基于血糖浓度生理调控机制的智能协同控制器设计
2021-05-06刘宝蔡梦迪周培张欣
刘宝 蔡梦迪 周培 张欣


摘 要:现代工业生产中出现越来越多具有大惯性、时变性、时滞性的复杂控制对象,传统控制算法已经不能满足其越来越高的控制要求. 受启发于人体内血糖浓度的生理双向网络调控机制,提出一种智能协同控制器. 该智能协同控制器包括主控制单元、辅控制单元、监控适应单元和协同控制单元四部分. 在监控适应单元的监督控制和协同控制单元的协调控制下,主控制单元和輔控制单元分工协作,共同保证该智能协同控制器在不产生超调的前提下以较快的上升时间和调节时间达到控制系统的目标值. 为检验该智能协同控制器的控制性能,选择工业乙醇生物反应器作为被控对象,对其生物反应温度进行控制仿真. 实验结果表明:相比于普通BP神经网络控制器和模糊控制器,该智能协同控制器具有更好的动态性能、稳态性能及抗干扰能力.
关键词:双向网络调控机制;神经网络;模糊控制;协同控制
中图分类号:TP18 文献标志码:A
Design of Intelligent Coordinated Controller Based on
Physiological Regulation Mechanism of Blood Glucose Concentration
LIU Bao,CAI Mengdi,ZHOU Pei,ZHANG Xin
(College of Control Science and Engineering,China University of Petroleum,Qingdao 266580,China)
Abstract:There are more and more complex control objects with large inertia, time-varying and time-delaying in modern industrial production. The traditional control algorithms fail to meet their higher and higher control requirements. Inspired by the physiological two-way network regulation mechanism of blood glucose concentration in human body, an intelligent coordinated controller is proposed. The intelligent coordinated controller includes four parts: a main control unit(MCU), an auxiliary control unit(ACU), a monitoring adaptation unit(MAU) and a cooperative control unit(CCU). Under the supervisory control of the MAU and the coordinated control of the CCU, the MCU and the ACU work synergistically to ensure that the intelligent coordinated control system reaches the target value of the control system with a relatively smaller rise time and adjustment time on the premise of no overshoot. In order to verify the control performance of the intelligent coordinated controller, an industrial ethanol fermentation bioreactor is selected as the controlled object, and the temperature of the bioreactor is controlled and simulated. The experimental results show that the intelligent coordinated controller has better dynamic performance, steady-state performance and anti-interference ability when compared with the common BP neural network controller and fuzzy controller.
Key words:two-way network regulation mechanism;neural network;fuzzy control;collaborative control
随着工业生产的发展,传统的控制理论和技术已经难以满足其日益复杂的控制要求. 现代工业过程控制中出现的复杂控制对象越来越多,且工艺环境和控制目标的复杂性也日益突出,这对智能控制理论和技术的发展提出更高的要求[1-2]. 常见的智能控制理论与技术主要包括专家控制、模糊控制、神经网络控制、集成智能控制、遗传算法与进化计算等[3-4].
智能控制技术的发展过程中,自然界中各种生物的智能行为,尤其是人类的智能行为或特殊生理调控机制对其发展有重要的启发作用. 如人体内神经系统、内分泌系统、免疫系统和遗传系统等生理调节系统,具有许多特殊的学习或调控机制. 其中,神经内分泌系统作为人体内一个重要的生理调节系统,对各种激素的调控具有自适应性和稳定性等优点. 因此研究基于神经内分泌系统的生物智能控制理论,可为工业生产中复杂控制对象提供新的研究思路,提高其控制质量[5-6].
近些年已经出现一些有关神经内分泌控制的研究成果. 如文献[7]基于神经内分泌系统的睾丸素调控原理,提出一种新颖的双层结构控制器,但该控制器存在对时变控制对象不适用且控制参数不能自适应调整等问题. 文献[8]基于神经内分泌甲状腺激素调节原理,提出一种带长环和超短环结构的智能控制器,并成功应用于机器人系统控制,但该智能控制器在响应速度和控制精度上还存在不足. 文献[9]基于激素调节利用多种反馈保持内分泌系统稳定的原理,提出一种基于神经内分泌算法的智能控制器,并成功应用于永磁同步电机控制系统,但该智能控制器还不具备较好的稳定性和鲁棒性. 上述基于神经内分泌的智能控制在应用上仍具有局限性,且对于工业生产中具有时滞性、大惯性、时变性的复杂控制对象,例如生物酒精发酵生物反应器的温度控制,上述智能控制器仍不能实现较好的自适应控制和稳定控制.
针对上述问题,本文受启发于神经内分泌系统双向网络调控机制及胰岛素脉冲分泌模式,提出一种基于人体内血糖浓度生理调控机制的智能协同控制器. 该智能协同控制器具备较好的自适应性和稳定性,能够提高对具有时滞性、大惯性、时变性等复杂控制对象调控的动态性能及稳态性能指标.
1 人体内血糖浓度双向网络调控机制原理
1.1 人体内双向网络调控机制
双向网络调控机制对于维持人体内许多生理指标的稳定或平衡非常重要. 双向调控网络包括两个子网络:交感神经网络(sympathetic nerve network,SNN)和副交感神经网络(parasympathetic nerve network,PNN). 对于同一生理指标,交感神经网络和副交感神经网络都是通过分泌大量的激素分别实现增强和抑制调节作用,从而将体内的生理指标稳定在正常的范围内. SNN的调节作用可以增强免疫力,加速机体的新陈代谢,PNN的调节作用可减弱或减慢机体的活动能力. 例如当体内的某一生理指标值高于其正常水平时,SNN的调节作用首先比PNN的调节作用强得多,从而令生理指标值迅速降低;当指标值接近正常水平时,两者的调节作用变得相等. 在复杂生理调控网络的双向调节作用下,生物体内的一些生理指标可以快速变得稳定,并且具有较强的稳定性和鲁棒性[10].
1.2 血糖浓度的调节过程
人体内的血糖浓度就是通过上述双向网络调控机制维持稳态的. 血糖浓度在双向网络调控机制作用下维持稳定的具体调节过程如下:当人体内的血糖浓度低于正常值时,血糖浓度传感因子将血糖浓度信号传输至大脑皮质等神经中枢系统调理后,再传递给下丘脑血糖调节中枢,使SNN的作用强于PNN,这将导致胰腺中胰岛素的分泌减少并使胰高血糖素的分泌增加,从而可以抑制血糖的分解且促进肝脏中的肝糖原分解成血糖,最终使血糖浓度迅速上升. 相反,当人体内的血糖浓度高于正常值时,PNN的作用将强于SNN,这会增加胰岛素的分泌,减少胰高血糖素的分泌,从而促进血糖的分解且抑制肝糖原分解成血糖,最终导致血糖浓度迅速下降. 当PNN和SNN的作用均衡时,胰岛素和胰高血糖素的分泌大体相同,从而维持人体内血糖浓度的稳定[11].
当人们进食后,食物中的糖类被转化为葡萄糖,使得血糖浓度会在三餐后急剧上升. 同时胰岛素含量会比较灵敏地响应血糖浓度的变化,呈脉冲状分泌来降低血糖浓度,以维持血糖浓度的稳定. 同样当血糖浓度低于正常水平时,胰高血糖素也会呈脉冲状分泌来提高血糖浓度,恢复到正常水平. 胰岛素呈脉冲样的分泌模式对其发挥正常的降糖作用意义重大. 医学上为了对比脉冲式和持续恒速两种胰岛素分泌方式的降糖效果,将等量的胰岛素分别以上面两种方式注射,结果表明达到相同血糖水平和相同血糖清除率,脉冲样分泌模式的降糖效率比持续恒速分泌模式高30%[12].
血糖浓度维持稳定的调节过程存在三个特性. 第一个是双向网络调控机制,即当血糖的浓度高于或低于正常值时,交感神经网络和副交感神经网络两个子网络协同工作,共同调控使其恢复到正常水平. 第二个是快速脉冲调控机制,即当血糖的浓度高于或低于正常值时,胰腺分泌的胰岛素会作为一个巨大的脉冲,迅速地增加或减少,使得血糖的浓度迅速接近正常值. 第三个是生理预得胰岛素稳态分泌率的特性,即在正常的血糖浓度水平时,胰腺的胰岛素分泌速率存在稳定的恒定值. 基于以上三个调节特性,血糖浓度可以迅速恢复到生理稳态值.
2 基于血糖浓度双向网络调控机制的智能协
同控制器设计
在复杂非线性对象控制过程中,为实现工艺变量在较小或无超调的前提下,以较快速度接近设定值,本文设计了一种基于血糖浓度生理调控机制的智能协同控制器.
2.1 智能协同控制器的结构设计
受启发于人体内血糖调节过程中的双向网络调控机制、胰岛素脉冲式分泌模式以及生理上预先获得胰岛素分泌速率三个特性,本文设计的智能协同控制器系统结构如图1所示. 图中控制系统的设定值sp(t)对应于人体内正常的血糖浓度,被控对象输出值pv(t)对应着人体内实际的血糖浓度,控制器输出值u(t)对应于胰腺分泌的胰岛素水平.
对应于人体内的交感神經网络、副交感神经网络、大脑皮质神经中枢和下丘脑血糖调节中枢,依次分别设计智能协同控制器的主控制单元、辅控制单元、协同控制单元和监控适应单元,具体对应关系如表1所示.
1)当控制系统的设定值sp(t)发生改变或出现外部干扰导致系统产生较大偏差e(t)时,主控制单元输出脉冲式的控制信号u1(t),改善控制系统动态变化过程中的上升时间和超调量等指标.
2)当控制系统达到相对稳定状态时,辅控制单元输出控制信号u2(t),使其快速接近稳态值us(t)并进行微调,改善其工艺变量稳态变化过程中的调节时间和控制精度.
3)协同控制单元在整个控制过程中协同调控
主、辅控制单元的工作过程,并融合产生最终的控制输出信号.
4)监控适应单元负责实时监测控制系统运行状态,提供控制系统的实时期望响应轨迹并提高智能协同控制器的适应性.
2.2 主控制單元的设计
当控制系统出现偏差时,为实现工艺变量在较小或无超调的前提下快速接近设定值,受启发于SNN在双向调控网络中的作用和结构特点设计了主控制单元,基于血糖浓度调节过程中胰岛素脉冲分泌模式高效调节血糖的特性,设计了主控制单元的快速脉冲式控制规律.
主控制单元的快速脉冲式控制规律为:当控制系统出现较大偏差时,主控制单元输出一个脉冲状控制信号,其峰值为最强控制信号,使工艺变量迅速地接近设定值;同时为避免出现超调,控制信号要及时从峰值恢复到稳态值.
整个脉冲式控制规律利用BP神经网络算法实现. BP神经网络结构设计为三层,分别为输入层、隐含层、输出层. 一般输入层选取3个神经元,且3个神经元在不同控制阶段输入信息不同,隐含层常选取5~7个神经元,输出层神经元为主控制单元控制信号u1(t).
主控制单元在输出脉冲式控制信号时,为实现脉冲信号的上升沿,期望神经网络输出控制系统所需的最强控制信号um(t). 此时神经网络输入层3个神经元的输入信息分别为:最强控制信号um(t)、主控制单元控制信号u1(t-ts)和误差error1(t),其中error1(t) = um(t)-u1(t-ts),ts表示采样周期. 为避免主控制单元控制信号在脉冲峰值维持时间过长导致控制系统出现超调或者剧烈震荡,当系统响应曲线与2.4节监控适应单元期望响应曲线之间的误差绝对值小于误差阈值ε1时,则使主控制单元输出脉冲的下降沿,期望神经网络输出未来控制系统稳态对应的控制信号值us(t). 此时神经网络输入层三个神经元输入信息分别为:未来控制信号稳态值us(t)、主控制单元控制信号u1(t - ts)和误差error1(t),其中error1(t) = us(t)-u1(t - ts). 此过程中,神经网络通过BP算法,对网络的权值和误差进行反复修正,使输出值尽可能的接近期望值[13-14].
为实现神经网络学习过程中学习率的自适应性,提高神经网络对非线性对象的控制精度,采用基于神经网络误差变化量error1(t)的学习率自动调节公式,如式(1)所示,
δ(t)=λ1 δ(t-ts),当error1(t)>0时λ2 δ(t-ts),当error1(t)<0时δ(t),其他情况时 (1)
式中:δ(t)表示第t次迭代的学习率,且Δerror1(t)=
error1(t)-error1(t-ts). Δerror1(t)>0时,表明第t-ts次迭代无效,则需乘以减量系数λ1,以减小学习步长,从而避免无效的迭代,提高学习效率;当Δerror1(t)<0时,表明第t-ts次迭代有效,则乘以增量系数λ2,以增大学习步长,加快网络学习速度[15]. 本文借鉴人体内激素的Hill函数分泌调节规律,设计减量系数λ1和增量系数λ2变化规律,具体如式(2)所示.
λ1(G) = (2)
式中:G是函数自变量;T为阈值,且T > 0;n为Hill系数,且n≥1;λ1的取值满足0.5≤λ1(G)≤1. λ2的值应大于1,设置为2λ1. 显然,式(2)变化规律具有单调性和非负性.
为实现主控制单元快速脉冲式控制规律,被控对象的控制信号稳态值us(t)是智能协同控制器的一个重要参数,且影响到控制系统的控制性能. 受启发于胰岛素分泌速率可以预得的特性,为预先获得被控对象的控制信号稳态值us(t),可以利用传统控制方式在n个不同工作点附近进行阶跃响应测试,从而得到被控对象设定值sp(t)和控制信号稳态值us(t) 的n组数据对{(sp1,us1),(sp1,us1),…,(spn,usn)}. 进一步利用数据拟合工具得到两者之间近似的非线性关系式,可由式(3)表达:
us(t) = F(sp(t)) (3)
式中:F(·)代表控制信号稳态值us(t)和设定值sp(t)的对应非线性关系. 这样在控制系统给定不同设定值 sp(t)时,就可以近似获得不同设定值所对应的控制信号稳态值us(t).
2.3 辅控制单元的设计
主控制单元主要作用是满足控制系统的动态性能指标,以进一步提高稳态过程中的控制精度等. 受启发于PNN在双向调控网络中的结构特点及其与SNN的协同作用,设计了辅控制单元控制规律.
辅控制单元控制规律同样利用BP神经网络算法实现. 当控制系统进入相对稳定的状态时,主控制单元输出的控制信号稳态值不能实现较高的控制精度. 而BP神经网络可以通过较强的学习能力将控制误差降到较小的范围内,因此能够满足控制器较高的控制精度. 神经网络的结构为三层,分别为输入层、隐含层、输出层. 输入层一般选取3个神经元,且3个神经元的输入信息分别为error2(t)、error2(t) -error2(t - ts)和error2(t) + error2(t - ts),其中error2(t)表示神经网络的学习误差,并且学习误差在不同控制阶段具有不同的定义. 隐含层常选取5~7个神经元,输出层神经元为辅控制单元控制信号u2(t).
辅控制单元的控制规律为:在控制系统的设定值发生改变后,为跟踪控制系统设定值变化,神经网络的学习误差error2(t)表达如式(4)所示:
error2(t) = η·(sp(t) - pv(t - ts)) (4)
式中:当控制系统被控对象为正作用特性时η = 1,反之,η = -1.
当系统响应曲线与2.4节监控适应单元期望响应曲线之间的绝对误差小于误差阈值ε1时,为避免出现超调或震荡,同时有利于辅控制单元对主控制单元起协调作用,期望辅控制单元输出未来控制信号稳态值us(t). 此时神经网络学习误差error2(t)则为控制信号稳态值us(t)与辅控制单元输出的控制信号u2(t)之间的差值,如式(5)所示:
error2(t) = us(t) - u2(t) (5)
当系统响应曲线与监控适应单元期望响应曲线之间的绝对误差小于误差阈值ε2时,为保证控制精度,神经网络error2(t)重新设置为公式(4)所示的定义方式. 一般情况下ε2 < ε1. 神经网络通过BP算法对网络权值和误差不断进行修正,同样利用式(1)所示的学习率自动调节方法来提高学习率的适应性,获得神经网络的输出u2(t),也是辅控制单元要输出的控制信号.
2.4 监控适应单元的设计
为了监控主、辅控制单元的工作状态并满足在不同工作点的控制性能指标,实现控制系统的响应输出具有较小的上升时间且避免超调,对应下丘脑血糖调节中枢对血糖浓度的监测与调控作用,设计了监控适应单元控制规律.
监控适应单元提供系统的期望响应曲线,利用期望响应曲线与控制系统响应曲线之间的实时误差,进一步确定主、辅控制单元的控制信号输出达到控制信号稳态值us(t)的时间,从而保证主、辅控制单元实现各自的控制性能指标.
本文主要针对化工过程大多数开环稳定工程对象,且可以用一阶纯滞后环节近似. 对于开环不稳定对象,需要施加单独闭环控制先实现稳定之后再应用本文控制算法. 因此,选用时间常数比较小的一阶惯性环节内部模型作为性能目标,可以实现对大多数化工过程对象的高质量控制需求. 通常一阶惯性模型的响应速度较快且无超调,将一阶惯性作为监控适应单元的目标模型,由其得到响应曲线作为控制系统的期望响应曲线. 目标模型传递函数表达式如式(6)所示:
G′(s) = (6)
式(6)中时间常数T ′ 影响期望响应曲线的响应速度和上升时间,从而决定了主、辅控制单元输出的控制信号变为控制信号稳态值us(t)的时间,因此时间常数T ′ 的设置对控制系统的控制精度非常重要. 由于非线性控制对象在最强控制信号作用下的响应速度是最快的,为了使目标模型获得较小的上升时间,因此依据被控对象在最强控制作用下响应曲线的时间常数t ′ 来确定目标模型的时间常数T ′ .
上述涉及控制系统中最强控制信号的确定方法为:若控制对象为正作用特性,设控制系统设定值从 sp1变为sp2,且sp1 < sp2,被控对象的最强控制信号um(t)即为最大控制信号umax(t);反之,若sp1 > sp2时,最强控制信号um(t)即为最小控制信号umin(t). 如式(7)所示:
um(t) = umax(t),当sp1 < sp2时umin(t),当sp1 > sp2时 (7)
若控制对象为反作用特性,则其最强控制信号um(t)的选择方式正好与公式(7)相反.
那么,以正作用特性被控对象为例,当其设定值由sp1变为sp2,且sp1 < sp2时,该被控对象在最强控制信号作用下,响应曲线的时间常数t′确定方法如下:若设定值初值sp1对应的稳态控制信号为初始控制信号u0(t),最强控制信号即为最大控制信号umax(t),两者之间的差值为um(t),如式(8)所示:
um(t) = umax(t) - u0(t) (8)
um(t)经拉普拉斯变换为um(s). 由于工业生产中大多数的工艺过程在工作点附近可以利用一阶纯滞后模型来近似表示,其传递函数如式(9)所示:
G(s) = (9)
式中:K(t)为开环增益,T(t)为时间常数,τ(t)为纯滞后时间. 在阶跃信号Um(s)作用下,此时控制系统被控对象的输出值增量C(s)为:
C(s) = G(s)·Um(s) (10)
將被控对象的输出值增量C(s)经拉普拉斯反变换得Δc(t),且被控对象设定值初值sp1与终值sp2之间的差值为sp,如式(11)所示:
sp = sp2 - sp1 (11)
一般认为,近似的一阶被控对象在阶跃信号作用下,从初始状态达到设定值初值与终值之间变化量的63.2%所需的时间接近对象时间常数. 因此为获得在最强控制信号下的时间常数t′,令
c(t′) = 0.632·sp (12)
由等式(12)得到的t′即为设定值为sp2时,被控对象在最强控制信号下的大致时间常数. 此时被控对象的上升时间是最短的.
考虑到实际应用中,目标模型的时间常数T′取值应略大于t′,可设置为kt′,其中k>1. 由此,即可获得设定值改变为sp2时的目标模型,由其得到控制系统被控对象所需的期望响应曲线. 当工业生产中的工艺过程工作点附近利用二阶纯滞后模型来近似表示时,监控适应单元目标模型的时间常数T′与一阶纯滞后模型得到的时间常数T′近似相等. 因此,多数情况下两者之间的期望响应曲线差异较小,获得的控制效果差异较小.
2.5 协同控制单元的设计
主控制单元和辅控制单元的控制优势体现在不同的控制阶段,为实现主、辅控制单元在整个控制过程中的相互配合,受启发于大脑皮质等高级神经中枢对双向调控网络的协同作用,设计了协同控制单元来协同组织主、辅两个控制单元.
协同控制单元利用模糊控制算法实现. 根据控制系统的偏差和偏差变化量,得到主控制单元的控制系数k1. 主控制单元的控制系数k1 > 0,辅控制单元的控制系数k2 > 0,且k1 + k2 = 1. 那么,智能协同控制器输出的控制信号u(t)则表示为:
u(t) = k1 u1(t) + k2 u2(t) (13)
如式(13)所示,智能协同控制器的控制信号u(t)为主、辅控制单元输出的控制信号分别乘以各自控制系数后的总和. 因此,控制系数k1、k2决定了控制器在不同的控制阶段,是否由主控制单元或辅控制单元发挥主要作用. 即当控制系统的偏差或偏差变化较大时,协同控制单元会使主控制单元系数 k1输出较大值,使主控制单元发挥主要作用;而当控制系统的偏差较小时,协同控制单元会使主控制单元系数k1输出较小值,使辅控制单元发挥主要作用.
实现协同控制单元算法的基本步骤如下:
1)参数定义. 确定输入变量、输出变量及量化因子、比例因子. 将控制系统控制偏差e(t)和偏差变化率ec(t)作为协同控制单元的输入变量,主控制单元的控制系数k1作为输出变量. 确定输入、输出变量的基本论域及模糊偏差量E、偏差变化率量EC、控制系数变量k1模糊论域. 进一步根据基本论域和模糊论域确定偏差的量化因子ke、偏差变化率的量化因子 kec及控制系数的比例因子K k1.
2)模糊化. 确定各个输入变量和输出变量的模糊语言值及隶属度函数[16]. 输入变量E、EC的模糊语言值分别选取7个:负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB);输出变量的模糊语言值选取5个:负大(NB)、负小(NS)、零(ZO)、正小(PS)、正大(PB). 根据相应隶属度函数获得相应模糊子集的隶属度,实现了精确量转化为模糊语言值[17].
3)建立模糊规则. 根据控制经验,输出变量k1在不同e(t)和ec(t)下自调整需要满足以下49条调整规则,具体的模糊控制规则如表2所示.
4)去模糊化. 本文选择最大隶属度法[18],结合比例因子将控制系数k1模糊值转化为精确值,进而得到控制系数k2,最终获得智能协同控制器的实时控制信号u(t).
2.6 智能协同控制器的整体工作过程
智能协同控制器利用协同控制单元对主控制单元与辅控制单元的输出信号进行协同组织时,同时利用监控适应单元对控制系统的响应曲线进行实时跟踪监督,从而可以实现主、辅控制单元的光滑切换,保证控制器的正常工作并实现各项控制指标控制要求. 控制器的控制流程如图2所示.
1)当控制器的设定值发生改变时,经协同控制单元的判断和协调,控制器的主控制单元进入工作状态,输出脉冲式的控制信号.
2)当控制系统的绝对误差小于阈值ε1时,经协同控制单元的判断和协调,辅控制单元进入工作状态,输出控制器的控制信号.
3)主、辅控制单元整个工作过程都由监控适应单元监控和协同控制单元协同,以保证主控制单元实现较高的动态性能指标及辅控制单元实现较高的稳态性能指标.
3 系统仿真及结果分析
3.1 仿真被控对象
为了测试该智能协同控制器具有良好的控制效果,选择用于实现生物酒精发酵过程的生物反应器作为被控对象. 该生物反应器是一个增益和时间常数具有强时变性和强非线性的化学反应过程,传统的控制算法一般难以取得理想的控制效果. 反应装置如图3所示,Cs是葡萄糖浓度;Cp是乙醇浓度;O2是氧气;C O2是液态氧的溶解浓度;C*O2是液态氧的平衡浓度;Tc是温度控制器;Tin是进料温度;Tr为反应器温度;Te是出料温度;Tog是夹层里冷却剂的温度;Fi是进料流量;Fe为出料流量;Fog是冷却剂流量. 该生物反应器的各模型参数值和机理模型可参见文献[19].
智能协同控制器的监控适应单元需要确定被控对象的传递函数表达式,因此利用多个温度工作点阶跃响应辨识方法建立一阶滞后传递函数模型,通过Matlab的拟合工具得到该生物反应器温度的模型如式(14)所示:
G(s) = K(t)=-9.744Tr(t)0.960 9+180.8T(t)=86.39Tr(t)0.280 9-192.3τ(t)=0.014 4Tr(t)2-0.925 9Tr(t)+12.45 (14)
3.2 仿真結果分析
仿真实验过程中将控制系统设定值先由32 ℃变化到35 ℃,再变化到28 ℃,最后为24 ℃. 针对生物反应器非线性温度被控对象,分别用本文设计的智能协同控制器、常规BP神经网络控制器、常规模糊控制器和文献[10]中的非线性导向智能控制器进行控制,对比4种控制器的控制效果. 各控制器的参数设置如下:
1)常规BP神经网络控制器:BP神经网络结构为三层. 输入层选取3个神经元,分别为控制系统工艺变量设定值、测量值和两者间误差. 隐含层选取7个神经元,输出层神经元为控制系统的控制信号. 隐含层和输出层的激励函数选用tanh函数,学习速率为0.3.
2)常规模糊控制器:输入变量为误差e(t)、误差变化率ec(t)及输出变量为控制信号u,量化因子K e和K ec分别为1/12和1/2,比例因子 为1/3. 输入变量E、EC和输出变量U的模糊语言值分别选取7个:负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB);E、EC和U的“NB”都选择Z型隶属度函数,“PB”都选择S型隶属度函数,其余语言变量都选择三角形隶属度函数.
3)非线性导向智能控制器:该控制器的设计也是受启发于双向网络调控机制和人体葡萄糖调节特性,主要包括协同控制单元、增强控制单元、抑制控制单元和辅控制单元,各单元参数的具体设置方式可参见文献[10].
4)智能协同控制器:主、辅控制单元神经网络隐含层激励函数都为sigmoid函数,输出层激励函数都为tanh函数,学习率分别设置为0.3和0.2. 误差阈值ε1为1.8,ε2为0.2. 监控适应单元基于一阶滞后和二阶滞后生物反应器模型获得的目标模型时间常数近似相等,具体设置如表3所示. 生物反应器温度设定值范围为21 ℃ ~ 36 ℃,因此设协同控制单元的输入变量偏差e(t)的基本论域为[-36,36]及模糊论域为[-6,-4,-2,0,2,4,6],则偏差的量化因子为1/6. 输入变量偏差变化率ec的基本论域为[-6,6]及模糊论域为[-6,-4,-2,0,2,4,6],则偏差变化率的量化因子为1. 输出变量控制系数k1的基本论域为[0,1]及模糊论域为[-2,-1,0,1,2],则输出变量的比例因子为1/4. 模糊变量E、EC和K1的“NB”都选择Z型隶属度函数,“PB”都选择S型隶属度函数,其余语言变量都选择三角形隶属度函数.
控制仿真实验包括无干扰和存在噪声干扰两部分.
1)无干扰控制实验
智能协同控制器及其主、辅控制单元各自的控制信号输出如图4所示,4种控制器的控制器输出及控制效果如图5、图6所示. 4种控制器的上升时间tr对比如表4所示,调节时间ts对比如表5所示,超调量对比如表6所示,稳态误差对比如表7所示.
从表4~表7中的数据可以看出,相比于常规的BP神经网络控制器,智能协同控制器和其他两种控制器的上升时间和调节时间较短,超调量较小;并且常规的模糊控制器存在一定的稳态误差,智能协同控制器和其他两种控制器的稳态误差较小.
由图4中智能协同控制器的控制信号输出和图6中智能协同控制器的控制效果可以看出,该温度对象特性为反作用特性,当控制系统的设定值变大时,该智能协同控制器在短时间内输出幅值为范围下限的脉冲式控制信号;当设定值变小时,智能协同控制器在短时间内输出幅值接近范围上限的脉冲式控制信号. 即当控制系统的设定值发生改变时,主控制单元输出脉冲式的控制信号,由协同控制单元的判断,使主控制单元起主要作用,以减小上升时间,保證控制系统较好的动态性能. 经与监控适应单元的期望响应曲线对比,当控制系统的响应曲线接近稳态时,由协同控制单元判断,决定智能协同控制器的控制输出以辅控制单元的输出信号为主,减小控制系统的稳态误差并维持稳态. 该效果图说明了该智能协同控制器的可行性和良好性能.
由对比图5中4种控制器的控制信号输出及图6中4种控制器的控制效果可以看出:对于同一被控对象生物反应器温度,智能协同控制器在上升时间tr、超调量、调节时间ts等动态性能指标的表现上,要明显优于常规的BP神经网络控制器. 同时在稳态性能上智能协同控制器避免了模糊控制器稳态精度不高的问题,取得较好的稳态性能. 在综合性能上,智能协同控制器也要优于非线性导向智能控制器. 因此本文提出的智能协同控制器在不同工况下,能够无超调且更加迅速地逼近生物反应器的目标温度值,控制性能要优于其他3种对比控制器.
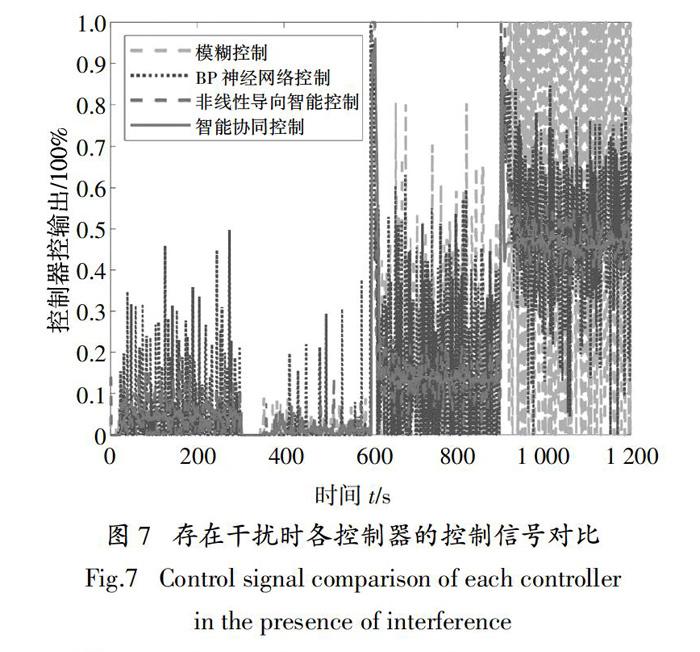
2)有干扰控制实验
为检验智能协同控制器的抗干扰控制能力,分别在4种控制器的被控变量输出上叠加均值为0、方差为0.15的白噪声,各控制器参数值保持不变. 图7和图8分别为加入白噪声后4种控制器的控制信号输出对比图和被控变量变化对比图.
从图7中可以明显看出,存在干扰时,常规的BP神经网络控制器和模糊控制器输出的控制信号振荡幅度比较大,非线性导向智能控制器输出的控制信号震荡幅度较小,而智能协同控制器输出控制信号的波动最小.
从图8中可以看出,对于叠加噪声后的控制系统,智能协同控制器的控制效果要优于常规的BP神经网络控制器、模糊控制器和非线性导向智能控制器. 采用均方误差来评价各控制器的抗干扰能力,智能协同控制器的均方误差为0.167 9,非线性导向智能控制器的均方误差为0.184 3,BP神经网络控制器的均方误差为0.210 1,模糊控制器的均方误差为0.487 1. 因此,相对于3种对比控制器,本文设计的智能协同控制器具有更好的抗干扰能力.
4 结 论
1)本文在研究基于神经内分泌系统的智能控制器的基础上,受启发于神经内分泌系统在双向网络调控机制下维持血糖平衡的原理,提出一种基于血糖浓度调控机制的智能协同控制器.
2)该智能协同控制器借鉴双向网络调控机制思想和胰岛素脉冲式分泌模式的特性,可以在不产生超调的前提下以较小的上升时间接近控制系统目标值,且达到稳态误差较小. 该控制器能够提高复杂被控对象的控制质量.
3)将该控制器应用于生物反应器的温度控制
中,实验表明本文所提出的基于生物调控机制的智能协同控制器不仅提高了控制系统的动态性能和稳态性能,而且提高了控制系统的抗干扰能力.
4)将来需要进一步研究神经内分泌系统复杂的信息处理与调控机制,并积极将神经内分泌系统内某些生物网络机理与智能控制网络相结合,以便设计出具备更优性能的智能控制器.
参考文献
[1] 刘宝. 基于生物网络的智能控制系统及其应用[D]. 上海:东华大学,2006.
LIU B. Bio-network-based intelligent control systems and their applications [D]. Shanghai:Donghua University,2006. (In Chinese)
[2] 孙增圻,邓志东,张再兴. 智能控制理论与技术[M]. 北京:清华大学出版社,2011.
SUN Z Q,DENG Z D,ZHANG Z X. Theory and technology of intelligent control[M]. Beijing:Tsinghua University Press,2011. (In Chinese)
[3] 辛斌,陈杰,彭志红. 智能优化控制:概述与展望[J]. 自动化学报,2013,39(11):1831—1848.
XIN B,CHEN J,PENG Z H. Intelligent optimized control:overview and prospect [J]. Acta Automatica Sinca,2013,39(11):1831—1848. (In Chinese)
[4] ZHU C H,LI P J,WANG J P,et al. Research on intelligent controller of wind-power yaw based on modulation of artificial neuro-endocrine-immunity system[J]. Procedia Engineering (S1877-7058),2011,15:903—907.
[5] 丁永生. 基于生物网络的智能控制与优化研究进展[J]. 控制工程,2010,17(4):416—421.
DING Y S. Research development of bio-network based intelligent control and optimization [J]. Control Engineering of China,2010,17(4):416—421. (In Chinese)
[6] 金耀,夏毅敏,康辉梅,等. 一种内分泌单神经元控制策略及应用[J]. 系统仿真学报,2014,26(5):1108—1112.
JIN Y,XIA Y M,KANG H M,et al. Endocrine single neuron control strategy and its applications [J]. Journal of System Simulation,2014,26(5):1108—1112. (In Chinese)
[7] CHEN D B,ZOU F J,WANG J T. A multi-objective endocrine PSO algorithm and application [J]. Applied Soft Computing(S1568-4946),2011,11(8):4508—4520.
[8] 郭崇濱,郝矿荣,丁永生. 基于神经内分泌的并联机器人智能控制系统[J]. 机电工程,2010,27(7):1—4.
GUO C B,HAO K R,DING Y S. Parallel robort intelligent control system based on neuroendocrine method [J]. Journal of Mechanical & Electrical Engineering,2010,27(7):1—4. (In Chinese)
[9] 舒双宝,王晓旭,夏豪杰,等. 基于神经内分泌算法的智能控制器设计[J]. 电子测量与仪器学报,2018,32(7):192—197.
SHU S B,WANG X X,XIA H J,et al. Intelligent controller design based on neuroendocrine algorithm [J]. Journal of Electronic Measurement and Instrumentation,2018,32(7):192—197. (In Chinese)
[10] LIU B,DING Y S,WANG J H. A bio-system inspired nonline intelligent controller with application to bio-reactor system [J]. Neurocomputing,2015,168(C):1065—1075.
[11] 王立铭. 糖尿病的过去、现在与未来(九):胰岛素进化论[EB/OL]. (2016-07-25) [2018-05-04]. https://xueqiu.com/3993902801/79119489.
WANG L M. The past、present and future of diabetes (9):The theory of insulin evolution[EB/OL]. (2016-07-25) [2018-05-04]. https://xueqiu.com/3993902801/79119489. (In Chinese)
[12] 于浩泳,吴海娅,贾伟平. 胰岛素脉冲样分泌的机制及临床意义[J]. 中华内分泌代谢杂志,2005,21(3):285—287.
YU H Y,WU H Y,JIA W P. Pulsatile insulin secretion mechanism and clinic significance [J]. Chinese Journal of Endocrinology and Metabolism,2005,21(3):285—287. (In Chinese)
[13] YAO Z T,PAN H X. Engine fault diagnosis based on improved BP neural network with conjugate gradient[J]. Applied Mechanics & Materials,2014,536/537:296—299.
[14] 王镇道,郭敬勋,肖旺. 基于自适应径向基函数神经网络的光伏MPPT研究[J].湖南大学学报(自然科学版),2019,46(10):96—100.
WANG Z D,GUO J X,XIAO W. Photovoltaic system MPPT algorithm based on adaptive radial basis function neural network[J]. Journal of Hunan University (Natural Sciences),2019,46(10):96—100. (In Chinese)
[15] 付光杰,胡明哲. 基于改进型学习率自适应BP神经网络的风力发电变桨距控制技术[J]. 自动化与仪器仪表,2016(6):8—10.
FU G J,HU M Z. Variable pitch control technology for wind power generation based on improved learning rate adaptive BP neural network [J]. Automation & Instrumentation,2016(6):8—10. (In Chinese)
[16] CHOI H H,YUN H M,KIM Y. Implementation of evolutionary fuzzy PID speed controller for PM synchronous motor[J]. IEEE Transactions on Industrial Informatics,2015,11(2):540—547.
[17] 刘华,刘敏层. 基于模糊PID在锅炉温度控制系统的仿真研究[J]. 自动化与仪表,2018,33(4):20—25.
LIU H,LIU M C. Simulation research of boiler temperature control system based on fuzzy PID [J]. Automation & Instrumentation,2018,33(4):20—25. (In Chinese)
[18] 楊小龙,徐鑫阳,马自会. 基于改进模糊PID算法的空燃比控制策略研究[J]. 湖南大学学报(自然科学版),2015,42(4):34—39.
YANG X L,XU X Y,MA Z H. Research on single cylinder engine A/F control based on a modified fuzzy PID strategy[J]. Journal of Hunan University (Natural Sciences),2015,42(4):34—39. (In Chinese)
[19] NAGY Z K. Model based control of a yeast fermentation bioreactor using optimally designed artificial neural networks[J]. Chemical Engineering Journal,2007,127(1):95—109.
收稿日期:2020-01-06
基金项目:国家自然科学基金重点资助项目(60534020,60775052),National Natural Science Foundation of China(60534020,60775052);中央高校基本科研业务费专项资金资助项目(20CX05006A),The Fundamental Research Funds for the Central Universities(20CX05006A);中石油重大科技项目(ZD2019-183-007),The Major Scientific and Technological Projects of CNPC(ZD2019-183-007)
作者简介:刘宝(1971—),男,山东淄博人,中国石油大学教授
通信联系人,E-mail:liubao@upc.edu.cn
