T 型翼主动控制策略的数值研究
2021-04-27姜宜辰白钧宇孙一方李永坤张桂勇
姜宜辰,白钧宇,孙一方,李永坤,张桂勇*,3
1 大连理工大学 船舶工程学院,辽宁 大连 116024
2 高新船舶与深海开发装备协同创新中心,上海 200240
3 大连理工大学 工业装备与结构分析国家重点实验室,辽宁 大连 116024
0 引 言
高速船由于其细长的船体以及高弗劳德数,相比在较低弗劳德数下航行的传统单体船,有更大的垂荡和纵摇运动响应[1]。而T 型翼作为一种重要的船舶纵向运动减摇附体,具有能有效提高船舶的纵向运动阻尼和附加阻力小的优点,在高速船上得到了广泛应用[2]。因为可以随航态实时改变水平翼攻角的T 型翼具有很好的减摇效果[3],所以T 型翼的主动控制方法一直是近年来国内外研究的热点。
李鹏等[4]采用模型试验方法,针对一对艏部水翼和T 型翼对阻力及垂向运动的综合影响进行了分析,结果表明,被动翼复合船型在风浪中航行时,其快速性与原船型相当,而耐波性则有大幅提升。杨强等[5]对某三体船及其适配T 型翼在规则波与不规则波下的运动响应进行了计算,结果显示,在高速运动下最高可使纵摇响应幅值降低50.33%。杨帅等[6]通过Simulink 建立控制模型,并采用PID 控制对控制效果进行了仿真,结果显示,采用主动控制系统的穿浪双体船的运动响应与被动式相比降低了30%。刘冰[7]构建了T 型翼和扰流板的升力模型并对某高速双体船进行了水动力计算,计算了采用纵摇角、纵摇角速度和纵摇角加速度联合控制方式下的减摇效果,结果显示,采用主动控制策略后垂荡与纵摇的最大减摇幅值可达50%。
孙一方等[8]采用纵摇信号对T 型翼的减摇效果进行分析讨论,采用力矩控制的方式得到了T 型翼攻角随船体运动变化的控制方程,通过裸船在波浪下的运动响应计算T 型翼的线性控制参数C,再应用控制参数C对T 型翼的摆角进行主动控制,得出在纵摇角、纵摇角速度和纵摇角加速度中,采用纵摇角速度信号控制的T 型翼减摇效果最佳。其研究表明,该主动控制方式对纵摇运动的减摇效果显著,但对垂荡与艏部加速度的减摇效果有限。
为此,本文将以Wigley 船型为研究对象,基于细长体理论,分别计算2 种航速(Fr=0.3,0.5)下及5 种波长/船长比(λ /L=0.75,1.25,1.75,2.25,2.75)规则波中裸船与被动式T 型翼船运动的垂荡、纵摇和艏部加速度运动响应;然后,在此基础上讨论不同主动控制方式的减摇效果;最后,将线性控制计算结果与无T 型翼裸船及被动式T 型翼船的结果进行对比,得出不同主动控制方式下T型翼减摇效果的影响并分析其优劣性。
1 计算模型
由于高速船具有细长体的特征,船舶垂向与横向运动速度的量级远高于船舶沿船长方向速度的量级,所以可以通过边界元法将三维流体问题降阶为多个二维流体问题,以此对船舶的运动进行近似求解。在这种近似求解方法中,每个固定的空间位置都有相应的切片,以计算船舶在穿过某个切片时的运动[9-10]。将船舶穿过的一系列二维切片的运动在空间上组合起来,即可得到船舶在航行过程中各个方向的运动响应。本文计算依据的流场速度势公式与边界条件、三维船体的运动方程和船体与流体运动动态耦合的求解方程的推导过程参见文献[8]。
1.1 T 型翼控制策略分析
为求解T 型翼产生的力或者力矩,文献[4]给出了求解方法。船体以给定的弗劳德数迎浪航行,T 型翼的水平翼的投影面积设为A,升力系数为CL,T 型翼产生的垂向升力FT和升力矩MT的表达式如下:
式中:lF为水平翼尾缘距离船舯的距离; ρ为流体密度;U为船的航速;α 为水平翼的攻角。
若要求得升力与升力矩,首先需确定水平翼的攻角 α,其表达式为

式中:φ为T 型翼摆角,本文规定摆角正方向与船纵摇方向相反; γb为 船纵摇角; θF为船体运动速度影响的附加角,如图1 所示。图中:y˙b为船体垂荡速 度; γ˙ 为 纵 摇 角 速 度; ξ˙为 水 平 翼 处 流 体 质 点 垂直方向速度; θF为小量,其表达式为


图1 T 型翼攻角分析图Fig. 1 Analysis of T-foil angle of attack
由于水平翼处流体质点垂直方向速度 ξ˙为小量,其影响可以忽略不计,故最终得到T 型翼的升力和升力矩的表达式为:
1.1.1 T 型翼被动控制
T 型翼进行被动控制时,其摆角始终为某一固定角度φfixed,可得被动控制下T 型翼产生的升力与升力矩为:

1.1.2 T 型翼线性主动控制
T 型翼的线性主动控制是指T 型翼产生的垂向力和纵摇力矩与T 型翼控制信号通过控制参数呈线性关系,因此其水平翼的摆角变化是连续的。采用纵摇角速度和艏部运动速度这2 种信号分别对T 型翼的摆角进行实时控制,进而实时控制T 型翼产生的力矩。现将各种控制信号统称为S。船在刚开始运动时,T 型翼为被动控制,此时监测S的最大值Smax、 最小值Smin和 幅值Sa。最大值与最小值分别对应T 型翼的摆角 ±φmax。主动控制开始后,线性控制T 型翼摆角为
2 数值计算与结果分析
2.1 计算模型
本文数值计算采用的是Wigley III 船型,这是一种细长的理想船型,如图2 所示,船型参数如表1 所示。
T 型翼(NACA 0018)纵向位置位于距船舯1.3 m的船底处。T 型翼的详细尺寸如表2 所示,三维图如图3 所示。
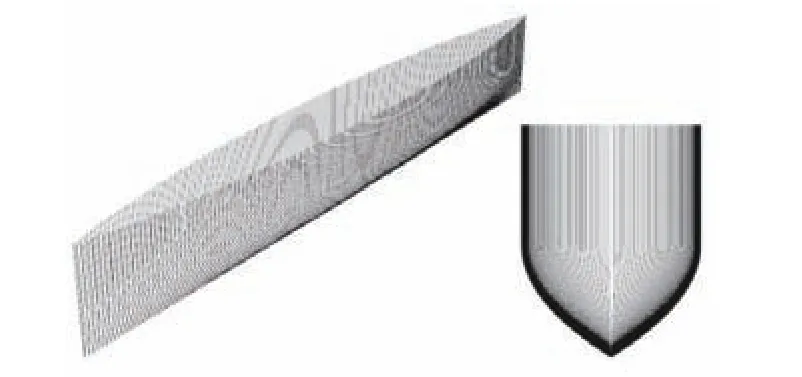
图2 Wigley III 船型Fig. 2 Hull form of Wigley III
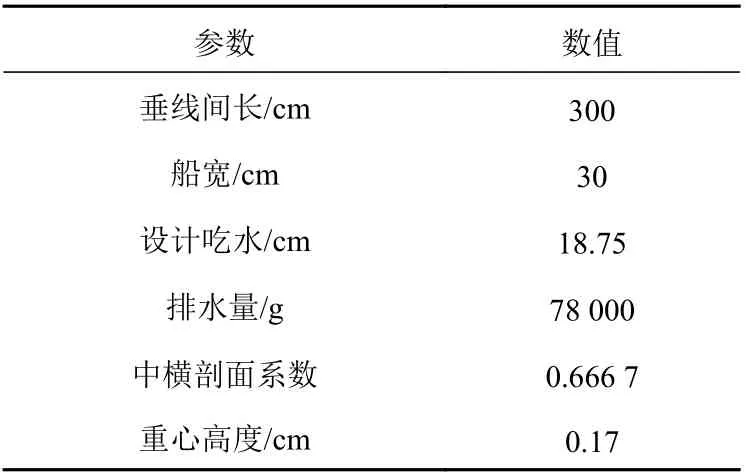
表1 Wigley III 船型参数Table 1 Parameters of Wigley hull III

表2 T 型翼参数Table 2 Parameters of the T-foil

图3 T 型翼示意图Fig. 3 Schematic diagram of the T-foil
在实际工程应用中,T 型翼的摆角范围有严格的限制,一般在 ±15◦以内。因此,本文研究控制T 型翼减摇的过程中,给定T 型翼摆角范围为−15◦<φ<15◦。
2.2 数值模型验证
在Fr=0.3 的 航 速 及 不 同 规 则 波( λ/L=0.75,0.907,1.25,1.38,1.5,1.75,2;H=0.038 m) 下对Wigley III 船型的纵摇与垂荡运动的运动响应幅值(RAO)曲线进行数值计算,并将计算结果与试验值[11]进行对比,以验证本文数值方法的准确性。本文船的垂荡、纵摇和艏部运动加速度响应幅值均采用无量纲化计算:

式中:L为 船长;g为 重力加速度;b为艏部运动加速度;y∗为 无量纲垂荡幅值; γ∗为无量纲纵摇幅值;b∗为无量纲艏部运动加速度; ζ为波幅。通过计算以上7 种工况下垂荡与纵摇运动响应,得到其运动响应幅值曲线如图4 所示。
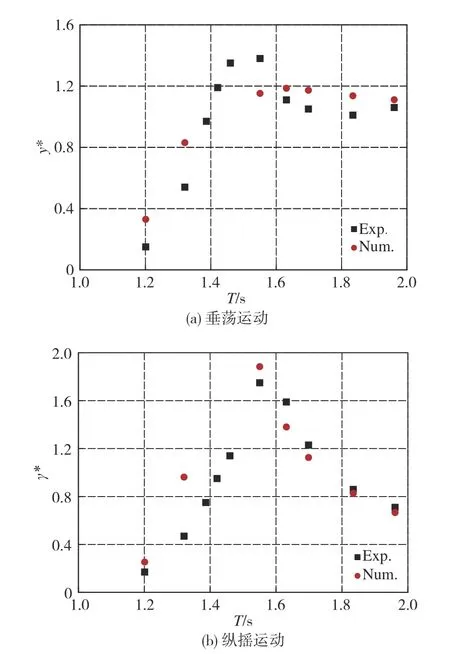
图4 数值计算结果与试验值的对比Fig. 4 Comparison of numerical results and the experimental results
由图4 可见,数值计算的趋势与试验结果基本吻合,误差小于20%,说明本文数值模型计算结果能够与试验值很好地匹配,验证了本文数值模型的准确性。
2.3 不同控制策略下T 型翼减摇效果
采用被动控制和线性主动控制(纵摇角速度信号和艏部运动速度信号)的Wigley III 模型,对比不同工况下的垂荡、纵摇和艏部加速度幅值,并分析不同策略下的减摇效果。
2.3.1 T 型翼的摆角变化
在线性主动控制过程中,T 型翼的摆角是随控制信号呈线性变化的。对控制信号和T 型翼摆角做归一化处理,得
式中:S1为 归一化控制信号;φ1为归一化T 型翼摆角。
以Fr=0.3, λ/L=1.75工况为例,对于以纵摇角速度为信号的线性控制,T 型翼摆角和控制信号的对应关系如图5 所示。在同样的工况下,对于以艏部运动速度为信号的线性控制,T 型翼摆角和控制信号的对应关系如图6 所示。
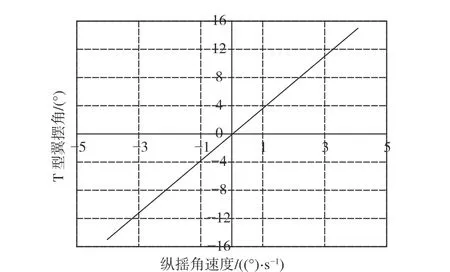
图5 T 型翼摆角与纵摇角速度的对应关系(Fr=0.3,λ /L=1.75)Fig. 5 The relationship between T-foil angle and angle velocity of pitch(Fr=0.3, λ/L=1.75)
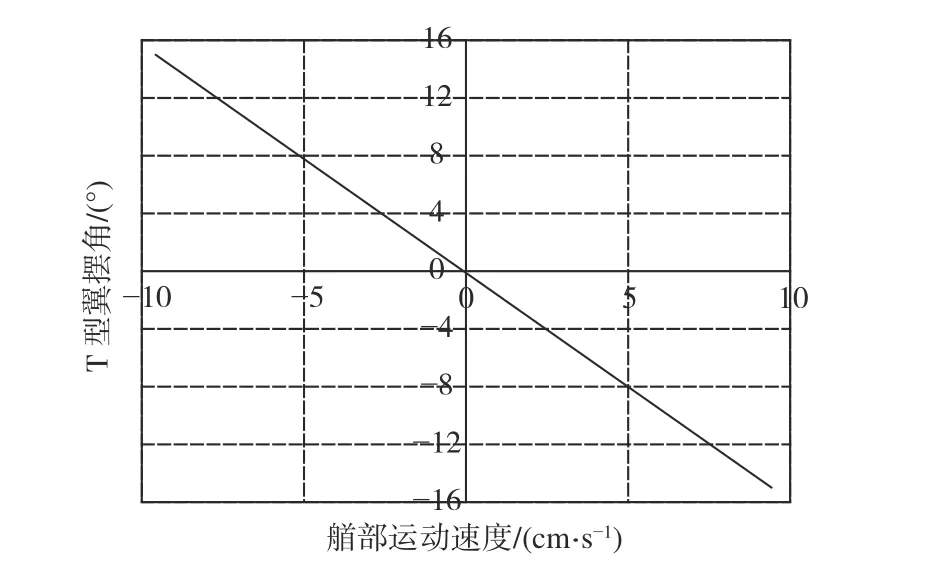
图6 T 型翼摆角与艏部运动速度的对应关系(Fr=0.3, λ/L=1.75)Fig. 6 The relationship between T-foil angle and bow velocity(Fr=0.3, λ/L=1.75)
船在航行过程中,T 型翼始终处于船艏下方。图5 与图6 中的纵摇角速度和艏部运动速度均是在被动控制下采集得到,符合加装T 型翼船舶在运动过程中的实际情况。这也可以使更小的运动响应对应到更大的T 型翼摆角,提高T 型翼的减摇效果。
2.3.2 垂荡运动响应
2 种航速(Fr=0.3,0.5)下的垂荡运动响应分别如图7 和图8 所示。图中, ωe为遭遇频率。表4和表5 所示为各种控制策略对垂荡运动的减摇效果。
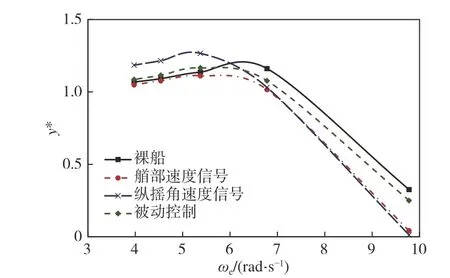
图7 Fr=0.3 时3 种控制方式的垂荡运动响应Fig. 7 Heave motion response with three types of control method at Fr=0.3

图8 Fr=0.5 时3 种控制方式的垂荡运动响应Fig. 8 Heave motion response with three types of control method at Fr=0.5
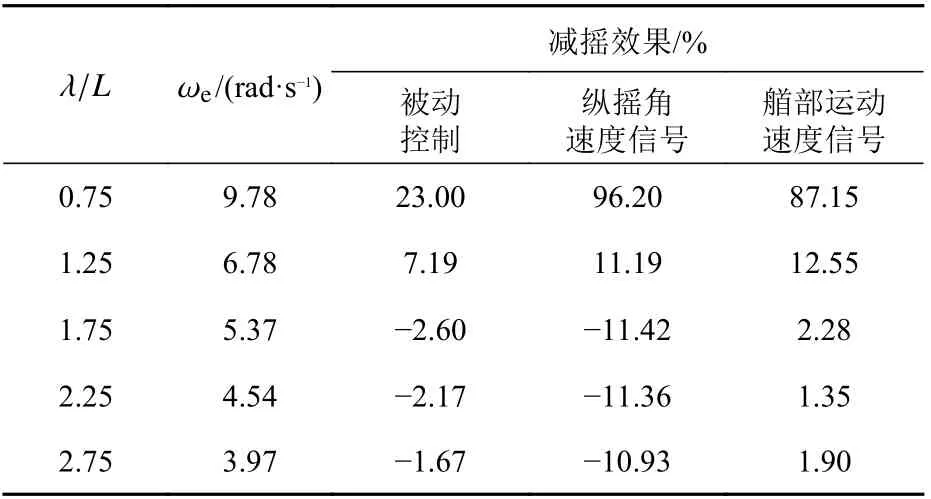
表4 Fr=0.3 时的垂荡运动减摇效果Table 4 Damping effect of heave motion at Fr=0.3

表5 Fr=0.5 时的垂荡运动减摇效果Table 5 Damping effect of heave motion at Fr=0.5
在中速(Fr=0.3)情况下,裸船的垂荡运动响应峰值在 ωe=6.78 rad/s处,此时采用艏部运动速度信号进行控制具有最佳的减摇效果,可达12.55%;在ωe=9.78 rad/s时,纵摇角速度信号具有最佳的减摇效果,可达96.20%;被动控制在高频区(ωe>9 rad/s)对垂荡运动的减摇效果相比另外2 种均较弱,减摇效果不明显。在低频区( ωe<5 rad/s),3 种控制的减摇效果均减弱了,被动控制和纵摇角速度信号的线性控制会使垂荡运动有所增加;艏部运动速度信号的线性控制在低频区减摇效果最佳。
在高速(Fr=0.5)情况下,纵摇角速度信号和艏部运动速度信号的线性主动控制的减摇效果较被动控制有很大提高。裸船的垂荡运动响应峰值在ωe=8.60 rad/s处,采用艏部运动速度信号进行控制具有最佳减摇效果,可达73.72%,纵摇角速度信号减摇效果为49.02%;在低频区(ωe=4.80 rad/s时),艏部运动速度信号的减摇效果可达15.85%,纵摇角速度信号仅为4.65%。
综上所述,对于垂荡运动的减摇效果,在中速和高速情况下,艏部运动速度信号具有最大的减摇效果。
2.3.3 纵摇运动响应
2 种航速(Fr=0.3,0.5)下的纵摇运动响应分别如图9 和图10 所示。表6 和表7 所示为各种控制策略对纵摇运动的减摇效果。
在中速(Fr=0.3)情况下,裸船的纵摇运动响应峰值在 ωe=6.78 rad/s处,艏部运动速度信号具有最佳减摇效果,可达44.98%。3 种控制方式下,船纵摇运动的变化趋势大体相似,在峰值处减摇效果最大,远离峰值处减摇效果逐渐降低。在低频区( ωe=4.54, 3.97 rad/s),艏部运动速度信号的减摇效果可达47.47% 和56.34%,纵摇角速度的减摇效果在20%~30%之间,被动控制的减摇效果则低于10%。

图9 Fr=0.3 时3 种控制方式的纵摇运动响应Fig. 9 Pitch motion response with three types of control method at Fr=0.3
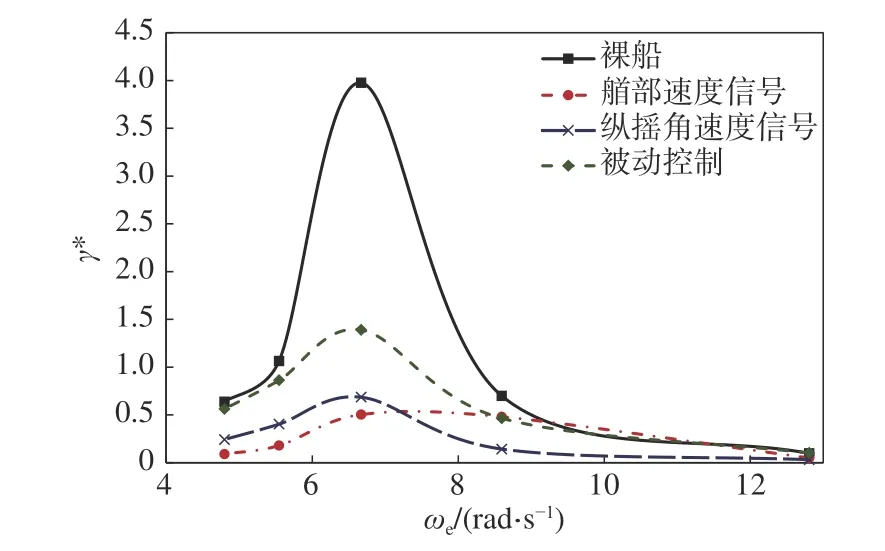
图10 Fr=0.5 时3 种控制方式的纵摇运动响应Fig. 10 Pitch motion response with three types of control method at Fr=0.5
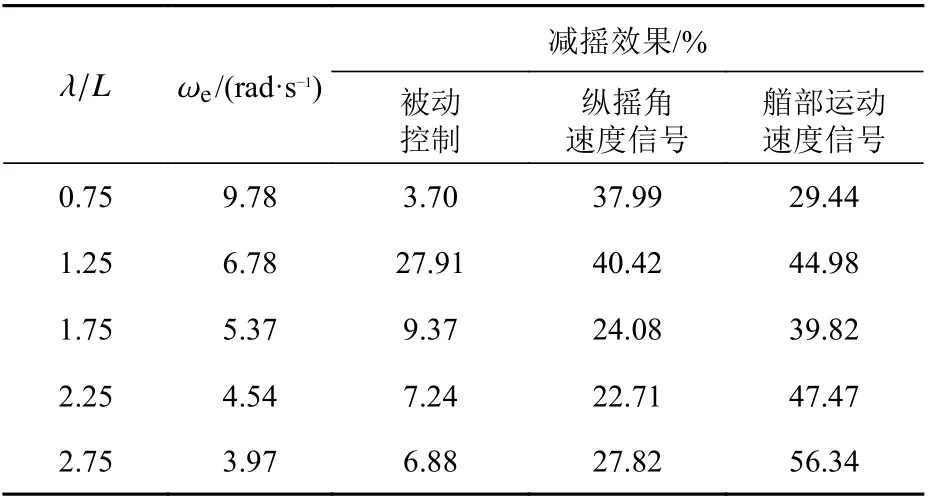
表6 Fr=0.3 时的纵摇运动减摇效果Table 6 Damping effect of pitch motion at Fr=0.3

表7 Fr=0.5 时的纵摇运动减摇效果Table 7 Damping effect of pitch motion at Fr=0.5
在高速(Fr=0.5)情况下,裸船的纵摇运动响应峰值在 ωe=6.67 rad/s处,艏部运动速度信号具有最佳减摇效果,可达87.33%,纵摇角速度信号次之,可达82.78%。在 高 频 区( ωe=12.81, 8.60 rad/s),纵摇角速度信号的减摇效果最为明显,约达70%;在低频区( ωe=5.55, 4.80 rad/s),艏部运动速度信号具有最佳减压效果,达80%以上。
综上所述,对于纵摇运动的减摇效果,在2 种航速下,在高频区时纵摇角速度的减摇效果更加显著,在低频区则是艏部运动速度信号的减摇效果更佳。
2.3.4 艏部运动加速度运动响应
2 种航速(Fr=0.3,0.5)下的艏部运动加速度运动响应分别如图11 和图12 所示。表8 和表9所示为各种控制策略对艏部运动加速度运动的减摇效果。
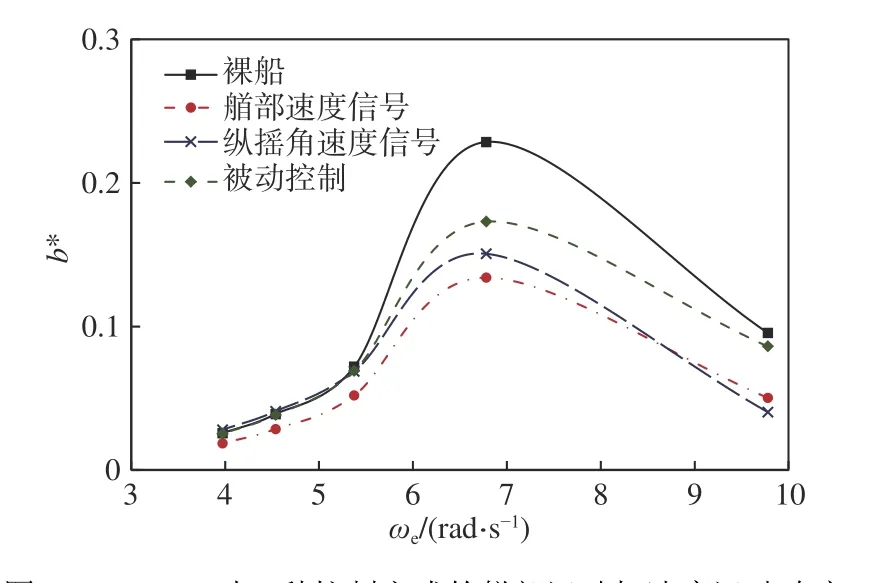
图11 Fr=0.3 时3 种控制方式的艏部运动加速度运动响应Fig. 11 Bow acceleration motion response with three types of control method at Fr=0.3
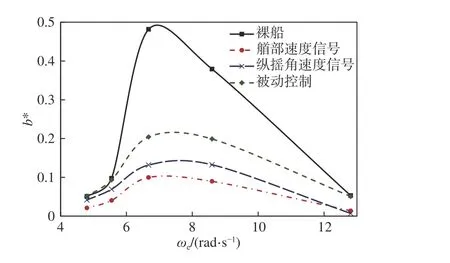
图12 Fr=0.5 时3 种控制方式的艏部运动加速度运动响应Fig. 12 Bow acceleration motion response with three types of control method at Fr=0.5

表8 Fr=0.3 时的艏部运动加速度减摇效果Table 8 Damping effect of bow acceleration motion at Fr=0.3

表9 Fr=0.5 时的艏部运动加速度减摇效果Table 9 Damping effect of bow motion acceleration at Fr=0.5
在中速(Fr=0.3)情况下,裸船的艏部运动加速度峰值出现在 ωe=6.78 rad/s 处。除高频区(ωe=9.78 rad/s)外,艏部运动速度信号在另外4 种波长下均具有最佳减摇效果,在 ωe=3.97 rad/s时,减摇效果可达27.45%,远高于另外2 种控制方式。纵摇角速度信号在高频区( ωe=9.78 rad/s)减摇效果较好,但在低频区( ωe=4.54, 3.97 rad/s)则有一定程度的减益影响。
在高速(Fr=0.5)情况下,裸船的艏部运动加速度峰值出现在 ωe=6.67 rad/s处。与低速时情况一样,除高频区( ωe=12.81 rad/s)外,艏部运动速度信号在另外4 种波长下均具有最佳的艏部运动加速度减摇效果,在ωe=4.80 rad/s时,减摇效果可达58.45%,而纵摇角速度信号的减摇效果则仅为18.40%。
综上所述,对于艏部运动加速度,艏部运动速度信号的减摇效果和纵摇角速度相比有很大的提升,特别是在低频区,减摇效果十分显著。
2.4 结果分析
船在运动过程中,T 型翼对船产生的升力和纵升力矩与船的垂荡及纵摇运动方向相反,这样的力和力矩可以抑制船的纵向运动响应。在计算过程中,针对T 型翼对船产生的升力及升力矩进行了监测。升力矩是升力与水平翼尾缘距船舯距离的乘积,与升力具有同样的变化形式。本节将以Fr=0.5 时, λ/L=1.75,2.25 这2 工况为例进行分析。2 种主动控制T 型翼对船产生的升力矩如图13所示。
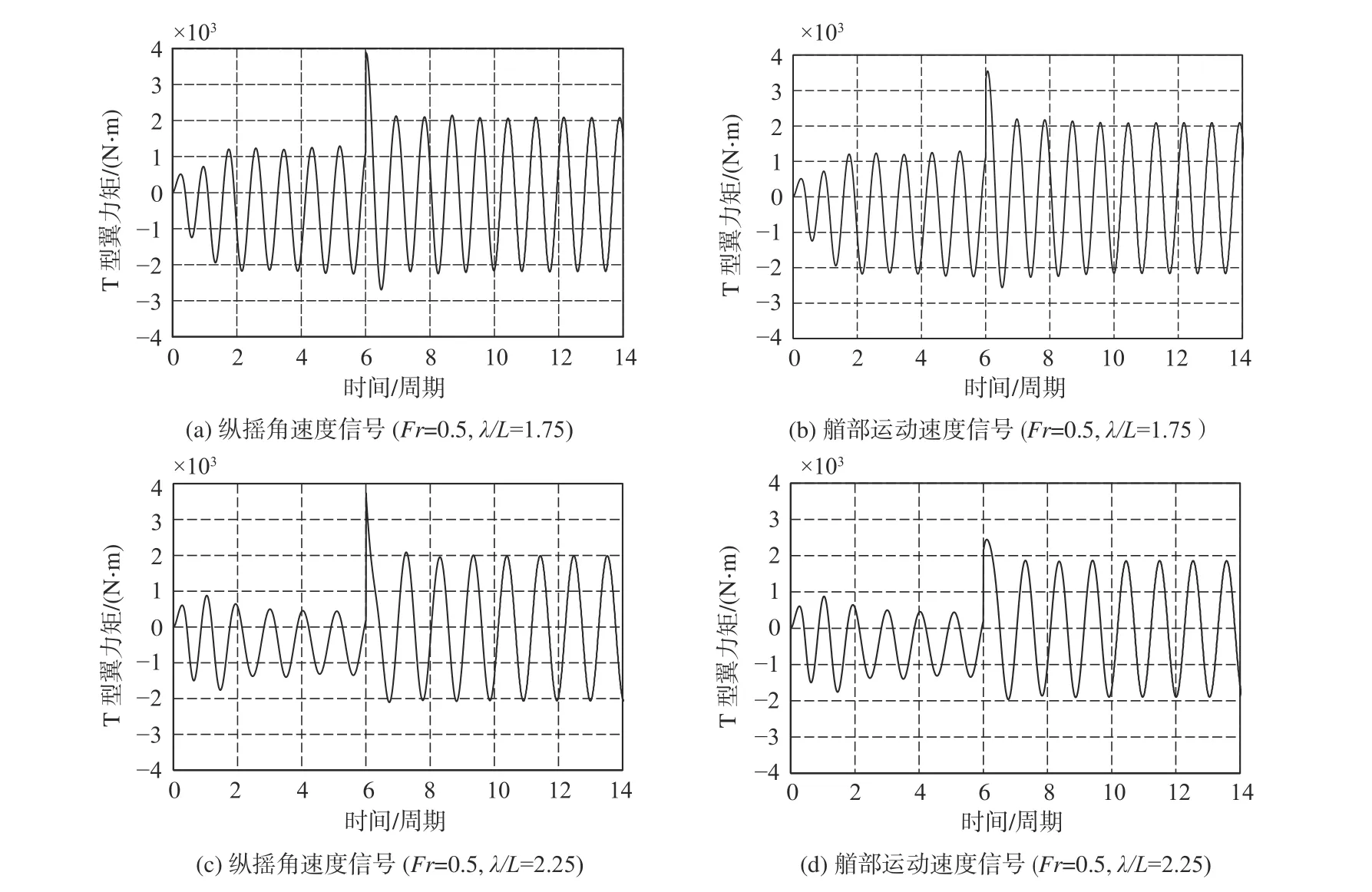
图13 2 种T 型翼主动控制策略在2 种工况下对船产生的纵摇力矩Fig. 13 The pitching moment of two type T-foil active control strategies for the ship in two cases
在图13 中,T 型翼在第6 个波浪周期后开始进行主动运动控制,在此之前,为被动控制。进行主动控制之后,T 型翼对船产生的升力矩有大幅度的增长,说明主动控制相比被动控制具有更大的升力矩可用于抑制船舶的纵向运动。
在T 型翼主动控制减摇过程中,所产生的升力与升力矩是随控制信号变化的,如图14 和图15所示。图中,工况为Fr=0.5, λ/L=1.75的升力矩与运动响应均做了归一化处理。
如图13 所示,T 型翼产生的升力矩为正弦变化形式,有幅值、频率和相位3 种主要参数。在Fr=0.5, λ/L=1.75和2.25 这2 个工况下,艏部运动速度信号相比纵摇角速度信号具有更好的减摇效果,并且在同一工况下采用不同的控制策略产生的升力矩幅值与频率一致。如图14 和图15 所示,艏部运动速度信号控制策略所产生的升力矩与纵摇速度和垂荡速度在相位上均相差约1/8 个周期,纵摇角速度信号控制策略所产生的升力矩与纵摇角速度无相位差,但与垂荡速度相差约1/4 个相位,导致在1/4 个周期内T 型翼产生的升力矩与垂荡速度方向同向,故对垂荡与艏部运动的减摇有减益效果。而艏部运动速度信号为纵摇与垂荡这2 种运动的耦合信号,具有更佳的减摇效果。
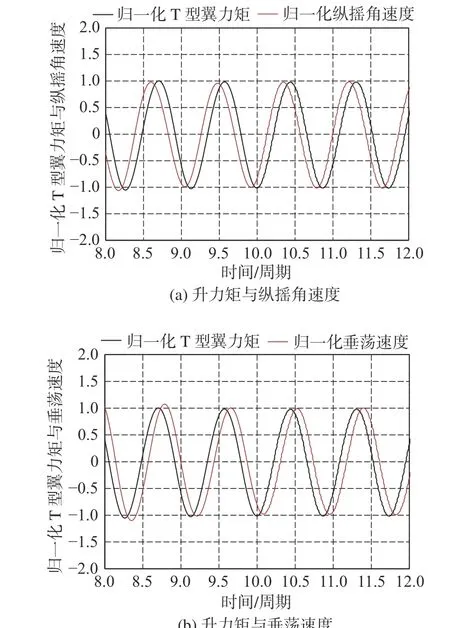
图14 采用艏部运动速度控制方法的升力矩与纵摇角速度和垂荡速度的变化关系Fig. 14 The relationship between lifting moment and pitching angle velocity and vertical velocity controlled by the heading velocity control method

图15 采用纵摇角速度控制方法的升力矩与纵摇角速度和垂荡速度的变化关系Fig. 15 The relationship between lifting moment and angular velocity in pitch and heave velocity controlled by the pitch angle velocity control method
3 结 论
本文采用细长体理论方法计算了Wigley III船型在规则波上的运动,并分别采用被动控制、纵摇角速度信号线性控制和艏部运动速度线性控制这3 种控制方法,计算并分析了其对船舶纵向运动的减摇效果,主要得到如下结论:
1) 在共振区,被动控制T 型翼对垂荡运动、纵摇运动和艏部运动加速度具有较好的减摇效果,但在高频区和低频区,其减摇效果相对有限。在低频区,被动控制对纵摇与艏部运动加速度的减摇效果约为5%~10%。
2) 纵摇角速度信号线性主动控制解决了被动控制在低频区减摇效果不理想的问题。在高速情况下,纵摇运动的减摇效果最佳可达82.78%,在低频区其减摇效果也可达62.12%,艏部运动加速度的减摇效果最佳可达72.68%。但是在中速低频区,纵摇角速度信号对垂荡运动和艏部运动加速度均有一定程度的减益,为约−10%。
3) 艏部运动速度信号线性主动控制综合考虑了纵摇与垂荡这2 种纵向运动,与被动控制和纵摇角速度信号相比,在低频区,垂荡运动的减摇效果有较大改善,没有出现减益现象。高航速下,艏部速度信号线性主动控制在各个工况下都具有很好的减摇效果,在低频区的减摇效果要优于纵摇角速度信号和被动控制。在高速低频区,纵摇运动的减摇效果可达86.05%。对于艏部运动加速度,在中、高速情况下,艏部运动速度信号的减摇效果较纵摇角速度信号有很大的提升,平均提高了10%~20%。
综上所述,以艏部运动速度信号对T 型翼进行线性控制对于垂荡、纵摇与艏部运动加速度具有最佳的减摇效果。
