Delta机器人分拣平台的机构尺度综合与分析
2021-04-29李思凡王海芳
李 亮,李思凡,王海芳
(东北大学秦皇岛分校控制工程学院,河北秦皇岛066004)
随着“中国制造2025”强国战略的推进实施,我国正从劳动密集型向现代化制造业方向发展。Delta 机器人以其刚度大、精度高、速度快等特点,广泛应用于医药、食品、电子等领域,代替人工分拣作业,市场需求庞大。合理地确定机构尺度参数是平台开发的重要环节。因此,面向特定的生产作业现场的空间需求,设计出结构紧凑且性能优良的机构,对于Delta 机器人的普及应用具有重要的现实意义。
针对Delta机器人的尺度综合一直是国内外学者研究的热点问题[1]。Laribi 等[2]通过给定一个正方体任务空间,以在该区域各点与可达边界距离最小为优化目标,采用遗传算法得到了结构最小的最优解。Liu 等[3]提出了给定圆柱型工作区域的最小外接空间的计算方法,通过约束运动性能指标给出了应用于直线型Delta 机器人的算例。张利敏等[4]以尺寸、速度、刚度和精度为约束条件,利用奇异值分解原理,提出以基于单轴最大驱动力矩全域最大值最小为优化目标,对Delta 机器人进行了动力学尺度综合。
Delta 并联机器人常配备视觉和气动执行器等装置完成“Pick-and-Place”操作,以实现在流水线上的高速分拣作业。其作业轨迹多以门字形路径为主[4]。图1 为典型的 3 自由度 Delta 机器人,其中运动平台通过3 条完全相同的运动链连接固定平台。图中,主动臂由转动关节驱动,从动臂的两个杆均由球关节连接,为防止两杆间扭转常布置有拉簧。这样从动臂的3 组平行四边形结构可使动平台始终与定平台保持平行的姿态,实现空间内的三平移运动。
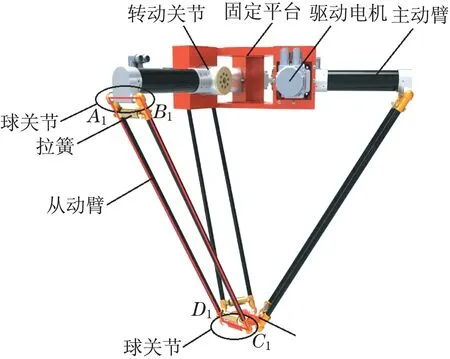
图1 Delta分拣机器人结构Fig.1 Structure of Delta sorting robot
1 运动学数学模型的建立
由于Delta 机器人每条从动臂均为平行四边形,A1B1和C1D1两线段中点间的距离不变,因此,可简化该结构并建立坐标系[6],如图2 所示。令从动臂和主动臂长度为La和Lb,固定平台和运动平台外切圆半径为R和r,固定平台上OBi与静坐标系x轴正方向的角度为ηi,i=1,2,3。

图2 简化的机构及坐标系Fig.2 Simplified mechanism and coordinate system
E点坐标为

若动平台圆心O'坐标为(x,y,z),则点Pi坐标为
由从动臂杆长不变,有约束方程:


舍弃角度过大的解,则有逆解:

2 雅可比矩阵的求解
雅克比矩阵又称为一阶运动影响系数,是机构操作速度与关节速度之间的映射,也可以看作是从关节空间到操作空间的运动速度的传动比[7]。同时,也是进行机器人灵巧度研究的基础。若X=[x,y,z]T表示运动平台中心点的位置坐标,对时间求导由定义可知速度关系为

则式中J即为雅可比矩阵。将式(3)整理可得

做一阶泰勒展开并对时间求导,可得到

整理得

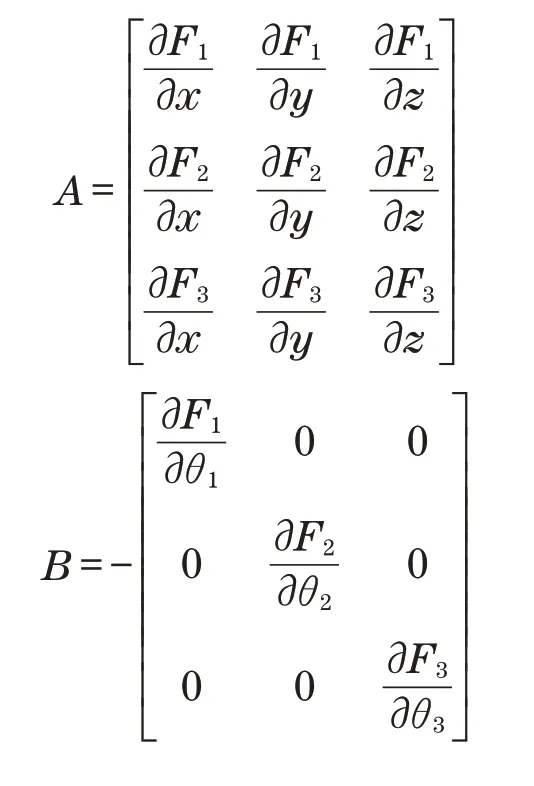
式中:
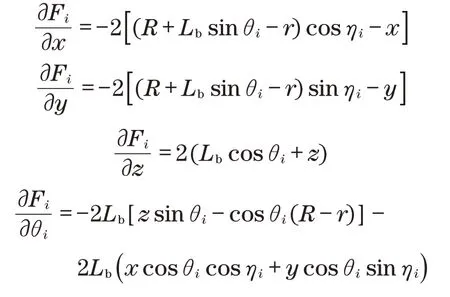
观察式(9)中矩阵A和B均是已知量,由此可以得出Delta并联机器人的雅克比矩阵为

式中:
3 灵巧度性能指标
灵巧度是衡量机器人运动性能的重要指标,由于并联机器人雅可比矩阵呈病态分布时,其逆矩阵的精度降低使运动传递失真,这种失真程度的定量指标通常被称作灵巧度[8]。目前灵巧度性能指标主要有条件数和可操作度两种。文献资料表明,对于纯移动或纯转动的机构,通常采用条件数作为灵巧性指标[9]。对于Delta 机器人显然条件数相较于可操作度更为合理。
1982年,Salisbury 等[8]提出了雅克比矩阵的条件数,其定义为

通常采用雅可比矩阵的Frobenius 范数计算条件数,矩阵的Frobenius范数定义为[10]

式中:tr(·)为矩阵的迹,即矩阵对角线各元素之和。
4 给定设计工作区域下的尺度综合
尺度综合即按已知构型和运动学参数确定机构中各构件的几何尺寸。鉴于并联机器人运动空间相对较小,为满足指定生产现场的作业需求,在进行尺度综合时,须保证机构具有紧凑的结构尺寸,且兼顾优良的运动学性能。
4.1 可达工作空间边界解析方程的确定
将Delta 并联机器人的运动学公式(3)开方并化简可得

式中:d=R-r。
将式(12)改写为

式中:

则方程有解的条件为

即

运动平台中心点X(x,y,z)需满足三个支链约束方程,若函数Qi=0 时,位于工作空间边界之上;当Qi<0时,位于工作空间之内。
观察式(13)中Delta机器人三支链运动约束方程Qi=0,可知其边界曲面为关于x、y、z的三元隐函数方程,其已知量为从动臂杆长La和主动臂杆长Lb;固定平台外接圆半径、运动平台外接圆半径差d及固定平台上OBi与静坐标系x轴正方向的夹角ηi,且其函数值小于0 时可表达该点离边界的远近程度[11-12]。
4.2 基于惩罚函数法目标函数的建立
鉴于分拣作业多以门字形路径为主,给定一个形状规则的矩形体作为设计工作区域。该设计工作区域可用8 个顶点来表示[12]。在静坐标系下各点坐标图3所示。

图3 给定设计工作区域及其顶点坐标Fig.3 Prescribed workspace and its point coordinate values
由于结构尺寸一定时,设计工作区域相对于机器人工作空间的位置待定,即离静坐标系原点的Z坐标值H为可优选变量,因此,进行尺度综合选择优化变量为

4.2.1 结构最小化函数表达式
为保证所设计Delta机器人的可达工作空间边界距离给定设计工作区域最近,即满足结构尺寸最小的优化目标。定义设计工作区域的8 个顶点,距离边界的度量权值尽可能的小,因此,主函数F1可定义为

式中:QK为8个顶点的集合。
4.2.2 以边界与设计区域相对位置约束的惩罚项由于机器人尺度参数不同,其可达工作空间的边界定不相同。为了确保所设计的Delta并联机器人可达工作空间能够使设计工作区域都包含在其中,定义惩罚项F2如下:

式中:c取正无穷。
4.2.3 以条件数指标约束的惩罚
为保证所设计的Delta机器人在设计工作区域具有良好的运动学性能,以条件数为灵巧度指标。文献资料表明,当Delta 并联机器人的条件数k(J)<5时具有较优的运动学性能[12]。建立性能约束惩罚项:

式中:c取正无穷。
4.2.4 以机构几何尺寸约束的惩罚项
据文献资料研究表明,当机构尺寸La、Lb、d满足d<La-Lb时,不会发生三条从动臂共面的情况发生,能够有效地避免该奇异位形的出现,使机器人设计更为合理[13]。故建立惩罚项F4如下:
式中:c取正无穷。
综合式(14)~式(17)建立尺度综合目标函数为

4.3 求解算例
给定图(3)中设计工作区域的尺寸为a=300 mm,b=300 mm,H=200 mm。至此,尺度综合化为无约束优化问题,采用Matlab 软件优化工具箱中内嵌遗传算法进行求解计算[16]。设置种群规模80,遗传代数100,变量个数4,设置变量下边界[100 100 50 -1 000],上边界[1 000 1 000 500 0],其余参数按默认处理。经运算得到适应度进化曲线及最优个体参数图,如图4所示。
图4中可以看出,目标函数经100次迭代运算后,最佳适应度值与平均适应度值已较接近,反映出种群进化良好,最优个体数值稳定在该尺度下已基本不变。最后考虑到加工方便,经圆整后最优解向量为

5 尺度综合结果分析
将算例最优解F*代入式(13),在Matlab 中画出其隐函数边界方程的三维图像(Z坐标最高取至设计工作区域上表面),并将图3中8个顶点坐标连线组成设计工作区域,两者相对位置如图5所示。

图4 遗传算法优化结果Fig.4 Optimization results of genetic algorithm

图5 设计工作区域与工作空间边界的相对位置Fig.5 Relative position between the prescribed workspace and the boundary of workspace
从图5 中知,Delta 机器人的可达工作空间为三条支链构成的三圆环交集部分,设计工作区域包含在内符合设计要求,且距离适中反映出结构紧凑性较好。
将设计工作区域上下表面离散成散点坐标,并代入反解式(5),通过式(9)~式(11)可求得条件数性能指标的分布图,如图6和图7所示。
从图中可以看出,上下表面条件数在3~5范围之内,其中在设计工作区域中心附近性能最好,4个顶点处相对稍差,且下表面顶点处较于上表面顶点处略好,机器人在设计工作区域内整体运动学性能良好。

图6 设计工作区域上表面条件数分布图Fig.6 Distribution of condition number on the upper boundary of the prescribed workspace
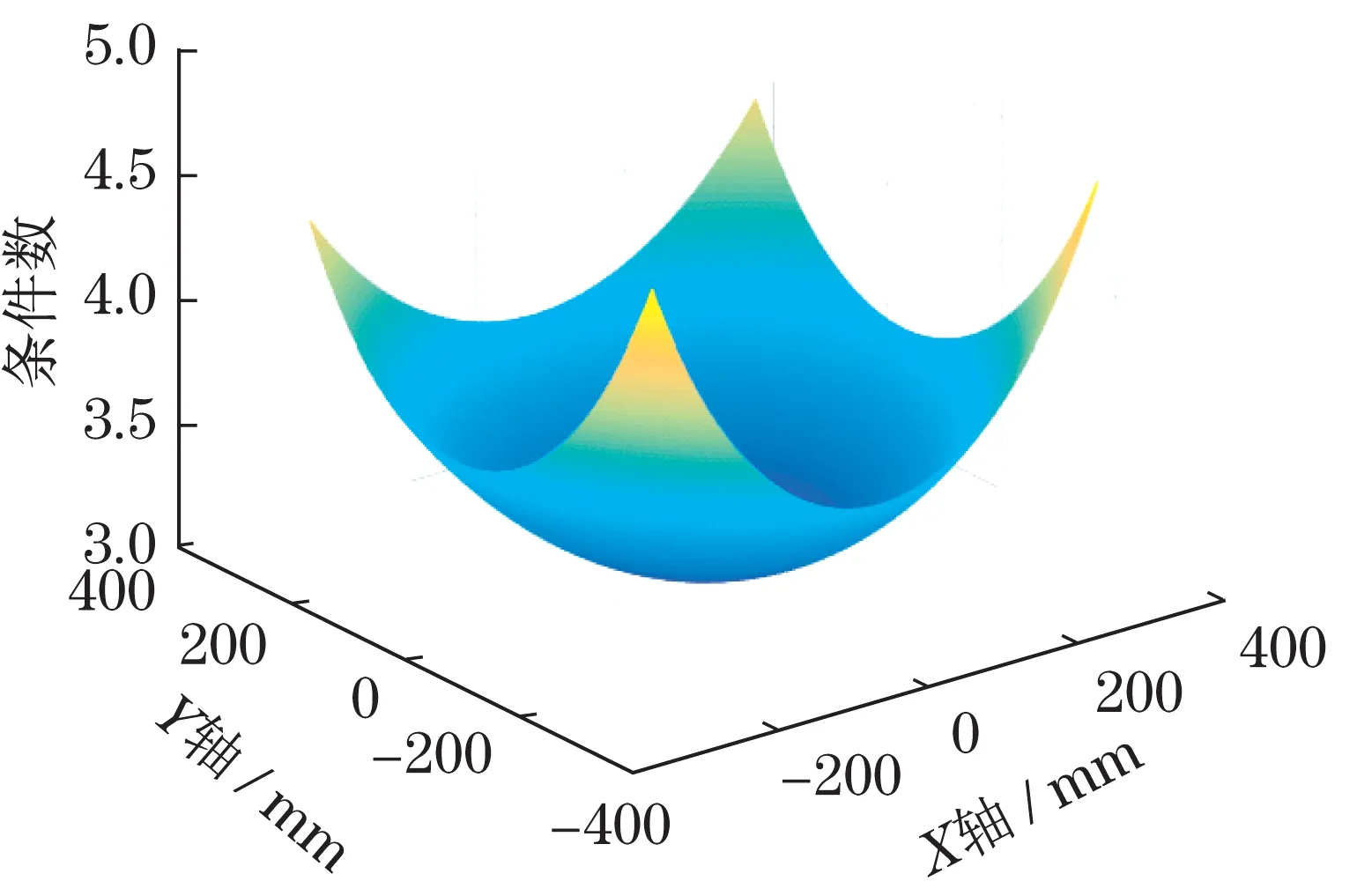
图7 设计工作区域下表面条件数分布图Fig.7 Distribution of condition number on the lower boundary of the prescribed workspace
6 结语
Delta 机器人的机构尺度综合是分拣实验平台设计开发工作的重要环节,其灵巧度作为重要的运动学性能指标是设计质量优劣的关键问题。采用本文中尺度综合方法可针对分拣作业现场根据末端执行器的操作路径给定设计工作区域,综合考虑结构紧凑性、灵巧度及奇异位形等因素,基于遗传算法方法求解出运动性能优良的机构尺度参数。但考虑到分拣作业会处于高负载、高速、高加速度的状态下运行,在采用轻质构件材料的同时,进一步研究中需计入动力学因素的影响。
