基于GEM-PHD粒子滤波的移动定位自更新传播算法
2021-04-19黄庆东姚雪茜
黄庆东,姚雪茜,张 淼,周 赟,郝 森,刘 青
(西安邮电大学 通信与信息工程学院,陕西 西安 710121)
无线传感器网络(Wireless Sensor Networks,WSN)部署的位置状态信息状况,往往决定了所收集信息的价值[1-2]。在很多应用场景中(如洞穴、外太空探测、水下探测等),其复杂的地理环境等情况制约了节点位置信息获取、执行定位、跟踪和监测等任务的实现。在移动场景中,定位的复杂性使传统的静态节点定位算法失效或者性能急剧恶化。因此,依赖少量锚节点对网络实现实时定位变得尤为重要。
很多研究者针对移动WSN自定位问题展开了研究。文献[3]采用广义回归神经网络,结合卡尔曼滤波(Kalman Filter,KF)和无损卡尔曼滤波(Unscented Kalman Filter,UKF),对移动未知节点进行实时定位与追踪,但未知节点严格依赖于锚节点,且环境参数需要预先训练。一些研究通过规划单一锚节点的最优移动轨迹估计场景中静态节点的位置[4-5],但是定位效率较低,且没有考虑锚节点定位误差校正问题。基于UKF的移动节点定位算法[6],通过在深井巷道间隔布置静态锚节点实现定位与监测,但是此方法需要预先布设定位区域,且定位精度有限。文献[7]利用收集的接收信号强度(Received Signal Strength Indicator,RSSI)指纹库信息及k-近邻对目标位置估计,并采用目标跟踪滤波算法,结合粒子滤波(Particle Filter,PF)精确目标位置,然而k-近邻算法在对目标进行位置匹配时,会丢掉许多位置信息且计算复杂度大,导致目标定位精度不高。基于单簇概率假设密度[8](Single Group Probability Hypothesis Density,SG-PHD)的滤波算法,用于估计移动车辆环境中的静态和动态特征。但是估计在移动车辆位置时,没有考虑到车辆本身的运动报告信息对自身位置的影响。文献[9]提出了广义运动的同时提出定位与映射(Generalized Motion Simultaneous Localization and Mapping,GEM-SLAM)算法,基于概率假设密度(Probability Hypothesis Density,PHD)滤波器原则,在对目标进行定位的同时,修正传感器自身的位置。但是该算法严格依赖锚节点,易受其影响,在未知应用场景定位时不易实施。
针对以上问题,将文献[9]的方法进行推广,拟提出基于GEM-PHD滤波器的移动定位自更新传播算法。该算法仅在初始化时利用少量锚节点作为初始位置参考,采用GEM-PHD实现定位未知节点,构造虚锚节点,并对自身位置修正更新,逐步实现其他未知网络节点定位,再通过已定位节点位置更新修正,最终实现全网络移动节点实时定位和位置更新。
1 WSN移动定位模型
采用恒速移动模型定义节点运动模型,假设运动和量测噪声为加性高斯白噪声。WSN移动定位模型包括移动节点运动模型,节点的自身状态报告,以及节点对周边邻居节点的观测模型。
1.1 节点运动模型
观测节点的运动采用方位角和速度描述,全局状态表示为


方位角是观测节点全局状态中的非线性变量,将观测节点的全局状态分割为线性子空间pt和非线性依赖γt,此时观测节点全局状态表示为
线性子空间和非线性依赖的状态转移方程式分别为
(1)
(2)

节点的运动模型采用恒速模型,由笛卡尔坐标系上的全局坐标和速度组成,定义为

(3)
其中:Dt为状态转移矩阵;ψt,n是零均值协方差为Qt的高斯白噪声。
节点的运动报告信息为
描述当前状态rt下节点获得的自身速度和方位角信息表达式分别为
yt,v=hpt+ϖt,v
(4)
1.2 节点观测模型
节点观测模型描述节点对邻居节点的观测,其包含距离、方位角和俯仰角,表达式为
其中:m∈(1,...,Mt)表示在t时刻节点的探测数,Mt表示t时刻探测到的节点总数,其建模表达式为

在实际应用中,检测算法受环境杂波和精度影响会导致虚警和漏检现象,因此,目标观测用无序离散点集表示,建模为随机有限集[10](Random Finite Sets,RFS),其公式为
其中,Kt为监测区域的杂波,时间上服从泊松分布,空间上服从均匀分布。
2 移动定位模型形式化建模
多目标递归贝叶斯滤波器利用贝叶斯递推规则传递多目标的后验概率密度,采用RFS对目标状态集Xt和测量集Zt进行处理,St表示t时刻Υt个目标节点的RFS,建模表达式为
其中,Bt表示t时刻新生节点过程,此时多目标递归贝叶斯滤波器递推式[11]为
(5)
其中:f(·)表示多目标概率密度函数;Ω1:t-1表示1到t-1时刻的目标观测的历史测量集;f(St|rt,Ω1:t)为t时刻多目标概率密度函数,依据贝叶斯理论,其表达式为
其中:f(Ωt|rt,St)为t时刻多目标探测置信度;f(St|rt,Ω1:t-1)为t时刻多目标预测概率密度函数;δ表示微分符号。式(5)代表未知个未知目标检测跟踪分类的最优解,该最优性是由贝叶斯最优多目标状态估计器的存在性决定的。但在实际应用中,多目标贝叶斯递归滤波器不易于计算,需要采取近似方法实现。
根据f(St|rt,Ω1:t-1)或f(St|rt,Ω1:t)所服从的分布,得到其对应的时变PHD滤波器,在高斯分布假设下,式(5)滤波器可以等效表示为高斯混合概率密度滤波器(Gaussian Mixture Probability Hypothesis Density,GM-PHD)[11],其递推公式为
λ(·)表示多目标高斯混合PHD,表达式为
3 移动节点定位自更新传播算法
移动节点定位自更新算法主要包含以下步骤。
步骤1假设锚节点和未知节点均处于移动状态,锚节点作为初始观测者,对周围未知节点进行观测并拥有自身运动报告信息,采用(Rao-Blackwellized Particle Filter,RBPF)滤波和GM-PHD滤波,完成对锚节点通信范围内未知节点位置估计。
步骤2利用相同方法对同样未知节点进行反向定位,进一步精确自身位置。
步骤3升级为虚锚节点,从而参与后续自身通信范围内邻居节点定位。
3.1 算法系统流程
锚节点作为观测者,其通信范围有限且都处于移动状态,锚节点仅能观测到自身通信范围内的未知节点,但是所提算法将已经定位的节点升级为虚锚节点,从而增加移动节点定位中锚节点数量,对整个移动群体进行定位。
虚锚节点在后续参与未知节点定位时,可能会造成定位误差累积传递,因此,采用反向定位策略,用锚节点探测周围环境,获得探测信息,结合RBPF滤波和GM-PHD滤波估计未知节点位置,将角色逆转,即利用估计的未知节点位置估计锚节点位置,选取锚节点位置与估计位置误差最小的值所对应的未知节点估计值,作为未知节点的最优估计值,进一步降低误差的累积传递,具体定位算法原理图如图1所示。
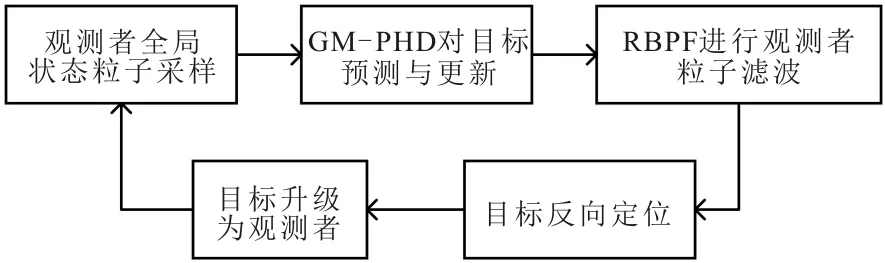
图1 自更新传播定位算法原理图
3.2 GEM-PHD粒子滤波移动定位自更新算法
GEM-PHD粒子滤波为广义运动概率密度粒子滤波,其包含了RBPF滤波和GM-PHD滤波。对锚节点全局状态进行采样,得到锚节点全局状态粒子,将未知节点的状态建模为高斯混合模型[12](Gaussian Mixture Model,GMM),采用GM-PHD滤波对未知节点状态进行预测与更新,并利用RBPF对锚节点进行粒子滤波。
采用粒子滤波后,对未知节点进行反向定位确定其较优的位置,并升级为虚锚节点,将其作为观测者,对自身通信范围内的未知节点定位,详细的计算步骤包括以下几个方面。
1)RBPF采样。其核心思想是将所求观测节点的全局状态向量进行线性分解。对于非线性部分,采用粒子滤波器进行滤波,而线性部分采用KF滤波器进行滤波。依据RBPF滤波核心思想[13],将锚节点全局状态向量分解为非线性部分和线性部分,关系式为
q(rt|y1:t)=q(γtv|y1:t,γ)q(pt|γt,y1:t,v)
其中:y1:t为1到t时刻对观测节点的历史观测集;y1:t,v和y1:t,γ分别表示1到t时刻对观测节点速度和方位角的历史观测值;q(γt|y1:t,γ)和q(pt|γt,y1:t,v)分别是方位角和线性子空间的后验强度。
步骤1对于方位角采用PF滤波,将其建模为卷绕高斯分布[14],对锚节点全局状态向量采样ρ个粒子,i∈(1,…,ρ),粒子中方位角表示为

步骤2将方位角粒子代入线性部分,建模为线性高斯分布,其表达式为

步骤3锚节点进行全局状态经采样,其表达式为
2)利用GM-PHD预测未知节点状态。观测信息集合来自新生的未知节点时,对新生的未知节点PHD建模为GMM,其新生未知节点的PHD公式为

步骤1新生未知节点均值为
步骤2新生未知节点协方差为
步骤3新生未知节点高斯组件权重为
在预测阶段,对存活的未知节点状态集合建模为GMM模型,其存活节点的PHD表示为
步骤1t-1时刻未知节点的均值预测表达式为
其中,Dt为式(3)中的状态转移矩阵。
步骤2t-1时刻未知节点的协方差预测表达式为
步骤3权重预测表达式为
3)GM-PHD更新未知节点状态。将观测信息集合建模为GMM模型,对未知节点更新的未知节点PHD表达式为
采用EKF进行更新,其观测模型为非线性,计算步骤如下。
步骤1计算EKF中的新息协方差矩阵与增益矩阵,其表达式分别为
步骤2更新均值,公式为
步骤3更新协方差,公式为
步骤4更新权重,公式为


4)计算未知节点多检测置信度,其计算公式为

5)高斯剪枝与合并。对未知节点的GMM进行预测与更新后,会使得高斯组件数呈指数增长,为了抑制组件数的组合式爆炸,对高斯组件采取剪枝与合并操作。定义高斯剪枝域为T,合并域为U,最大允许高斯组件数为lmax。剔除权重小于T的高斯组件,并计算组件之间的合并距离[13],小于等于U则合并为一个高斯组件。当计算的高斯组件数大于lmax时,按照权重值由大到小提取前lmax个高斯组件。
6)未知节点状态提取。在执行完流程5)后,提取出权重值大于0.5的高斯组件。
7)计算粒子权重,具体步骤如下。
步骤1计算观测节点观测报告置信度为


步骤2粒子权值的计算公式为
步骤3权值归一化
8)重采样。粒子滤波执行结束后,利用分层采样,复制权值较大的粒子,得到最优的锚节点粒子和未知节点粒子值。
9)反向定位。重采样后得到的未知节点定位精度无法验证,因此采用反向定位策略,利用流程8)存储的未知节点状态估计值,采用GM-PHD算法估计锚节点,得到锚节点的估计值。计算锚节点真实值与未知节点对其估计值之间的欧式距离,选择估计误差最小的值所对应的未知节点状态估计值,记为未知节点的最优估计值。
10)升级虚锚节点。当未知节点已知自身位置估计值后,升级为虚锚节点,继续探测周围存在的未知节点。如果探测到未知节点,返回流程1)继续执行。如果探测不到未知节点,那么当前时刻对于WSN中所有移动节点定位结束,下一时刻接着从锚节点开始继续定位过程。
4 仿真与实验结果分析
为验证所提算法的有效性与真实性,实验利用Python软件进行仿真,实验场景设定为三维空间,其区域为100 m×100 m×20 m。
仿真区域内放置1个锚节点,8个未知节点,初始设定节点间的通信范围为10 m,移动路径轨迹设定为直线,锚节点初始坐标为(0,5,1.8),方位角为π/4,在方位角方向上速度为3 m/s,锚节点和未知节点的真实轨迹如图2所示。
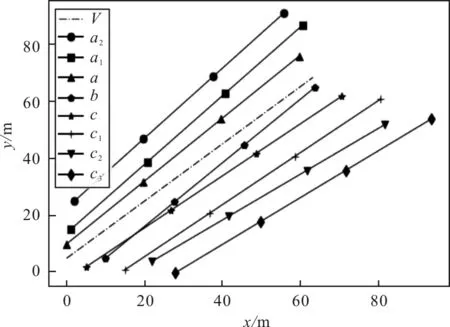
图2 节点真实轨迹
图2中V代表锚节点真实轨迹,其余为未知节点真实轨迹。设定锚节点为0跳节点,利用多跳方式使其他节点确定自身到锚节点的跳数,图2中a,b,c代表锚节点V一跳范围内的未知节点,其初始位置和速度分别为a=(0,10,0,2,2.2,0)、b=(10,5,5,1.8,2,0)、c=(5,2,10,2.2,2,0),而a1,a2分别是未知节点a一跳和二跳范围内的节点,其初始位置和速度分别为a1=(1,15,10,2,2.4,0)、a2=(2,25,10,1.8,2.2,0),c1,c2,c3分别是未知节点c一跳、二跳和三跳范围内的未知节点,其初始位置和速度分别为c1=(15,1,10,2.2,2,0)、c2=(22,4,10,2,1.6,0)、c3=(28,0,10,2.2,1.8,0)。
表1为仿真实验时所用参数。
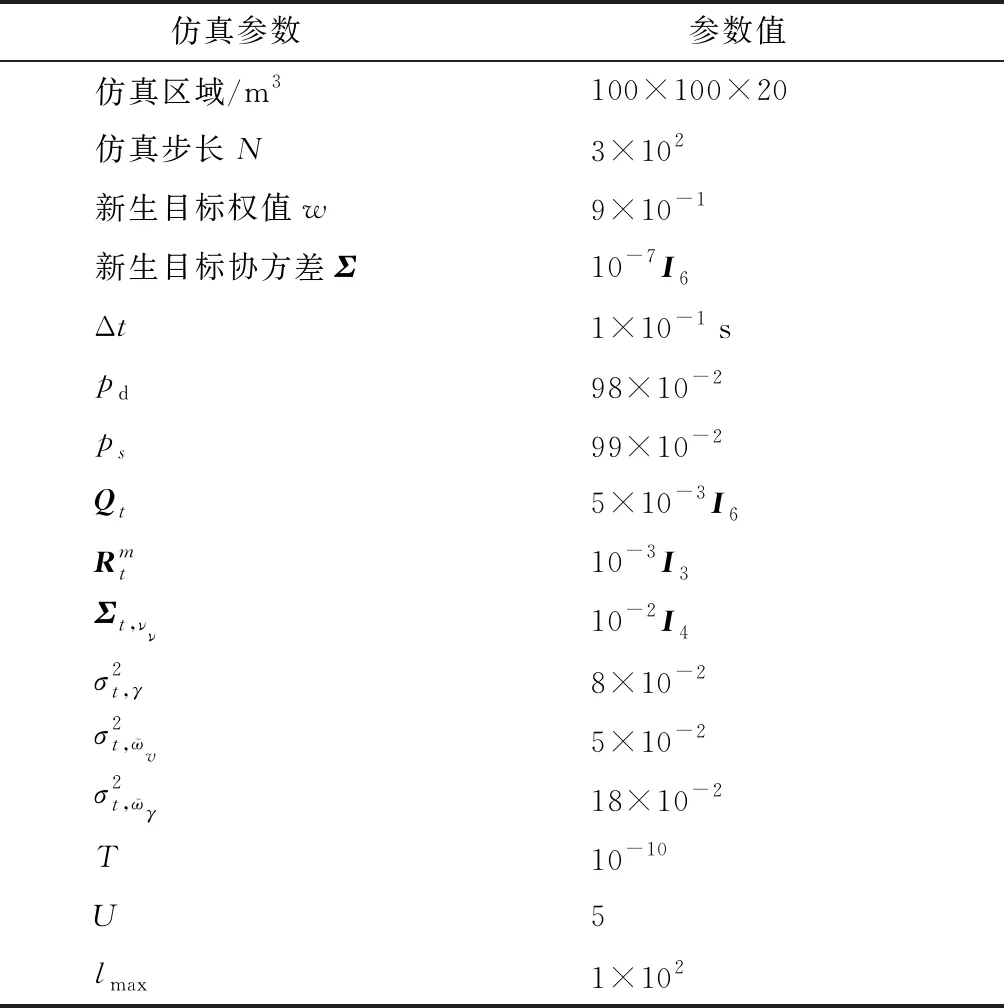
表1 实验参数设置
依据表1的仿真参数,将其用于所提算法中进行算法的有效性测试。应用GM-PHD滤波对未知节点预测与更新时,其存活率与探测率二者之间相互独立,且均独立于节点状态。实验应用蒙特卡洛思想进行50次仿真,随机抽取其中某次的定位结果如图3所示。
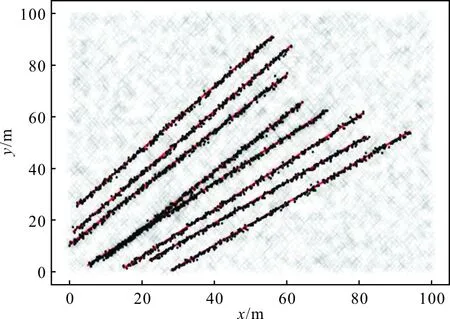
图3 节点位置估计
图3中阴影部分为杂波点,黑色点为对于未知节点在某一时刻的位置估计值,与图2中节点的真实轨迹值相比,很好地对节点的实时位置进行了估计。
为了验证算法的有效性,将上述仿真实验场景与实验参数应用于所提的基于GEM-PHD粒子滤波的移动自定位更新传播算法,与未加反向定位的所提算法相比,实验设定两次仿真环境均相同的情况下,进行50次蒙特卡洛实验,对其平均定位误差与定位覆盖率进行统计。对于节点的平均定位误差和目标数估计误差可分别表示为

未知节点可以利用反向定位策略选取自身相对较优的位置估计,且在每一时刻,都可以选取关于自身位置的一个最优估计值,提升了节点的定位精度和定位覆盖率。因此,所提出的基于GEM-PHD粒子滤波的移动自定位更新传播算法,与未加反向定位策略的所提算法相比,节点的平均定位精度提升了20%左右,也说明了算法的有效性,图5为目标数估计误差,误差存在是由于监测区域内存在杂波和漏检以及虚警等原因导致的。实验结果如图4和图5所示。

图4 所提算法与未加反向定位所提算法的比较
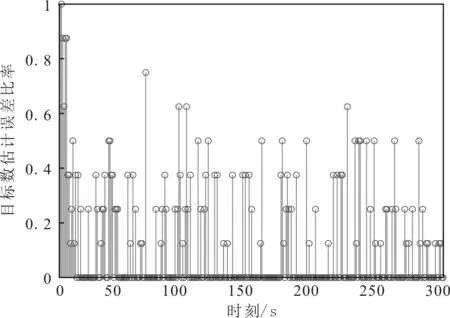
图5 目标数估计误差图
5 结语
针对无线传感器网络WSN中移动节点的实时动态定位和更新问题,提出了基于GEM-PHD粒子滤波的节点自定位更新算法,该算法结合RBPF滤波和GM-PHD滤波估计未知节点位置,通过反向定位策略进一步精确未知节点位置,并升级虚锚节点进一步对周围邻居节点定位。通过实验结果分析得知,与未加反向定位策略的基于GEM-PHD粒子滤波的节点定位算法相比,所提算法能够实现移动WSN中节点的高精确度定位,且可以实现整个移动群体的定位,能够有效地实现对移动WSN中节点的实时定位。
