基于序列图像的土壤表面三维重建及粗糙度测量
2021-05-06缪盾王铭浩徐明玉
缪盾 王铭浩 徐明玉
摘要:土壤的表面粗糙度是精准农业所需的重要信息,通过序列图像重建地表三维模型来自动测量任意位置和区域的土壤粗糙度。对试验田土壤进行序列图像采集,由Agisoft PhotoScan软件对图像进行处理并得到三维点云数据。在Matlab平臺对点云进行表面拟合和全域粗糙度求解。结果表明,该方法在任意选取的4个方向的二维粗糙度测量值与传统方法测量值的相对误差在6%以下。因此,基于序列图像的土壤表面三维重建及粗糙度测量是一种可行、快速、自动化程度高而成本低的粗糙度测量方法。
关键词:序列图像;土壤表面;三维重建;粗糙度;地表三维模型
土壤的表面粗糙度是表征土壤水温特性和影响土壤性质的一个重要参数,是实现精准农业所需的重要信息[1]。地表的粗糙度和地表径流有重要关系,精细平整的土地能节约灌溉用水,提高肥料利用率,抑制杂草生产,便于进行科学的水肥管理[2]。常用的地表粗糙度测量方式主要有5种:红外结构光检测法、激光测距仪法、立体摄影检测法、探针法、链条法[3]。其中,前3种是非接触测量法,需要人机配合,后期数据处理复杂;后2种是传统的接触测量法,以人工测量为主,简单易行,但检测效率低,同时会破坏土壤表面,只能检测局部或线性的粗糙度,不能快速检测全局的粗糙度。
1 土壤表面三维重建
数字图像是真实世界的另一种表现手法,通过图像能够得到丰富的信息。随着无人机平台的快速发展和广泛应用,采集数字图像已经完全能够实现自动化。采集具有一定重叠度的序列图像,通过构建二维图像逆推至原来三维信息的数学模型,从而进行基于图像的三维重建,如图1所示。
1.1 数学模型构建
目标物体表面某点的三维几何位置与其在图像中对应点之间的关系由成像的数学模型决定,数学模型即为世界坐标系、相机坐标系、图像坐标系和像素坐标系之间的转换关系[4-5]。如图2所示,世界坐标系到相机坐标系经过了旋转和平移,形成的虚像落于图像坐标系中,而相片采用的是像素坐标系,由图像坐标系转换到像素坐标系须经过焦距和像素原点的定位。因此世界坐标系下的任一点成像后在相片的坐标可由公式(1)计算得到。
从公式(1)中可见,从图像逆向求解点的三维位置时,是缺少深度信息的,这是由于单个普通相机图像是不具有深度信息的,而通过2张具有50%以上重叠度的相片,根据对极几何约束方程,恢复出点的深度信息。对相邻的2张具有重叠度的相片进行特征点匹配,通过匹配的同名点计算出包含深度信息的基本矩阵[6],计算公式如下:其中:F为基本矩阵;R为旋转矩阵;Tx、Ty、Tz分别为x、y、z轴向平移量;Mr为右相片同名点的齐次坐标;Ml为左相片同名点的齐次坐标;pr为右片同名像点像素坐标;pl为左片同名像点像素坐标。以此方法能解算序列图像中每2张相邻相片的转换参数,恢复重叠区域的三维位置。
1.2 Agisoft PhotoScan三维点云重建
Agisoft PhotoScan软件是一款基于图像的多视点三维重建软件,能够快速通过图像生成目标区域的三维点云。通过“对齐照片”命令提取并匹配图像的特征点,自动求解转换参数,进行重叠区域的三维重建,通过内插法进行稠密点云重建。然而在图像采集过程中不可避免会受到空气或土壤表面悬浮微尘或杂物的影响,在点云重建后产生噪声点[7],影响后续粗糙度量测。考虑到土壤与噪声的色值差异较大,在软件中设定灰度阈值进行点云过滤。本次测量目标区域为20 m×20 m的试验田,图3为大疆精灵无人机采集的一组图像在软件中的重建点云效果。继而将生成的点云数据导出为三维坐标格式(txt)。
2 粗糙度量测及精度分析
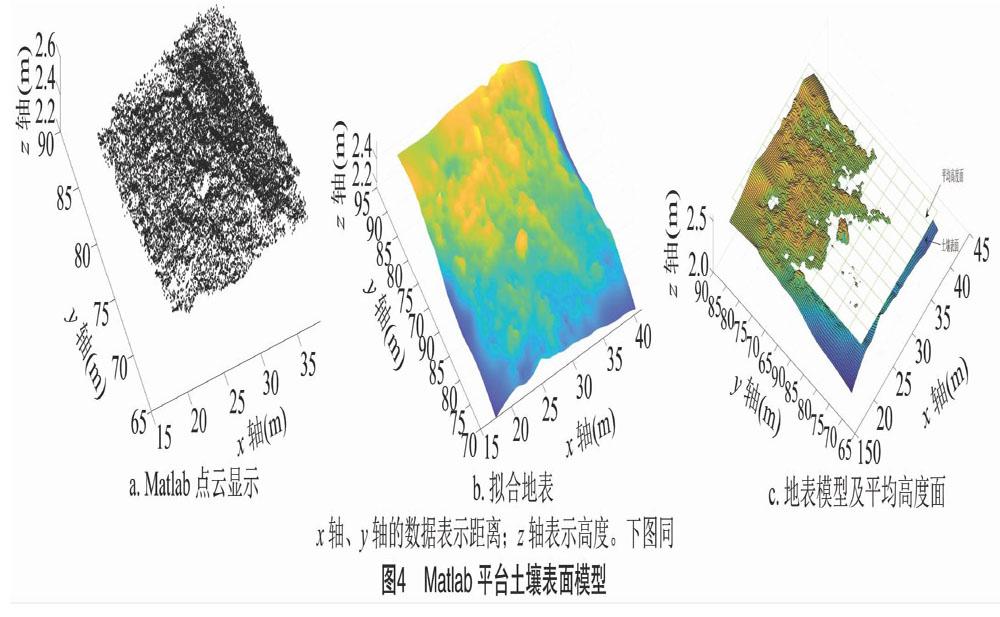
在Matlab 2018平台上读取并显示三维点云,利用平台自带的surf算法功能将离散点云拟合为表面,在遍历点云同时提取每个点的高度值计算平均值,得到平均高度面。通过公式(4)、公式(5)自动计算全域粗糙度[8],并通过Matlab平台进行三维可视化展示,如图4所示。
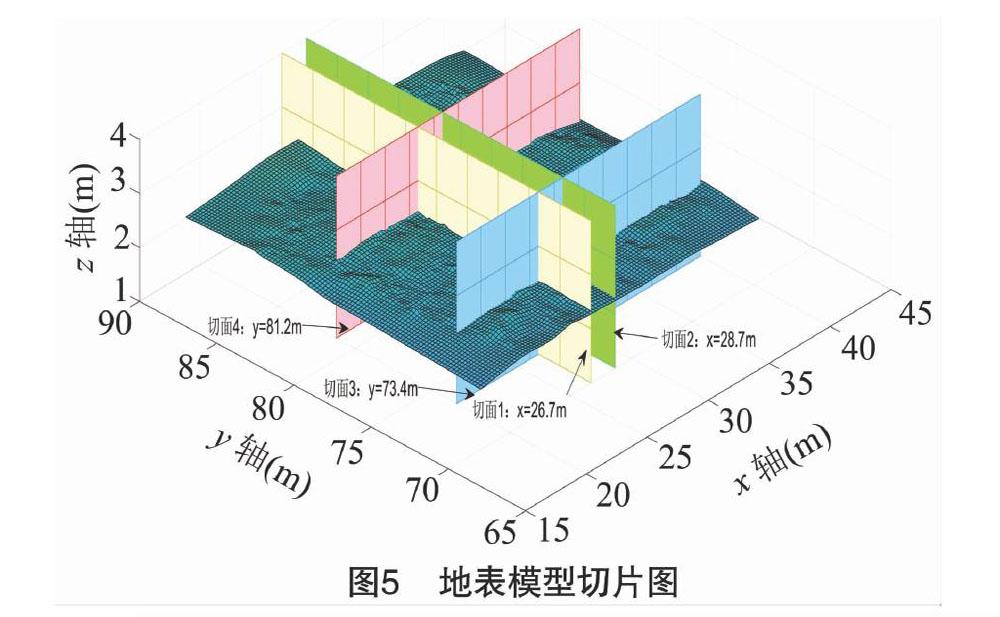
为了评价该方法的可行性和可靠性,采用全站仪无反射观测方法测量土壤表面线性分布均匀的离散点坐标。本试验随机选取了4个方向,并通过4个方向垂直切片获得地表模型的切片图,结果如图5所示。
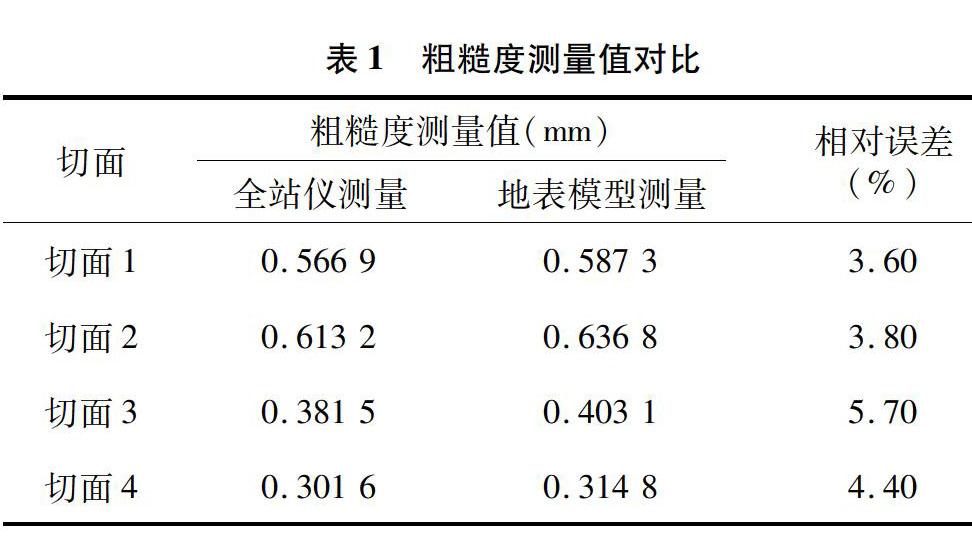
切平面与土壤表面的交线构成了该位置的土壤表层断面,将其与全站仪测量值进行对比。如图6所示,通过图像创建地表模型得到的断面形态与全站仪测量的形态大致相似,而全站仪均匀测量时,可能会跳过制高点或最低点的测量,导致损失一些极值信息。而由序列图像创建的地表基本保留了土壤表面的凸起和凹陷。以全站仪测量值为标准值,计算切面处粗糙度,如表1所示。
试验结果(表1)表明,地表模型测量土壤表面粗糙度与全站仪测量的值较为接近,本试验2种方法的相对误差在6%以下,因此基于序列图像三维重建及粗糙度测量是一种可视化的自动测量方法,利用无人机和Matlab处理平台能够实现大面积遥控测量和数据分析自动化及可视化。
3 结论
基于相机成像原理,逆推图像坐标系到世界坐标系的转换数学模型,通过重叠图像间特征点匹配求解转换数学模型,从而将图像重叠区域的同名点恢复到三维真实空间,得到目标物的三维点云数据。利用Matlab平台将点云进行表面拟合并计算全域的土表粗糙度,通过4个任选方向切片试验,验证了该方法测量的二维粗糙度与全站仪测量值的相对误差在6%以下。该方法相对于传统方法的优越性还体现在能进行自动化的大面积测量,获得连续面域粗糙度,为农业服务提供基础数据。参考文献:
[1]梁 勇,杨 磊,吴秋兰,等. 地表粗糙度影响下的GNSS-R土壤湿度反演仿真分析[J]. 武汉大学学报(信息科学版),2018,43(10):1546-1552.
[2]匿 名. 我国智慧农业发展规模前景趋势分析[J]. 新农业,2019(4):15.
[3]李晓洁,赵 凯,郑兴明. 基于激光三角法的地表粗糙度测试仪的研制[J]. 农业工程学报,2012,28(8):116-121.
[4]黄炯荣. 基于无人机序列图像的多视图几何三维重建[D]. 南昌:东华理工大学,2018:18-22.
[5]高天寒,杨子艺. 图像序列的增量式运动结构恢复[J]. 中国图象图形学报,2019,24(11):1952-1961.
[6]丁 波,石若明. 消费级无人机倾斜摄影测量三维模型精度评价[J]. 北京建筑大学学报,2019,35(4):37-42.
[7]赵京东,杨凤华,郭英新. 散乱点云去噪与简化的统一算法[J]. 计算机应用,2017,37(10):2879-2883.
[8]Xu L,Zheng C L,Wang Z C,et al. A digital camera as an alternative tool for estimating soil salinity and soil surface roughness[J]. Geoderma,2019,341:68-75.韦玉翡,赵建贵,高安琪,等. 温室环境参数模糊专家控制系统的设计[J]. 江苏农业科学,2021,49(6):183-188.
