城市轨道交通列车故障救援延误计算与仿真
2021-05-20孙元广陈绍宽
孙元广,茧 敏,金 华,陈绍宽
(1.广州地铁设计研究院股份有限公司,广东 广州 510010;2.北京交通大学 交通运输部综合交通运输大数据应用技术交通运输行业重点实验室,北京 100044)
0 引 言
城市轨道交通系统运营过程中如发生列车故障,将会影响正常运营降低服务质量。列车故障如无法在短时间内排除,行车调度员需根据故障情况进行运营调整,对故障列车进行救援,即利用其他列车或者工程车将故障车移出正线。
国外研究主要针对运营干扰或中断后的恢复调整与故障分析。V.CACCHIANI等[1]对铁路系统的扰动和干扰管理与恢复算法进行研究,将系统故障分为干扰和中断;GAO Yuan等[2]对地铁列车运行中断后的运行线路重排问题进行研究,将非正常运行图分为故障阶段和恢复阶段进行分析;XU Xiaojie等[3]在分析列车运行中干扰管理问题中,认为故障可分为由乘客上下车、区间限速或计划维修引起的延误,以及由安全制动、子系统失效或事故等系统异常导致的运营中断;ZHAN Shuguang等[4]则将故障中断定为运营区段的完全阻断。国外研究较少关注列车故障救援组织优化与决策。
同时,国内关于城市轨道交通列车故障救援的研究主要集中在两个方面:① 针对故障停车线,分别从宏观角度研究其布局和微观角度分析其设置形式与运用。付意庄[5]从停车线备车角度对停车线设置位置与客流因素进行了分析;郭彦东[6]根据呼和浩特1号线线路及客流数据,验证了双列位停车线的适用性;② 针对列车故障救援组织进行分析并提出相关优化建议。陈颖斌等[7]对城轨列车故障救援的规程、人员操作和设施设备进行了分析;邹冉[8]则对列车故障救援的影响因素和延误效率进行分析,提出了提高救援效率的对策及建议。此外,王宏刚等[9]对列车运行状况的影响因素进行分析,建立基于MLD理论的列车运行调度模型。总体而言,现有研究多侧重于基础设施、救援组织的定性分析以及列车的运行调整,缺少救援方式的具体划分及影响的定量研究。
笔者对列车故障救援流程进行分析,按照救援列车选择、救援车组运行状态和故障列车停放位置这3类指标,对列车故障救援方式进行划分,计算各救援方式所产生的延误,并应用Open track软件进行仿真验证,为列车故障救援方案选择提供依据。
1 故障救援作业分析
列车故障救援是指列车因动力或制动故障而无法继续运营,需借助救援列车退出正线运营的行车组织[10],救援可划分为故障列车自救阶段和救援列车救助阶段。故障车自救阶段作业包括故障列车司机自救与技术协助处理。司机若无法完成自救,行车调度发布救援与清客命令,故障列车(位于车站附近)完成清客作业,与救援车进行联系并实施防护。救援列车司机了解救援情况并准备接受行调命令(如清客命令、接受救援命令、生效动车命令),随后将救援列车运行至故障列车位置并与其进行连挂、试拉。救援车与故障车完成连挂后需要切除故障车常用制动,随后运行至停放位置。
根据故障位置,列车故障救援分为区间救援和车站救援,故障列车和救援列车作业流程和时间如图1。故障车完成清客作业后需等待救援车到达,由图1可知,救援列车和故障列车完成连挂动车前的作业时间计算如式(1),该作业时间的瓶颈为救援列车作业。救援列车的作业时间组成如式(2)[8]:

图1 不同位置列车故障救援作业情况
T作业时间=max[T故障列车作业,T救援列车作业]
(1)
(2)
式中:T作业时间为救援作业的总时间;T故障列车作业为故障列车作业的总时间,包括故障列车司机判断及处理、技术协助下故障处理、行车调度发布救援命令、故障列车清客作业和联系及列车防护作业时间;T救援列车作业为救援列车的作业的总时间,包括了解救援情况、行车调度发布救援命令、救援列车清客、运行至故障位置和连挂故障车并试拉的时间;T固定作业时间为固定作业的时间,包括了解救援情况、行车调度发布救援命令、救援列车清客和连挂故障车并试拉;l救—故为救援列车与故障列车间的距离;v救援为救援列车平均运行速度。
由式(2)可知,救援列车的运行时间与救援列车与故障列车的间距和救援列车平均运行速度有关。以1~10 km间距和10~80 km/h的速度范围得到图2。由2图可知,随着救援列车到达故障点速度的增加,救援列车作业时间先迅速减小后趋于平缓,说明在一定范围内,提高救援速度可以有效减小救援列车作业时间。若列车故障救援作业时间上限取1 800 s[11],救援列车与故障列车连挂完成前的作业时间约为720 s,则救援车组的运行时间约为1 080 s。图2中各救援距离的时间曲线,与最大运行时间的交点所对应的救援速度,为该救援距离下的速度下限。完成连挂后的救援车组从故障位置到停放位置的旅行速度,应大于该速度下限,以保障救援作业时间。
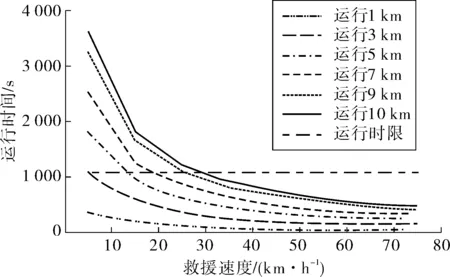
图2 救援距离与救援速度关系
2 故障救援方式与救援延误计算
列车故障救援方式可按救援车组的运行方向可分为牵引救援和推送救援;按停放位置可分为车辆段停放救援和配线停放救援,其中用于停放故障车的配线为停车线、折返线及越行线[12]。此外,轨道交通故障救援列车还可用车站配线存放。车辆段停放模式中故障车组运行至车辆段后影响完全消除,暂存于配线则影响未被完全消除。对于救援列车的选择,一般选择前序列车(或邻线折返列车),后序列车承担救援任务,但救援处置中不扣停前序列车而扣停后序列车。此外,救援车组推送运行通常不存在敌对方向,安全性较高。故障车辆存放于车辆段或停车场时不存在二次延误,且便于车辆维修;而存放于配线存在二次延误,不便于列车维修[10]。
列车救援方式的组合要素包括救援列车种类(后序列车、前序列车和邻线列车)、车组运行方向(正向运行、反向运行和混合运行)和故障列车的停放位置(车辆段、停车场、单/双列位停车线和车站配线)。后序列车救援优点为安全性较高,救援方式为推送、牵引和对向救援;前序列车救援的优势是正向救援时采用牵引运行,牵引速度一般情况下大于推送速度,通常可以达到40~45 km/h[13],可减少正线运营的干扰;对于反向和对向救援,前序列车救援以推送为主,因增加延误较少使用。
邻线列车救援会对邻线列车运营产生干扰,使邻线救援列车接近并与连挂的过程产生更大的延误。因而邻线正向救援过程中采用牵引模式以增加速度,减少对本线运营的干扰。因此,前序列车和邻线列车救援通常都采用正向运行方向。
笔者主要讨论5种救援方式:后序列车正向救援、后序列车反向救援、后序列车对向救援、前序列车正向救援以及对向列车正向救援;救援车组目的地分别是:车辆段、贯通式单列位停车线、贯通式双列位停车线、尽头式单列位停车线、尽头式双列位停车线。
2.1 救援作业分析
救援作业中流程中,图中符号含义如表1。
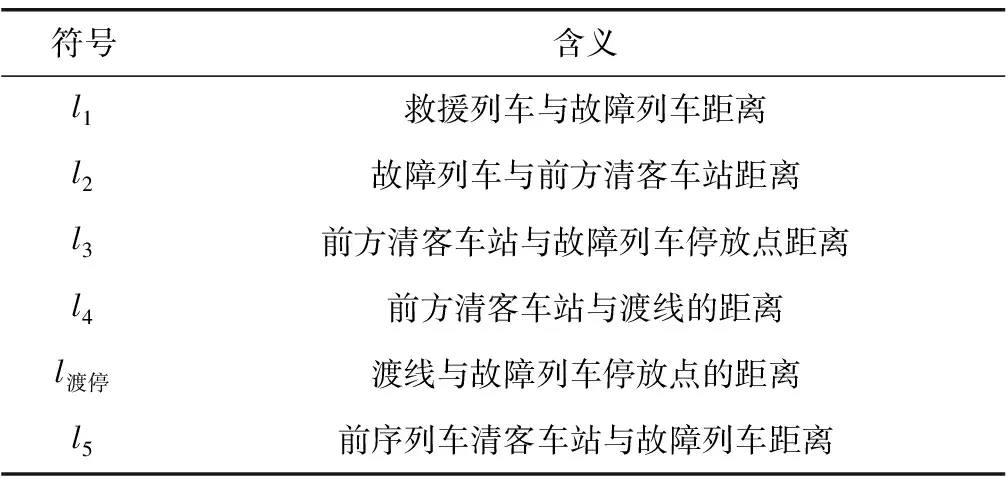
表1 各符号含义
2.1.1 后序列车正向救援
后序列车正向救援作业流程如图3,主要作业内容包括:① 故障判断与命令发布、② 故障处理与清客、③ 后续列车接近救援列车、④ 救援车与故障车连挂、⑤ 推送运行到前方站、⑥ 故障车在前方站清客和⑦ 推送到停放地点。

图3 后序列车正向救援流程
2.1.2 后序列车反向救援
后序列车反向救援流程如图4,作业内容包括:① 故障判断与命令发布、② 故障处理与清客、③ 后续列车接近救援列车、④ 救援车与故障车连挂、⑤ 逆向牵引到后方站、⑥ 故障车在后方站清客和⑦ 牵引到停放地点。
图4 后序列车反向救援流程
2.1.3 后序列车对向救援
后序列车对向救援作业流程如图5。作业内容包括:① 故障判断与命令发布、② 故障处理与清客、③ 后序列车接近救援列车、④ 救援车与故障车连挂、⑤ 推送运行到前方站、⑥ 故障车在前方站清客、⑦ 推送到渡线、⑧ 换端与径路安排和⑨ 救援列车从渡线到停放地点。

图5 后序列车对向救援流程
2.1.4 前序列车正向救援
前序列车正向救援作业流程如图6。作业内容包括:① 故障判断及救援命令发出、② 前序列车清客、③ 前序列车接近、④ 救援车与故障车连挂、⑤ 牵引运行到前方站、⑥ 故障车在前方站清客和⑦ 牵引到停放地点。

图6 前序列车正向救援流程
2.1.5 对向列车正向救援
对向列车正向救援作业流程如图7,作业内容包括:① 故障判断与命令发布、② 前序救援列车到达渡线、③ 救援列车到达前序车站、④ 清客、⑤ 救援列车接近故障列车、⑥ 救援车与故障车连挂、⑦ 牵引运行到前方站、⑧ 故障车在前方站清客和⑨牵引到停放地点。

图7 对向列车正向救援流程
2.2 救援延误计算
列车故障救援延误时间分为一次延误和二次延误两部分。一次延误是指,从故障发生到救援列车将故障列车救援至停放位置产生的延误;二次延误是指,从救援列车将故障列车救援至停放位置至救援列车完成救援(救援列车可恢复运营或临时停放在停放点)产生的延误。其中一次延误由救援列车选择、车组运行方向以及故障列车停放点的位置决定,二次延误则由故障列车停放点的类型决定。
2.2.1 一次延误
以救援车组(救援列车与故障列车完成连挂的车组)动车为时间节点,列车故障救援的一次延误计算如式(3):
(3)
式中:T救援列车作业为救援列车的作业时间;T救援车组作业为救援车组作业时间;xi为0或1,表示是否有救援车组动车后的延误修正;l故停为故障点到停放点的距离;v后车为故障车组后方列车的平均运行速度;Δh为后方列车运行的追踪间隔与原间隔的差。
考虑到正向救援,列车将故障列车推送至停放位置时,后序列车可在保持一定追踪距离的前提下跟随救援列车前进,因此延误要减去后序列车跟随前进节省的时间l故停/v旅行(此时后续列车的旅行速度受限制)。故障列车的追踪间隔应减去追踪间隔变化的差异h1-h2。因此,后序列车正向救援的一次延误时间如式(4):
(4)
式中:t判断为故障判断时间;t后清为后序救援列车的清客时间;l故后为故障列车离后方车站的距离;v接近为救援列车接近故障列车的平均速度;t连挂为救援列车与故障列车的连挂作业时间;l故停为故障列车与停放点的距离;v推送为连挂后救援列车推送的平均速度;t清客为故障列车的清客时间;v旅行为正常情况下的平均旅行速度;h1为正常情况下的列车追踪间隔;h2为后序列车与救援列车之间的追踪间隔。
反向救援列车的后序列车在救援过程中须原地等待,因此不需对后序列车前进进行修正。从安全角度考虑,不允许停放位置在救援列车的后序列车之后,防止产生冲突。后序列车反向救援的一次延误时间如式(5):
(5)
式中:v牵引为连挂后救援列车的平均牵引速度。
同样对于正向运行,延误应减去后序列车跟随前进节省的时间l故渡/v旅行,此外还应减去追踪间隔变化的差异h1-h2。对于对线也是同样处理,延误要减去l渡停/v旅行,不同的是由于不知道救援列车折返时对线后序列车的位置,可能在离渡线0至h1的任何一个位置,这里定为其位置的期望h1/2,因此追踪间隔变化的差异为h1/2-h2。后序列车对向救援的一次延误时间如式(6):
(6)
式中:l故渡为故障列车与渡线的距离;l故渡为故障列车与渡线的距离。
与后序列车正向救援相比,主要区别在于前序列车不扣停,离故障列车较远,接近时间长,但连挂之后牵引运行,速度更快。前序列车正向救援的一次延误时间如式(7):
(7)
式中:t前清为前序列车的清客时间;l前清故为前序列车清客车站到故障列车的距离。
与后序列车正向救援类似,应减去追踪间隔变化的差异h1-h2,连挂作业的流程和时间不同。对向列车正向救援的一次延误时间如式(8):
(8)
式中:l清渡为清客车站与渡线的距离;l故前为故障列车与前方车站的距离。
2.2.2 二次延误
1)无二次延误
对于双列位的停车线和车辆段,当救援列车和故障列车进入后,正线即可恢复正常运营,不存在二次延误的情况。如果救援列车需要恢复运营,可通过调整列车间隔,在合适的时候投入运营,对正线的影响较小,笔者忽略此影响。因此车辆段、贯通式双列位停车线和尽头式双列位停车线不产生二次延误。
2)贯通式单列位停车线
贯通式单列位停车线两端与正线连通,救援列车正向和反向救援均可直接进入,仅区分推送救援和牵引救援。推送救援如图8,救援列车在摘钩换端之后返回正线,之后再次换端,恢复运营,二次延误时间如式(9);牵引救援过程如图8,救援列车无需换端,二次延误较少。
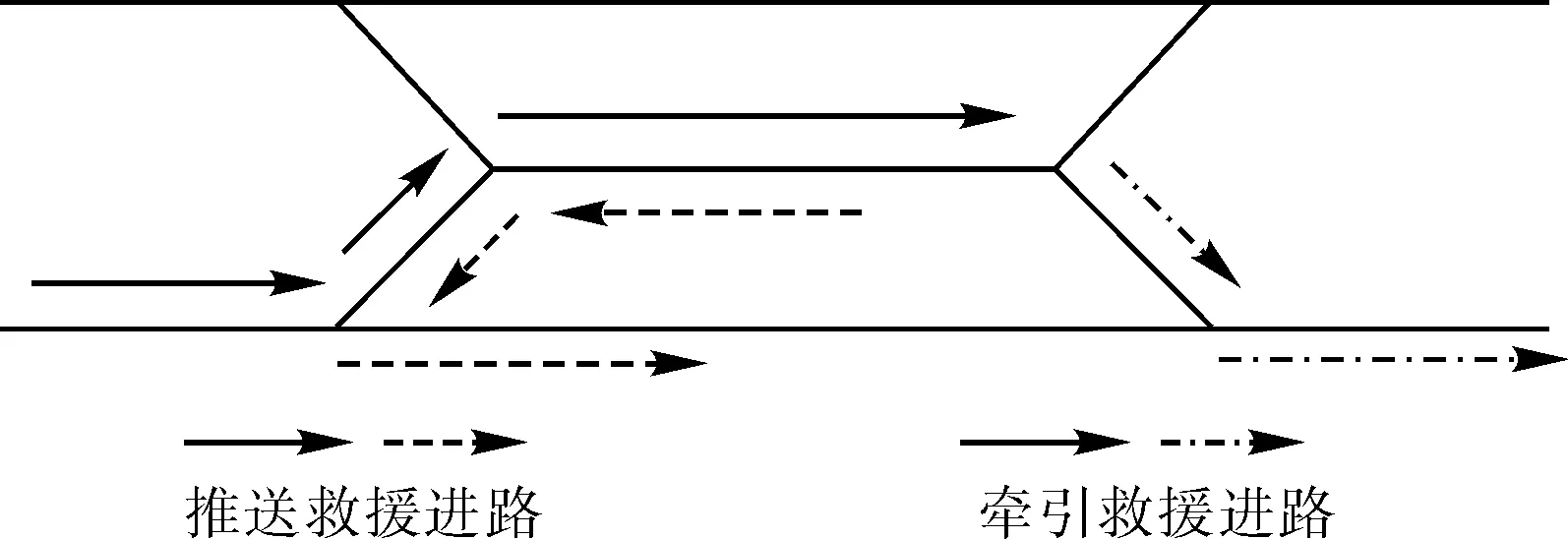
图8 单列位停车线故障列车停放进路
(9)
3)尽头式单列位停车线
向尽头式单列位停车线推送救援,救援列车摘钩后换端返回正线,再次换端恢复运营,此条件下无法进行牵引救援。二次延误如式(10):
(10)
对于任意一个救援方案j,设其救援方案路径选择类型为kj,停放位置类型为lj,则其延误计算如式(11):
Dj=T1,kj+T2,lj
(11)
3 救援延误仿真分析
针对不同救援方式的延误计算结果,笔者应用Open track软件结合实际线路开展仿真验证,分析计算延误与仿真延误的差异及产生原因。
以福州市某轨道交通线路部分区间为研究对象。线路区段起于A站,终于E站,总长8 268.7 m;共设站5座,平均站间距2 067 m,D-E区间站间距最大为3 088 m,B-C区间站间距最小为1 270 m;A-B区间站间旅行速度最大为82.3 km/h,B-C区间站间旅行速度最小为38.4 km/h。该区段故障车停放点为A站右侧尽端式交叉渡线折返线和E站后的停车场,区段线路如图9。各区间牵引救援和推送救援的速度如表2。

图9 区间线路

表2 站间距与救援速度
仿真的救援情景为列车在车站B出现故障无法动车,需救援列车进行救援,救援过程涉及列车数量为5列,具体情况如表3。

表3 采用仿真列车说明
笔者研究计算延误和仿真分析相关作业参数及取值如表4。
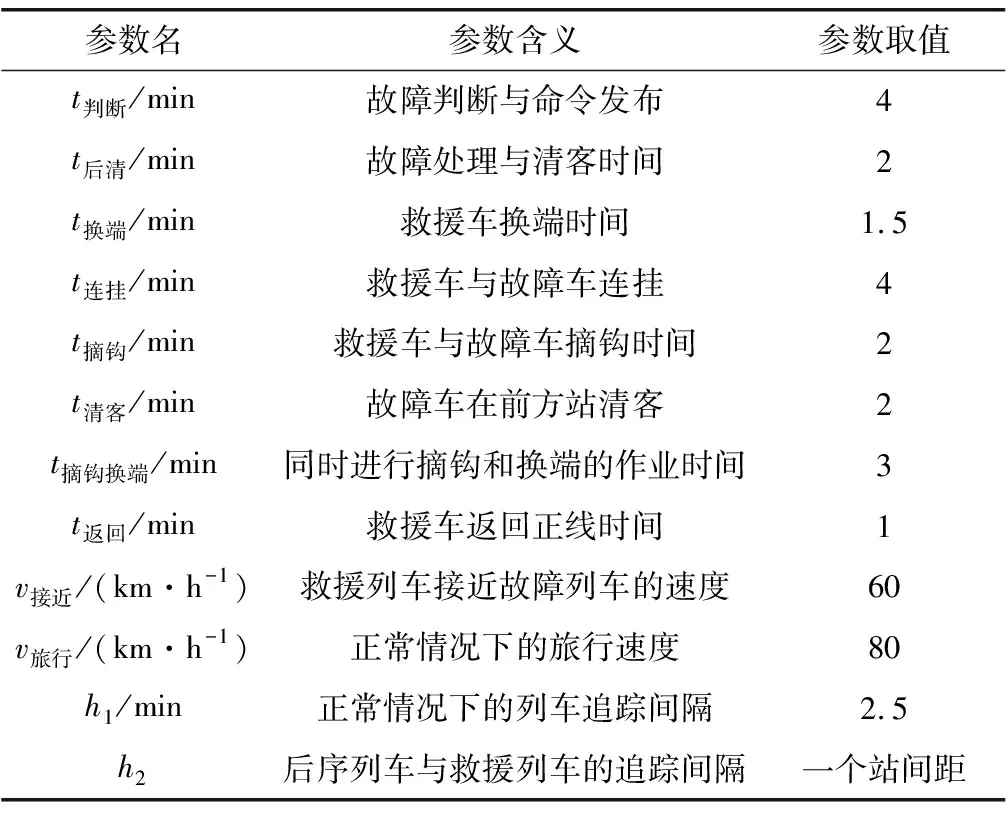
表4 列车故障救援仿真分析相关参数
延误计算结果与仿真结果如表5,其中仿真结果为后序列车1在各站的平均延误时间,二者相对误差在0.66~9.80%范围。后序列车对向救援的平均延误统计对象为上行后序列车1,未对邻线列车延误进行统计,与理论计算存在差异较大,但后序列车对向救援影响范围为本向和对向线路,其延误情况可放大。综上,笔者方法可较为准确地计算列车故障救援延误。

表5 仿真结果与计算结果对比
从仿真结果可知,后序列车正向救援的平均延误最大,前序列车和对向列车正向救援延误最小。后序列车正向救援因以后序列车为救援车,救援车组以低速运行至停放点(切除ATP保护下,救援车组以固定闭塞运行时限速为25 km/h),产生较大延误;前序列车和对向列车正向救援因采取牵引运行,救援车组以较高速度(限速为40 km/h)运行至停放点,产生延误较小。此外,对同一故障点B分别采用5种救援方式进行仿真,救援列车的后序列车在各站延误的统计结果如图10。由图10可知,因救援起讫点存在救援作业,上行后序列车1在救援起点B站和终点E站前均会产生延误突增;且因运行速度低,后序列车正向和反向救援使列车在终点E站前延误累积过多,突增幅度较大。
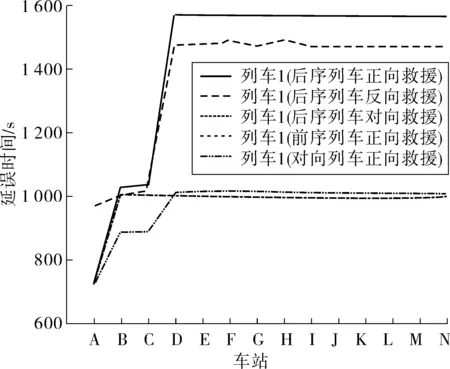
图10 后序列车各站延误
4 结 语
笔者对城市轨道交通列车故障救援作业流程和救援方式所造成的延误进行分析和计算,并对救援作业中常用的后序列车正向推送救援的适用情况进行了分析,结论如下:
1)随着救援列车到达故障点速度的增加,救援列车作业时间先迅速减小后趋于平缓,说明在一定范围内提高救援速度可以有效减小救援列车作业时间。
2)各救援方式的延误情况分析与计算进行的仿真验证表明笔者所提出的计算方法相对误差在0.66%~9.80%,可较为准确地反映延误情况。
3)在救援起讫点范围内,以固定闭塞运行的后序列车会出现延误突增,且因延误累积,造成延误增幅差异。
