融合统计和几何特征的运动意图识别方法
2021-03-14唐少波
盛 敏,唐少波
(安庆师范大学数理学院,安徽安庆246133)
全世界因各种事故导致肢体残疾者众多,为改善下肢截肢者的生活质量,让其穿戴某种假肢。通过采集人体不同运动模式的步态周期数据识别下肢截肢者的运动意图是智能下肢假肢需要解决的关键技术问题之一。根据采集数据的信号源属性不同,下肢运动意图识别方法主要分两种[1]:(1)收集脑电波信息和人体表面肌电的信息等生物电数据,分析下肢截肢者运动趋势。(2)采集三轴加速度、三轴角速度、关节角度以及电容信息、足底压力信息等生物力学机械信号数据,判断下肢截肢者运动意图。
表面肌电信号(surface electromyography,sEMG)是产生肌肉力的生物电学信号,是更接近原始运动意图的信号,利用表面肌电信号构建的分类模型,可以在未做出动作前识别下一步的运动意图。Huang等选取脚跟落地和脚尖离地之间的sEMG信号,提出了基于sEMG的人体运动模式识别方法,对7种日常生活常见运动模式识别精度为92.6%[2]。但肌肉阻抗、皮肤汗液、毛发及电磁波等会干扰信息采集的稳定性和完整性,肌电信号强度对截肢者的截肢程度依赖性高[3],采用sEMG信号无法克服自身信息的不稳定性。随着机械信号传感技术趋于成熟稳定,机械信号传感器具有体积小、集成性强等优势。因此,本文采用生物力学机械信号型的传感器采集运动时序数据进行截止患者下肢的运动意图识别。
在基于智能下肢假肢的意图识别研究中,文献[4]采集了5种稳态运动模式和8种转换运动模式的数据用于训练,总体识别率为93.9%,但该工作未对用于分类模型训练的数据本身作过多考虑,运动意图识别有一定的滞后性。文献[5]采用残肢侧(患侧)在转换模式的摆动期数据作训练样本,识别8种转换运动模式,识别率为94.9%。文献[6]提出了一种基于机械传感器的运动意图识别方法,按照3种不同速度,采集在5种地形下稳态模式的运动数据,通过隐马尔科夫模型算法对其进行分类识别,识别率为95.8%。文献[7-9]针对多模态传感器数据融合以及在患侧采集的数据具有一定滞后性问题,对智能下肢假肢的运动模式进行了重定义,提出了利用单传感器采集截肢者健肢侧(简称健侧)处于摆动期13种运动模式的时序数据,研究智能下肢假肢运动意图识别,但该团队主要用到统计特征对下肢假肢运动意图进行识别,没有进一步探讨与挖掘特征构成方案。文献[10]采用傅里叶函数对数据拟合以体现运动模式的几何特征,提出了一种基于函数型数据分析的人体动态行为识别方法,该方法对一个周期的运动数据进行拟合,不适合于运动意图识别。基于此,本文针对运动意图识别的特点,仅采集截肢者健侧处于摆动期的时序数据,构造最值斜率,提出一种由统计特征与几何特征相结合的智能下肢假肢运动识别改进方法。
1 下肢运动类型相关概念
1.1 步态周期
从时间上来看,相同类型的下肢运动具有一定的周期特性,按照周期性可分为多个步态周期。
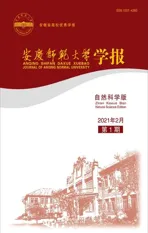
步态周期:行走过程中,从一侧脚跟着地开始到该脚跟再次着地为1个步态周期。由图1中的1号到8号构成。
支撑期:指下肢其中一侧接触地面和承受重力的时期,由两个双支撑期和一个单支撑期构成,约占步态周期的60%,由图1中的1、2、3、4、5号构成。
摆动期:指下肢其中一侧离开地面迈步再到落地之间的时期,约占40%,由图1中的6、7、8号构成。
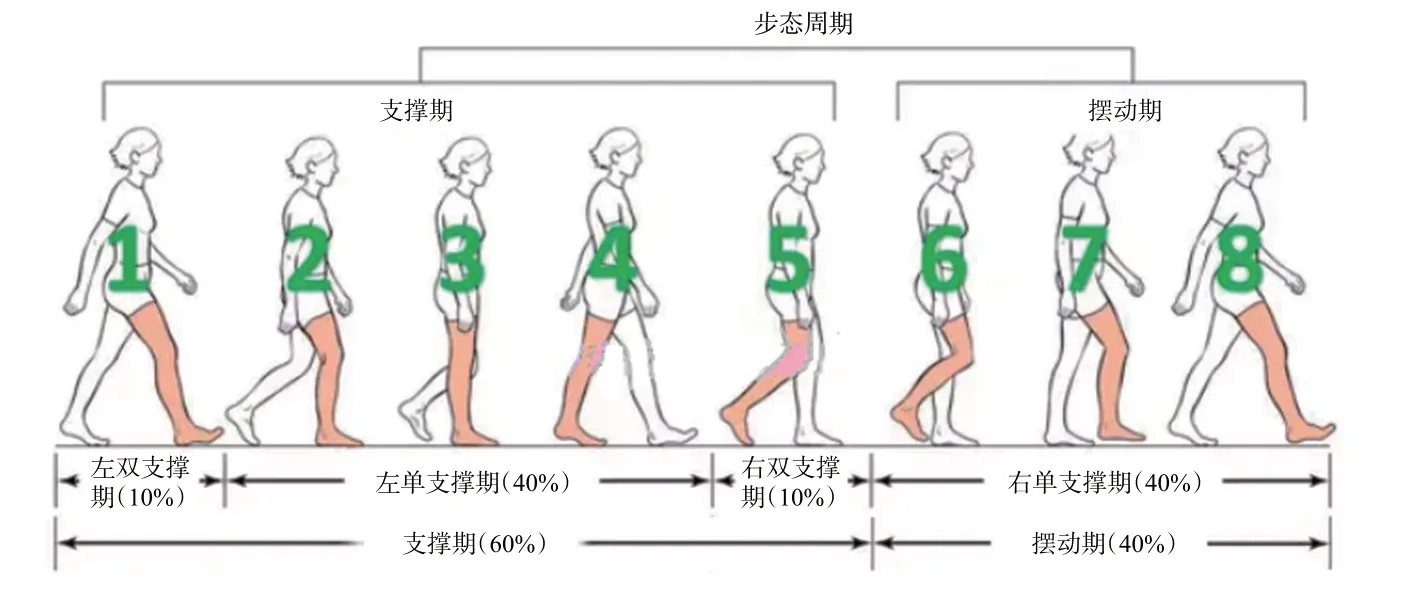
图1 完整的步态周期
一个步态周期中,按照规律性特点,支撑期可分成两种,双脚支撑期和单脚支撑期。
双脚支撑期:双足同时与地面接触,两个双脚支撑期分别发生于图1中的1号和5号。正常步行速度下,1号和5号各约占整个步态周期的10%。
单脚支撑期:两个单脚支撑期分别发生在图1中的2、3、4号和6、7、8号,该段时期各约占步态周期的40%。
1.2 步态类型
稳态类型:只涉及一种地形,双脚行走所采用的一种运动类型,如图2所示。

图2 稳态类型与稳态步
稳态步:任意一侧脚处在稳态类型下的运动,该侧脚整个摆动期的运动称为稳态步。
转换类型:从一种稳态运动类型到另一种稳态运动类型之间的转换运动类型。
转换步:促使向另一种运动类型转换的某侧脚运动,该侧脚整个摆动期的运动称为转换步,如图3所示。

图3 转换类型与转换步(走-上坡)
1.3 运动类型
从正常人的日常活动中可以观察到,残疾人需要的是能够在平地、上楼、下楼、上坡和下坡五种地形上有效行走以及后4种地形与平地地形之间的有效转换,涉及5种稳态步和8种转换步共13种运动类型(如表1所示)。
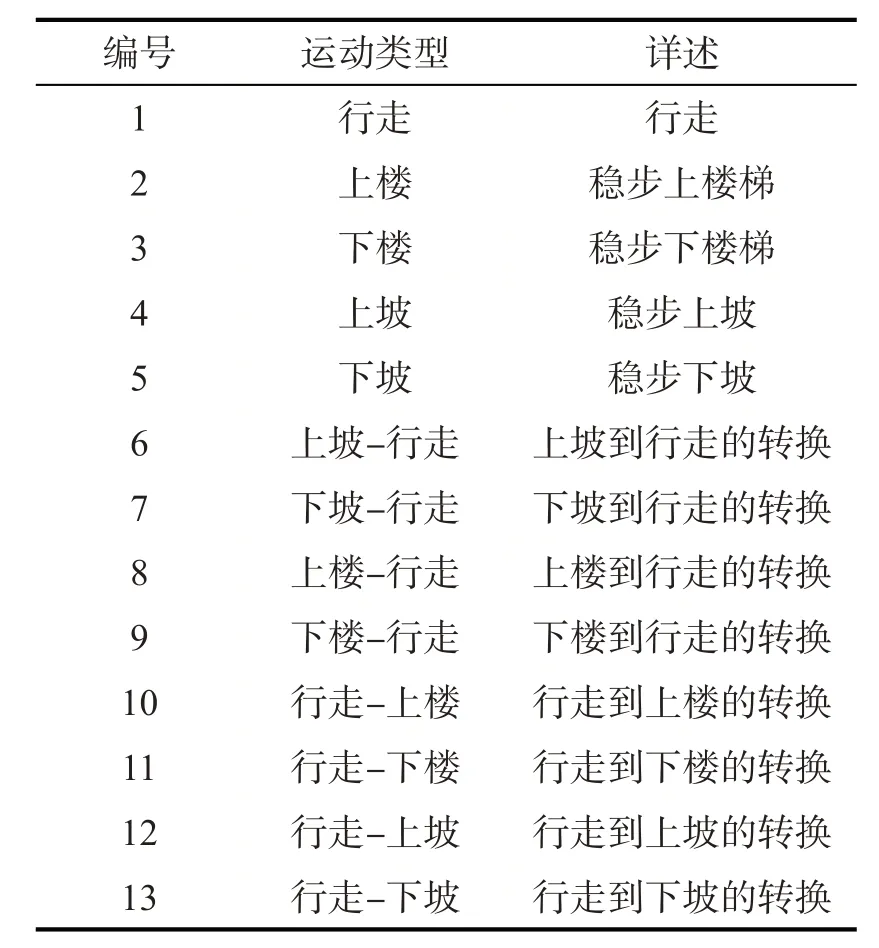
表1 运动类型
2 运动意图识别流程
从模式识别的角度来说,智能下肢假肢的意图识别流程一般是:对象空间-模式空间-特征空间-类型空间。对象空间指实验环境,如实验设备、实验场地、实验对象。模式空间侧重于下肢运动类别的明确化。特征空间是分类模型的特征构成,如加速度和角速度。类型空间则是在已经构建好的分类模型下对实时数据进行判别和归类,从而对运动意图实时识别。本文基于惯性传感器的运动意图识别流程如下:
离线采集信号→提取需要数据→加窗滤波去噪→构建特征空间→训练分类模型→在线识别意图。
1)采集实验人员在13类运动模式下各个惯性传感器生成节点的惯性传感器信号。2)提取健康下肢大腿、小腿和脚底3个传感器位于摆动期的数据。3)对数据使用移动平均滤波器进行滤波去噪处理。4)选择均值、方差、最值斜率作为一组特征构建特征空间。5)将样本带入分类算法中进行训练,生成有效的分类模型。6)用分类模型对新输入信号进行在线实时分类。
2.1 数据预处理
本文在训练模型前使用移动平均滤波器对原始数据进行去噪,噪声的异常极值点得到一定程度的平滑,对提取的最值斜率起到修正的效果。(图4为行走到上楼转换期间加速度信号处理前后对比)。对于13种运动类型,根据健侧脚部传感器采集到的脚尖离地起始帧作为起始点开始加窗处理,往后提取窗口长度为T的数据。考虑到样本中的一个摆动期长度范围是45~70帧,窗口长度T取45帧。既最大程度保留数据反映运动的能力,又避免过长帧数取到下一动作的数据,保证智能下肢假肢控制无滞后性。
图4 行走到上楼转换期间加速度时序数据。(a)处理前的加速度信号;(b)处理后的加速度信号
2.2 混合特征空间
最值斜率极差除以最值对应帧之间帧数差的商,它是运动数据中最值关于时间序列的几何特征,反应局部变化的快慢。
从人体运动学的角度来看,加速度和角速度的最大值反映出人体运动中肌肉产生的力(简称主动力)作用的最强时刻,最小值反映出自然重力作用的最强时刻。对于整个摆动期,前者侧重于人体运动的主观性,后者更强调自然重力的客观性。最大值到最小值的过渡反映出主动力向自然重力的改变。改变的快慢与两者关于帧数构成直线的斜率有关。因此,对于单个传感器某一维度的给定长度为N的一维信号a(t)( 1≤t≤N),定义最值斜率:

其中,a(ti)表示在ti时刻信号的最大值,a(tj)表示在tj时刻信号的最小值,ti、tj分别表示与最大值和最小值对应的第i帧和第j帧。
考虑到运动意图信号对实时性要求较高,对于几何特征的提取采用函数型数据分析方法拟合线性函数提取的最值斜率,可以较好地反映函数局部特性。与统计特征从整体水平分布上来判断运动意图不同,最值斜率更多的是从局部变化快慢来分析运动意图。
特征基从惯性传感器采集的一维数据中选取数据的一组特征,如加速度。
特征空间由选择的传感器个数和提取数据维数以及特征基共同构成。
能够采集到下肢动作数据的一共有腰部、大腿、小腿及脚踝4个部位的传感器。实验表明采用添加腰部传感器采集的数据,通过对人体运动重心的抓取以提高13种运动模式的识别精度,并未取得较好的效果。所以本文使用大腿、小腿和脚踝所采集的数据用于分类。
几何特征从局部范围去分析人体运动的意图,能有效弥补统计特征中对局部思考不足的缺陷,同时能降低计算的复杂程度,减少分类模型的训练成本。具体来说:均值反映人体运动的基本趋势,方差刻画人体运动的激烈程度,最值斜率代表局部改变的快慢。

其中,a(tn)表示tn时刻单个传感器采集的某一维数据,N表示采样帧数,A表示混合特征基。基于此,本文采用最值斜率(几何特征)、均值(统计特征)、方差(统计特征)构造混合特征基。
考虑到本文采用健侧的大腿、小腿及脚踝3个传感器,每个传感器采用6维数据(3维加速度和3维角速度)总共18维数据,对每一维的数据提取上述3个特征,因此本文的特征空间由54维特征数据构成。
3 实验结果
实验中采用的惯性传感单元采样频率为96 Hz,角速度量程是±2 000 dps,加速度量程是±24 g。可记录18维数据运动时序数据(3维加速度、3维角速度、3维速度、3维位移、4维四元数,2维触地状态)。实验一共征集了10名志愿者[8],其中含9名健康人和1名经股骨截肢者。9名健康人为5名男性和4名女性,身高范围为(160~180)cm,体重范围为(45~80)kg,年龄范围为(20~28)周岁。经股骨截肢者身高170 cm,体重80 kg,年龄为46岁,穿戴假肢14年。
志愿者惯性传感器穿戴位置如图5所示。1名经股骨截肢者,在医生的指导下完成相关运动(如图6所示)。现实生活中,不论正常人还是下肢截肢者遇到上下楼或上下坡的时候,先迈左脚还是右脚,具有一定的随机性。根据文献[8]可知,采集正常下肢处于摆动期数据,根据对称性能更好地识别出转换步,采用文献[8]设计的迈步顺序(如表2所示)进行试验。受试者模拟左腿截肢者在5种不同的地形上进行5种稳态模式和8种转换模式的数据采集,所有模式都执行10遍。共采集了9名正常人13类动作的1 170个样本、1名截肢者动作的130个样本。图6(a)为截肢者穿戴的假肢,图6(b)为截肢者下楼实验。实验中用SVM采用十次五折交叉验证方法对算法进行评估。具体实验给果如下页表3所示。

图5 惯性传感器位置示意图

图6 假肢及截肢者下楼实验。(a)假肢;(b)截肢者下楼实验

表2 运动类型和迈步顺序
借鉴文献[7-9]的方法,采集来自健侧的大腿、小腿及脚踝处的运动数据,以更好地识别出健侧的8种转换模式运动意图,由对称映射的关系预测出截肢者的下一运动模式。从截肢者日常生活中可以观察到,健肢进行转换完,假肢才会切换成另一种运动。等健侧转换结束,再去调节假肢的控制参数,可以使得智能下肢假肢及时转换行走某种稳态运动模式。由表3可知,在传感器类型和数量方面,与文献[4-7]相比,只使用同种类型的3个传感器,避免了数据融合的问题。在特征基方面,与4个特征构成的特征基相比,少了一个特征,进而特征维数减少,降低了算法的计算复杂度和训练模型的成本。实验结果表明,无论是5种稳态运动类型,还是13种运动类型,在识别精度上依然具有较好的表现。

表3 统计型特征基与混合特征基的识别效果对比
由此可见,最值斜率作为一种几何特征和两种统计特征构成的混合特征基为降维提供了一种新思路,实验结果验证了混合特征基的合理性。由表3可见,训练模型对稳态步和所有动作的识别精度有所提高,混合特征基可以作为一种运动意图识别改进方法用于研究。
4 总结
本文提出了一种惯性传感器信号驱动的单侧下肢截肢者的运动意图识别方法,用函数型方法提取的几何特征与统计特征相结合的方式,对特征基进行了重新构造,从而进一步优化了特征空间。传统特征基的运动意图识别方法,对统计特征依赖性较大,而统计特征对局部变化的刻画不够准确,提取的几何特征可以较好地弥补这类缺陷。