一种多特征约束的路面点云精简方法
2021-03-03刘如飞杨继奔任红伟柴永宁
刘如飞,杨继奔,任红伟,柴永宁
(1.山东科技大学 测绘与空间信息学院,山东 青岛 266590;2.交通运输部公路科学研究所,北京 100088)
0 引言
车载激光扫描系统能够快速获取高密度、高精度的道路点云数据,从点云中可获得道路基础设施的三维信息,对智能交通、应急管理以及道路养护具有重要意义,但海量点云数据中含有大量冗余信息,给管理与应用带来极大的挑战[1-2]。根据道路数字化管养发展需求,路面主要管理对象包括路面边界位置、路面坑槽、沉陷、裂缝等破损目标,均为路面点云三维特征。因此,在路面点云精简过程中,如何建立一种主要目标保留机制,支撑路面破损分析重构,具有重要的理论与实际意义。
目前,三维点云数据精简方法主要分为基于拓扑结构和基于特征保留两种。Weir等[3]利用八叉树结构循环递归地对点云外包围盒进行拆分,用最小包围盒中心点代替所有点。该类基于拓扑结构的点云精简方法虽然简单高效,但属于均匀采样,不能顾全模型特征。Xi等[4]基于最小距离,利用最小二乘曲面拟合计算平均曲率和法向,然后基于二者交叉保留特征点。Miao等[5]采用均值移位聚类模式的曲率感知自适应重采样方法精简点云,能保留明显特征点,获得非均匀精简结果。Zhang等[6]引入熵的概念进行点云精简,将每一段的形状特征与自然二次曲面的精简模型进行匹配,设置规则进行简化。Yang等[7]将L-1中值和基于泊松分布的区域生长算法相结合,引入k+1邻域计算点云的特征描述值,实现多阈值的特征保留。Han等[8]在利用法向量检测边缘点的基础上,根据法向量估值量化内部点,迭代删除重要性最小点,直到满足精简率。Wei等[9]通过计算邻域点法向量与参考平面夹角,建立局部熵模型,根据局部熵的大小进行精简。李金涛等[10]根据曲率来反映点云中的特征分布,利用对数函数分级后的点云划分空间栅格,按照分层等级设立点云精简规则。上述基于特征保留的精简方法多用于逆向工程中,主要针对利用固定站得到的点云数据,数据获取不受外界干扰,质量较高,特征分明且数据量较小,精简过程中不用考虑空洞以及边界问题。对于道路路面自然模型,适用性不强。
方程喜等[11]通过计算平均曲率来判别特征点,并利用标记法解决点云空洞问题。王勇等[12]对点云数据进行扇形分块,然后分别使用最低点法和重心法进行点云精简。杜浩等[13]通过选取种子点构建不规则三角网,然后选取非种子点中的地形特征点进行加密,最后使用邻近三角面的测试策略剔除冗余点。Pamela等[14]利用搜索半径查找邻域点,然后通过高差阈值迭代删除冗余点。上述方法针对大范围地形以及公路勘测设计点云进行精简,但特征判别参数单一,能保留路缘或者变形较大的地物特征,对于车载激光扫描系统获取的含有破损等局部特征以及边界特征的道路路面点云,特征保留效果较差,不能支撑路面破损状况分析。
针对以上问题,本文充分分析路面点云的空间分布和统计特征,提出一种多特征约束的路面点云精简方法,有效降低点云数据量的同时保留路面细节特征。
1 路面点云精简方法
本文所提出的精简方法主要包括以下步骤。首先,对车载激光点云进行预处理,去除路面点云中的噪声,建立栅格与KD树混合索引;然后,针对路面破损以及路面边界建立特征约束,在精简过程中保留路面主要目标;最后,进行平坦区域均匀栅格重心精简。算法流程如图1所示。

图1 算法流程图
1.1 点云数据预处理
首先以路缘作为道路边界,进行点云滤波,得到路面点云数据。由于碎石、落叶等干扰物,存在非路面噪点,取点云横剖面,如图2所示。可以看出,路面平坦处高程起伏较小,特征处高程起伏较大,呈连续分布,而噪声点高于路面且高程起伏较大,存在突变性,数量稀疏。为防止噪声对后续计算的影响,统计路面点云高程分布规律去除噪声点[15]。为确保路面边界的完整性,利用基于三角网格的空洞修补算法对滤波后的点云空洞进行修补[16]。

图2 路面点云剖面示意图
针对海量路面点云查询索引速度慢问题,建立栅格与KD树结合的混合索引。将点云沿坐标轴方向划分空间栅格,计算栅格的索引号进行线性排列。查找k邻域时,首先根据点坐标计算出所在栅格索引号,然后对栅格中的点利用KD树进行邻域查询;若未能找到足够邻域点,则根据栅格索引号查询点所在栅格的相邻栅格,再对多个栅格中的点利用KD树进行邻域查询;若找到足够邻域点,且查找到的相邻栅格包含最外围栅格,则查找结束,否则比较邻域半径与该点到相邻栅格X、Y方向上四个面的距离,如果大于一个或多个面的距离,继续查询相邻栅格进行邻域查询,直到满足要求。
1.2 路面破损约束精简
选取反映点云离散程度的主成分分析特征值、反映局部曲面变化程度的法向量夹角均值和反映局部曲面弯曲程度的平均曲率作为点云特征描述子,构建多特征描述模型,对路面三维破损特征点进行约束保留。
1)特征值计算分析。根据点Pi的邻域Pj(j=1,2,3,…,k)构建协方差矩阵,如式(1)所示。
(1)

路面特征区域空间形状的不规则性导致邻域点对局部特征产生影响不同[17],建立空间距离约束,引入权函数修正协方差矩阵,如式(2)所示。
(2)
(3)


图3 不同区域点的特征值分布示意图
2)法向夹角计算分析。根据协方差矩阵计算各点法向量[18],记点Pi的法向量为ni,邻域点Pj的法向量为nj,则点Pi与邻域点的法向量夹角均值如式(4)所示。
(4)

路面平坦区域点云高程变化较小,各点的法向量基本处于平行状态;特征区域点云高程突变,法向量夹角较大。
3)平均曲率计算分析。根据二次曲面基本量计算平均曲率。构建曲面参数方程,如式(5)所示。
r=r(x(u,v),y(u,v),z(u,v))
(5)
计算一阶和二阶偏导数ru、rv、ruu、ruv、rvv,曲面单位法矢s表达如式(6)所示。
(6)
计算曲面基本量表达如式(7)所示。
(7)
式中:E、F、G为曲面第一基本量;L、M、N为曲面第二基本量。这些值在给定点均为常数,则平均曲率H如式(8)所示。
(8)
4)多特征描述模型建立。路面点云中,点所在局部区域变化越剧烈,则特征值、法向量夹角均值、平均曲率的值越大,为特征点的可能性越大。结合特征描述子建立多特征描述模型,利用多特征描述值作为约束,保留破损特征点。由于各特征描述子数值分布区间不同,为使特征描述子具有同等敏感性,将数量级进行归一化。对任意点,根据邻域点特征描述子均值计算中误差,如式(9)所示。
(9)
(10)

统计特征描述子误差,如图4(a)、图4(b)、图4(c)所示,呈正态分布。根据偶然误差正态分布规律,两倍中误差涵盖99.54%的误差值,可认为在该范围内的为偶然误差,即路面固有粗糙度以及变化较小区域;超过该范围的可认为是粗差,即路面特征变化剧烈区域。为防止粗差点在归一化计算时占较大权重,以两倍中误差作为特征描述子误差分布截断点,统计该区间内点数,建立数量级归一化多特征描述模型,如式(11)所示。
(11)
为降低人为设定特征约束阈值的不确定性,引入路面粗糙度[19]进行特征点约束保留。计算点到邻域拟合平面的欧式距离oi;统计oi>ηRd的点数T(η为特征点数量控制系数),作为路面破损点数参考;最后对Di进行降序排序,取前T个点为路面破损目标点。
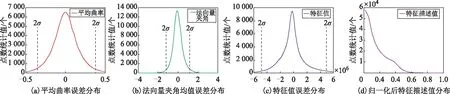
图4 特征描述子误差及特征描述值分布示意图
1.3 边界与平坦区域精简
1)路面边界约束精简。通过对边界点的邻域分布进行分析,采用分布均匀性约束法对路面边界特征点进行保留。根据点Pi的法向量ni构建投影面,投影面的函数形式如式(12)所示。
(12)
将邻域点投影至投影面,过点Pi分别平行XOY、XOZ、YOZ作参考面,参考面将投影面分为两部分。内部点的邻域分布均匀,参考面两侧投影点数量基本相等,如图5(a)所示;边界点的邻域分布不均匀,参考面两侧投影点数量相差较大,如图5(b)所示。统计参考面两侧投影点数量,若存在某个参考面两侧投影点数量差值与邻域点数的比值大于设定阈值,认为是路面边界点,反之为内部点。
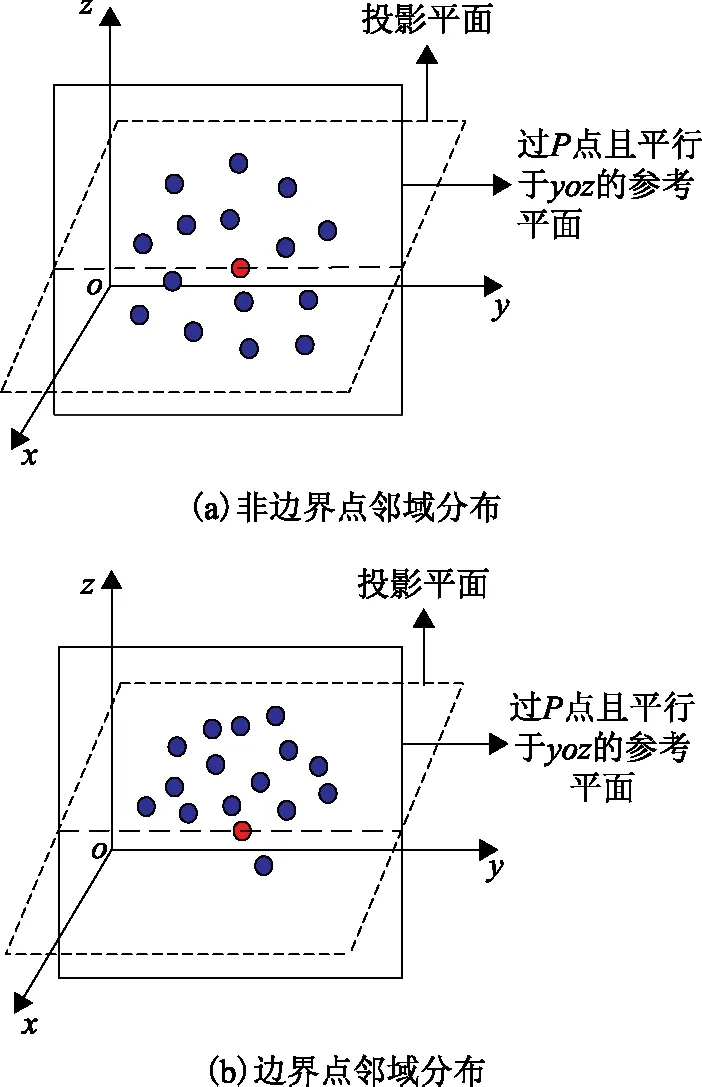
图5 点云邻域点投影分布示意图
2)平坦区域精简。根据约束条件进行精简后,剩余点的特征描述值较小,为路面平坦区域。为保证平坦区域均匀采样,利用栅格重心法进行精简。遍历栅格计算重心位置,保留距离重心最近的点,删除其余点,完成平坦区域点云精简。
2 实验分析
选取多为重型车辆通行路段,利用某车载激光扫描系统采集单行驶方向点云,该系统扫描点频为100万点/秒,线频200 Hz,空间定位精度3 cm,相对测距精度1 mm,能够获取还原路面真三维状况的点云数据,截取破损严重路段点云进行实验。其中路段Ⅰ共200 591个点,扫描线平均间距3 cm,线上平均点间距3 cm;路段Ⅱ共961 547个点,扫描线平均间距2 cm,线上平均点间距1 cm。路面破损目标包括坑槽、拥包、裂缝及破碎等。
经实地测量分析,路段Ⅰ实验参数为:栅格步长dstep=0.15 m,k=25,Rd=1 mm,η=2.5,边界点判定阈值Ethe=0.60。路段Ⅱ实验参数为:栅格步长dstep=0.12 m,k=30,Rd=0.85 mm,η=2.0,边界点判定阈值Ethe=0.65。
将本文方法与随机采样方法、DDR方法以及曲率标记方法进行对比,四种方法精简结果如表1所示。在精简率接近下,随机采样方法效率最高,但忽略特征。DDR方法和曲率标记方法效率基本接近。由于本文算法在精简过程中计算多个特征描述子,导致运行效率稍低于二者,但特征区域最为清晰,运行时长处于合理范围内,证明本文方法在保留特征的同时有较好的精简效率。路面精简点云如图6和图7所示。
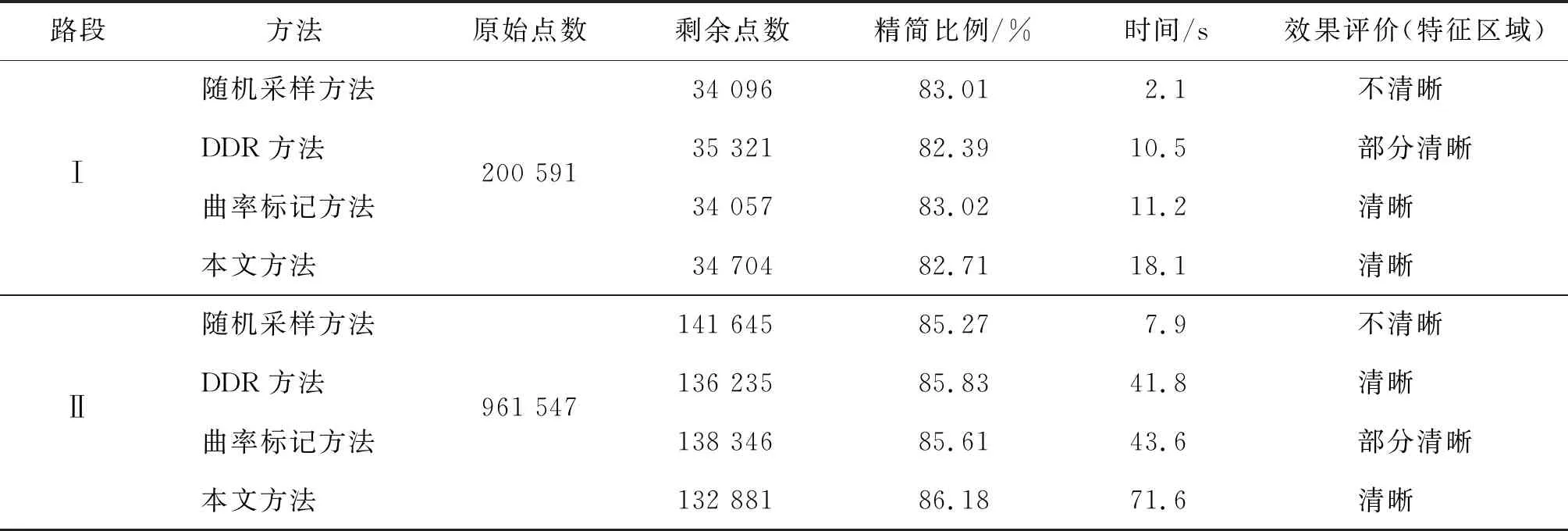
表1 四种精简方法对比
图6、图7显示,随机采样方法精简的路面点云较均匀,未产生空洞,但仍存在数据冗余;DDR和曲率标记方法能保留部分特征点,但由于判别参数单一,导致部分特征区域保留效果较差,如图6中椭圆圈出的小范围破碎以及图7(e)中人工修补的裂缝,而且DDR方法会产生空洞,影响路面重建效果;本文建立的特征约束方法能在精简过程中保留密集目标点,确保破损区域的特征细节,而且完整保留了路面边界点,未产生残缺,在平坦区域能得到均匀精简结果。
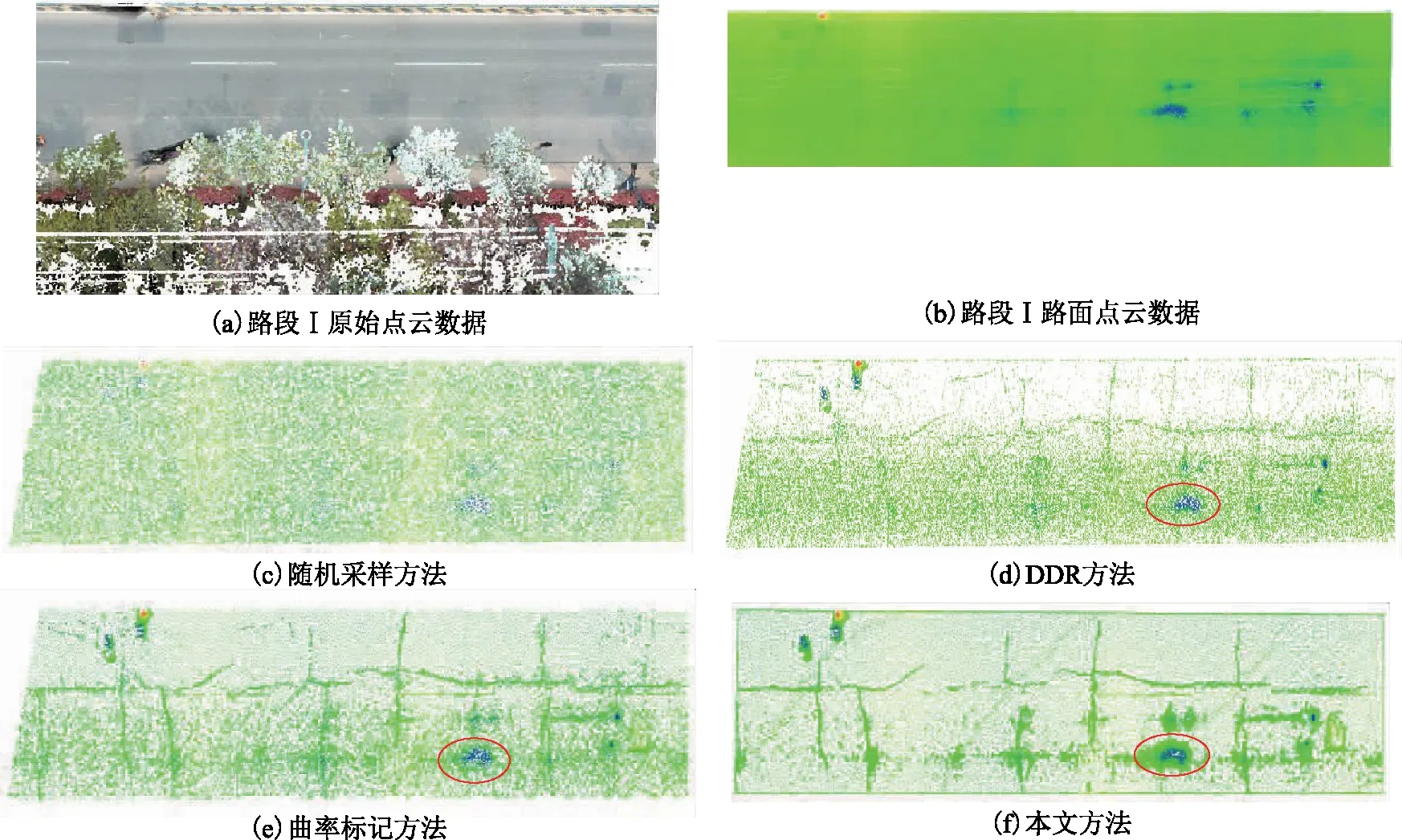
图6 路段Ⅰ四种方法精简效果
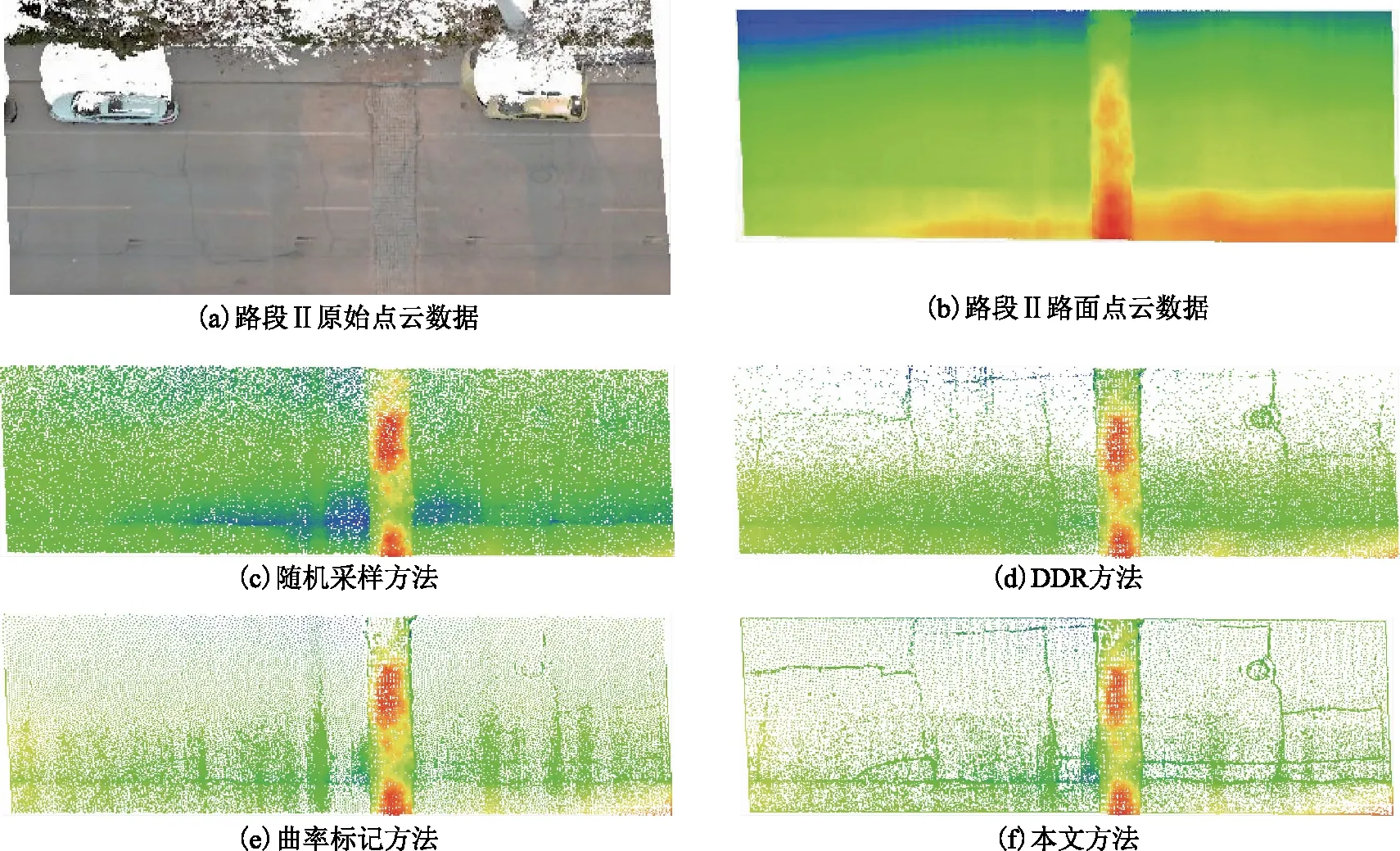
图7 路段Ⅱ四种方法精简效果
为了更客观评估不同精简方法特征保留效果,对精简后点云构建三角网[20],选取部分破损区域三角网格以及面片进行对比,如图8、图9所示。
图8显示,在精简率接近的情况下,本文方法在拥包、裂缝、破碎等破损区域的三角网更密集,完整性以及特征细节还原效果更好,更接近原始路面模型。图9显示,本文方法精简后重建的人工修补部分更为完整,与原始数据构建的三角面片模型几乎无区别,其余两种方法存在特征细节缺失,如图9中椭圆和矩形圈出的区域所示。可以看出,本文方法特征保留效果最好。
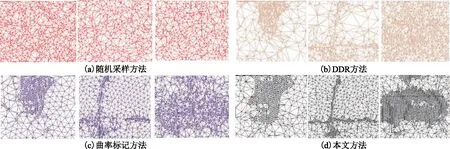
图8 路段Ⅰ精简后破损区域三角网格重建效果
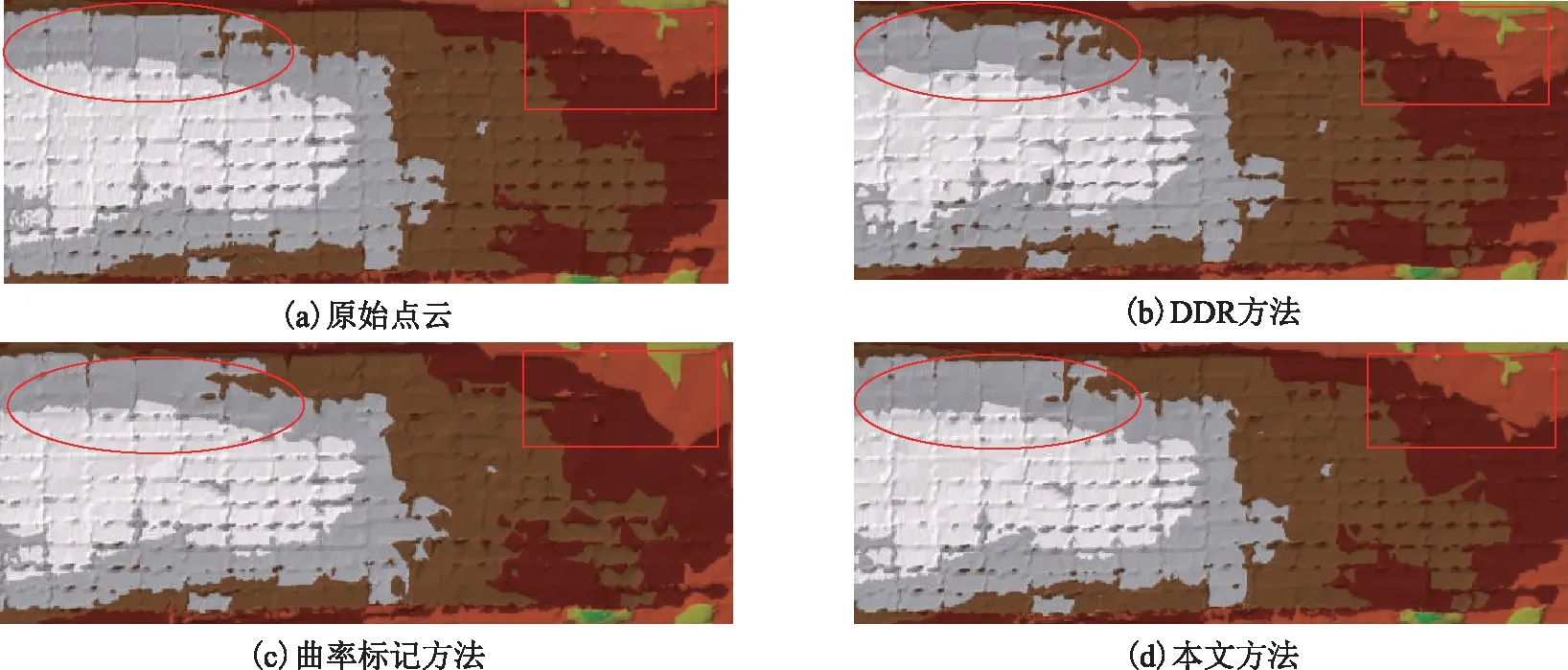
图9 路段Ⅱ精简后人工修补区域三角面片重建效果
三种基于特征保留的精简方法仍存在遗漏情况,个别裂缝位于扫描线之间,坑槽被异物覆盖,轻微破损等。为了评估特征保留率,选取长距离单车道路面点云进行实验,局部结果如图10所示。可以看出,保留特征点数接近的情况下,对于整体破碎严重的中间车道,三种方法均能保留,从图10(e)可以看出本文所提方法完整保留了路面边界。对于其他类型破损,选取原始点云和全景以及特征保留后点云,通过人工判读进行统计,根据式(13)评价路面精简点云特征保留率(Keep),统计结果见表2。
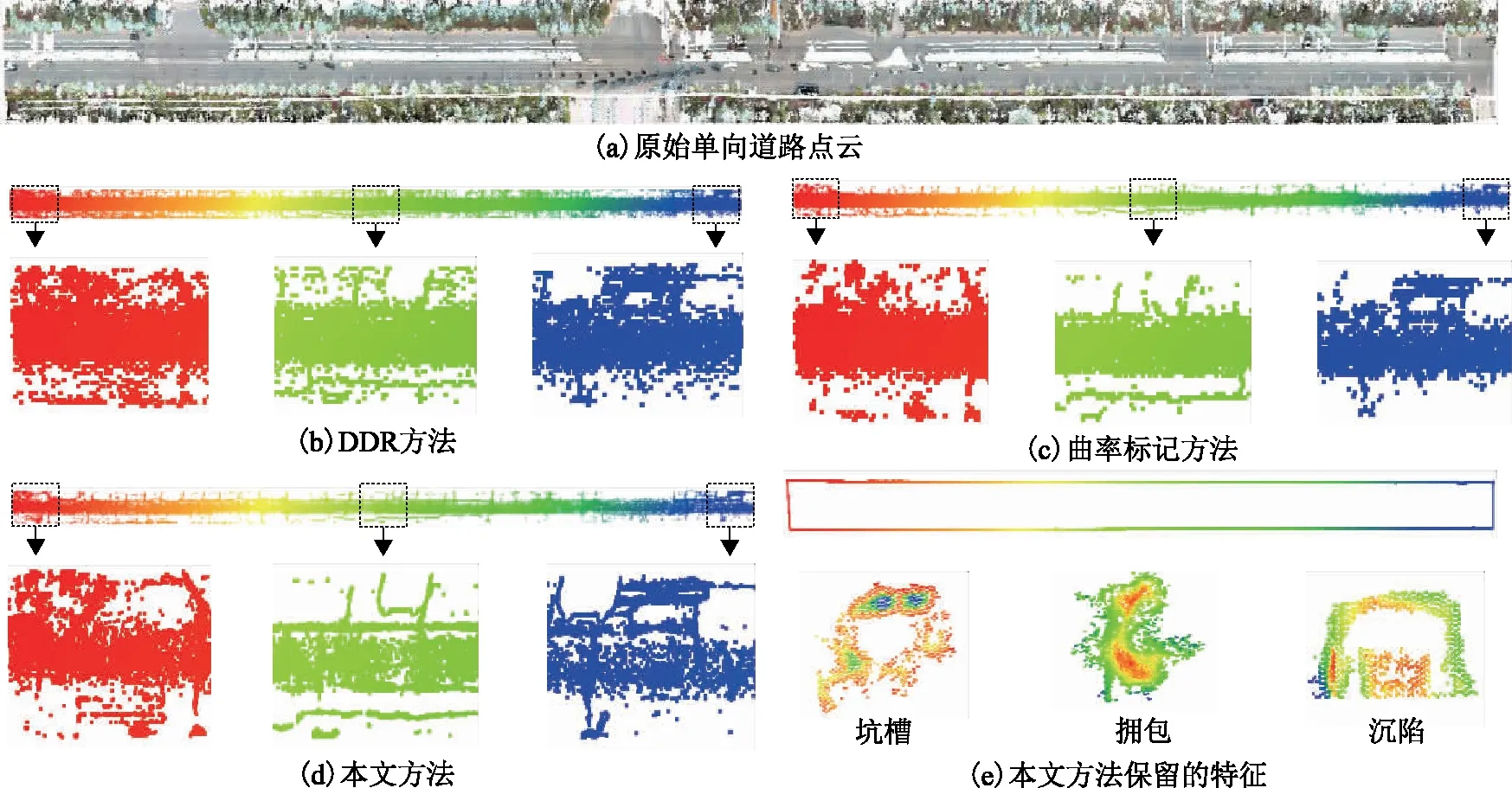
图10 原始路面点云与特征保留结果

(13)
式中:TP为保留的破损数量:FN为未能保留的数量。
表2中的统计结果显示:DDR以及曲率标记方法对路面拥包保留率较低,这是由于拥包在局部范围呈缓慢变化,单一特征很难识别;三种方法中,本文所提出方法对不同破损特征保留效果最好,整体特征保留率达到92.04%,说明本文建立的多特征约束机制能够保留不同类型的路面破损目标,为后续的路面破损状况分析提供支撑,具有较强的适用性。

表2 路面特征保留结果定量分析
3 结束语
本文充分分析车载激光路面点云特征,提出一种多特征约束的路面点云精简方法。实验结果表明,该方法在保留路面主要目标的同时具有较高的精简率。通过与其他方法进行对比,证明了本文方法的可靠性,路面精简点云能够支撑道路数字化管养发展需求。此外,该方法主要针对道路路面点云,未来将重点研究车载激光点云中非路面点云精简方法。
