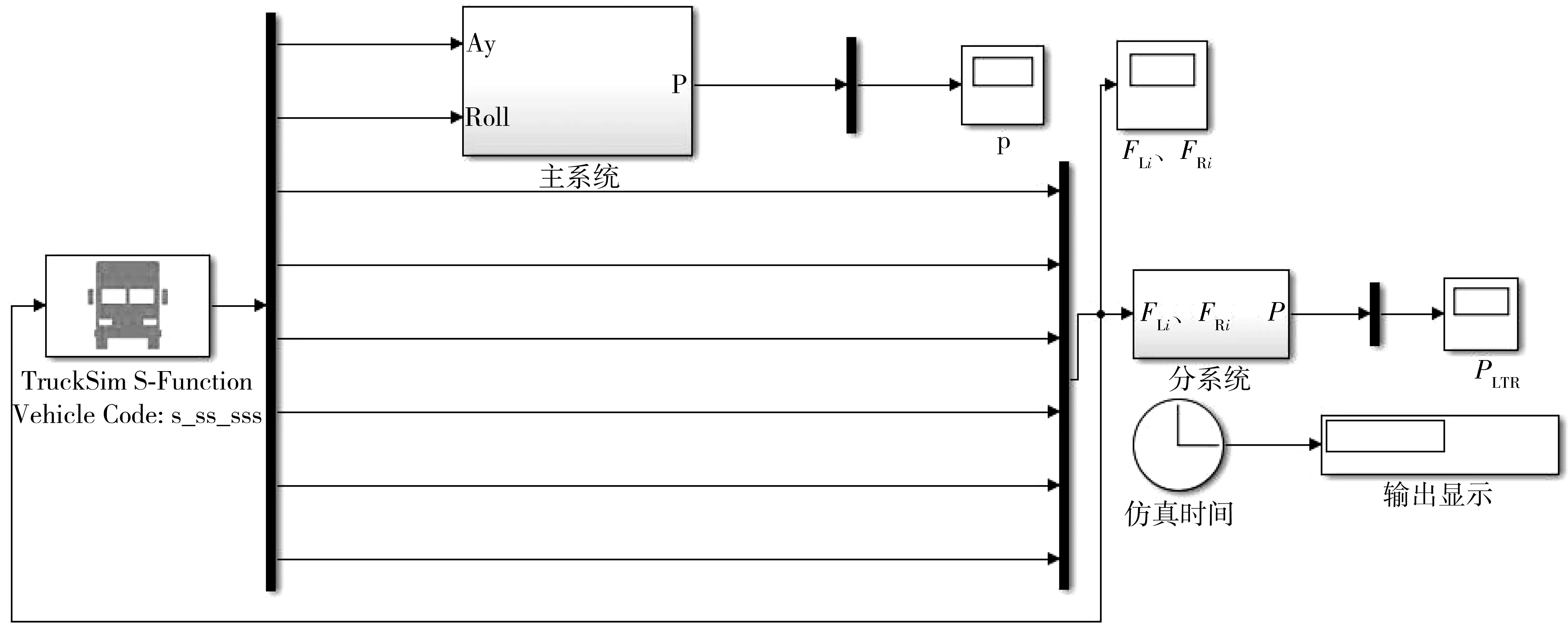
图2 3轴货车PLTR模型
参数组合仿真结束后,由模型得到横向偏移距离及车辆侧滑横向载荷转移率变化情况如图3,可观察弯道上行驶时车辆是否出现了侧滑的失稳情形;如不发生,将逐渐提升车速,达到失稳工况后停止并记录速度数据; 按以上步骤,交互仿真不同弯道半径及重心高度,得出其弯道安全速度。
由图3(a)可知,车辆以常量速度行驶时,大致10 s的横向载荷转移率为 0,车辆处在直线路段;车辆过弯时,横向载荷转移率陡然剧变,短时达到峰值,侧滑至侧翻等失稳情形发生。由图3(b)可知,车辆以常速行驶时,前10 s行驶在直线段的车辆处于稳定情形;以此速度过弯时,横向偏移距离形成波动,观察该时刻的横向载荷转移率,可知PLTR≤0.6,处于较为安全范围,车辆发生了侧滑;当PLTR≥0.8时,记录此刻发生侧滑的危险速度和车辆重心高度、弯道半径。

图3 仿真模拟结果
3 安全车速模型构建与分析
3.1 模型建立
根据TruckSim交互仿真实验得出的数据,绘制双因素作用下,车辆稳定过弯的安全车速阈值三维曲面,如图4。凭借MATLAB编程拟合出重心高度、弯道半径和安全车速的多项式函数,如式(7)~(9)。式(9)拟合图像代表附着系数0.7下沥青路面的安全车速拟合曲面,适合高速公路研究,具有普适性,如图5。
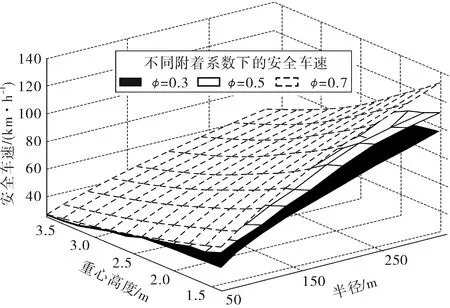
图4 不同附着系数下安全车速的三维曲面

图5 安全车速阈值拟合
V0.3=f(R,h)=19.45+0.38R+9.231h-0.000 3R2-0.035Rh-3.142h2
(7)
V0.5=f(R,h)=50.84+0.4R-12.24h-0.00025R2-0.05Rh+0.82h2
(8)
V0.7=f(R,h)=76.8+0.4922R-31.55h-0.0003R2-0.071Rh+4.148h2
(9)
式中:V0.3、V0.5、V0.7分别为路表附着系数φ=0.3、0.5、0.7下的安全车速;R为弯道半径;h为重心高度。
式(9)的确定系数R2=0.998 8,均方根RMSE=0.878 1,拟合结果合理。
根据SPSS二元方差及相关性分析,得到皮尔逊(Pearson)相关(如表5)[15]及安全速度分布(如图6)。
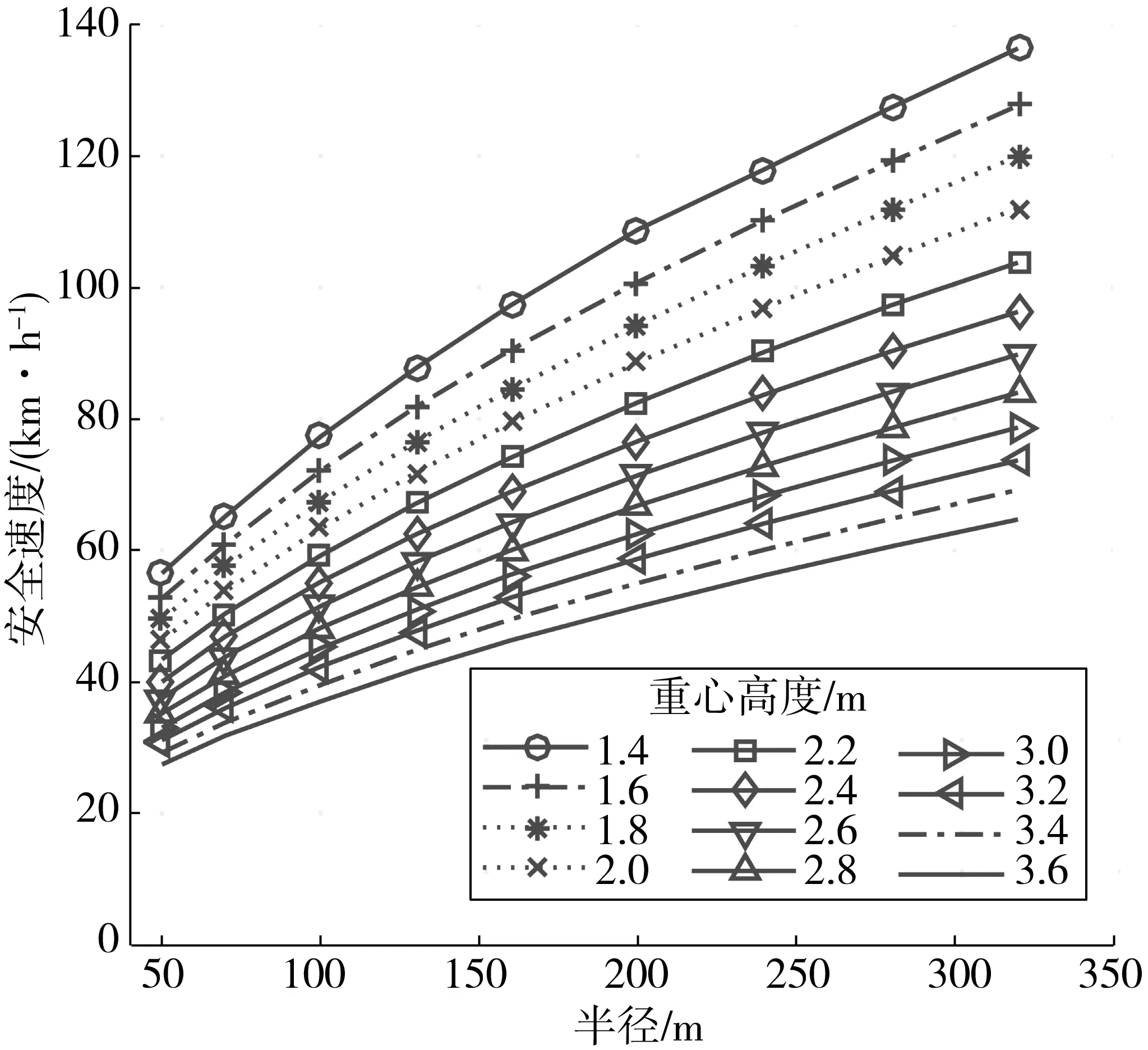
图6 不同重心高度下的安全速度分布

表5 皮尔逊(Pearson)相关表
由表5可知,安全速度与重心高度、弯道半径呈强相关。弯道半径与安全速度的相关性较大,呈正相关。重心高度与安全速度相关性较小,呈负相关。
由图6可知,在小弯道半径的曲线路段,重心高度对安全速度的影响较小,弯道半径对安全速度影响较大。随着半径的逐步增大,重心高度对安全速度的影响变大,此时不能忽略重心高度的负相关作用。
3.2 模型的有效性分析
对于在道路附着系数φ=0.3、0.5、0.7上建立车辆动力学和道路环境模型,货车的重心高度为1.8 m[16],此时式(7)~(9)的数学模型转变为:
V(R)0.3=f(R,1.8)=25.886-0.000 3R2+0.317R
(10)
V(R)0.5=f(R,1.8)=31.465-0.000 25R2+0.31R
(11)
V(R)0.7=f(R,1.8)=33.449 52-0.000 3R2+0.364 4R
(12)
筛选对应附着系数下的Lusetti模型[17]、Lee 模型[18]与侧滑车速拟合计算模型进行对比,佐证模型有效性。
图7为附着系数φ=0.3、0.5、0.7对应下安全车速V-弯道半径R关系,可知各模型计算得到的安全车速值随着弯道半径变大而提升。趋势表现在Lusetti模型增长最快,次之为侧滑车速拟合计算模型。侧滑模型拟合得到的安全车速曲线位于Lusetti、Lee模型两者之间,相对靠近 Lusetti模型,较为缓慢提升,Lee模型中安全速度提升则最为缓慢。

图7 安全车速随半径变化
3.3 模型准确度分析
采用横向载荷转移率模型来进行仿真验证车速模型,以防止实际车辆侧滑及侧翻的实验带来的危险性及不便性。
设定半径为300 m的弯道,附着系数为0.7,三轴货车重心高度为1.8 m,按照2节进行整车、装载质量、悬架系统、转向系统、轮胎、驾驶策略等模型构建。通过TruckSim-Simulink下PLTR的仿真模型,输出PLTR=0.8时所对应的车速,以此作为衡量车辆侧翻的危险车速。由PLTR模型仿真可得图8。计算出危险速度为116.1 km/h,并模拟出行驶时的所得PLTR值的变化曲线。
由图8可知,PLTR在0附近波动短时间后升到0.8,观察该车在第4.5 s以后为车辆极不稳定、处于横向侧滑的不安全情形,由PLTR模型仿真可得出侧滑危险车速为116.1 km/h。再通过上述拟合得到的安全车速数学模型,亦可求解得出为115.77 km/h的计算值;比较仿真试验所得116.1 km/h,数学模型有0.3%的误差。
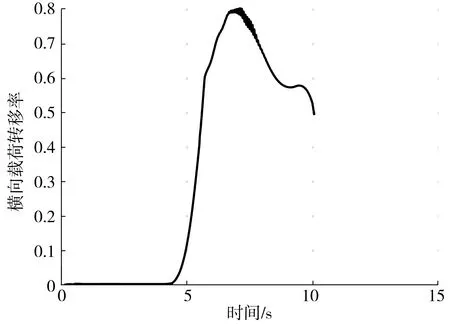
图8 横向载荷转移率(PLTR)
相比Lusetti模型所得出的137.5 km/h,模型计算误差从18.4%降低到了0.3%,较大的提高了模型准确度。
3.4 考虑纵坡的安全车速分析
选取沥青路面作为一般道路的路面类型,附着系数取为0.7,在TruckSim的路况设置中分别构建1%~8%的纵坡,同时根据第2节建立整车、装载质量、悬架系统、转向系统、轮胎、驾驶策略等模型。通过TruckSim-Simulink下PLTR的仿真模型,输出PLTR=0.8时所对应的车速,如图9。

图9 不同纵坡下的安全车速变化
在缓坡路况下,小半径圆曲线的车速安全值较大,随着纵坡的增大,安全车速值的降低幅度较大;对于大半径圆曲线,安全车速值则受纵坡影响较小。因此,在设置急弯陡坡的道路上行驶时,车辆极易发生侧滑甚至侧翻。
3.5 限速建议
车辆在小半径(R=50、70、100 m)圆曲线上行驶时,所对应的限速值区间分别为[11.4 48.5]、[19.5 56.8]、[31.6 67.3], 稍低于JTG D20—2017《公路路线设计规范》中圆曲线半径对于设计速度选择的规定,偏于安全。建议在不同急弯陡坡路段设置限速标识牌,以提醒驾驶员谨慎驾驶。
4 结 语
1)笔者在TruckSim软件中全面地考虑了某三轴车辆的悬架动刚度特性、车身侧倾角度、轮胎非线性特性,建立了整车动力学、道路场景、驾驶策略及横向载荷转移率(PLTR)模型。交互式仿真实验了多组不同弯道半径、重心高度,得到预期的安全车速值。
2)比较弯道侧滑车速模型与现有安全车速计算模型,发现笔者模型拟合得到的安全车速曲线位于Lusetti、Lee模型两者之间。此外,实例论证了附着系数为0.7、转弯半径为300 m的弯道仿真实验下所得出的的安全车速值,对比结果表明: Lusetti模型的计算误差为18.4%,侧滑模型的计算误差仅有0.3%,可见模型的计算精度较高。
3)安全速度与重心高度、弯道半径呈现不同程度的相关性,两因素均与安全速度呈强相关。其中弯道半径与安全速度的相关性较大,呈正相关。重心高度相关性较小,呈负相关。在小弯道半径的曲线路段,重心高度对安全速度的影响较小,此时弯道半径对安全速度的影响较大。随着半径的逐步增大,重心高度对安全速度的影响变大,此时不能忽略重心高度的负相关作用;同时随着纵坡的增大,小半径圆曲线安全车速减小幅值增大,在设置急弯陡坡的道路上行驶时,车辆极易发生侧滑甚至侧翻;建议在不同急弯陡坡路段设置限速标识牌,以提醒驾驶员谨慎驾驶。
