路域无关信息域对驾驶人注视行为的影响
2021-05-08沈一川
沈一川
(1.同济大学建筑设计研究院(集团)有限公司;2.上海智慧交通安全驾驶工程技术研究中心)
1 引言
安全与效率在道路交通系统中深度耦合。驾驶人、车辆和道路交通环境构成了道路交通系统的三要素,道路用户主观安全感受与道路交通设施客观行车条件的相互作用构成道路交通安全系统的“主—客观安全性”[1],两者的相互平衡是道路交通运行安全的基础。驾驶人失误作为引发道路交通事故的主要原因已被世界各国所公认,随着车辆智能化交互内容的迅猛增多,智慧交通设施信息知识获取数量的快速增加,驾驶人面对的车辆内外部驾驶环境呈多样化、复杂化的变化趋势,从而导致驾驶负荷过高、注意力分散和应对突发事件处理能力的下降。为实现道路交通系统的安全化功能,对驾驶行为的形成、驾驶行为与道路交通环境的关系进行分析、测试、建模、仿真和试验的研究,对道路交通事故诱发原因的辨识、预防和控制极为重要。
由交通环境和自然环境共同构成的路域环境对交通安全的影响分为:
①自然环境本身沿线的变化对道路用户心理的作用(吸引);
②道路交通基础设施与自然环境的和谐性。
进一步论证:人有被外界环境吸引并获取信息(文字、图像等)的本能,围绕驾驶人,由外部事物所承载的对驾驶人行为和感受产生影响且不属于交通信息本身的信息区域范围,即为无关信息域(Irrelevant Information Range,IIR),如:属于自然环境范畴内的人文环境、道路周边广告标牌设施[2]、夜间路侧闪烁的霓虹灯等等。这些无关信息域对驾驶本身并不产生直接交通行为,却能够通过一种或多种方式获得驾驶人对文字、图像、视频、灯光等信息的被动提取、筛选与处理,在视觉任务层面导致驾驶人行为的变化。
目前,对驾驶人视觉指标的试验研究采用各类眼动仪实现,一般分为接触式、非接触式和遥感式设备。考虑驾驶人视觉特征变化为出发点,对受试驾驶人注视点落点位置精度要求较高,基于与同济大学交通运输工程学院的产学研合作,通过接触式眼动追踪系统开展高速公路实车试验研究,试验设备见图1,试验里程约95.0km,并利用马尔可夫链的注视转移模型分析路域无关信息域对驾驶人造成的不同视觉转移方式。
2 注视行为
眼动(eye movements)是视觉过程的直接反应,是可探测的视认活动中的即时加工过程,它受多种认知因素的影响,与眼球的运动与注意、预期、记忆、推理、阅读等认知活动有密切关系。在车辆行进方向,两眼所形成视野夹角的那一点称为注视点。在结合过往研究对驾驶人视觉兴趣区域划分的基础上,对本研究试验驾驶人兴趣区域进行合理划分。

图1 接触式眼动追踪系统
2.1 视点兴趣区域划分
驾驶人行车过程中,需要不断地从周围环境摄取信息,为自身定制相应驾驶行为策略提供客观依据。驾驶人对外界信息的提取过程是一种选择性注意方式,因此驾驶人的注意力并不会平均分配到各个注视目标上,而是最终动态聚集在几个相关区域,即被称为兴趣区域。基于单个驾驶人注视点的分析无法准确提取驾驶人的视觉搜索规律,而通过划分兴趣区域则将研究对象由点及面,可以满足研究人员的灵活需求,从而降低了提取驾驶人行车过程中注视转移特性规律的难度。
2.1.1 过往研究划分方法
过往研究对驾驶人兴趣区域的划分主要分为视野平面划分方法和动态聚类法。
通过视野平面划分法的主要有GeoffreyUnderwood等人对车外视野划分的9个均等且互不重叠的驾驶区域[3];Bao Shan等人着重依据头部偏移等方式划分的7个区域(包括车内区域)[4];M.Fitch等人在100Car自然驾驶试验中更为细致地将驾驶人兴趣区域划分为:左前、正前、右前、左窗、右窗、左后视镜、右后视镜、内后视镜等区域[5]。
动态聚类划分方法以长安大学袁伟[6]的研究为代表,将试验获得的驾驶人在主视区平面上的注视点坐标运用动态聚类法聚为6类,每一类分别表示不同的注视区域。计算得到的兴趣区域包括了左后视镜区域、主视区左侧、中央主视区、主视区右侧、右后视镜区域以及车内仪表区域。
2.1.2 本研究兴趣区域划分
比对两种划分兴趣区域的方法,各有其优势,动态聚类法精确度及效率均较高,可以避免因研究者过于主观的区域划分导致研究结论与驾驶人真实的注视特性产生偏差;视野平面划分法的优势是可以基于研究者的特殊兴趣及需求灵活地进行区域划分,从而使研究结论更契合自身的现实需要。本研究有明确的路域视野界定,故拟采用视野平面法着重按照研究对象对兴趣区域进行有效的划分。无关信息域是本次试验研究的客观主体,在划分时,将从属于无关信息域的所有内容分为一类,便于找出驾驶人的视线在道路上与无关信息域之间转换的规律。将常规驾驶操控车辆时需要关注的道路路面、周边车辆分别分为一类,将左右后视镜分为一类(避免扫视后视镜行为对本次研究产生干扰),并将其他对本次研究不产生重要影响的区域归为一类,具体的兴趣区域划分方式见图2,数据标定软件界面见图3,各区域囊括的主要注视目标物见表1。
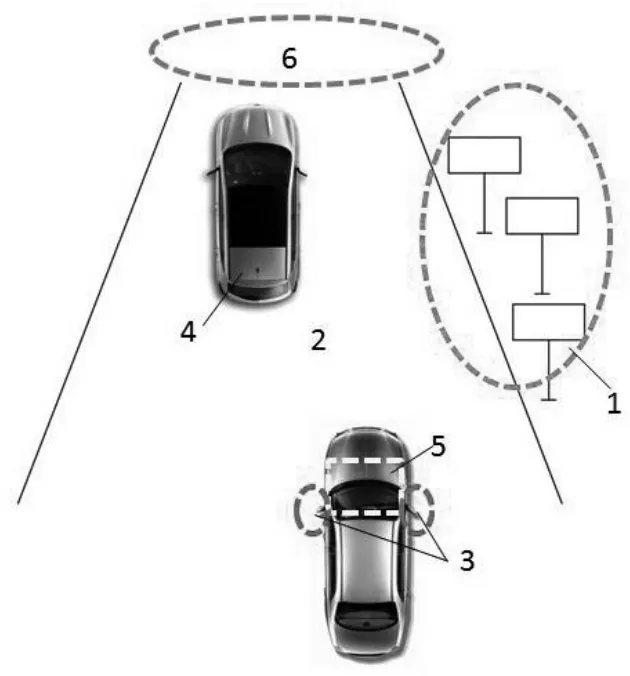
图2 驾驶人注视点兴趣区域划分图
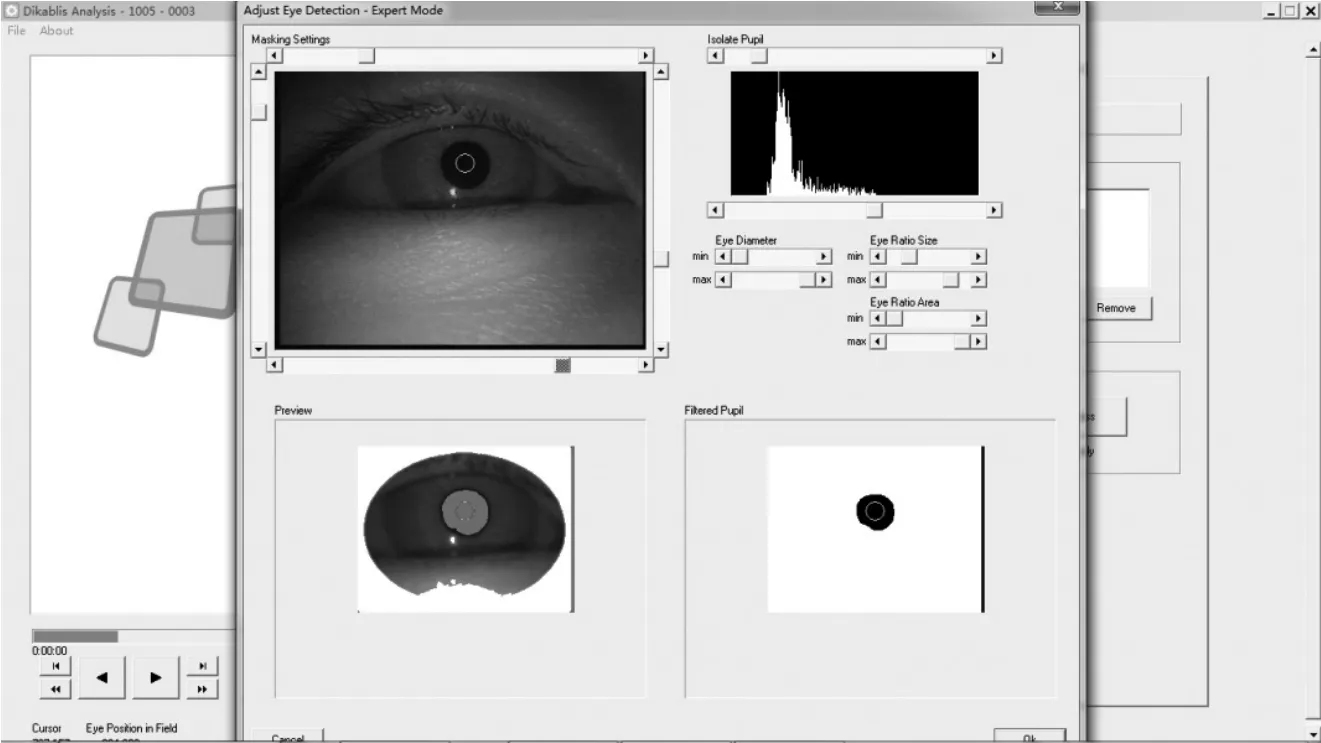
图3 驾驶人注视点标定界面图

表1 驾驶人注视区域划分表
2.2 基于马尔可夫链的注视转移模式分析
2.2.1 马尔可夫(Markov)链理论
在已知时刻tm系统所处状态的条件下,tm时刻之后系统到达的状态与tm以前系统所处的状态无关,而完全取决于tm时刻系统所处的状态,这种特性称为无后效性,也称为“马尔可夫性”。
①马尔可夫链:时间及状态都是离散的马尔可夫过程;
②连续时间的马尔可夫链:时间连续、状态离散的马尔可夫过程;
③时间、状态都连续的马尔可夫过程。
马尔可夫链在时刻m从任意一个状态i(i∈I)出发,到时刻m+k转移到状态空间I中的某一状态,转移概率pij(m,m+k)称为马尔可夫链的k步转移概率,记为转移概率不依赖于时刻m的马尔可夫链,称为其次马尔可夫链。如果马尔可夫链具有有限状态空间I={1,2,…,N},则k步转移概率矩阵可表示为:
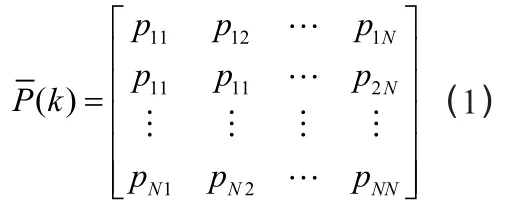
在该矩阵中,所有元素都是非负的,且每一行元素的和均为1。当k=1时,为一步马尔可夫转移概率矩阵;当时k=2,为两步马尔可夫转移概率矩阵,且两步马尔可夫概率转移矩阵等于一步马尔可夫概率矩阵与自身相乘的乘积。
2.2.2 一步注视转移概率矩阵
驾驶人视点驻留的不同兴趣区域可以视为系统的不同状态,同时下一个注视点驻留的区域只与当前区域相关,符合马尔可夫链的典型特性[7]。将划分的驾驶人注视区域看作马尔可夫链的一种状态,基于此状态分别得到驾驶人注视点在各状态间的转移概率。
假定系统处于状态i,aij为系统由状态i转向状态j的频数,n为状态空间,ai为系统由状态i转向其他状态的频数之和,则系统由状态i转向状态j的概率:

基于以上转移概率计算方法,通过对试验录像筛选的驾驶人视点位置在各区域间的一步转移概率矩阵(当驾驶人注视点连续落在某个区域时,并不考虑该区域内的转移问题,即任意区域至其自身的转移概率为0,且矩阵中任意行的转移概率和等于1)。
利用MatLab软件对本次试验驾驶人视点进行一步转移概率统计,首先对经过视频判别的视点转移区域列向量导入MatLab定义为矩阵A,对各区域间转移次数求和后计入矩阵M,得到注视点一步转移总数矩阵(见表2),软件代码如下:
M=zeros(6);%定义一个6行6列的0矩阵
n=size(A,1);%确定A矩阵大小
i=1;i0=1;
for i0=1:(n-1)
M(A(i,1),A(i+1,1))=M(A(i,1),A(i+1,1))+1;%将相应位置计数迭代至矩阵M
i=i+1;
end
进一步按照公式(2)计算得到对注视点的一步转移概率矩阵,本研究统计分为对路段是否存在无关信息域两个方面展开。
各阶段注视点一步转移概率矩阵如表3-表4所示。存在无关信息域路段注视点一步转移概率图如图4所示。
对以上驾驶人注视点一步转移概率矩阵进行分析,由于统计中认为注视点在某一区域内部转移不记录至一步转移次数中,因此每个编号区域转移至其本身的概率为0,而任意行的转移概率和为1。

表2 驾驶人注视点一步转移总数矩阵

表3 存在无关信息域(IIR)驾驶人注视点一步转移概率矩阵

表4 不存在无关信息域(IIR)驾驶人注视点一步转移概率矩阵

图4 注视点一步转移概率示意图
由表可见,驾驶人注视点由区域1转移至区域5的概率为0,即表示驾驶人视点从无关信息域(IIR)位置返回的过程中,视点立即落到车内仪表盘的概率为0,与此同时,区域3和区域5转移至区域1的概率也为0,表示视点从左右两后视镜转移至无关信息域(IIR)的概率为0。则可以推断:驾驶人对无关信息域(IIR)的注视与对左右后视镜和车内仪表盘的注视在绝大多数情况下并不发生在相邻两次注视点区域转移的过程中,即驾驶人往往不会在一定时间段内,注视点始终转移在前方道路视野以外。诚然,注视点保持在前方道路上是驾驶人对行驶前方各道路交通信息有效认知的必要非充分条件,一旦注视点转移出前方道路行驶区域,就存在对道路突发情况认知的延迟,显然驾驶人在潜意识中拒绝这样的情况发生,即驾驶人保持注意力警觉能够通过区域1同区域3和5相互转移概率为0或基本接近于0来表现。反之,如果注视点在区域1与区域3和5的转移发生在相领两次视点转移过程中,对正确认知当前道路交通环境安全是不利的。考虑到驾驶人对左右后视镜和车内仪表盘的关注是对车辆本身和车辆周边情况的正确判断,在绝大多数情况下主导行车安全,由此可推得,区域1即无关信息域(IIR)的存在占用了驾驶人认知道路交通信息的视觉负荷。
对比表3和表4的驾驶人注视点一步转移概率矩阵,表4所示不存在无关信息域路段注视点转移进出编号1类概率为0。在验证无关信息域的存在对驾驶人正确认知当前交通信息没有帮助后,进一步验证不存在无关信息域路段注视点转移方式的不同:以编号2和编号4(即道路路面和车辆)为整体,驾驶人从该类区域由编号3、5转进、转出的概率都有所增加,可以认为驾驶人将存在无关信息域段对无关信息注视的这部分概率转至其他几类有助于认知道路交通信息的区域,可以反映出驾驶人注视点对道路本身集中程度提高了。
3 结语
随着智能网联汽车技术的不断发展,有人—无人混合流驾驶场景对驾驶人各类操控行为提出更高要求。本研究提出路域无关信息域(IIR)的概念,划分驾驶人视点兴趣区域,引入马尔科夫链理论研究注视点转移模型,从动态视觉特征分析无关信息域对驾驶人行为的影响。
分析结果表明,考虑无关信息域的视觉转移模型可以通过量化指标表示,驾驶人对路域无关信息域的注视与对车辆后视镜及车内仪表盘的注视存在视觉转移冲突,即无关信息域造成的驾驶分心。
未来仍有待进一步研究与论证的问题包括:对路域无关信息域就信息内容本身的再细分;考虑驾驶人分类特征(年龄、性别、驾龄等)的再细分;无关信息域与驾驶疲劳、其他驾驶任务负荷的相关性等。
