基于二次雷达的列车辅助防护技术应用研究
2021-04-04王延翠杨丽丽王田农田庆
王延翠 杨丽丽 王田农 田庆

摘 要:文章介绍并对比了现有GNSS、激光雷达、一次雷达、二次雷达等常用列车测距技术手段。结合列车辅助防护需求和典型应用实例,介绍了基于二次雷达测距技术的列车辅助防护系统一般构成、工作原理、关键技术和工程化实施方案,针对基于二次雷达的列车辅助防护技术应用难点及问题进行了分析和总结,并对其未来技术发展方向进行了展望。
关键词:列车测距;二次雷达;辅助防护
中图分类号:TN958.96;U270.2 文献标识码:A 文章编号:2096-4706(2021)18-0051-05
Abstract: GNSS, LiDAR, primary radar, secondary radar and other common train ranging techniques are introduced and compared. Combined with train auxiliary protection requirements and typical application examples, this paper introduces the general composition, working principle, key technology and engineering implementation scheme of train auxiliary protection system based on secondary radar ranging technology. The application difficulties and problems of train auxiliary protection technology based on secondary radar are analyzed and summarized, and its future technical development direction is prospected.
Keywords: train ranging; secondary radar; auxiliary protection
0 引 言
列车的运行安全保障一直是轨道交通行业的重中之重,正常情况下,列车防护功能主要由列车自动防护系统(ATP)負责,但当ATP切除后,列车防护将全权交由司机负责,在列车通过隧道或小曲线段时视觉严重受限,行车时缺乏设备保障,为此,近年来涌现出多种测距手段应用于非ATP模式下的列车辅助防护。
列车行驶过程中面临隧道、弯道、坡道等复杂线路条件,以及雨雪雾等各种天气条件,如何实现前后列车实时有效测距和危险车距准确评估是本文的重要内容,通过实际应用案例介绍和总结,希望对列车测距技术和辅助防护技术的后续应用提供一定借鉴和参考。
1 列车测距技术发展现状
目前用于列车测距辅助防护的技术手段主要有GNSS定位、视频图像、激光雷达、一次雷达和二次雷达等。
1.1 GNSS定位
利用全球卫星定位系统(GNSS)结合多传感器技术融合的方法[1]来实现列车自主定位,再通过车-车或者车-地通信技术实现列车间的信息传输,传输的信息内容包括列车运行的速度、方向、公里标、线路号、时间戳等,获得列车的位置信息之后,对前后车动态距离进行计算,当两车间动态距离小于预先设定的安全预警限值时,系统将通过无线通信网络向后车发送预警信息[2]。车载设备根据接收到的预警信息,在安全预警显示设备上向司机给出当前状态的提示,为司机操作提供辅助。
GNSS定位可以有效利用现有GPS、北斗、移动通信等平台资源,建设费用较低,可在全铁路网的车辆上进行推广。其缺点是GNSS在隧道内,或者地形比较复杂的地方信号较差;系统依靠移动通信资源进行数据交互,系统复杂,可靠性不够;链路传输时延大,实时性不够。
1.2 视觉图像
利用视觉图像的辅助防护系统一般包含长焦和广角两个摄像头,长焦可见距离较远,在长直道具有优势,广角视距较近,但视角更开阔,适合于弯道、道岔等车速较低,视野较狭窄的场景。在列车运行过程中,长焦和广角同时采集视频,通过摄像头反馈的图像可识别出前方是否为道岔场景,并对列车前方限界内物体(包括列车、道岔、信号机、障碍物等)基于语义分割的轨道及列车识别技术进行障碍物(列车)检测和可见度计算给出识别结果。通过视频处理算法可以对识别出的前方物体进行测距及运动趋势判断,并能通过标注训练,识别出障碍物类型[3]。
视觉测距的主要问题是受天气影响严重,在大雾,大雨天气下无法使用。在夜间效果也很差,如果使用红外远距离摄像头可提升性能,但价格很高,同时视频设备组成复杂,可靠性较低,标注训练周期较长。
1.3 激光雷达
激光雷达,是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,做适当处理后,就可获得目标的有关信息。激光雷达通过脉冲信号测量前方物体距离。
激光雷达的特点是带宽大,目标分辨率高,可以获得极高的角度、距离和速度分辨率[4]。通常角分辨率不低于0.1 mard也就是说可以分辨3 km距离上相距0.3 m的两个目标,并可同时跟踪多个目标,距离分辨率可达0.l m,速度分辨率能达到10 m/s以内。距离和速度分辨率的提高可以获得目标的清晰图像。激光雷达的缺点是价格较高,探测距离太近,受限于1 km以内,受天气影响较大,在大雾天气下性能下降较快,目前多用于地面测绘,自动驾驶。
1.4 一次雷达
目前用的一次雷达主要是毫米波雷达,就是工作在毫米波频段的雷达。毫米波是指长度在1~10 mm的电磁波,对应的频率范围为30~300 GHz。毫米波雷达测距原理就是把无线电波(毫米波)发出去,然后接收回波,根据收发的时间差测得目标的位置数据和相对距离。根据电磁波的传播速度,可以确定目标的距离为:s=ct/2,其中s为目标距离,t为电磁波从雷达发射出去到接收到目标回波的时间,c为光速。
普通发射功率12 dBmW的毫米波雷达作用距离可达1.2 km,该雷达距离分辨率高,可识别目标大小,有成像应用,但技术还不成熟,且在弯道情况下无法使用,目前多用于自动驾驶领域的近距离测距[5,6]。
1.5 二次雷达
与毫米波雷达这种一次雷达不同,二次雷达(Secondary Surveillance Radar, SSR)是由询问雷达和应答雷达所组成的无线电电子测位和辨认系统。工作时由询问雷达发射电磁波,应答雷达接收到询问电磁波后被触发,继而发射应答电磁波,询问雷达根据接收到的应答电磁波,实现识辨,并根据发送和接收信号的时间间隔计算前后间距[7]。二次雷达性能稳定,可在隧道、弯道多种工况下使用,误警率低。
1.6 测距技术比较
列车辅助防护需要留有足够的制动距离用于预警,视觉图像和激光雷达探测距离太近应用较少,主要采用GNSS定位、一次雷达和二次雷达这三种方式,主要优缺点如以下所示。
GNSS定位:通过GNSS卫星信号来获取列车的运行状态信息,在隧道等环境下借助里程计(或涡流传感器、惯性导航仪和陀螺仪等传感器)得到列车的位置信息,再通过车-车通信或者车-地通信方式与前后车进行数据传输,从而实现彼此车距测量。这种方式由于传感器数据容易产生累积误差,从而影响到列车的定位精度。
一次雷达:利用雷达测量前后车相对距离信息,再根据距离信息做相应预警判断。一次雷达当发现前方有目标时就会进行报警,这种方式在隧道内、弯道、坡道受到诸多限制,极易发生误报警。
二次雷达:基于二次雷达测距获得前后两车相对距离信息,这种方法目前在城市轨道交通领域已有应用,同基于GNSS定位的手段相比,可应用于隧道中,且测距实时性大幅提高,目前的问题是能够测量的距离比较近,仅适用于低速列车使用。二次雷达采用应答方式通信,与一次雷达相比,在发射功率相等的前提下,作用距离大大提高。
随着技术的发展,列车测距辅助防护系统必然是多种传感器的融合,相互取长补短。二次雷达由于具备探测距离长和探测精度高的优点,在多种测距技术中占有非常重要的位置[8]。
2 基于二次雷达的列车辅助防护技术典型应用
基于二次雷达测距的列车辅助防护技术,近年来已经在城市轨道交通领域展开广泛应用。随着铁路运输持续向更高速度和更高密度方向的发展,围绕ATP切除模式下为司机提供列车辅助防护功能需求,采用二次雷达测距技术对前方列车进行实时探测、身份识别和信息提取,结合列车状态监控和制动能力,实现危险预判和报警提示,可为司机安全驾驶提供有力保障。
2.1 列车辅助防护系统构成及工作原理
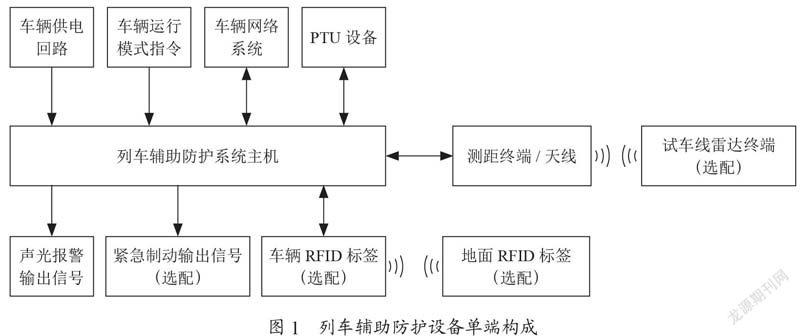
基于二次雷达的列车辅助防护系统一般由列车首端设备和尾端设备构成,二者构成完全相同,通过车辆硬线信号或网络通信数据辨别各自所在车厢号。单端设备典型构成如图1所示。
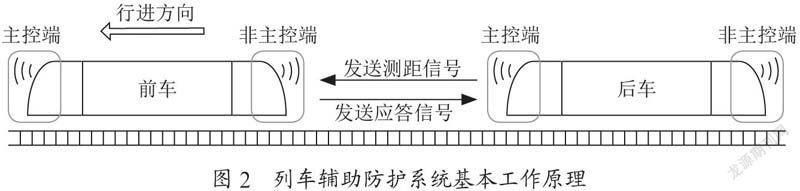
前后两车各自安装测距终端/天线后,通过无线信号相互通讯,在相应应答机制下,通过各自发送和接收信号的时间间隔计算两车间距(如图2所示),从而根据实时车距評估追尾风险,为司机提供有效辅助防护功能。
2.2 列车辅助防护系统主要功能
2.2.1 实时测距
列车辅助防护系统能够实时测量本车与前车的距离,通过与网络通信接口传送给列车网络系统(TCMS)进行前车实时车距显示。
2.2.2 接近列车身份辨别
列车辅助防护系统能够根据车辆的提供上下行线路信息或读取地面电子标签信息,辨别接近列车是否与本车处于相同股道,仅针对同股道列车进行车距监测。
2.2.3 危险车距评估及预警显示
综合考虑车辆制动能力、操作指令执行延时、前后车相对速度等因素,设置静态、动态多级预警模型。非ATP模式下,列车辅助防护系统根据预警模型实时评估前车车距,当满足预警条件时触发声光报警和TCMS报警提示。
2.2.4 试车线防护
试车线运行的列车,在非ATP模式下,列车辅助防护系统实时测量本车与试车线两端地面雷达设备距离,当与试车线两端距离满足预警条件时,为司机提供危险距离声光警示或自动施加紧急制动。
2.2.5 特殊场景防护
非ATP模式下,如需对车场线、车辆段、辅助线、存车线、折返线、交叉渡线等特殊运行场景进行危险车距评估,需要在车辆和地面安装射频标签(RFID标签),实现更加精准的位置辨识,配合实现特殊场景下的防护功能。
2.3 关键技术工程化实施方案
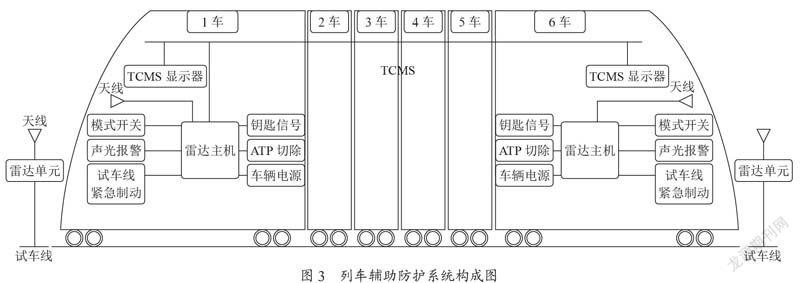
列车辅助防护系统主要由主机、测距模块(包含天线)、试车线设备(雷达单元、电源模块等)等组成,并设置模式开关和带蜂鸣器的报警指示灯。系统构成如图3所示。
列车辅助防护系统关键技术在于实时测距和危险车距准确评估,通过车辆控制功能集成设计实现相应场景下的辅助防护功能,具体实施方案如以下所示。
(1)模式选择。通过操纵台模式开关,可以人工选择列车辅助防护系统的工作模式,分为正线防护模式、试车线防护模式和切除模式。
(2)实时测距。通过二次雷达测距模块实时追踪运行前方同一股道的列车,测量本车与前车的相对距离,开阔直线段测距能力>1 km,测距精度±5%。
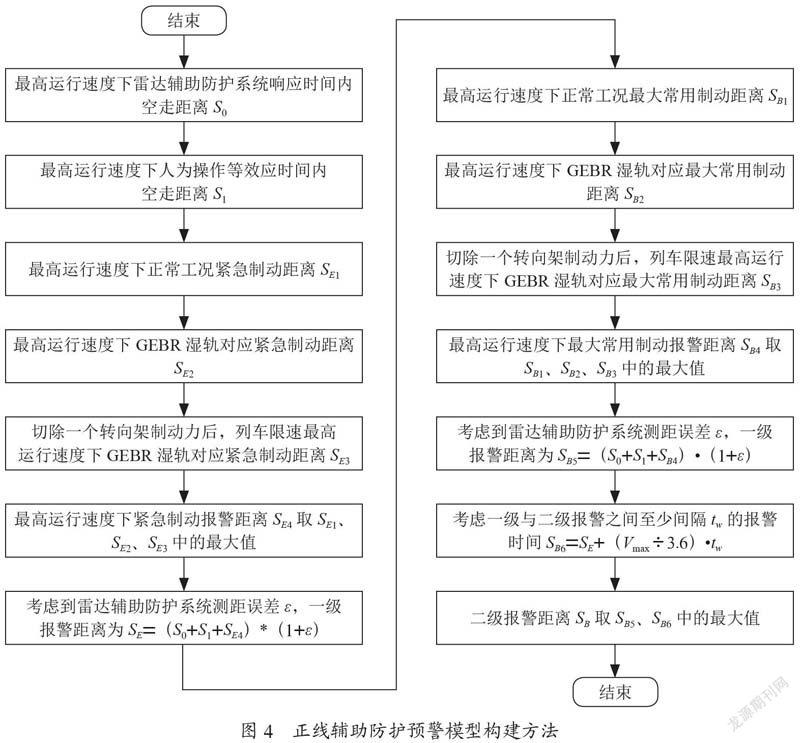
(3)危险车距评估。如图4所示,正线辅助防护预警模型构建需兼顾列车辅助防护系统的测距能力和列车制动性能,两级报警阈值需根据列车制动能力,在列车辅助防护系统可测距范围内确保合理的制动距离,避免前后列车碰撞事故的发生。
(4)试车线防护。如图5所示,试车线辅助防护预警模型构建采用划分速度区段的方法,根据不同速度区段计算不同报警级别的报警阈值,预留合理的制动距离,避免列车冲出试车线事故的发生,并且可以充分利用试车线有效行车区间。
(5)预警显示。通过司机室TCMS显示屏提供信息显示,包括实时车距显示、安全距离两级声光警示、设备工作状态和故障信息等。
2.4 现车应用情况总结
经现车试验和应用验证,列车辅助防护系统能够实现系统功能,但在调试过程中曾偶发测距距离跳跃以及测距通信中断的问题,最终通过优化测距滤波算法得以解决,主要措施如下文所示:
(1)增加测距模块时隙数量,确保测距终端接收到足够多的测距数据,优化系统对测距距离数据的处理。
(2)优化测距模块源代码中数据处理流程,修正测距模块算法,滤除异常的测距数据。
(3)增加阈值判断,将异常无效数据筛选掉,避免无效数据对拟合滤波算法的干扰。
(4)增加均值滤波,将一定时间内接收到的有效距离值取平均作为有效值,滤波后,距离数据将更加平滑,增强对跳变数据的抗干扰能力。
3 技术应用难点及问题
基于二次雷达测距原理的列车辅助防护系统逐步展开应用,随之也暴露出一些问题有待研究攻克和持续优化完善。
3.1 多目标识别和通信组网
二次雷达采用询问和应答的方式建立彼此通信链接,特殊工况下本车前向雷达可同时检测到多列车雷达信号,甚至包括本车尾端雷达信号,为此,从中准确辨别同股道前向列车尾端雷达信号,并确保与其建立稳定的通信链路尤为重要。
在现车应用中曾出现由于非目标雷达信号干扰占用通信资源,造成本车与目标雷达信号通信不稳定的情况,为此,有必要深入剖析其工作场景,综合列车运用信息准确辨别目标列车,利用频域和时域切割设计方法确保与目标对象的通信稳定性。
3.2 辅助防护预警模型构建
辅助防护预警模型通常考虑车辆最大常用制动和紧急制动距离、系统响应及人为操作时间,以及实时车速或两车相对速度等因素,通过多参量综合计算,再加之考虑异常工况下制动安全系数,构建以距离为核心的辅助防护预警模型,是危险车距准确评估的基础。
正线运行时,如无法实时可靠获得车辆运行速度,辅助防护预警阈值一般采用固定值,即不随车辆运行速度变化而变化,安全性较高;试车线运行时,因车辆可运行距离普遍较短(约为1~2 km),为最大化利用试车线有效运行距离,辅助防护预警阈值宜采用动态值,预警阈值将随本车速度动态调整。
为起到辅助防护功能,通常设置两级预警:Ⅰ级预警阈值以紧急制动距离为核心因素,当触发预警条件时,提示司机/自动施加紧急制动;Ⅱ级预警阈值以最大常用制动距离为核心因素,当触发Ⅱ级预警条件时,提示司机减速,加强瞭望并准备随时停车。其中如若涉及自动施加紧急制动,则需辅助防护系统需输出紧急制动指令,对系统可靠性和安全性要求较高。
3.3 防护场景功能测试
列车辅助防护系统静、动态测距功能,以及报警和显示功能可通过地面测试或现车试验进行双重验证,但针对隧道、弯道、坡道、交叉渡线等场景下的功能验证却较难实施,尤其对于各场景下多目标识别和通信稳定性很难通过环境模拟或线路试验进行充分验证。因此,需要在系统设计之初就预先考虑相应功能的完备测试方案,以提高系统可靠性和功能有效性。
3.4 测距能力有待提高
列车辅助防护系统有效探测距离需满足车辆制动距离及预警距离要求,对于最高时速80 km/h列车,一般要求直线测距距离不小于800 m;對于最高时速120 km/h列车,一般要求直线测距距离不小于1 000 m。即速度等级越高要求列车辅助防护系统的测距距离越长,并且雷达终端/天线一般安装于车内,司机室前窗玻璃会对其起到一定的信号衰减作用。同时,其测距误差也是一个重要测距性能指标,为保证测距、预警输出的准确性,一般要求任何工况下测距误差不超过5%,需要列车辅助防护系统考虑列车运行环境对测距精度的影响并采取校正措施。
4 结 论
基于二次雷达的列车辅助防护技术通过现车应用,将使其累积更多的实测数据和应用经验,必将得到快速提升和完善,但在多场景多目标精准识别、辅助防护预警模型优化、测距距离和测距精度提高等方面仍存在较大提升空间,同时,也可通过融合其他感知信息,提高目标检测准确率和系统可靠性。另外,由于处于技术应用初期阶段,各种工程应用方案和硬件设备较为多元化,需结合实际应用和技术发展进行沉淀和总结,逐步形成规范化、标准化的集成应用方案,实现基于二次雷达的列车辅助防护系统工作频段、系统架构、配置组成、机械及电气接口等技术要求的统一,促进其批量推广应用。
参考文献:
[1] 陈韶霞,孙永明,刘立月.基于GNSS的高速列车多传感器组合定位方法研究 [J].河北省科学院学报,2011,28(1):31-34+64.
[2] 王剑,苏昱,蔡伯根,等.高速列车追踪接近预警系统 [J].铁道学报,2014,36(12):56-61.
[3] 卢文玉.基于视觉的车辆防撞预警研究 [D].南京:南京航空航天大学,2011.
[4] 汪洋.近程汽车激光防撞雷达研究 [D].哈尔滨:哈尔滨工业大学,2014.
[5] 柯振宇.基于毫米波雷达的车辆纵向碰撞预警系统设计 [D].武汉:武汉理工大学,2014.
[6] 刘海波,盛蒙蒙,杨晓倩.一种车载毫米波列车防撞雷达系统研究 [J].雷达学报,2013(2):234-238.
[7] 刘敏.基于ATP列车辅助追踪预警系统研究[J].科技风,2017(11):69.
[8] 高岸梅.提高二次雷达系统识别概率和作用范围的设想[J].信息技术与信息化,2014(4):186-187.
作者简介:王延翠(1982—),女,汉族,吉林白山人,高级工程师,硕士研究生,研究方向:轨道交通车辆电气系统集成设计及智能化技术应用。