基于PLC 的声扫显微镜自动上下片系统设计
2021-03-10赵英伟郝晓亮张文朋
赵英伟,郝晓亮,张文朋
( 中国电子科技集团公司第十三研究所,河北 石家庄050051)
MEMS 器件加工中经常使用倒装焊工艺,超声波扫描显微镜是用来检测产品键合质量的重要仪器。它利用声学显微成像技术,在超声波扫描时,通常需要把被检测圆片放置在纯水中,纯水作为传输介质,提高检测精度。按操作方式可分为全自动型、手动型。在手动模式下进水排水、上下片的操作不方便。
为满足生产需求,设计了超声扫描显微镜自动上下片系统,主要由自动水气管理部分和机械运动控制部分组成。
1 机械运动系统设计
机械运动系统由承片台、滑车、导轨和水平推拉机构等组成,如图1 所示。承片台尺寸为200 mm×200 mm,带有φ150 mm、φ200 mm(6 英寸/8 英寸)晶圆兼容的吸盘。承片台固定在滑车上,随滑车一起沿S 型导轨往复运动。滑车尺寸400 mm×400 mm,由4 个滚动轴承支撑,其受力侧的2 个轴承为三角型飞碟轴承。导轨内侧设计安装V 型凹槽结构,与飞碟轴承配合保证运动轨迹。滑车初始位置在高位,可以进行取放片操作;工作位置在低位,浸入水箱中,可以进行扫描检测。上下位置高度差为100 mm。

图1 机械运动结构示意图和S 型导轨计图
丝杠、滑杆、滑块和拉杆组成水平推拉机构。丝杠带动滑块,沿着滑杆,通过拉杆推拉滑车。拉杆两端为铰链结构,长度可微调。在拉杆的推拉力作用下,滑车可以沿着导轨上下运动。丝杠两端设计了可调限位螺丝,限定运动的极限位置。
S 型导轨路径采用竖曲线设计,曲线函数一般采用二项式抛物线,或圆曲线[1]。结合应用需求,为方便加工,选用了圆曲线设计,如图2 所示。设计方案简单,结构紧凑,负载变化均匀,运动平滑。

图2 S 型导轨运动路径设计
2 水路和气路设计
水路系统由进水阀、排水阀、循环泵、循环阀、过滤器等构成,具有自动给排水和水循环功能。水路示意图如图3 所示。采用浮子开关和液位传感器测量控制水位,在上位机的水气管理界面中可以设置水位。

图3 水箱自动给排水系统图
真空气路系统由手动阀、电磁阀、真空发生器和气体净化器等组成,如图4 所示。真空发生器型号选用费斯托FESTO VAD-1/8,为单体结构,采用文丘里管的工作原理。
电磁阀用来打开和关闭真空。手柄阀1 通过十字叉环来吸附φ100 mm 晶圆片。手柄阀2 通过3 个相通的吸孔、与手柄阀1 一起使用吸附φ150 mm 晶圆片。手动阀3 完成承片台吸盘的吸片和释放动作,防止水被倒吸入真空管路。
此外,气体净化器利用流过真空发生器的气体,输出洁净气体,以净化被测水域上方的空气。在满足使用要求的前提下应减少其耗气量。

图4 系统真空气路示意图
3 控制系统配置
3.1 PLC 选型X20CP1382
X20CP1382 属于紧凑型Compact CPU 系列,结合了PLC 通用控制平台和运动控制功能。基于PC 架构,配备了一个Intelx86 400 MHz 主频CPU、POWERLINK、实时以太网等接口。拥有3个集成I/O 模块,提供了30 路数字量的输入/ 输出和两路模拟量输入。该CPU 可免维护运行,有强大的HMI 开发工具。系统采用实时多任务操作系统,最快任务周期达到1 ms,最多8 个任务等级。
X20CP1382 完成系统信号输入/输出和步进电机驱动。上位机通过PLC 的EHT 接口进行通讯。
3.2 输入/输出(I/O)接口设计
数字输入信号为24 V 漏型输入,数字输出信号为24 V 源型输出。I/O 信号分布表见表1。PLC通过控制一个继电器来启停循环泵。水位传感器型号为UT180023,输出电流0~40 mA,该输出信号接入PLC 的模拟输入AI+和AI-。

表1 I/O 信号分布
3.3 X20 总线中继模块
总线中继模块选用BT9100,可以为X20 系统提供无缝连接,进行通讯扩展。它采用分布式的导轨式系统底板,支持带电热拔插,站点之间的距离可以达到100 m。PLC 通过BT9100 与步进电机的驱动模块进行通讯。
4 运动控制的实现方案
电机控制是自动化控制中的重点之一,这主要是因为它的费用在整个自动化方案中占比较大。本系统需要完成点对点的位置控制,运动控制由步进电机、步进电机伺服驱动器和电源等组成。PLC 运动控制功能设计方案可以省时,更经济高效。运动控制方案如图5 所示。
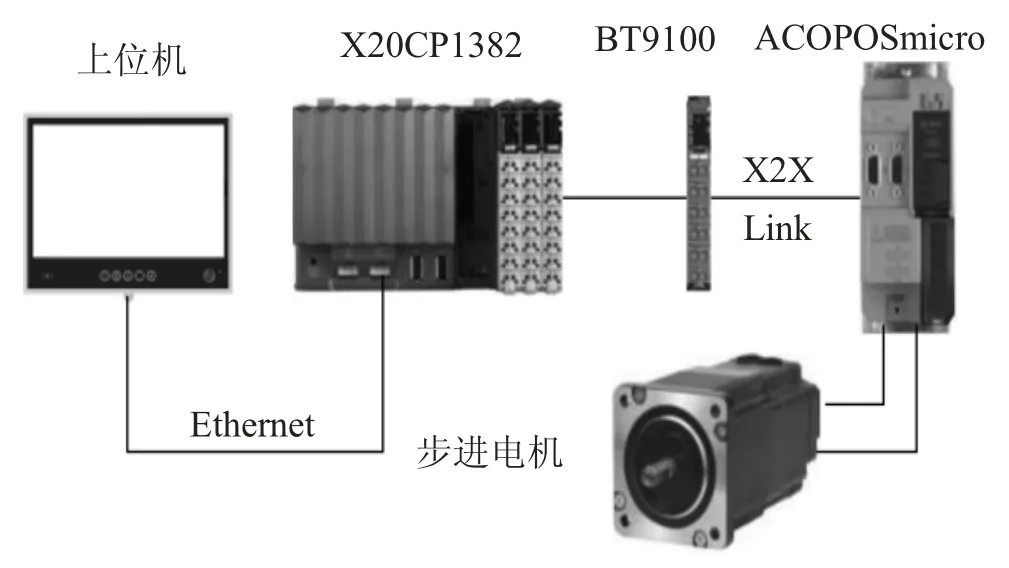
图5 电机伺服驱动器的控制示意图
4.1 步进电机
步进电机型号为80MPF5.500D113-01。最大驱动电源电压可达80 V(DC),电流5 A。12 位的SSI 绝对值编码器,输出4 位信号:Data,nData,CLK,nCLK。编码器有助于在宽负载力矩的情况下定位更精确。
该电机的保持转矩3.5 N·m,失速转矩为2.5 N·m。采用60 mm 法兰,3 级齿轮减速,带刹车功能,刹车扭矩1.5~2 N·m。由永磁铁提供刹车力,刹车松开用24 V 直流电压。
大多数的两相混合是步进电机的步进角度1.8°,较小的步进角会导致较差的转矩特性。支持微步步进的驱动器可以实现更高分辨率。根据速度基本的步进角自动分解为最大可能的微步,保证定位精确的同时,运行平滑。
4.2 步进电机伺服驱动器
伺服驱动器选用贝加莱ACOPOSmicro 系列的80SD100XD.C033。它为低功耗应用提供多达两轴驱动模块,2 个X2X Link 接口,2 个SSI 绝对值编码器输入。其电源电压为24~64 V(DC),10 A 连续电流,具有安全停车(STO)功能。
ACOPOS 驱动器通过BT9100 以X2X Link 方式连接在X20 控制器上。驱动器通过电源线给电机供电,电机通过编码器线给驱动器反馈位置。
分别设置保持电流、额定电流、最大电流,电流精度可以达1%。通过改变电流,常见的共振问题显著下降。由于独立的线圈电流调节,电机在所需的电流下工作,减少不必的发热,降低功率损耗,延长使用寿命,工作更可靠。
电机驱动器的电压选择为24 V(DC),由输出电压在22.5~29.5 V 范围内可调,输出电流10 A的电源模块提供。
5 贝加莱Automation Studio 开发系统
基于Windows 的开发系统,可以轻松地完成复杂系统的设置与编程、电机和驱动器的仿真,使用PLCopen 兼容的库,减少开发时间。
首先添加项目的CPU、BT9100、驱动模块等硬件,同时完成硬件参数的配置和初始化。在贝加莱运动控制中,可以通过PLCopen 和CNC、SDC 等,把步进电机作为一个伺服驱动来进行开发。
水气管理系统需要定义设置I/O 变量,在I/O mapping 中和PLC 的输入/ 输出硬件关联。可以采用I/O board 进行接口功能仿真。
B&R 的运动控制解决方案是完全集成在AS之中。级联控制概念是贝加莱驱动器的核心,开发系统的NC Test 工具提供诊断和调试功能,可以使用自整定功能确定三环控制参数,优化速度控制环和位置控制环,而电流环由伺服驱动器自动设置参数。设置加加速度时间t_jolt 可以将T 型曲线变为S 型曲线,减弱速度变化导致的震荡[2,3]。如图6 所示,通过优化控制参数来提高运动控制质量。
开发软件提供了负载仿真,通过建立负载的数学模型,对步进电机转速- 转矩特性进行仿真。确认电机选型是否适合负载要求,以避免出现丢步现象。
利用系统的Visu 模块设计了友好的人机界面,包括运动控制系统,水气管理系统,各系统参数设置和状态显示等界面。通过设置网络连接,设定同一网段的IP 地址,内置VNC Server 和VNC Viewer 实现PLC 和上位机的通讯控制。

图6 不同加速度时间下的运动曲线对比图
6 结论
该设计的优点是采用机电一体化运动控制解决方案。系统整体设计简洁,结构紧凑,改装方便。V 型沟槽和S 型导轨设计,使得小车上下运动平滑,运动控制系统成本低,运行可靠。
设计具有可升级性,选用的电机驱动器具有两路输出,方便扩展改进。可利用双轴同步技术,使2 个电机同步运动,实现滑台双侧同时推拉。
还可以利用VNC 远程控制技术,使远程计算
机通过VNC Viewer 实现系统的远程控制。
